雷达波形设计及抗主瓣有源干扰若干技术研究
干扰条件下弹载认知雷达波形优化研究
干扰条件下弹载认知雷达波形优化研究作者:鹿玉泽郑家毅李伟蒋孟燃来源:《航空兵器》2017年第05期摘要:现代战场电磁环境日趋复杂,末端主动制导阶段弹载雷达常受到噪声、杂波和干扰影响从而导致弹载雷达的目标检测、识别及跟踪性能下降。
现有弹载雷达波形较为固定,没有根据战场环境改变自身参数的能力,严重制约导弹制导精度。
针对电子战环境中的弹载雷达波型设计问题,在分析影响弹载雷达性能因素基础上,分析了弹载雷达常用信号,给出了三种干扰条件下弹载雷达波形设计方法。
最后探讨了目前弹载雷达波形设计存在的问题及今后的研究方向。
关键词:干扰;弹载雷达;认知雷达;波形优化中图分类号: TJ765.3+31; TN95文献标识码: A文章编号: 1673-5048(2017)05-0037-080引言弹载雷达,又称主动雷达导引头、无线电寻的器[1],是导弹制导系统的关键设备。
弹载雷达通过分析回波提取目标参数和环境信息,实现对目标的探测、定位和识别。
但除目标回波外,弹载雷达还会接收到一些不利于其功能的信号,如噪声、杂波和干扰,这其中以干扰对弹载雷达的影响尤为突出。
现代隐身技术使目标RCS越来越小,更易淹没于背景杂波中,这些因素的出现使弹载雷达面临严峻挑战。
2006年, Simon Haykin教授正式提出了认知雷达的概念,并指出认知雷达具有感知环境、理解环境、学习、推理并判断决策的能力。
利用认知的概念来提高弹载雷达适应现代战场环境的能力已成为近年来研究的热点,其主要技术途径便是对弹载雷达波形的优化设计。
本文总结了当前弹载雷达常用信号形式,在充分考虑影响雷达性能因素的条件下,从设计弹载雷达发射波形入手抑制噪声和杂波,降低干扰和噪声影响,提升弹载雷达对目标的检测、识别和跟踪等各项性能。
1影响弹载雷达性能的因素分析弹载雷达搜索截获目标后,需要对目标进行跟踪与锁定,在此阶段削弱雷达检测及跟踪性能的因素主要有噪声、杂波和干扰。
1.1噪声、杂波特性分析对于雷达寻的制导系统,噪声可分为接收机噪声和目标噪声。
相控阵雷达抗主瓣干扰技术综述

舰船电子对抗SHIPBOARD ELECTRONIC COUNTERMEASUREDec.2019 Vol.42No#2019年12月第&2卷第6期相控阵雷达抗主瓣干扰技术综述王志刚,朱灿,刁志龙,洪畅(中国船舶重工集团公司第七二四研究所,江苏南京211106$摘要:为提高掩护战斗机与导弹突防的干扰有效性,主瓣干扰将逐步成为未来战争中电子战装备的优先选择,远距离支援式主瓣干扰、随队式主瓣干扰和机载弹载自卫式干扰是未来海战环境中大中型水面舰艇预警探测雷达常态化面临的主要干扰场景%当干扰来自天线主瓣或近主瓣区域时,现有抗副瓣干扰技术基本失效,现役技术状态不具备有效的对抗措施,严重制约了舰载主战雷达的实战性能%从雷达抗干扰能动性角度系统地梳理了现有抗主瓣干扰方法,主要包括主动对抗和被动抑制两方面,着重介绍了单装抗干扰代表性成果及其最新进展,分析了相应算法实现思路及存在的问题%关键词:抗主瓣干扰;主动对抗;被动抑制中图分类号:TN974文献标识码:A文章编号:CN32-1413(2019)06-0013-06D01:10.16426/ki.jcdzclk.2019.06.004Summarization of Anti-mainlobe-j amming Technology of Phased-array Radar WANG Zhi-gang,ZHU CanJDIAO Zh—ong,HONG Chang(No.724Research Institute of CSIC,Nanjing211106,China)Abstract:For raising the jamming effectiveness for shielding the defense penetration of fighter and missile,the mainlobe jamming will become the prior selection of electronic warfare(EW)equipment in the future war step by step.Remote support mainlobe jamming,escort mainlobe jamming and airborne/missile-borne self-defense jamming are main jamming scenes which early warning and detection radar of large and medium-sized surface ships faces normally in the future sea war environment.When the jamming comes from antenna mainlobe or near mainlobe scope,current antisidelobe-jamming technology wi l almost lose e f iciency,and active duty technology status has no e f ectivecountermeasure,whichseriouslylimitstheactualcombatperformanceofmainshipborne radar.This paper describes current anti-mainlobe-jamming methods from the aspect of radar antijammingactivity,which mainlycontainsactiveantagonism andpassivesuppression,emphatica l y introduces