三轴转台内环控制系统【哈工大自动控制原理 大作业】【范本模板】
设计一个3工位旋转工作台的控制系统

任务书课题十二、设计一个3工位旋转工作台的控制系统1.动作特性其工作示意如图所示。
三个工位分别完成上料、钻孔和卸件。
工位1:上料器推进,料到位后退回等待。
工位2:将料夹紧后,钻头向下进给钻孔,下钻到位后退回,退回到位后,工件松开,放松完成后等待。
工位3:卸料器向前将加工完成的工件推出,推出到位后退回,退回到位后等待。
2.控制要求工位2工作台示意图1)用选择开关来决定控制系统的全自动、半自动运行和手动调整方式。
2)手动调整采用按钮点动的控制方式。
3)系统处于半自动工作方式时,每执行完成一个工作循环,用一个起动按钮来控制进入下一次循环。
4)系统处于全自动运行方式时,可实现自动往复地循环执行。
5)系统运动不很复杂,采用4台电机。
6)对于部分与顺序控制和工作循环过程无关的主令部件和控制部件,采用不进入PLC的方法以节省I/O点数。
7)由于点数不多,所以用中小型PLC可以实现。
3.时间安排第1-2天:根据设计任务查阅相关文献;第3-6天:选择一种合适的设计方法,制定详细的设计方案,设计出满足要求的电器控制系统并验证其正确性;第7-8天:编写课程设计报告;绘制相关电气图纸。
第9-10天:提交课程设计报告;进行课程设计答辩。
4.所需提交的材料1)编写输入输出对照表。
包括信号名称、外部元件号、内部继电器号2)绘制PLC外部接线图3)绘制功能流程图;4)编写、调试梯形图或语句表程序目录任务书 ........................................................................ 错误!未定义书签。
第1章课程设计任务说明 ...................................... 错误!未定义书签。
1.1 课题简介........................................................... 错误!未定义书签。
三轴转台内环控制系统【哈工大自动控制原理 大作业】
Harbin Institute of Technology三轴转台内环控制系统课程名称:自动控制原理院系:班级:设计者:学号:设计时间:. 1一、背景描述三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置。
本文研究的主要内容是三轴转台的内环控制系统。
二、问题描述技术要求:最大角速度400/o s ,最大动态踪误差0.02o ss e ≤;频带宽度148c s ω-≥,相位裕度45oγ=。
固有系统传递函数:原题如下:修改后如下:三、求解过程设,为待定的补偿装置传递函数,。
设计要求为0.02oss e ≤令=,则K=2系统开环传递函数如下:E s θ sU s + —G C s G 0 s对数幅频特性方程如下:令,得剪切频率。
相位裕度:由bode图中校正前的图像可知需采用超前补偿的方法,加入校正装置如下:可求得:,得所以校正后的传递函数:校正后的相位裕度:性能要求系统相位裕度为,而校正后的系统相位裕度为,符合要求。
令,得校正后的剪切频率:校正前与校正后的系统bode图如下:四、计算机辅助设计观察系统的单位阶跃相应曲线:五、校正装置电路图电路元件参数为:R2=Ω R3=Ω C1=μF C2=μF六、结论校正后的传递函数:校正后的相位裕度:校正后的剪切频率:七、设计后的心得体会经过本次大作业的设计,我深刻体会到了基础知识的重要性:熟练掌握相关基础知识有利于理解文献和软件的高级操作。
哈工大机械设计大《作业》轴系部件设计完美版
