信号检测与估计理论(复习题解)
信号检测与估计试题——答案(不完整版)
一、概念:1. 匹配滤波器。
概念:所谓匹配滤波器是指输出判决时刻信噪比最大的最佳线性滤波器。
应用:在数字信号检测和雷达信号的检测中具有特别重要的意义。
在输出信噪比最大准则下设计一个线性滤波器是具有实际意义的。
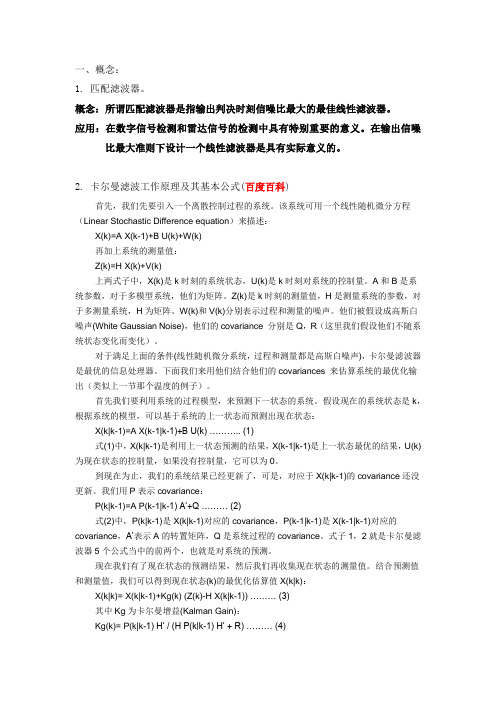
2. 卡尔曼滤波工作原理及其基本公式(百度百科)首先,我们先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:X(k)=A X(k-1)+B U(k)+W(k)再加上系统的测量值:Z(k)=H X(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
A和B是系统参数,对于多模型系统,他们为矩阵。
Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。
他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
下面我们来用他们结合他们的covariances 来估算系统的最优化输出(类似上一节那个温度的例子)。
首先我们要利用系统的过程模型,来预测下一状态的系统。
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:X(k|k-1)=A X(k-1|k-1)+B U(k) (1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance还没更新。
我们用P表示covariance:P(k|k-1)=A P(k-1|k-1) A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。
信号检测与估计理论(复习题解)-精选文档

a ba 0 图 2. 1 (b)
ab y
2 b y x
2 2 y 4 x
第2章 信号检测与估计理论的基础知识 例题解答
例 2 . 3 设连续随机信号 x ( t ) a cos( t ), 其振幅 a 和频率 已知 相位 在 [ , ) 范围内均匀分布。分析 该信号的广义平稳 并求其自 差函数 。 解 : 分析该信号是否满足广 义平稳的条件。 信号的均值 ( t ) E a cos( t ) a cos( t ) p ( ) d x
2 1 ( y b ) / 2 1 x p ( y ) exp 2 2 2 2 2 x x 1 2
2 1 y ( 2 b ) x exp 2 2 8 8 x x 1 2
二. 离散随机信号矢量
1. 概率密度函数描述 。 2. 统计平均量:均值矢量 , 协方差, 协方差矩阵。 3. 各分量之间的互不相关 性和相互统计独立性及 关系。 4. 高斯离散随机信号矢量 的概率密度函数及特 点: x ~ N ( μ , C ), 互不相关等价于相互统 计独立 , 独立同分布 x x
E ( x b ) b
y
2 y
2 2 22 E ( y b ) E ( x b b ) E ( x 0 ) a / 6
第2章 信号检测与估计理论的基础知识 例题解答
当 a b 2 a 时, p ( y ) 的函数曲线如图 2 . 1 (b)所示 。 p ( x) p( y ) 1/ a 1/ a
第 1章
信号检测与估计概论
信号检测与估计试题及答案
(1). 若 为常数,求 的最大似然估计。
ˆ 1 N ln xiБайду номын сангаасN i 1
(2). 判断 的最大似然估计是否是有效估计? 因为
ˆ HX B ,其中 H C M N , B C M 1
(1). 用最小均方误差准则确定矩阵 H , B 。 (用 , x 的一阶和二阶统计量表 示。 )
H cov( , x ) cov1 ( x , x ) B E ( ) cov( , x ) cov 1 ( x , x ) E ( x)
2 ) ,做 H1 判决,反之做 H 0 判决。 ln 2 3
2
4. 求解下列问题 (1). 什么是序贯检测?