typical achievement oPsingle anti-jamming and the up-to-date development,analyzes correponding algorithm realization idea and existing problem.Key words:anti-mainlobe-jamming;active antagonism;passive suppression0引言根据国家海洋战略发展趋势,围绕海洋权益的斗争日益激烈,我国海洋国土面临的安全形势日益复杂%东海、南海等海域已成为我军目前最重要的海上战场,同时我军水面舰艇的活动区域也随着海军“大洋存在、两极拓展”发展战略的稳步推进而不断延伸%随着近几年南海和东海部分岛礁维权斗争形势的不断升级,海军舰载雷达装备作战使用方式也发生了明显变化,军事斗争准备和常态化的非军事运用对雷达装备在复杂海况和地理环境下的不间断警戒探测能力提出了越来越高的要求%与此同时,从信息对抗的发展态势来看,海战场各种有意、无意的干扰源数量越来越多,干扰功率越来越大,干收稿日期:2019-08-2114舰船电子对抗第42卷扰手段越来越精细,干扰作战样式越来越灵活,对舰载雷达装备在复杂电磁环境下的抗干扰能力提出了前所未有的高要求%本质而言,雷达对抗的过程既是技术对抗也是战术对抗(12)。
基于盲源分离的抗主瓣干扰技术研究
0引言随着雷达探测应用场景的拓展,各类电磁干扰与自然环境杂波干扰大量涌入,破坏雷达对目标信号的检测与识别,因此要求雷达具有灵活的分辨能力和抗干扰能力。
为了解决复杂电磁环境下的干扰全渗透问题,雷达采用了频率捷变、副瓣对消、副瓣匿影等抗干扰手段,用以解决副瓣干扰,而当干扰从雷达天线主瓣进入时,雷达接收机噪声水平增大,信噪比降低。
利用和差波束的主瓣对消可以抑制近主瓣干扰,但需要将天线主波束对准目标,这在干扰环境下很难实现。
通过对脉冲宽度和强度进行判别的窄脉冲剔除,针对密集假目标这类欺骗式干扰效果明显。
但是,面对非合作目标周边存在的伴随式干扰,雷达将无法跟踪和识别主目标,从而严重影响雷达识别目标的能力。
盲源分离是上世纪八十年代发展起来的一种信号处理技术,原指在缺乏源信号和信道参数先验知识的情况下,仅凭传感器就能观测、分离独立目标信号。
这一技术在无线通信、语音识别、生物医学和水声信号处理等方面得到了广泛的关注和应用研究,在雷达中也有一定的应用前景。
本文主要研究盲源分离算法在阵列雷达抗主瓣干扰中的应用,利用目标回波信号与干扰信号的角度微小差异,实现从多个通道接收的混合信号中分离出干扰和目标,切实提升雷达检测性能。
1信号模型盲源分离需要利用多个通道接收目标回波和干扰的混合信号,可以将雷达阵列接收信号表示为:X=AS+N (1)其中X ∈C m ×n 为接收信号矩阵,A ∈C m ×p 为未知混合矩阵,S ∈C p ×n 为源信号矩阵,N ∈C m ×n 为通道噪声,m 为通道数,n 为信号长度,p 为信号数,各信号在时域和频域均重叠。
盲源分离算法不要求主波束的最大点指向目标或干扰方向,只要目标和干扰方向存在差异即可,其主要原理就是从接收到的未知混合信号中求解到分离矩阵B ,使得Y=BX ,其中Y 近似于源信号S ,从而实现信号的识别与分离。
值得注意的是,进行盲源分离通常存在以下约束条件:①通道数m 不少于信号数p ;②源信号之间相互统计独立;③源信号各矢量均值为0,至多有一个是高斯信号。
雷达抗干扰波形设计和仿真

雷达抗干扰波形设计和仿真引言雷达系统在现代战争和民用领域中起着至关重要的作用。
然而,随着电磁环境的复杂化,雷达面临越来越严峻的干扰问题,因此,设计抗干扰波形成为当前雷达研究的热点之一。
本文旨在探讨雷达抗干扰波形设计和仿真的相关内容,通过分析和研究,提出有效的解决方案。
抗干扰波形设计的背景和意义1. 抗干扰波形设计的背景在雷达系统中,对于目标信号和干扰信号存在干扰的问题已经引起了广泛的关注。
传统的波形设计方法已经不能很好地满足当前复杂电磁环境下的需求。
因此,抗干扰波形设计成为近年来雷达研究的重要方向。
2. 抗干扰波形设计的意义抗干扰波形设计的目标是提高雷达系统对目标信号的探测性能,降低干扰对雷达系统的影响。
通过设计合适的波形,可以增强雷达系统对目标信号的敏感度,降低对干扰信号的敏感度,最终提高雷达的抗干扰能力。
抗干扰波形设计的基本原理和方法1. 抗干扰波形设计的基本原理抗干扰波形设计的基本原理是在保证雷达系统正常工作的前提下,通过优化波形特性和调整参数,使得目标信号的特征更容易与干扰信号进行区分,从而提高抗干扰性能。
2. 抗干扰波形设计的方法在抗干扰波形设计中,存在多种方法和策略。
以下是几种常见的方法:a. 频率分集技术频率分集技术通过在不同频率上分布目标信号的能量,使得干扰信号的能量在各个频率上不均匀分布,从而实现抗干扰的目的。
b. 脉冲压缩技术脉冲压缩技术通过通过调整脉冲的宽度和形状,使得目标信号在时间域上更集中,从而提高抗干扰性能。
c. 频率编码技术频率编码技术通过将目标信号与干扰信号进行编码,使得干扰信号在解码过程中被剔除,从而实现抗干扰的效果。
d. 相位编码技术相位编码技术通过调整相位参数,使得目标信号在接收端与干扰信号进行相位拼凑,从而实现抗干扰的目的。
抗干扰波形设计的仿真方法和工具1. 抗干扰波形设计的仿真方法抗干扰波形设计的仿真方法主要包括数值仿真和物理仿真两种。
数值仿真方法通过建立数学模型和信号处理算法,使用计算机进行仿真计算,以得到抗干扰波形的性能指标。
相控阵雷达自适应抗主瓣干扰方法研究
相控阵雷达自适应抗主瓣干扰方法研究相控阵雷达自适应抗主瓣干扰方法研究引言:相控阵雷达是一种基于相位调控和线性阵列天线结构的雷达系统。
它具有波束可控性、高可靠性、高分辨率等优点,被广泛应用于雷达探测、目标追踪、目标识别等领域。
然而,相控阵雷达在应用过程中面临着干扰问题,其中主瓣干扰是最为严重的一种干扰形式。
