车辆主动悬架协调控制技术研究
汽车悬挂系统的主动控制研究
汽车悬挂系统的主动控制研究近年来,汽车悬挂系统的主动控制技术日益成熟,成为汽车行业的一个热门研究领域。
汽车悬挂系统的主动控制技术可以对汽车的悬挂系统进行精细化的调节和控制,提高汽车的舒适性、稳定性和安全性。
汽车悬挂系统的主动控制技术的核心是控制算法。
现代汽车悬挂系统采用了许多先进的传感器和控制器,可以实时测量和分析车辆的运动状态和车身姿态,通过计算机控制算法对悬挂系统的刚度、阻尼、高度等参数进行精准调整,以适应不同路况和驾驶条件。
主动控制技术可以根据车速、路面质量、载荷、弯道等多种因素实时调整悬挂系统的参数,使驾驶员和乘客的舒适度和安全性得到提升。
在汽车悬挂系统的主动控制技术中,主要有三种基本类型:主动悬挂、半主动悬挂和电子悬挂。
主动悬挂是指悬挂系统可根据路况和行驶状态主动调整刚度和阻尼,提供最佳的车身控制和舒适性。
半主动悬挂主要是指在保留传统悬挂系统的基础上,通过传感器和控制器实时调整阻尼来提高车辆的稳定性。
电子悬挂则采用了更先进的电子控制技术,它能根据通过传感器收集到的各种数据来自动控制悬挂系统的刚度、阻尼和高度等参数。
汽车悬挂系统的主动控制技术可以帮助各种类型的汽车提高性能和舒适性。
在高性能汽车中,主动悬挂系统可以提供更加精确和快速的车辆控制,帮助驾驶员更好地处理车辆在高速行驶和高强度驾驶时的操控。
在家用车型中,主动悬挂系统可以提供更加平稳和舒适的驾驶体验,减少车辆颠簸和颠簸对驾驶员和乘客的不适感。
需要注意的是,汽车悬挂系统的主动控制技术虽然可以提高汽车的性能和舒适性,但也需要消费者具备一定的技术知识和技能才能操作和维护。
在购买搭载主动控制技术的汽车时,消费者需要了解相关的技术细节和操作指南,并且必须经过专业的培训和考核,才能合理使用和维护这些先进的汽车悬挂系统。
综上所述,汽车悬挂系统的主动控制技术是一项前沿的汽车技术,它可以提高汽车的性能、舒适性和安全性,为汽车行业的发展注入了新的活力。
汽车悬挂系统的主动控制研究

汽车悬挂系统的主动控制研究随着社会经济的发展和人们对行车安全和舒适性的要求提高,汽车悬挂系统的研究和发展成为一个热门的课题。
传统的汽车悬挂系统主要由弹簧和减振器组成,其主要作用是缓冲和减震车身的激励。
随着科技的进步和电子控制技术的发展,主动悬挂系统逐渐成为一种新的选择。
主动悬挂系统通过传感器感知车身和路面的状态,并利用电子控制单元(ECU)控制悬挂系统的参数和工作方式。
主动悬挂系统可以根据道路情况和车速自动调节悬挂刚度和减震器的阻尼力,以实现更好的悬挂效果。
主动悬挂系统的研究主要集中在以下几个方面:1. 主动悬挂系统的动力学模型:研究主动悬挂系统的动力学特性,建立合理的模型,以便后续的控制算法设计和仿真分析。
2. 车身姿态控制:主动悬挂系统可以通过调节车身的姿态来改善车辆的稳定性和驾驶性能。
研究者通过设计反馈控制算法,使主动悬挂系统能够实时调节悬挂刚度和减震器的阻尼力,以实现车身的主动控制。
3. 路面感知和状态估计:主动悬挂系统需要通过传感器感知车辆行驶的路面情况,并对路面的状态进行估计。
研究者通过使用加速度计、角度传感器和车轮转角传感器等传感器,实时获取车身和路面的状态信息。
4. 控制算法设计和优化:主动悬挂系统的控制算法设计非常重要,可以通过设计合理的控制策略来提高悬挂系统的性能。
研究者通过使用PID控制算法、模糊控制算法和神经网络等方法,优化主动悬挂系统的控制策略。
5. 实验验证和性能评估:研究者通过在实际车辆上安装主动悬挂系统,并进行实地测试和性能评估,验证研究成果的可行性和有效性。
汽车悬挂系统的主动控制研究是一个复杂而有挑战性的领域,涉及多学科的知识和技术。
随着科技的不断进步,主动悬挂系统将会在未来得到更广泛的应用,为驾驶人提供更安全、舒适和平稳的行车体验。
《基于多算法融合的汽车主动悬架预瞄控制研究》范文

《基于多算法融合的汽车主动悬架预瞄控制研究》篇一一、引言汽车主动悬架系统是现代汽车技术的重要组成部分,其性能直接关系到车辆的行驶平稳性、乘坐舒适度以及操控稳定性。
随着科技的发展,多算法融合技术为汽车主动悬架控制提供了新的研究思路。
本文将针对基于多算法融合的汽车主动悬架预瞄控制进行研究,以提高汽车悬架系统的性能。