A1 , D1 ( x) A0 , D0 other , more obervation
(2). 对二元检测 P D1 H 0 , P D0 H1 若,推导瓦尔特序贯检测的门
1 (2). 若是线性调频信号, 即 s1 (t ) A1 cos(1t t 2 ) 0 t T , 2 / 1 T , 2
是常数,再求 Pe 结果相同。
3. 设有两种假设分别为:
H 0 : P0 ( x)
x2 1 exp 2 2 2 1 x A, A 0 H1 : P 1 ( x) 2 A 0 x >A
(2). ˆ 是否无偏
是无偏估计。
7. 求解下列问题。 (1). 什么是卡尔曼滤波,写出卡尔曼滤波的状态方程,观测方程和滤波方程
信号检测与估计理论简答
信号检测与估计理论简答题1.维纳滤波器与卡尔曼滤波器的区别维纳滤波器:1)只用于平稳随机过程。
2)该系统常称为最佳线性滤波器。
它根据全部过去和当前的观测信号来估计信号的波形,它的解是以均方误差最小条件所得到的系统的传递函数H(Z)的形式给出的。
3)信号和噪声是用相关函数表示的。
卡尔曼滤波器:1)平稳随机过程和不平稳随机过程均适用。
2)该系统常称为线性最优滤波器。
它不需要全部过去的观测数据,可根据前一个的估计值和最近的观察数据来估计信号的当前值,它是用状态方程和递推方法进行估计的,其解是以估计的形式给出的。
3)信号和噪声是用状态方程和测量方程表示的。
2.解释白噪声情况下正交函数集的任意性设)0)(()()(T t t n t s t x ≤≤+=中,噪声n(t)是零均值、功率谱密度为2/)(0N w P n =的白噪声,其自相关函数)(2)(0u t N u t r n -=-δ。
于是,任意取正交函数集)()},({t x t f k 的展开系数jx 和kx (k=1,2,…)的协方差为)])([(k k j j s x s x E --])()()()([00⎰⎰=Tk j Tdu u f u n dt t f t n E⎰⎰⎥⎦⎤⎢⎣⎡=T Tk j dt du u f u n t n E t f 00)()]()([)(⎰⎰⎥⎦⎤⎢⎣⎡-=TT k j dt du u f u t t f N 000)()()(2δjk k Tj N dt t f t f Nδ2)()(2==⎰当k j ≠时,协方差0)])([(=--k k j j s x s x E ,这说明,在n(t)是白噪声的条件下,取任意正交函数集)}({t f k 对平稳随机过程k x (k=1,2,…)之间都是互不相关的。
这就是白噪声条件下正交函数集的任意性。
3.请说明非随机参量的任意无偏估计量的克拉美-罗不等式去等号成立的条件和用途克拉美-罗不等式])),(ln [(1])ˆ[(22θθθθ∂∂≥-x p E E 或)]),(ln [(1])ˆ[(222θθθθ∂∂-≥-x p E E 当且仅当对所有的x 和θ都满足k x p )ˆ(),(ln θθθθ-=∂∂时,不等式去等号成立。
【精选资料】信号检测与估计总复习
《信号检测与估计》总复习
第一章 绪 论
本章提要
本章简要介绍了信号检测与估计理论的地位作用、研究对象和发展历程,以及本课程的性能和主要内容等。
第二章 随机信号及其统计描述 本章提要
本章简要阐述了随机过程的基本概念、统计描述方法,介绍了高斯噪声和白噪声及其统计特性。
本章小结
(1)概率分布函数是描述随机过程统计特性的一个重要参数,既适用于离散随机过程,也适用于连续随机过程。
一维概率分布函数具有如下性质
1),(0≤≤t x F X ;
[]0)(),(=-∞<=-∞t X P t F X ;
[]1)(),(=+∞<=+∞t X P t F X ;
),(),())((1221t x F t x F x t X x P X X -=<≤;
若21x x <,则),(),(12t x F t x F X X ≥
概率密度函数可以直接给出随机变量取各个可能值的概率大小,仅适用于连续随机变量。
一维概率密度具有如下性质:
0),(≥t x f X ;
1
),(=⎰
+∞
∞
-dx t x f X ;
x d t x f t x F x X X '
'=⎰
∞
-),(),(;