本文旨在研究相控阵雷达自适应抗主瓣干扰方法,以提升其抗干扰能力和性能。
一、相控阵雷达系统框架及主瓣干扰原理相控阵雷达系统由发射部分、接收部分和数据处理部分组成。
其中,发送部分通过控制阵列天线的相位和振幅进行波束形成;接收部分将接收到的信号通过阵列天线接收并进行信号预处理;数据处理部分对接收到的信号进行波束形成、回波信号处理等操作。
相控阵雷达存在的主瓣干扰问题是由于阵列天线的波束特性引起的。
主瓣指的是阵列天线在某个方向上的主要辐射方向,而主瓣干扰是指主瓣内的回波信号覆盖了其他方向的目标信号,从而对雷达系统产生干扰。
主瓣干扰的产生原理主要包括阵列天线的相位误差、阵列天线的振幅误差、目标间距小于波长一半等。
二、自适应波束形成算法为了应对主瓣干扰问题,可以采用自适应波束形成算法来实现主瓣抑制。
自适应波束形成算法通过对接收到的信号进行处理,调整阵列天线的相位和振幅,使得目标信号的波束重心对准目标方向,同时抑制主瓣干扰。
自适应波束形成算法主要包括最小均方误差算法(LMS)、最小方差无偏估计算法(MVU)、递推最小二乘算法(RLS)等。
这些算法通过不断调整权值系数,使得输出信号的功率最小,从而抑制主瓣干扰。
其中,LMS算法计算简单,但收敛速度较慢;MVU算法精确度高,但计算复杂度大;RLS算法抗干扰能力强,但计算量大。
三、自适应抗主瓣干扰方法研究针对相控阵雷达的自适应抗主瓣干扰方法,本文提出了一种基于LMS算法的改进方法。
具体步骤如下:1. 预处理:对接收到的信号进行滤波、放大等预处理操作,以排除噪声和干扰影响。
波形分集阵雷达抗欺骗式干扰方法研究

波形分集阵雷达抗欺骗式干扰方法研究波形分集阵雷达抗欺骗式干扰方法研究摘要:近年来,随着雷达技术的不断发展,欺骗式干扰对雷达的干扰越来越严重。
为了提高雷达的抗干扰能力,波形分集阵雷达逐渐成为研究的热点。
本文通过对现有的波形分集阵雷达抗欺骗式干扰方法进行分析和总结,以期为相关领域的后续研究提供参考依据。
关键词:波形分集阵;雷达;欺骗式干扰;抗干扰能力1. 引言雷达技术作为一种重要的电子系统,在广泛应用于航空、航海、军事等领域的同时,也面临着越来越严峻的干扰和攻击。
欺骗式干扰是一种对雷达系统的攻击手段,常见的欺骗式干扰方式包括虚假目标、干扰信号等。
为了提高雷达系统的抗干扰能力,波形分集阵雷达被广泛研究和应用。
2. 波形分集阵雷达的原理波形分集阵雷达通过多个发射和接收天线单元组成的阵列,能够对一个目标进行多次观测并记录多个接收到的波形。
这种阵列结构能够获得目标的多个观测样本,从而增加雷达系统对目标的识别准确性。
波形分集阵雷达的原理主要包括两个方面:波形分集和阵列处理。
波形分集是指通过发送不同的波形信号,记录不同的接收波形,从而获得目标的多个观测样本。
阵列处理则是对多个接收到的波形进行处理,融合和分析,提高雷达系统对目标的准确性和鲁棒性。
3. 波形分集阵雷达抗欺骗式干扰方法为了提高波形分集阵雷达抗欺骗式干扰能力,研究者们提出了多种方法。
本节将结合实际案例,介绍几种常见的抗欺骗式干扰方法。
3.1 波形选择方法波形选择是指选择不同的波形信号作为发送信号,通过对多个接收波形进行融合处理,提高目标的识别准确性。
例如,在目标距离远、噪声干扰较大的情况下,可以选择较长的脉冲宽度来提高雷达系统的信噪比。
而在目标距离近的情况下,可以选择较短的脉冲宽度以增加目标分辨率。
3.2 观测融合方法观测融合是指将多次观测到的目标波形进行融合处理,得到一个更准确的目标波形。
例如,可以通过最小二乘法对多个接收波形进行优化处理,合并成一个更准确的目标波形。
一种基于原子重构的雷达抗主瓣干扰方法
第34卷第6期2020年12月空军预警学院学报Journal of Air Force Early Warning AcademyV ol.34No.6Dec.2020收稿日期:2020-10-14基金项目:国家自然科学基金资助项目(61501505)作者简介:胡敏(1979-),男,高级工程师,主要从事雷达系统设计、雷达信号处理和雷达抗干扰技术等研究.一种基于原子重构的雷达抗主瓣干扰方法胡敏1,李荣锋1,周必雷2(1.航天南湖电子信息技术股份有限公司,湖北荆州434000;2.空军预警学院,武汉430019)摘要:为提升主瓣干扰下雷达作战效能,提出了一种基于原子重构的雷达抗主瓣干扰方法,可有效抑制主瓣干扰,同时具有较高的目标距离和角度估计精度.首先采用特征投影预处理(EMP)算法抑制主瓣干扰,进而通过波束形成和脉冲压缩估计目标距离,然后利用原子重构法估计目标角度.该方法对雷达阵列结构要求不高,既可适用于线阵,也可适用于面阵.当目标方位角(或俯仰角)等于干扰方位角(或俯仰角)时,该方法仍然能同时有效地估计目标方位角和俯仰角.关键词:雷达;主瓣干扰;抗干扰;原子重构中图分类号:TN911.7文献标识码:A文章编号:2095-5839(2020)06-0402-06抗主瓣干扰是目前雷达界公认的难题,尤其是近主瓣压制干扰,即干扰信号进入雷达主瓣,但与目标方向不一致,两者角度差异较小.为简化表述,以下称“近主瓣压制干扰”为“主瓣干扰”.针对雷达抗干扰问题,自适应数字波束形成[1]适合对抗副瓣干扰,然而在对抗主瓣干扰时存在主波束指向偏移、主瓣畸变等问题;而主瓣干扰对消器[2]是利用差波束作为辅助通道来对消主瓣干扰.上述2种方案无法使雷达进一步作目标角度(DOA)估计.针对主瓣干扰背景下的目标DOA 估计问题,目前较为通用的是和差单脉冲测角法.子阵间约束自适应和差单脉冲测角算法[3]主要思想是对自适应单脉冲曲线进行约束,使其逼近静态值,但在主瓣干扰附近区域的估计精度不够理想;四通道系统及其扩展方法[4-7]基于空域中的方位和俯仰两维正交特性,利用方位(或者俯仰)维的干扰对消不会影响俯仰(或者方位)维的方向图,从而进行有效测角,因此当目标与干扰的某一维度角相同时,势必无法测目标另一维的角度;文献[8-9]所采用的方法利用目标与干扰的极化差异进行干扰抑制,但软、硬件代价较高.