二、汽车主动悬架系统概述汽车主动悬架系统是一种能够主动调节悬挂刚度和阻尼的悬架系统,通过实时感知路面状况和车辆状态信息,主动调整悬挂参数,以实现更好的行驶性能。
然而,传统的主动悬架控制系统往往存在响应速度慢、稳定性差等问题。
因此,如何提高汽车主动悬架控制系统的性能成为了一个亟待解决的问题。
三、多算法融合技术在汽车主动悬架控制中的应用多算法融合技术可以通过综合运用多种算法,实现对车辆状态和路况的更准确感知和预测,从而提高汽车主动悬架控制系统的性能。
具体而言,多算法融合技术包括以下几个方面:1. 预瞄控制算法:预瞄控制算法可以通过预测未来路况,提前调整悬架参数,提高车辆行驶的平稳性和舒适性。
2. 模糊控制算法:模糊控制算法可以根据车辆状态和路况信息,实时调整悬架参数,实现对车辆状态的精确控制。
3. 神经网络控制算法:神经网络控制算法可以通过学习大量数据,实现对车辆状态和路况的更准确预测和判断,进一步提高汽车主动悬架控制系统的性能。
在本文中,我们将研究如何将这三种算法进行有效融合,以实现对汽车主动悬架的更精确控制。
四、基于多算法融合的汽车主动悬架预瞄控制研究1. 系统模型建立:首先,我们需要建立汽车主动悬架系统的数学模型,包括车辆动力学模型、路况模型等。
这些模型将为我们后续的研究提供基础。
2. 预瞄控制算法研究:我们将研究预瞄控制算法在汽车主动悬架控制系统中的应用,通过预测未来路况,提前调整悬架参数,以提高车辆行驶的平稳性和舒适性。
3. 模糊控制和神经网络控制算法融合:我们将研究如何将模糊控制和神经网络控制算法进行有效融合,以实现对车辆状态的更精确控制和预测。
车辆主动悬架最优控制

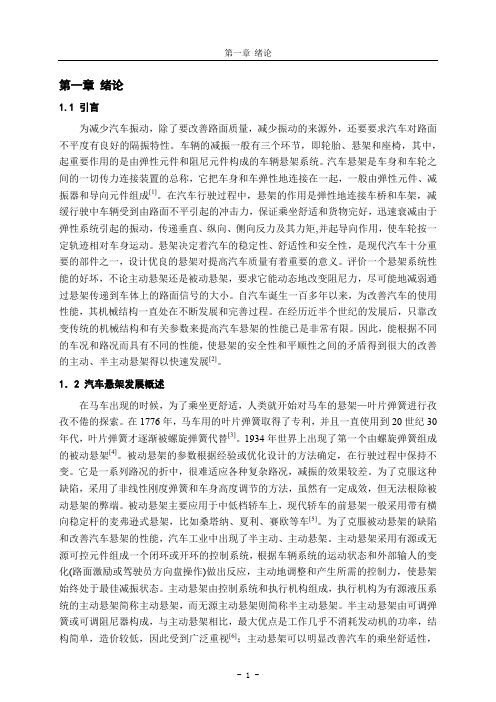
图 1. q1=3.35E5 ,q2 =40.5E5 的幅频特性图 由图 1 可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相 似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化 平缓, 主动悬架的减振性能较为突出; 在高频固有频率附近, 主动悬架的响应幅值变化较大 。 可知取该组权系数时,主动悬架的减振性能的改善程度不够理想; 2) 取 q1=3.35E8,q2 =40.5E8 时,由程序得 k1 =63640;k2=4863;k3 =-36146;k4 =-904;及 系统的传递函数和幅频特性,绘制幅频特性图 %主动悬架 q1=3.35e8;q2=40.5e8 时的仿真程序: m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8; A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0]; B=[0;1/m2;0;-1/m1];D=[0;0;1;0]; C=[0 0 0 0;1 0 0 0;0 0 1 0]; E=[1/m2;0;0];H=[0;0;0]; Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1]; [K,P,F]=lqr(A,B,Q,R) M=A-B*K; N=C-E*K; G=ss(M,D,N,H); G1=tf(G) i=1; for s=0:0.1:80 s=s*2*pi*j; G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);
汽车主动悬架及控制方法的研究
摘要作为整体车辆的重要组成部分,。
车辆悬架对汽车的各项性能(包括汽车操纵稳定性、行驶平顺性和行驶速度等)产生重大影响。
传统的被动悬架一般由具有阻尼元件和固定参数的弹性元件组成,被设计为适应某一种路面,不利于进一步提高车辆性能。
20世纪70年代工业发达国家已经开始研究基于振动主动控制的主动、半主动悬架系统。
近年来随着机械动力学、测控技术、电子技术等学科的快速发展,车辆悬架系统由传统被动隔振发展到新兴的振动主动控制。
尤其是信息科学中对模糊控制、人工神经网络、自适应控制、最优控制等的研究,悬架系统振动控制技术在现代控制理论指导变得更趋完善,同时已推广应用于车辆悬架系统的振动控制,悬架系统振动控制技术得到了快速发展。