Harbin Institute of Technology课程设计说明书课程名称:机械设计设计题目:轴系部件设计院系:班级:设计者:学号:指导教师:郑德志设计时间:2014年11月哈尔滨工业大学目录一、选择轴的材料 (1)二、初算轴径 (1)三、轴承部件结构设计 (2)3.1轴向固定方式 (2)3.2选择滚动轴承类型 (2)3.3键连接设计 (2)3.4阶梯轴各部分直径确定 (3)3.5阶梯轴各部段长度及跨距的确定 (4)四、轴的受力分析 (5)4.1画轴的受力简图 (5)4.2计算支反力 (5)4.3画弯矩图 (6)4.4画转矩图 (6)五、校核轴的弯扭合成强度 (8)六、轴的安全系数校核计算 (9)七、键的强度校核 (10)八、校核轴承寿命 (11)九、轴上其他零件设计 (12)十、轴承座结构设计 (12)十一、轴承端盖(透盖) (13)参考文献 (13)一、 选择轴的材料通过已知条件和查阅相关的设计手册得知,该传动机所传递的功率属于中小型功率。
因此轴所承受的扭矩不大。
故选45号钢,并进行调质处理。
二、 初算轴径对于转轴,按扭转强度初算直径:d ≥√9.55×106P n10.2[τ]=C √P n13式中 d ——轴的直径;P ——轴传递的功率,kW ;n1——轴的转速,r/min;[τ]——许用扭转剪应力,MPa; C ——由许用扭转剪应力确定的系数;由大作业四知P =3.802kw所以:d ≥36.99mm本方案中,轴颈上有一个键槽,应将轴径增大5%,即d ≥36.99×(1+5%)=38.84mm按照GB2822-2005的a R 20系列圆整,取d =40 mm 。
根据GB/T1096—1990,键的公称尺寸b ×h =12×8,轮毂上键槽的尺寸 b=12mm ,1t =3.3mm 3、设计轴的结构3.1轴承机构及轴向固定方式因传递功率小,齿轮减速器效率高、发热小,估计轴不会长,故轴承部件的固定方式采用两端固定方式。
哈工大自动控制原理大作业
Harbin Institute of Technology自动控制原理设计论文课程名称:自动控制原理设计题目:液压伺服系统校正院系:测控技术与仪器系班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学自动控制原理大作业一、 设计任务书考虑图中所示的系统。
要求设计一个校正装置,使得稳态速度误差常数为-14秒,相位裕度为,幅值裕度大于或等于8分贝。
利用MATLAB 画出已校正系统的单位阶跃响应和单位斜坡响应曲线。
二、 设计过程1、 人工设计1)、数据计算由图可知,校正前的开环传递函数为:0222s+0.10.025(20s 1)G =0.1(s 0.14)(1)44s s s s s +=++++ 其中按频率由小到大分别含有积分环节和放大环节,-20dB/dec ;一阶微分环节,10.05/w rad s =,0dB/dec;振荡环节,22/w rad s =,-40dB/dec;稳态速度误差:0202s+0.1e ()lim (s)lim 0.025(s 0.14)ss s s sG ss s →→∞===++。
显然,此时的相位裕度和稳态速度误差都不满足要求。
为满足题目要求,可以引入超前校正,提高系统的相位裕度和稳态速度误差。