盲源分离[10-11]是目前在主瓣干扰对抗方面较新的思想,来源于通信领域,可依据信源之间的非相关性或统计独立性进行信源分离,因此适用于雷达主瓣干扰背景,不足之处是估计目标角度较为困难,尤其是在主瓣压制干扰下暂无有效方法.文献[12-13]所采用的方法在主瓣干扰背景下的目标DOA 估计问题上提出了一些新思路,即基于搭建的空时联合角度字典,采用稀疏恢复方法在空时二维谱上同时分辨目标和主瓣假目标干扰,并利用目标和主瓣假目标干扰在时域上的差异性进行目标鉴别,但是无法应用于主瓣压制干扰对抗.本文针对如何对抗主瓣压制干扰开展研究工作,提出了一种基于原子重构的抗主瓣干扰方法,其中心思想是采用特征投影预处理(EMP)算法在空域平面维上抑制主瓣干扰,并引入原子重构的思想更新重构角度原子库,以补偿特征投影法所带来的目标导向矢量失配量,进而利用正交匹配追踪(OMP)算法同时有效估计目标空域两维角度.1信号模型设N 1、N 2、M 分别为面阵的行数、列数及干扰数,A 为阵列流形矩阵,包含目标和干扰的空间位置信息,s 包含目标与干扰的波形信息,v (n )为高斯白噪声,则阵列接收信号可以表示为x (n )=As +v (n )Î(N 1´N 2)´1(1)式中,s =[s 0(n ) s 1(n ) s M (n )]T ,T 表示转置运算;A =[a 0a 1 a m a M ]Î(N 1´N 2)´(M +1),其元素a m =a (θm ϕm )=a (ϕm )⊗a (θm ),⊗为Kronecker 积,其中a (ϕm )和a (θm )分别为阵列俯仰维和方位维导向矢量,其表达式为a (ϕm )=[1 exp(-j αm ) exp(-j2αm ) exp(-j(N 1-1)αm )]T a (θm )=[1 exp(-j βm ) exp(-j2βm ) exp(-j(N 2-1)βm )]T üýþïïïï(2)DOI:10.3969/j.issn.2095-5839.2020.06.003第6期胡敏,等:一种基于原子重构的雷达抗主瓣干扰方法403式中,αm =2πd sin ϕm /λ,βm =2πd cos θm cos ϕm /λ,其中,d 为阵元间的距离,λ为雷达工作波长.2方法原理及步骤本文所提方法原理框图如图1所示.首先对干扰样本进行特征分解,得到特征投影矩阵,以此抑制主瓣干扰,同时可对其进行空域合成并脉压得到目标距离估计值,并由此截取EMP 数据作为后续DOA 估计训练样本;由于引入EMP 算法导致了目标导向矢量失配,因此需要对目标导向矢量进行补偿,采取的措施为重构角度原子库,进而利用OMP 算法进行目标DOA 估计,最终输出目标距离-角度联合参数估计.图1本文所提方法原理框图2.1基于EMP 算法的主瓣干扰相消干扰加噪声的协方差矩阵可以表示为R j +v =åm =1Mσ2m a m a Hm +σ2v I (3)式中,σ2m 、σ2v 和I 分别表示第m 个干扰能量、噪声能量与单位阵,H 表示转置共轭.设n 1、n p 分别表示起始和终止采样点,p 为样本数.x (n 1:n p )仅包含干扰与噪声数据,所对抗的主瓣干扰类型为噪声压制类干扰,其能量占满了所有距离单元,一般采用远距离采样可以完成.通常R j +v 可以由采样协方差矩阵替代:R j +v =x (n 1:n p )x H (n 1:n p )/p =åm =1Nγm u m u Hm =åm =1Mγm u m u Hm +åm =M +1Nγm u m u Hm =U j Λj U H j +U v Λv U H v (4)式中,γm 和u m Î (N 1´N 2)´1分别为特征值与特征矢量,γ1³γ2³ ³γM ³γM +1³ ³γN ,N 为特征值个数;U j Î(N 1´N 2)´M和U v Î(N 1´N 2)´((N 1´N 2)-M )分别为干扰子空间和噪声子空间,Λj =diag(γ1 γ2 γM ),Λv =diag(γM +1 γM +2 γN ).特征投影矩阵可以表示为B =I -U j (U H j U j )-1U H j =I -U j U H j Î(N 1´N 2)´(N 1´N 2)(5)阵列接收信号x (n )经特征投影预处理后的输出为y EMP (n )=Bx (n )=Ba 0s 0(n )+åm =1MBa m s m (n )+v (n )(6)式中v (n )=Bv (n ).为简化叙述,以环境中存在2个主瓣干扰为例,对式(5)进行分析.此时,特征投影矩阵可以表示为B =I -(u H 1u 1+u H2u 2)(7)因此,Ba 1可以表示为Ba 1=a 1-(u H 1u 1+u H2u 2)a 1=a 1-a 1=0(8)同理,Ba 2=0,即EMP 的干扰抑制原理.同时,式(6)中的Ba 0可以表示为Ba 0=[I -(u H 1u 1+u H2u 2)]a 0¹0(9)因此,式(6)可以重新表示为y EMP (n )=Ba 0s 0(n )+v (n )(10)根据式(10),主瓣干扰已被抑制.另外,通过脉压:y PC (n )=y EMP (n )⊗s 0(n )(11)及空域波束合成后可估计目标距离值:y BF (n )=a H 0y PC (n )=(a H 0Ba 0s 0(n )+a H0v (n ))⊗s 0(n )=[(N -e 1e *1-e 2e *2)s 0(n )]⊗s 0(n )+(a H0v(n ))⊗s 0(n )(12)式中,e 1=a H 0u 1,e 2=a H0u 2,*表示共轭.