与此同时,伴随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将振动控制到最低水平是提高现代车辆品质的一项极为重要的措施。
关键词:主动悬架控制策略模糊控制ABSTRACTSuspension system is an important part of the vehicle., Vehicle suspension performance is one of the important factors,which affects vehicle’s ride comfort, handling stability and speed .Traditional passive suspension generally consists offixed paramete elastic member and damping components, it is designed to accommodate a particular surface, which limits further improvemennt of vehicle performance. in 1970s, industrial countries have begun to study active vibration control which is based on active, semi-active suspension system. In recent years, the rapid development of electronic technology, control technology, mechanical dynamics and other disciplines,makinng the vehicle suspension system develop from the traditional passive control to active vibration control.especially the research of optimal control, adaptive control, fuzzy control, artificial neural networks and other research in information science . Not only the suspension system vibration control technology which is under the guidance of mordern control is more perfect,but also it has been applied to the vehicle suspension system’s vibration control, so The suspension system vibration control technology is made to the rapid development. with the continuous improvement and perfection of the vehicle structure and function, the research of the vehicle vibration, the design of new type suspension systems, and The vibration control to the lowest level is of the most important measures to improve the quality of modern vehicles.Key words; active suspension control strategy fuzzy Control目录摘要........................................................................... 错误!未定义书签。
《基于多算法融合的汽车主动悬架预瞄控制研究》范文
《基于多算法融合的汽车主动悬架预瞄控制研究》篇一一、引言随着汽车工业的飞速发展,人们对汽车的舒适性、稳定性和安全性要求越来越高。
汽车主动悬架系统作为提升这些性能的关键技术之一,其控制策略的研究显得尤为重要。