2)、校正装置传递函数 (1)、稳态速度误差常数的确定为使稳态速度误差常数为-14秒,设加入的开环放大倍数为k,加入校正装置后的稳态速度误差满足: 11e ()4k 0.025kss v ∞=== 解得K=160;将K=160带入,对应的传递函数为:0222s+0.14(20s 1)G (s)=1600.1(s 0.14)(1)44s s s s s +=++++ 则校正前(加入k=160的放大倍数后)幅值穿越频率:018.00/c w rad s =,相位裕度:o 00.1631c r =; (2)、校正装置的确定这里采用超前补偿,由前面算得k=160,故设加入的校正装置传递函数为:111G (s)T 1c aT s s +=+ 设计后要求o =50γ,则o 0-=500.163149.8369o o γγ-=;a 满足:01sin 49.83691a a -=+ 解得:a =7.33,取a =8.取1010/18.00/c w rad s w rad s =<=作为第一个转折频率,取第二个转折频率为21*80/w a w rad s ==;在伯德图上过3rad/s 处做斜率为-20dB/dec 的线。
三轴转台控制系统设计--优秀毕业论文

硕士学位论文三轴转台控制系统设计CONTROL SYSTEM DESIGN OF THREE-AXIS TURNTABLE陈丽娟哈尔滨工业大学2010年6月国内图书分类号:TP273.2 学校代码:10213 国际图书分类号:681.5 密级:公开硕士学位论文三轴转台控制系统设计硕士研究生:陈丽娟导师:伞冶教授申 请 学 位:工学硕士学科、专业:控制科学与工程所在单位:信息科学与工程学院答辩日期:2010年6月授予学位单位:哈尔滨工业大学Classified Index:TP273.2 School Number: 10213 U.D.C:681.5 Security: OpenDissertation for the Master Degree in EngineeringCONTROL SYSTEM DESIGN OFTHREE-AXIS TURNTABLECandidate: Chen LijuanSupervisor:Prof. San YeAcademic Degree Applied for:Master of Engineering Specialty: Control Science and Engineering Affiliation: School of Information Scienceand EngineeringDate of Defence:June, 2010Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘 要三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置。
本文中,我们研究的主要内容为三轴转台。
本文以实际工程项目为背景,主要研究三轴转台的控制系统设计。
随着武器系统精度的不断提高,对其测试装置的要求也越来越高。
论文首先简要阐述了国内外三轴转台的研究现状,并简要总结了我国转台的发展方向、各类控制方法在该领域的应用情况以及转台控制系统存在的主要问题。
自01-哈工大机械原理大作业任务书-连杆机构参考模板
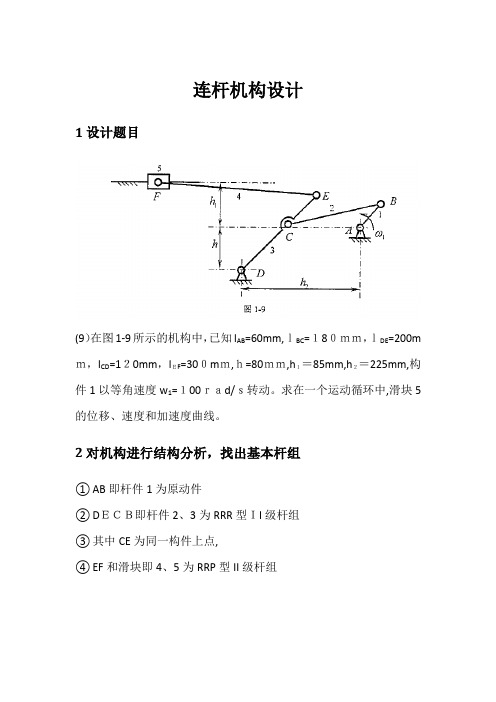
连杆机构设计1设计题目(9)在图1-9所示的机构中,已知l AB=60mm,lBC=180mm,lDE=200m m,l CD=120mm,lEF=300mm,h=80mm,h1=85mm,h2=225mm,构件1以等角速度w1=100rad/s转动。
求在一个运动循环中,滑块5的位移、速度和加速度曲线。
2对机构进行结构分析,找出基本杆组①AB即杆件1为原动件②DECB即杆件2、3为RRR型II级杆组③其中CE为同一构件上点,④EF和滑块即4、5为RRP型II级杆组3各基本杆组的运动分析数学模型② RRR 杆组运动分析的数学模型1.位置分析设两个构件长度1R ,2R 及外运动副1N ,2N 的位置已知,求两个构件的位置角1θ,2θ及内运动副3N 的位置。