根据脉压尖峰可以估计得到目标距离值.2.2数据截取为了减小后续稀疏恢复方法的运算量,可以根据目标距离估计值截取一段目标附近距离单元的数据作为后续目标DOA 估计训练样本:y (n )=y PC (n r -n k n r +n k )(13)式中,r 为目标距离估计,n r 表示其对应的样本点,n k 是一个预先设置的小常数.2.3原子重构由式(9)可见,引入EMP 后会导致各阵元之间的目标相位关系发生变化,即目标导向矢量失配,这将直接影响后续的目标DOA 估计.为此,本文进行目标导向矢量补偿,具体措施为重构角度原子库.设L e 、L a 、N 1和N 2分别表示俯仰维角度原子数、方位维角度原子数、面阵行数和列数.对式(13)进行稀疏表示,即y (n )=Φω(n )+v (n )(14)式中,Φ表示重构原子库,ω(n )Î L ´1为稀疏系数.Φ可表示为Φ=B Φ(15)式中,B 表示重构矩阵,即特征投影矩阵(见式(7));Φ表示初始原子库,其由L e ´L a 个原子构成:Φ=Φe ⊗ΦaÎ (N 1´N 2)´(L e ´L a )(16)式中,Φe 和Φa分别表示俯仰维和方位维初始角度原子库,其表达式为空军预警学院学报2020年404Φe =[a (θη1) a (θη2) a (θηL e)]Î N 1´L e Φa =[a (θη1) a (θη2) a (θηLa)]Î N 2´L a }(17)式中,θηL e、θηL a分别表示原子库Φe 和Φa 第L e个和第L a 个原子.由于引入补偿矩阵B 会导致Φ矩阵中的元素不再为单位模值,会影响后续OMP 算法中的正交投影步骤,因此,还需要对Φ矩阵中的所有元素进行模值归一化处理,即Φ=nor(Φ)(18)2.4基于OMP 算法的目标DOA 估计令标签集Ω0=Æ,初始化残差向量r 0=y (n ),令k =1.求Φ中与残差向量r k -1的最强相关原子位置:l k =argmax l|<Φl r k -1>|(19)式中Φl 为Φ的第l 列.更新Ωk :Ωk =Ωk -1 {l k }(20)则第k 次迭代残余更新为r k =y (n )-ΦΩkωk(21)式中ωk 表示稀疏系数,可通过最小化迭代残余r k 进行求解,即ωk =argmin ωk||y (n )-ΦΩkωk ||2(22)可得:ωk =(ΦH ΩkΦΩk)-1ΦHΩky (n )(23)按照式(19)—式(21)和式(23)反复迭代,直到满足收敛条件为止.通常迭代终止条件有2个:①已知稀疏度,可预先设置迭代步数;②令迭代残余小于某个预先设定的小ε,即||r k ||2£ε.最后,根据稀疏系数ω的非零值位置,可以估计得到目标的方位-俯仰角参数信息.2.5方法步骤设输入为阵列接收信号x (n )Î(N 1´N 2)´1和初始角度原子库ΦÎ (N 1´N 2)´(L e ´L a ),输出为目标距离估计r 和稀疏系数ω,基于原子重构的雷达抗主瓣干扰方法的具体步骤如下.Step 1利用式(4)进行特征分解,依据式(6)求出特征投影输出y EMP (n ),根据式(11)和式(12)求得目标距离估计.Step 2按照式(13)进行数据截取.Step 3按照式(14)建立稀疏模型,根据式(14)进行原子重构,再归一化处理求Φ.Step 4令标签集Ω0=Æ,初始化残差向量r 0=y (n ),k =1.Step 5依据式(19)求解Φ中与残差向量r k -1相关性最强的原子位置,根据式(20)和式(21)更新Ωk 和r k .Step 6根据式(22)求解稀疏系数ωk ,其体现为信号能量.Step 7令k ®k +1,重复Step 5和Step 6,直至满足||r k ||2£ε为止.3仿真验证与性能分析3.1线阵模型考虑等距均匀线阵,详细参数设置如表1所示,干扰环境如表2所示.分别在干扰环境1、干扰环境2和干扰环境3设置阵元级信噪比(SNR e ,用ρSNR e表示)分别为-5dB 、12dB 和30dB .图2给出了这3种干扰环境下的目标参数(距离、角度)估计结果.其距离估计结果均为100,角度估计结果分别为0.114°、0.171°和-0.171°.可见,其估计结果与原参数设置基本一致.功率/dB010203040210-1-210510095距离单元功率/dB010203040210-1-210510095距离单元功率/dB010203040210-1-210510095距离单元X: 100Y: 0.114Z: 32.17XY: 0.171Z: 33.32Y: -0.171Z: 39.12角度/( )角度/( )角度/( )(a)干扰环境1(b)干扰环境2(c)干扰环境3图2目标参数估计结果第6期胡敏,等:一种基于原子重构的雷达抗主瓣干扰方法4051)输入SNR e 和归一化夹角对方法性能的影响假设电磁环境中存在1个干扰,干噪比INR 为80dB ,其空间角度变化区间为[-2 2]B 0.5.当干扰位于[-1/2 1/2]B 0.5时表现为主瓣干扰.目标阵元级信噪比SNR e 变化区间为[-15,45]dB .所有结果均为100次Monte Carlo 仿真实验的统计平均所得.图3和图4分别给出了目标距离估计均方根误差(RMSE)和目标角度估计RMSE 结204060801000210-1-2020-20目标距离估计RMSE归一化夹角输入SNRe/dB(a)3D 图2.01.00-1.0-2.01.50.5-0.5-1.50-15-10-551015203040506070809010归一化夹角输入SNRe/dB(b)投影图图3目标距离估计均方根误差果(其中归一化夹角表示目标与干扰的夹角比值于B 0.5).由图3和图4可见,目标的距离及角度估计精度将随着SNR e 的增加而提高,随着目标与干扰夹角的增大而提高.假设目标角度估计有效的标准为B 0.5/10,即0.5°.根据图4(c)可见,目标角度估计有效区间分别为ρSNR e³-12dB 、ρSNR e³-5dB 、ρSNR e³3dB 及ρSNR e³8dB .图5给出了输出信干噪比(SINR)曲面.显然,当输入SNR e 增加或者目标与干扰夹角增加时,输出SINR 将随着提高.