本文将探讨基于多算法融合的汽车主动悬架预瞄控制,以提高汽车的行驶性能和乘坐舒适性。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,能够根据路面状况、车速等信息实时调整悬架的刚度和阻尼,以优化车辆的行驶性能和乘坐舒适性。
该系统主要由传感器、控制器和执行器等部分组成。
三、传统汽车悬架控制算法分析传统的汽车悬架控制算法主要包括天棚阻尼控制、地棚阻尼控制、最优控制等。
这些算法在特定工况下具有一定的效果,但在复杂路况和多变驾驶需求下,其控制效果往往不尽如人意。
因此,需要研究更为先进的控制算法,以提高汽车主动悬架系统的性能。
四、多算法融合的汽车主动悬架预瞄控制策略针对传统算法的局限性,本文提出了一种基于多算法融合的汽车主动悬架预瞄控制策略。
该策略将多种算法进行优化和融合,以实现更精确的预瞄控制和更优的车辆性能。
1. 算法选择与优化首先,选择适合汽车主动悬架系统的算法,如模糊控制、神经网络控制、滑模控制等。
针对不同算法的优点和局限性,进行参数优化和调整,以提高算法的适应性和控制效果。
2. 多算法融合将优化后的算法进行融合,形成多算法融合的控制策略。
通过分析不同算法的输出,综合各种算法的优点,以提高悬架系统的综合性能。
例如,模糊控制可以处理不确定因素,神经网络可以学习并适应复杂路况,滑模控制可以保证系统的稳定性。
3. 预瞄控制在多算法融合的基础上,引入预瞄控制策略。
通过预测未来路面状况和车辆运动状态,提前调整悬架系统的参数,以实现更优的车辆性能和乘坐舒适性。
预瞄控制可以基于传感器数据、车辆动力学模型等信息进行实现。
五、实验与结果分析为了验证基于多算法融合的汽车主动悬架预瞄控制策略的有效性,进行了实验验证。
《2024年基于智能控制的汽车主动悬架控制策略研究》范文
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,汽车主动悬架系统已经成为现代汽车安全与舒适性的重要组成部分。
通过采用先进的控制策略,主动悬架系统可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
本文将重点研究基于智能控制的汽车主动悬架控制策略,旨在为汽车悬架系统的优化设计提供理论依据和技术支持。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,通过传感器实时监测路面状况和车辆运动状态,采用先进的控制算法对悬架进行实时调整,以实现最佳的行驶性能。
与传统的被动悬架系统相比,主动悬架系统具有更高的灵活性和适应性。
三、智能控制在汽车主动悬架系统中的应用智能控制技术在汽车主动悬架系统中发挥着重要作用。
通过采用先进的控制算法和传感器技术,实现对车辆运动状态的实时监测和调整。
常见的智能控制策略包括模糊控制、神经网络控制、遗传算法等。
这些控制策略可以根据不同的道路条件和驾驶需求,对悬架系统进行实时调整,以实现最佳的行驶性能。
四、基于智能控制的汽车主动悬架控制策略研究(一)控制策略设计本文提出一种基于模糊控制的汽车主动悬架控制策略。
该策略通过建立模糊控制器,实现对车辆运动状态的实时监测和调整。
模糊控制器采用输入输出映射的方法,将传感器采集的信号进行模糊化处理,然后根据预设的规则进行决策,最后输出控制信号对悬架系统进行调整。
(二)仿真分析为了验证所提出的控制策略的有效性,本文采用仿真分析的方法。
通过建立车辆动力学模型和主动悬架系统模型,对所提出的控制策略进行仿真测试。
仿真结果表明,该控制策略可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
五、实验验证与结果分析为了进一步验证所提出的控制策略的实用性,本文进行了实验验证。
通过在实车上进行实验测试,对比传统被动悬架系统和所提出的主动悬架控制策略在不同道路条件下的性能表现。
实验结果表明,所提出的基于智能控制的汽车主动悬架控制策略在提高车辆行驶稳定性、乘坐舒适性以及操控性能方面具有显著优势。
汽车主动悬架控制方法研究
- 2 -
第一章 绪论