选定坐标系及相应的标号如下图,构件的位置角i θ约定从响应构件的外运动副i N 引x 轴的方向线,按逆时针量取。
设外运动副1N ,2N 的位置坐标分别为1N (1x P ,1y P ),2N (2x P ,2y P ),则 12221212[( -)( -)]x x y y d P P P P =+ 222121cos ()/(2 )d R R R d α=++ 212 1arctan(( )/( )y y x x P P P P ϕ=-- 1θϕα=±内运动副3N 点坐标为:3111 cos x x P P R θ=+3111 sin y y P P R θ=+构件2K 的位置角:23232arctan[()/( )]y y x x P P P P θ=--位置分析过程中应注意两个问题:(1) 因为1N ,2N 的位置及杆长1R ,2R 都是给定的,这就可能出现d >12R R +或12d R R <-的情况。
在这两种情况下实际上不可能形成RRR 杆组,计算过程中应及时验算上述条件,如满足上述条件应中止运算并给出相应信息。
(2)在给定1N ,2N ,1R ,2R 的条件下,3N 可能有两个位置如上图中的3N 和3N ',相应的1θϕα=+和1θϕα'=-,我们称为杆组的两种工作状态。
哈工大自动控制原理06自控试题及答案
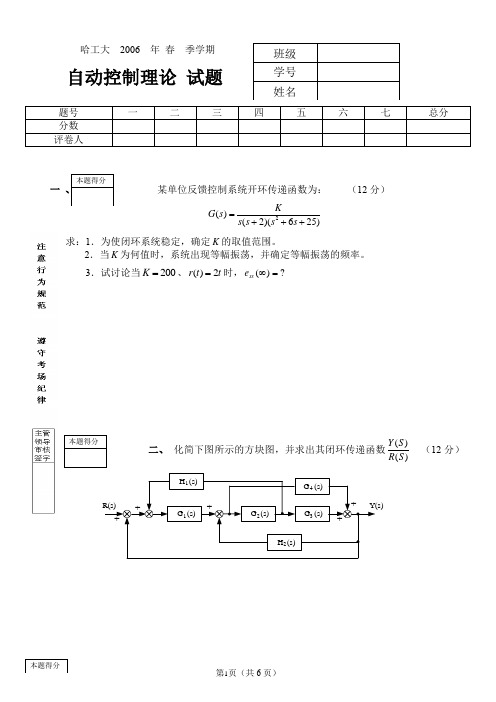
第1页(共6页)哈工大 2006 年 春 季学期自动控制理论 试题一某单位反馈控制系统开环传递函数为: (12分)2()(2)(625)KG s s s s s =+++ 求:1.为使闭环系统稳定,确定K 的取值范围。
2.当K 为何值时,系统出现等幅振荡,并确定等幅振荡的频率。
3.试讨论当200K =、()2r t t =时,?)(=∞ss e二、 化简下图所示的方块图,并求出其闭环传递函数)()(S R S Y (12分)三、系统结构图如下: (12分)求:1、当)(1)(t t r =时,系统的超调量?P σ=,及调节时间?s t =(02.0=∆),2、当输入信号分别为)(1)(t t r =;()r t t =;21()2r t t =时,其()?ss e ∞=四、系统结构图如下:(12分)求:1)试绘出以T 为变量的根轨迹的大致图形。
(如有渐近线;分离点、会合点;出射角、入射角;与虚轴的交点等问题应计算之)2)为使系统稳定,T 的取值范围。
3)系统临界稳定时T 的数值,并指出临界稳定时的振荡频率。
第3页(共6页)技术指标要求:相角稳定裕量:050≥γ;剪切频率:13≥C ω秒-1,=200V K 秒-1,试求?)(=s G C (注:系统的固有特性、校正特性及校正后的特性均应画在给出的对数坐标纸上。
)六、某非线性系统的结构图如下: (8分)-)2)(1(++s s s K)(t r )(t x )(t y )(t C ka其中:1=a ,1k =;试确定系统处于临界稳定状态时,线性部分的?=K 及振荡频率?=ω (提示:死区非线性的描述函数 122()[1(sin 1())]a a a N X k X X Xπ-=-+-) 本题得分第5页(共6页)七、回答下列各问: (12分)1.在下述图中,各控制系统的开环幅相频率特性如图所示,P 为各开环传递函数在s 平面右半部的极点数,试判断各闭环系统的稳定性(如不稳定需指出有几个不稳定的根)。
哈工大机电控制系统大作业一
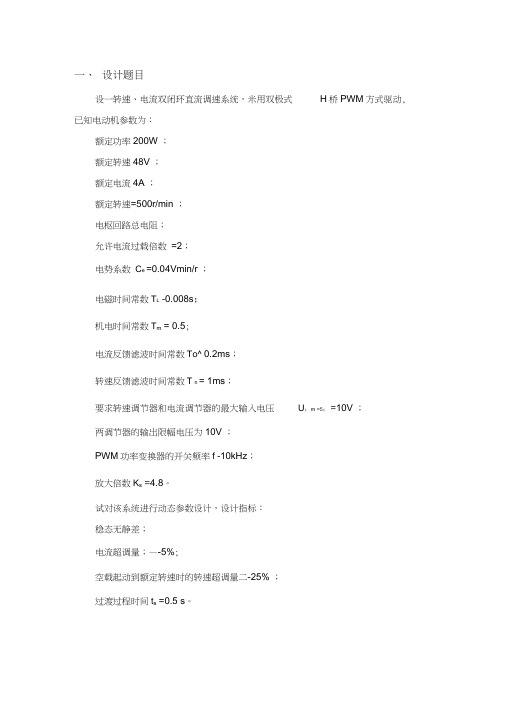
