KK _ 飞行控制板v5.5 _ 原理图
KK中文说明书_Rev05
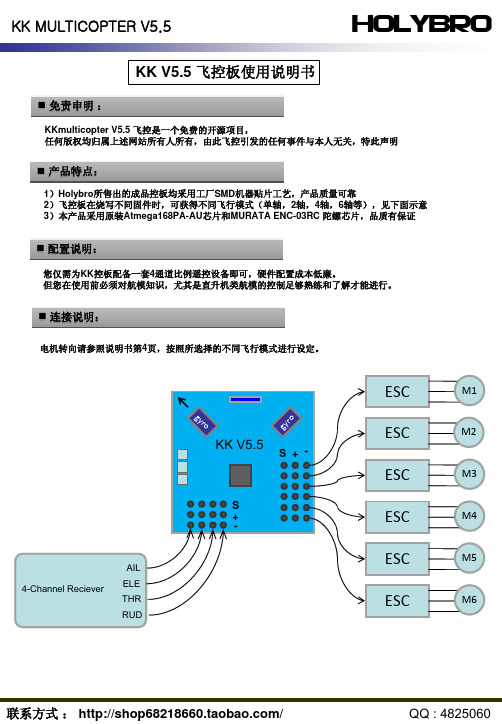
KK V5.5 飞控板使用说明书免责申明:KKmulticopter V5.5飞控是一个免费的开源项目,任何版权均归属上述网站所有人所有,由此飞控引发的任何事件与本人无关,特此声明产品特点:1)Holybro所售出的成品控板均采用工厂SMD机器贴片工艺,产品质量可靠2)飞控板在烧写不同固件时,可获得不同飞行模式(单轴,2轴,4轴,6轴等),见下面示意3)本产品采用原装Atmega168PA-AU芯片和MURATA ENC-03RC 陀螺芯片,品质有保证 配置说明:您仅需为KK控板配备一套4通道比例遥控设备即可,硬件配置成本低廉。
但您在使用前必须对航模知识,尤其是直升机类航模的控制足够熟练和了解才能进行。
连接说明:电机转向请参照说明书第4页,按照所选择的不同飞行模式进行设定。
调试说明:以下调试说明均以韩版固件为例,德版固件电位器调节方向和韩版相反,如您使用德版固件,请勿参照如下说明。
本产品默认固件是韩版4轴‘十’字模式2.1版,初次飞行前请按如下说明校准1. 设定发射机通道正反向开关通道副翼升降舵油门方向舵JR/SPEKTRUM REVERSE REVERSE NORMAL REVERSE FUTABA NORMAL NORMAL REVERSE NORMALHITEC NORMAL REVERSE NORMAL NORMAL* 注意: 确保关闭发射机上的所有混控功能7. 使用发射机设定飞行模式-如果你的飞控不能顺利解锁,请调低几格发射机油门微调试试-普通模式:50%舵量(出厂默认解锁时为普通模式)-运动模式: 更大的舵量发应,70%舵量.-UFO模式: 更快速的方向旋转。
方向舵量90%,其他舵面50%。
-初学飞行时,建议将副翼和升降舵量设定为50%(D/R值)8. 飞行模式示例(通过刷写不同固件实现,一次刷写只能使用一种模式)。
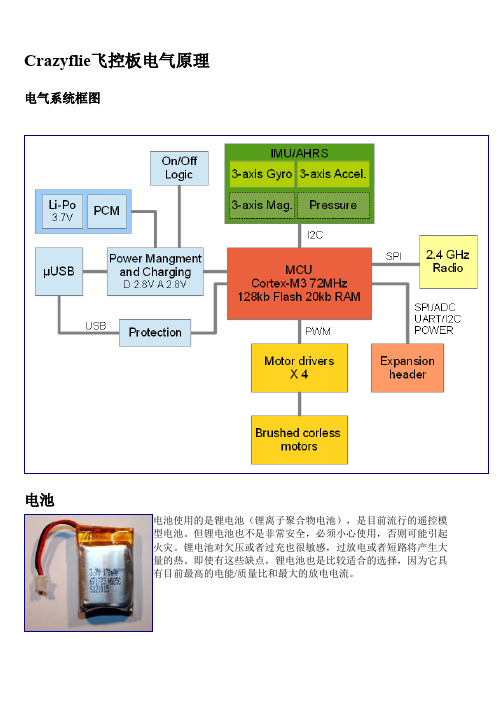
Crazyflie飞控板电气原理
产品规格:
型号
电压 (V)
671723HS25C 3.7
容量 (mAH)
170
厚度 (±0.2)
6.9
宽度 高度 质量 (±0.5) (±0.5) (g)
17 23
3.9
充电率
连续放电率
突发 (≤5S)
1C-5C 25C (≥ 80%) 50C
电源连接头 我们在电池侧使用的是 JST-ZHR-2P 连接头。根据它的规格只能连续通过 1A 的电流,但在若干次 4A 的测试中并未发现任何问题。我们测试此连接头的接触电阻为 4 欧,即使在消耗电流大约 1.4A 的悬停状态和其他更多的突发电流,所以我们选择此连接头。