1.3.3 主动悬架系统 主动悬架系统是一种有源控制,主动悬架可以根据车辆行驶条件的变化,主动改变 悬架的刚度和阻尼系数, 主要由可控的电液作动器组成[13]。 作动器相当于一个力发生器, 根据车身质量的速度响应等反馈信号,按照一定的控制规律产生作用力。它可替代被动 悬架中弹簧和阻尼器,任意变更和调整刚度及阻尼系数。主动悬架的最大优点是适应性 强,可很好地满足不同环境的要求(如不同道路条件和行驶速度等)。这种装置所要求的 控制目标是实现一个最佳的隔振系统,而且不需要对系统作较大的改变。此种系统功率 消耗很大,另外,要用到的传感器也很多[14]。 1.4 主动悬架的国内外研究概况 70 年代初,Crosby 和 Kamop 首先提出了主动悬架控制的概念[15],近年来,国内外 学者应用控制理论提供的方法在汽车主动悬架控制系统的研究方面做了大量的研究工 作:PID 控制、最优控制、自适应控制、神经网络控制、模糊控制、预见控制和鲁棒控 制等[16]。 车辆悬架振动系统大多采用传感器拾取车身绝对速度、 车身对车轴的相对速度、 车身的加速度等信号,经微处理器发出指令执行适时控制,由电液控制阀或步进电机等 执行机构调节阻尼系数或控制力,其研究进展和开发应用与机械动力学,流体传动及测 控技术、计算机技术、电子技术、材料科学等多个学科的发展紧密相关[17]。近十年来, 这些学科的发展为悬架系统从被动隔振走向振动的主动控制奠定了基础。 特别是信息科 学中对最优控制、自适应控制、模糊控制、人工神经网络控制等的研究,不仅在理论上 取得令人瞩目的成绩,同时也已开始应用于汽车悬架系统的振动控制,使车辆悬架振动 控制系统的研究不仅在理论上和方法上取得了显著的进步, 而且也出现了工程实际应用 的可能[18]。 Hoo 最优控制是在保证闭环系统各回路稳定下设计控制器,使相对噪声干扰的输出 取极小的一种控制法。这种控制方法在德国大众汽车公司的底盘上得到了应用[19]。日本 的 Moran Antonio 和 Nagai Masaoll 将神经网络控制应用于主动/半主动悬架上, 通过神经 观测器辨识出悬架的逆动力学特性,在此基础上,神经控制器采用非线性最优控制策略 对悬架进行控制,减小汽车振动,模拟计算结果说明神经网络控制较线性反馈控制,系 统性能改善约 10%,研究表明用神经网络控制的非线性悬架系统,比用传统的 LQ 调节 器控制的悬架具有更好的性能。L.Palkovics 等人应用天棚控制,最优控制,变结构鲁 棒控制,Hoo/RLQR 控制方法,并对不同控制策略的鲁棒性进行了分析。另外,荷兰 的 R.G.M.Huisman 和 F.E.Veldpaus 等人基于最优控制理论,设计应用带有预见 的连续时间控制策略,控制对象为两自由度的牵引车主动悬架,控制目标为簧载质量的 振动加速度,路面为阶跃输入时,与被动悬架相比,控制目标有了较大幅度地降低[20]。 随着国内经济的迅速腾飞,我国的汽车工业也取得了长足发展,由于起步较晚等原 因,还处于理论研究和安装调试的阶段,因而这方面的具体研究成果相对还比较少。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
好的反映悬架系统对整车的影响遥 利用 Adams 软件搭建整车虚 拟样机模型袁同时袁基于模糊控制算法搭建垂向运动控制器尧侧倾 控制器及协调控制器袁 把控制系统和车辆机械系统联合起来袁更 准确的反映整车综增多和在家庭生活中的普及袁 人们对汽 车的乘坐体验和驾驶安全的要求越来越高遥悬架系统作为整车的 重要构成部分袁连接着车身和车轮袁影响着整车的舒适性和稳定 性遥 相较于传统的被动悬架袁主动悬架具有更好可控性袁它可以根 据汽车的行驶状况袁由作动器给悬架施加主动力袁使车辆在各种 行驶环境下都会具有很好的性能遥但汽车平顺性和操纵稳定性在 控制上存在一定的矛盾袁 需要通过控制器协调两者的控制程度遥 鉴于此袁主动悬架协调控制技术研究很有必要遥