图6进一步给出了目标信号损失曲线,可见当目标与干扰的归一化夹角分别为B 0.5/2、B 0.5/4、B 0.5/10和B 0.5/20时,目标SNR 损失分别为2.612dB 、7.454dB 、14.950dB和21.050dB .综上所述,表3给出了目标与干扰归一化夹角变化情况下的目标角度估计有效区间及目标SNR 损失,即性能分析1.2.000.40.81.21.60-10102030400.10.20.30.4归一化角度输入SNRe/dB00.20.40.60.81.01.21.4.6-10010203040输入SNRe/dB00.10.20.30.40.52.01.01.50.502040归一化角度输入SNRe/dB目标角度估计RMSE/( )目标角度估计RMSE/( )B0.5/2B0.5/4B0.5/10B0.5/200.5(a)RMSE 曲面(b)投影图(c)RMSE 曲线图4目标角度估计均方根误差20304050100210-1-2归一化夹角输出SNRe/dB020-20输入SNRe/dB--2-1-1-归一化夹角SNR损失/dB)图5输出SINR 曲面图6目标SNR 损失曲线2)干扰数量对方法性能的影响设置3种干扰环境,详见表2.图7和图8分别给出了不同干扰数量情况下的输出SINR 曲线和目标角度估计RMSE 结果.显然,输出SINR 与目标角度估计精度将随着干扰数量的增加而下降.根据图7和图8,表4给出了3种干扰环境下的目标角度估计有效区间和目标SNR 损失情况,即性能分析2.由此可见,当干扰数量较多时,需要空军预警学院学报2020年406-15-10-505101501020304050输出SNRe/dB输入SNRe/dB无干扰 干扰环境1干扰环境2干扰环境3图7干扰数变化情况下的输出SINR 曲线00112输入SNRe/dB目标角度估计RMSE/( )图8干扰数变化情况下的目标角度估计RMSE通过提高SNR e 才可保证较好的目标测角精度.3.2面阵模型考虑面阵模型,其参数设置如表5所示.图9给出了目标各参数的估计结果,由图9可见,目标距离、方位角和俯仰角估计分别为100、89.93°和29.95°,该结果与仿真参数设置基本一致.下面给出2个比较典型的主瓣干扰场景以分析方法性能,所有结果均为100次Monte Carlo 仿真实验的统计平均.1)干扰场景1假设目标机的空间角度由(91.05°,30.00°)变化到(88.95°,30.00°),干扰机的空间角度固定在(91.05°,31.25°),如图10(a)所示.图10(b)和图10(c)分别给出了目标方位角估计RMSE 及目标俯仰角估计RMSE ,并与分维类法进行了对比.由图10(b)可见,本文方法的目标方位角估计精度要略高于分维类法;由图10(c)可见,当目标的方位角与干扰方位角十分接近时,分维类法将失去估计目标俯仰角的能力,而本文方法并不受功率/dB102030400951051003031322928距离单元俯仰角/( )X: 29.95Y: 100Z: 38.38功率/dB102030400951051009091928988距离单元方位角/( )32方位角/( )功率/dB1234俯仰角/( )X: 89.93X: 89.93Y: 100Z: 38.38(a)距离-俯仰估计(b)距离-方位估计(c)俯仰-方位估计图9目标参数估计结果方位向俯仰向1/2个3B波束宽度12个3B波束宽89.089.489.890.290.691.00.20.30.40.50.60.70.80.9目标方位角/( )目标方位角/( )目标方位角估计RMSE/( )目标俯仰角估计RMSE/( )波束指向目标位置干扰位置00.51.52.02.53.089.089.489.890.290.691.01.0分维类法本文方法分维类法本文方法(a)电磁环境1(b)目标方位角估计RMSE (c)目标俯仰角估计RMSE图10电磁环境1下目标角度估计RMSE影响.2)干扰场景2假设目标机的空间角度由(91.05°,30.00°)变化到(88.95°,30.00°),干扰机的空间角度由(91.05°,31.25°)变化到(88.95°,31.25°),目标与干扰的速度相同,即典型的伴飞式主瓣干扰,如图11(a)所示.1/2个3B波束宽度俯仰向12个3B波束宽方位向0.30.40.50.60.70.80.989.089.489.890.290.691.0目标方位角/( )00.51.52.02.53.089.089.489.890.290.691.0目标方位角/( 目标方位角估计RMSE/( )目标俯仰角估计RMSE/( )波束指向目标位置干扰位置1.0分维类法本文方法分维类法本文方法(a)电磁环境2(b)目标方位角估计RMSE (c)目标俯仰角估计RMSE图11电磁环境2下目标角度估计RMSE第6期胡敏,等:一种基于原子重构的雷达抗主瓣干扰方法407图11(b)和图11(c)分别给出了目标方位角估计RMSE及目标俯仰角估计RMSE,并与分维类法进行了对比.由图11(b)可见,本文方法的目标方位角估计精度要略高于分维类法;由图11(c)可见,由于目标的方位角与干扰方位角相等,分维类法无法估计目标俯仰角,而本文方法并不受影响.4结束语为有效对抗主瓣干扰,本文提出了一种基于原子重构的雷达抗主瓣干扰方法,可在有效抑制主瓣干扰的同时保证较高的目标距离-角度估计精度,且对天线阵列没有苛刻要求,既可应用于面阵,也可应用于线阵.当目标与干扰的某一维空域角度相等时,所提方法仍然可以有效地同时估计目标距离、方位角和俯仰角.参考文献:[1]王永良,丁前军,李荣锋.自适应阵列处理[M].北京:清华大学出版社,2009:66-67.[2]APPLEBAUM S P,WASIEWICZ R.Main beam jammercancellation for monopulse sensors:DTIC RADC-TR-86-267[R].Fort Belvoir,1984.