[]⎰=-=<≤21
),(),(),()(1221x x X X X dx
t x f t x F t x F x t X x P。
《信号检测与估计》第四章习题解答
(3sinω0T
−
2sin3ω0T
)
则判决规则变为
H1
I
> <
β
H0
两种错误判决的概率分别为
+∞
∫ P(D1 | H0 ) = β f (I | H0 )dI
《信号检测与估计》习题解答
β
∫ P(D0 | H1) = −∞ f (I | H1)dI
平均错误概率 Pe 为
∫ ∫ Pe
= P(H0 )P(D1 | H0 ) + P(H1)P(D0
T 0
[x(t
)−
B
cos(ω2t
+φ
)]2
dt
《信号检测与估计》习题解答
( ) ( ) ( ) f xH0 =
1
∫ − 1
e N0
T 0
[x
(t
)−
s
0
(t
)]2
dt
=
2π σ k
1
∫ − 1
e N0
T 0
[x
(t
)−
A
cos
ω1t
−
B
cos(ω
2
t
+φ
)]2
dt
2π σ k
根据最小差错概率准则有
0 N0
T 2 s2(τ )dτ = 2a2T
0 N0
N0
输出信号
xo (T
)
=
T
∫0
h(t )x(T
−
t )dt
=
∫Ts(T 0
− t)x(T
−
t )dt
=
T
∫0
2 N0
s(τ
)x(τ
《信号检测与估计》第二章习题解答

E[x]
=
0
,
R(t, t
+τ
)
=
R(τ
)
=
a2 2
cos ω0τ
即数学期望与时间无关,自相关函数仅与时间间隔有关,故 X (t) 为广义平稳随机过程
2.7 设有状态连续,时间离散的随机过程 X (t) = sin(2πAt),式中, t 只能取正整数,即 t = 1,2,3,L ,
A 为在区间 (0,1) 上均匀分布的随机变量,试讨论 X (t)的平稳性。
cos
t2
+
1 9
sin
t2
cos t1
=
1 9
+
1 9
sin
t1
+
1 9
cos
t1
+
1 9
sin
t2
+
1 9
cos t2
+
1 9
cos(t1
-
t2
)+
1 9
sin(t1
+
t2
)
2.4 随机过程 X (t)为 X (t) = A cosω0t + B sin ω0t
[ ] [ ] 式中,ω0 是常数,A 和 B 是两个相互独立的高斯随机变量,而且 E[A] = E[B] = 0 ,E A2 = E B2 = σ 2 。
1 ↔ e−aτ u(τ )
jω + a
所以
RX (τ ) = ⎜⎜⎝⎛
1 e− 3
3τ −
1e 3
3τ + 1 e− 22
2τ − 1 e 22
2τ ⎟⎟⎠⎞u(τ )
平均功率
信号检测与估计理论

第2章 信号检测与估计理论的基础知识 内容提要
三. 离散随机信号的函数
1.一维雅可比特变别换是, 简单线性 的函 变数 。 换时 2. N维雅可比变换。
四. 连续随机信号
1任 .tk 时 意刻采 x (tk) 样 (x k ; tk)所 k ( 1 ,2 , 得 ,N )的 样 概 本 率 函数描述。
平均似然 广 比 义 检 似 验 然 ,比-检 皮验 尔和 逊奈 检曼 验的基
和方法。
第3章 信号状态的统计检测理论 例题解答
例3.1 设二元信号检测的模信型号为
H 0: x1n H1: x2n
其中 观,测n噪 服声 从对称三 如3 角 图 .1(a)分 所布 。 示,
若似然 1 ,求 比最 检 图 佳 测 示 判 门 计 判 P ( 决 H 限 算 1|H 0 决 )。 式域
也相互统计独立。
七. 信号模型及统计特性
确知信号 (未和 )知 参随 量机 ; 信 随号 机参量信性 号描 的述 统
第2章 信号检测与估计理论的基础知识 例题解答
例 2.1设离散x随 服机 从信 对号 称 其 三 概 角 率 分 密 布 度 , 函
p(x)
11|x| a a2
axa (a0)
0
其他
第3章 信号状态的统计检测理论 内容提要
一.信号状态统计检测 的理 基论 本概念
信号状态观 的测 假信 设号 , 的数 概合 ,率理 密判 判 度决 决 函,结果 与判决概最 率佳 , 判决的概 。念
二.二元信号状态统计 的检 三测 个准则