设一转速、电流双闭环直流调速系统,米用双极式H桥PWM方式驱动, 已知电动机参数为:额定功率200W ;额定转速48V ;额定电流4A ;额定转速=500r/min ;电枢回路总电阻;允许电流过载倍数=2;电势系数C e =0.04Vmin/r ;电磁时间常数T L-0.008s;机电时间常数T m= 0.5;电流反馈滤波时间常数To^ 0.2ms;转速反馈滤波时间常数T°n = 1ms;要求转速调节器和电流调节器的最大输入电压U;m =5;=10V ;两调节器的输出限幅电压为10V ;PWM功率变换器的开关频率f -10kHz;放大倍数K s=4.8。
试对该系统进行动态参数设计,设计指标:稳态无静差;电流超调量;—-5%;空载起动到额定转速时的转速超调量二-25% ;过渡过程时间t s=0.5 s。
1.计算电流和转速反馈系数电流反馈系数:U10 = 1.25(V/A )'Inom2 4转速反馈系数:*U nmCi —-10 0.02(V min /r)nn om5002.电流环的设计(1)确定时间常数电流反馈滤波时间常数T °i = 0.2ms =0.0002s ,11调制周期 T s=——0.0001s ,f 10x1000按电流环小时间常数的近似处理方法,取T 沪 T s T °i =0.0001 0.0002 = 0.0003s(2) 选择电流调节器结构电流环可按I 型系统进行设计。
电流调节器选用PI 调节器,其传递函数为皿+1 G ACR (s)二 K iNS(3) 选择调节器参数超前时间常数:j =T = 0.008s 。
电流环按超调量6^5%考虑,电流环开环增益:取 K,^^0.5,因此0.50.5K ,1666.6667Tj 0.0003于是,电流调节器的比例系数为0.008乂 8 K i = K } -1666.6667 17.7778K s1.25 4.8(4) 检验近似条件电流环的截止频率•〔= K| =1666.6667 1/s现在,3333.3333 • 1666.6667 =•⑺,满足近似条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology
三轴转台内环控制系统
课程名称:自动控制原理
院系:
班级:
设计者:
学号:
设计时间:2016。
1。
1
哈尔滨工业大学
哈尔滨工业大学
一、
背景描述
三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置.本文研究的主要内容是三轴转台的内环控制系统。
二、
问题描述
技术要求:最大角速度400/o s ,最大动态踪误差0.02o ss e ≤;频带宽度
1
48c s ω-≥,相位裕度
45o
γ=。
固有系统传递函数: 原题如下
:
修改后如下
:
三、
求解过程
设,为待定的补偿装置传递函
数,。
设计要求为0.02o
ss e ≤
令0。
02=,则K=2
系统开环传递函数如下:
E s θ s
U s + —
G C s G 0 s
对数幅频特性方程如下:
令,得剪切频率。
相位裕度:
由bode图中校正前的图像可知需采用超前补偿的方法,加入校正装置如下:
可求得:
,得
哈尔滨工业大学
所以
校正后的传递函数:
校正后的相位裕度:
性能要求系统相位裕度为,而校正后的系统相位裕度为,符合要求. 令,得校正后的剪切频率:
:
校正前与校正后的系统bode图如下
哈尔滨工业大学
四、计算机辅助设计
观察系统的单位阶跃相应曲线:
哈尔滨工业大学
五、校正装置电路图
电路元件参数为:R2=1.3kΩ R3=6.0kΩ C1=28.1μF C2=12.8μF
六、结论
校正后的传递函数:
哈尔滨工业大学
校正后的相位裕度:
:
校正后的剪切频率
七、设计后的心得体会
经过本次大作业的设计,我深刻体会到了基础知识的重要性:熟练掌握相关基础知识有利于理解文献和软件的高级操作.
哈尔滨工业大学。