[3]李荣锋,饶灿,戴凌燕,等.子阵间约束自适应和差单脉冲测角算法[J].华中科技大学学报(自然科学版),2013,41(9):6-10.[4]LI Rongfeng,RAO Can,DAI Lingyan,et bining sum-difference and auxiliary beam for adaptive monopulse in jamming[J].Journal of Systems Engineering and Electron-ics,2013,24(3):372-381.[5]周必雷,李荣锋,戴凌燕,等.和差四通道及辅助阵元联合自适应单脉冲方法[J].系统工程与电子技术,2017,39(9): 1905-1914.[6]CHEN Xinzhu,SHU Ting,YU Kai-Bor,et al.EnhancedAD-BF architecture for monopulse angle estimation in multiple jammings[J].IEEEAntennas and Wireless Propagation Let-ters,2017,16:2684-2687.[7]YU Kai-Bor.Mainlobe cancellation,orthogonal nulling andproduct patterns[C]//Proceedings of IEEE International Symposium on Phased Array Systems and Technology.IEEE,2017:1-7.[8]施龙飞,任博,马佳智,等.雷达极化抗干扰技术进展[J].现代雷达,2016,38(4):1-7.[9]DAI Huanyao,WANG Xuesong,LIU Yong,et al.Novel re-search on main-lobe jamming polarization suppression technology[J].Science China:Information Sciences,2012, 52(2):368-376.[10]张池,王峰,马正颖.基于认知型盲源分离的雷达主瓣干扰抑制技术研究[J].现代雷达,2017,39(8):32-36. [11]王瑜,李小波,周青松,等.联合BSS和FRFT的雷达抗主瓣干扰新方法[J].现代雷达,2016,38(7):72-77.[12]DING Liming,LI Rongfeng,WANG Yongliang,et al.Dis-crimination and identification between mainlobe repeater jamming and target echo by basis pursuit[J].IET Radar, Sonar and Navigation,2017,11(1):11-20.[13]DING Liming,LI Rongfeng,DAI Lingyan,et al.Discrimi-nation and identification between mainlobe repeater jam-ming and target echo via sparse recovery[J].IET Radar, Sonar and Navigation,2017,11(2):235-242.An atom-reconstruction-based radar main lobe jammingsuppression methodHU Min1,LI Rongfeng1,ZHOU Bilei2(1.Aerospace Nanhu Electronic Information Technology Co.,Ltd.,Jingzhou434000,China;2.Air Force Early Warning Academy,Wuhan430019,China)Abstract:In order to improve the radar combat capability in the case of main lobe jamming,this paper pro-poses an atom-reconstruction-based radar main lobe jamming(MLJ)suppression method.This method can sup-press the MLJ and simultaneously provide relatively higher estimation accuracy of the target range and angle. First,eigen-projection matrix preprocessing(EMP)algorithm is used for the MLJ suppression,and then the target range is estimated by beamforming and pulse compression.Finally,the atom-reconstruction method is used to esti-mate the target angle.This method has no high requirement for radar array structure,applicable to both linear and planar arrays.When the target azimuth(or elevation)equals the jamming azimuth(or elevation),the proposed method can effectively estimate both the target azimuth and elevation simultaneously.Key words:radar;main lobe jamming;anti-jamming;atom-reconstruction。