贝叶斯最 检小 测平 准均 则准 错 , 奈 则 误 曼 , 皮 概尔 率逊 检 测准则的概 检 念 验 、 判 似 决 然 为 式 比 最 、简 化判 简决 能 式
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
差函数。
解:分析该信号是否满足广义平稳的条件。
信号的均值
x
(t
)
Ea
cos(t
)
a
cos(t
)
p(
)d
a
2
cos(t
)d
0
信号的自相关函数 rx (t j ,tk ) E a cos(t j )a cos(tk )
a2
cos(t
j
) cos(tk
)p( )d
a2
4
[cos(t
j
tk
2 )
三.高斯有色噪声中确知信号波形的检测
高斯信号。若任意tk时刻采样的样本为x(tk ) (xk;tk )(k 1,2, ,N ),求 样本矢量x (x1 x2 xN )T的N维联合概率密度函数。
解:样本矢量x (x1 x2 xN )T 是N维高斯离散随机信号矢量。
xk 0 k 1,2, , N
cx ( ) rx ( ) (N0 / 2) ( )
概率密度函数。
第2章 信号检测与估计理论的基础知识 内容提要
五. 线性时不变系统对平稳连续随机信号的响应
1. 输入平稳连续随机信号x(t),响应y(t)也是平稳的。
2. 响应y(t)均值 y H (0)x,自相关函数ry ( ) h( ) h( ) rx ( ), 功率谱密度Py () | H () |2 Px ()。
六.噪声模型及统计特性
高斯噪声、白噪声和高斯白噪声的定义、描述和特性。
高斯噪声:x
~
N(x
,
2 x
);x
~
N( μx
,C x
)
白噪声(零均值):Pn () N0 / 2;cn ( ) rn ( ) N0 / 2 ( )
任意不同时刻采样的样本x(tk )(k 1,2, )之间互不相关。
高斯白噪声(零均值):Pn () N0 / 2;cn ( ) rn ( ) N0 / 2 ( )
cos (t k
tj
)]d
a2
4
cos( )
rx
(
)
所以,连续随机信号x(t)是广义平稳的。
tk t j
第2章 信号检测与估计理论的基础知识 例题解答
因为连续随机信号x(t )的均值为零,所以
cx
(
)
rx
(
)
a2
4
cos( )
tk t j
例2.4 设连续随机信号x(t)是均值为零,功率谱密度Px () N0 / 2的
a x a 其他
(a 0)
如图2.1(a )所示。已知x的均值和方差分别为 x
0,
2 x
a2
/ 6。
设y x b,求p( y)及y的均值和方差;当a b 2a时,画出p( y)的函数
曲线。
解:反函数 x y b, 雅可比 J d( y b) / dy 1, 所以
p(y)
1 1 | yb| a a2 0
例3.2 设二元信号检测的信号模型分别如图3.2(a)、(b)所示。
若似然比检验门限为(0 ),求最佳判决式;当 2时,图示
p(x | H0 )和p(x | H1)及最佳判决域,并标出判决概率P(H 0 | H1)对应的
面积。 p(x | H0 )
p(x | H1) 1
1/ 3
1
0
图3.2(a)
s1k
s0
k
2 n
P(H1 | H0 ) Qln / d d / 2 P(H1 | H1) Qln / d d / 2
Qu0
u0
1
2
1
2
exp
u2 2
du
第4章 信号波形的检测
内容提要
一. 信号波形检测的两个预备知识
1. 匹配滤波器的概念、设计、性质。
2.连续随机信号的正交级数展开:正交函数集的定义;平稳连续随
任意不同时刻采样的样本x(tk )(k 1,2, )之间互不相关,
也相互统计独立。
七. 信号模型及统计特性
确知信号和随机(未知)参量信号;随机参量信号的统计特性描述。
第2章 信号检测与估计理论的基础知识 例题解答
例2.1 设离散随机信号x服从对称三角分布,其概率密度函数为
p(x)
1 1 |x| a a2 0
或 l( x) H1 H0
判决H1成立的域为R1域 判决H 0成立的域为R0域
判决H1成立的域为L1域 判决H 0成立的域为L0域
第3章 信号状态的统计检测理论 内容提要