粤遭泽贼则葬糟贼:The coordination problems of the vertical vibration control and the lateral tilt control exist in the suspension system under the steering condition of the car. it puts forward the active suspension coordinated control strategy based on functional allocation袁 and vertical vibration controller袁 side tilt roll controller袁 coordinated controller are designed. W ith the help of coordinated controller袁 the function allocation of the vertical motion controller and the side-tilting controller is performed. In the implementation process of control strategy袁 the vehicle dynamics model is established based on A dams袁 and control system designed in the Simulink袁 then active suspension integrated vehicle joint simulation platform built in Adams/Simulink. Through the car two degrees of freedom linear model袁 the feasibility of the platform is verified. The simulation experiments of the two working conditions of linear driving and angle step are carried out on C-level pavement and the algorithm is verified. The results show that the active suspension control system with the coordination controller can coordinate the vertical controller and the side-tilt controller袁 and the comprehensive performance of the vehicle improved. Key Words院Active Suspension曰 Adams/Simulink曰 Coordination Control曰 Fuzzy Control
The Research of Coordination Control Technology on Vehicle Active Suspension
WANG Wei-qiang袁 LIU Ying
渊 Wuhan University of Science and Technology袁 School of Automobile and Traffic Engineering袁 Hubei Wuhan 430081袁 China冤
2 七自由度主动悬架整车动力学模型
第 10 期
机械设计与制造
圆园19 年 10 月
酝葬糟澡蚤灶藻则赠 阅藻泽蚤早灶 驭 酝葬灶怎枣葬糟贼怎则藻
123
车辆主动悬架协调控制技术研究
王维强袁刘 颖
渊 武汉科技大学汽车与交通工程学院袁湖北 武汉 430081冤
摘 要:为解决汽车转向工况下悬架系统垂向振动控制和侧倾控制存在的协调问题袁提出了基于功能分配的主动悬架协 调控制策略袁设计了垂向运动控制器尧侧倾控制器和协调控制器袁通过协调控制器对垂向运动控制器和侧倾控制器进行 功能分配遥 在控制策略的实现过程中袁 利用 Adams 建立整车动力学模型袁 在 Simulink 中设计控制系统袁 搭建 Adams/ Simlink 主动悬架整车联合仿真平台袁并通过汽车二自由度线性模型验证该平台的可行性遥 在 C 级路面上进行了直线行 驶和角阶跃输入两种工况的仿真实验袁对算法进行验证遥 结果显示袁通过协调控制器进行功能分配的主动悬架控制系统袁 能很好的协调垂向控制器和侧倾控制器袁提高了汽车的综合性能遥 关键词:主动悬架;Adams/Simulink;协调控制;模糊控制 中图分类号:TH16曰U461 文献标识码院A 文章编号院员园园员-3997渊 圆园19冤 10-0123-04