多波形复合体制雷达导引头抗干扰策略设计研究
多波形复合体制雷达导引头抗干扰策略设计研究发布时间:2022-08-14T01:05:08.205Z 来源:《科学与技术》2022年7期作者:姜虹旭[导读] 本文根据DRFM干扰、拖曳式干扰及其特性,分析了雷达导引头采用的波形及抗干扰策略姜虹旭1,21.哈尔滨工业大学,哈尔滨 150006;2.江南机电设计研究所,贵阳 550009摘要:本文根据DRFM干扰、拖曳式干扰及其特性,分析了雷达导引头采用的波形及抗干扰策略,提出了多波形复合制导雷达导引头抗干扰策略,对多波形复合制导抗干扰策略进行了仿真验证,仿真结果显示该方法具有良好的干扰抑制效果。
关键词:雷达导引头抗干扰多波形1 概述按照干扰产生的途径,可分为有意干扰和无意干扰;按照能量的来源,将雷达干扰分为有源干扰和无源干扰;从干扰效果角度有源干扰又可分为欺骗干扰和压制干扰。
干扰样式主要有距离欺骗干扰,速度欺骗干扰、角度欺骗、各种压制干扰及数种干扰样式的复合干扰等。
从战术运用角度看,电子战装备针对地面防空导弹武器系统产生的有源电子干扰可分为:远距支援(SOJ)、随队干扰(ESJ)、自卫干扰(SSJ)和诱饵干扰等。
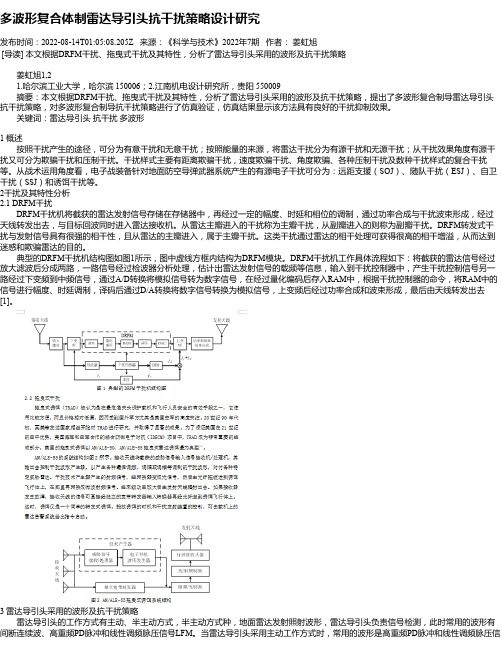
2干扰及其特性分析2.1 DRFM干扰DRFM干扰机将截获的雷达发射信号存储在存储器中,再经过一定的幅度、时延和相位的调制,通过功率合成与干扰波束形成,经过天线转发出去,与目标回波同时进入雷达接收机。
从雷达主瓣进入的干扰称为主瓣干扰,从副瓣进入的则称为副瓣干扰。
DRFM转发式干扰与发射信号具有很强的相干性,且从雷达的主瓣进入,属于主瓣干扰。
这类干扰通过雷达的相干处理可获得很高的相干增溢,从而达到迷惑和欺骗雷达的目的。
典型的DRFM干扰机结构图如图1所示,图中虚线方框内结构为DRFM模块。
DRFM干扰机工作具体流程如下:将截获的雷达信号经过放大滤波后分成两路,一路信号经过检波器分析处理,估计出雷达发射信号的载频等信息,输入到干扰控制器中,产生干扰控制信号另一路经过下变频到中频信号,通过A/D转换将模拟信号转为数字信号,在经过量化编码后存入RAM中,根据干扰控制器的命令,将RAM中的信号进行幅度、时延调制,译码后通过D/A转换将数字信号转换为模拟信号,上变频后经过功率合成和波束形成,最后由天线转发出去[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达波形设计及抗主瓣有源干扰若干技术研究
雷达波形设计及抗主瓣有源干扰若干技术研究
引言:
雷达作为一种重要的探测和测量工具,被广泛应用于军事、航空、航天、气象等领域。
然而,面对现代电子战技术的不断发展,雷达面临着日益严峻的抗干扰挑战。
有源干扰是指干扰源通过发送干扰波形来对雷达进行干扰。
为了应对这一挑战,雷达波形设计及抗主瓣有源干扰的技术研究日益引起人们的关注。
本文将对这一领域进行探讨和总结。
一、雷达波形设计的基本原则
雷达波形设计是指在特定任务要求下,通过设计合适的波形使得雷达能够更好地完成探测和测量任务。
波形设计的基本原则主要包括以下几个方面:
1.1 利用波形的相干积累提高信噪比
在信号处理中,由于噪声的存在,接收信号的信噪比往往较低。
通过合适的波形设计,可以利用相干积累技术,提高信号的有效功率使得信噪比得到提高,从而改善雷达的性能。
1.2 优化波形带宽与中心频率
波形的带宽和中心频率直接影响到雷达的探测能力和测量精度。
对于不同任务需求,需要根据目标距离、速度等参数进行合理的选择,以保证雷达系统的最佳性能。
1.3 减小副瓣
副瓣是指雷达波形在主瓣以外出现的其他能量。
副瓣会对目标探测和测量产生干扰,因此需要通过设计合适的波形,使得副瓣能量尽可能降低,以提高雷达系统的性能。
二、抗主瓣有源干扰的技术研究
为了应对有源干扰对雷达系统的干扰,研究人员提出了一系列的技术方法,以增强雷达的抗干扰能力。
以下是几种常见的方法:
2.1 频谱疏密转换技术
频谱疏密转换技术是指通过改变波形的频谱密度来增强抗干扰能力。
通过调整波形的频谱规律,可以有效削弱有源干扰信号在雷达接收机中的能量,从而提高目标的探测和测量性能。
2.2 码型设计
码型设计是指通过设计特定的波形码型,使得有源干扰信号难以与自身的信号混叠,从而实现抗干扰的目的。
常见的码型设计方法包括伪码法、线性调频法等。
2.3 时频联合处理
时频联合处理是指通过综合时域和频域的信息,实现对干扰信号的抑制和目标信号的增强。
通过巧妙地设计时频处理算法,可以提高雷达系统对有源干扰的抗干扰能力。
2.4 自适应滤波技术
自适应滤波技术是指通过对接收信号进行实时的自适应滤波处理,来抑制干扰信号并增强目标信号,从而提高抗干扰能力。
结论:
随着电子战技术的快速发展,雷达面临着日益严峻的抗干扰挑战。
雷达波形设计及抗主瓣有源干扰若干技术的研究成为了一个热门领域。
通过合理的波形设计和创新的抗干扰技术,可以极大地提高雷达系统的性能和抗干扰能力。
然而,随着干扰技术的不断升级,我们仍需不断地进行研究和创新,以应对日益复杂的电子战环境,保障雷达系统的正常运行
综上所述,频谱疏密转换技术、码型设计、时频联合处理和自适应滤波技术是当前研究和应用较广泛的抗干扰技术。
这些技术通过改变波形频谱密度、设计特定的波形码型、综合时频信息以及实时自适应滤波处理,有效提高了雷达系统对有源干扰的抗干扰能力。
然而,随着电子战技术的不断发展,雷达面临着日益严峻的抗干扰挑战。
因此,我们需要不断研究和创新,以应对日益复杂的电子战环境,保障雷达系统的正常运行。
通过合理的波形设计和创新的抗干扰技术,可以极大地提高雷达系统的性能和抗干扰能力。