检测性能分析
通用方法
高斯检验统计量的简化方法
p(l | H0 ) p(l | H1)
P(H1 | H0 ) L1 p(l | H0 )dl P(H1 | H1) L1 p(l | H1)dl
二.二元信号状态统计检测的三个准则
贝叶斯检测准则,最小平均错误概率检测准则,奈曼 皮尔逊检 测准则的概念、似然比检验判决式、化简为最简判决式、检测性能
分析(含通用方法和检验统计量是高斯离散随机信号时的简化方法。)
似然比检验判决式
最简判决式
(x)
p( p(
x x
| |
H H
1 0
) )
H1
H0
l( x) H1 H0
概率准则
判决方式、检测性能分析。
四.随机(未知)参量信号状态的统计检测
平均似然比检验,广义似然比检验和奈曼- 皮尔逊检验的基本概念
和方法。
第3章 信号状态的统计检测理论 例题解答
例3.1 设二元信号检测的信号模型为 H0:x 1 n H1:x 2 n
其中,观测噪声n服从对称三角分布,如图3.1(a)所示。
机信号展开时,为使展开系数互不相关,正交函数集的每个坐标函数应 满足的积分方程;白噪声时正交函数集的任意性。
二.高斯白噪声中确知信号波形的检测
1.简单二元、一般二元信号波形检测的最佳判决式、检测系统结
构、检测性能分析、最佳信号波形设计;充分统计量分析方法基础。
2. M元信号波形的贝叶斯检测准则和最小平均错误概率检测准则的 最佳判决与检测性能分析的基本方法。
信号检测与估计理论
内容提要 例题解答
第1章 信号检测与估计概论 信号的随机性及其统计处理方法。
内容提要
第1章 信号检测与估计概论
略
例题解答
第2章 信号检测与估计理论的基础知识 内容提要
一. 离散随机信号
1. 概率密度函数p(x)及特性: 非负,全域积分等于1,落入[a,b]间的概率。
2. 统计平均量:均值,方差。
d 2 E(l | H1) E(l | H0 ) 2
Var (l | H0 )
N k 1
s2 1k
N
s2 0k k 1
2
N k 1
s1k
s0
k
2
N
2
2
s n
1k
k1
N
s2 0k k 1
2
N k 1
s1k
s0
k
判决概率为
N k 1
s2 1k
N
s2 0k k 1
2
N k 1
H0
,
判
决
假
设H
成
0
立。
第3章 信号状态的统计检测理论 例题解答
当 2时,图示 p(x | H0 )和p(x | H1)及最佳判决域,并标出判决概率
P(H 0 | H1)对应的 面积,如图3.2(c)所示。
p(x | H0)
p(x | H1)
1/ 3
1 1/ 3 0 1/ 3 1
R0 R1
R0
|
H1
)
1
2
2 n
N
2
exp
N
k 1
(xk s1k
2
2 n
)2
第3章 信号状态的统计检测理论 例题解答
由似然比检验判决式 (x) p(x | H1) H1
得
p(x | H0 ) H0
N
exp
xk s1k
2
k1
n
n xk s0k
2
k 1
n
N
s2 1k
22
k 1
n
N2
3.
高斯离散随机信号的概率密度函数及特点:x
~
N(x
,
2 x
)。
二. 离散随机信号矢量
1. 概率密度函数描述。
2. 统计平均量:均值矢量,协方差,协方差矩阵。
3. 各分量之间的互不相关性和相互统计独立性及关系。
4.高斯离散随机信号矢量的概率密度函数及特点:
x ~ N( μx ,C x ), 互不相关等价于相互统计独立, 独立同分布时的 概率密度函数。
ab yab 其他
(a 0)
y E(x b) b
2 y
E( y
b)2
E(x
b b)2
E(x
0)2
a2
/6
第2章 信号检测与估计理论的基础知识 例题解答
当a b 2a时,p( y)的函数曲线如图2.1(b)所示。
p(x) 1/ a
p( y) 1/ a
a0a x a0 a b a2 x
cx ( ) | 0
N0
/
2
样本xk (k 1,2, , N )之间是独立同分布的。所以
p(
x)
1
N0
N
2
exp
N
k 1
x2 k
N0
第3章 信号状态的统计检测理论 内容提要
一. 信号状态统计检测理论的基本概念
信号状态的假设,观测信号的概率密度函数,合理判决,判决结果 与判决概率,最佳判决的概念。