PCM
为了应付锂电池的这些缺点,我们使用电路保护模块(PCM)来防止电量不足、过放电或者短路。 PCM 位于电池上部的橙色胶带下面,从中引出两条电源线。
PCM 的参数如下:
条目 过充电检测电压 过充电解除电压 过充电检测延时 过放电检测电压 过放电解除电压 过放电检测延时 过放电电流 过放电电流延时 短路检测延时 短路解除条件 损耗电流 建议最大连续充/放电电流 建议使用温度 内阻
扩展口分为两部分。pin1 到 pin10 是 JTAG 部分, pin11 到 pin20 是总线/电源部分。UART 的 RX/TX 位 于 JTAG 部分,因为很多基于 JTAG 的 FTDI 可以用作 串口通讯,这在调试的时候非常方便。
接口描述
接口
名字
描述
1
VCC
数字电源
2
TMS
测试模式使能
MCU
微控制器(MCU),Crazyflie 的大脑,我们使用的是 ST Microelectronics 的 STM32F103CB。实 际上我们在 2009 年就选择了此 MCU,现在已经非常普遍被电子爱好者和其他无人机平台使用。 我们的 STM32F103CB 运行在 72MHz 的全速状态,它具有 128KB 的 Flash 和 20KB 的 RAM。截至 2012 年 12 月,我们的固件需要 46KB 的 Flash 和 16KB 的 RAM。RAM 绝对可以更加的优化,以 便有足够的空间来实现更多的算法和有趣的东西。我们使用了其处理能力的 40%左右(包含了一 个 500Hz 的更新循环)和大段的空闲,因为我们使用了一个“阻塞式”的 I2C 驱动。
飞机飞行控制课件

特点:智能化、自动化、高 精度、高可靠性
应用场景:无人机在军事、 农业、物流、救援等领域的 应用
发展趋势:智能化、网络化、 小型化、低成本化
航天飞行控制系统
航天飞行控制系 统是飞机飞行控 制系统的重要组 成部分
航天飞行控制系 统主要用于控制 航天器的姿态、 轨道和速度
航天飞行控制系 统可以保证航天 器在太空中的稳 定飞行和精确定 位
计算机技术
飞行控制计算机: 负责处理飞行控 制指令和传感器 数据
飞行控制算法: 实现飞行控制功 能,如姿态控制、 导航控制等
传感器技术:提供 飞行状态和外部环 境信息,如加速度 计、陀螺仪等
通信技术:实现飞 行控制计算机与传 感器、执行器之间 的数据传输和通信
导航技术
惯性导航系统(INS):利用陀 螺仪和加速度计等传感器测量飞 机的加速度和角速度,计算飞机 的位置和姿态。
法规限制:技术创新需要遵守相关法规 和标准,确保产品的合法性和安全性
合作与交流:加强与行业内外的合作 与交流,共同应对技术创新的挑战和 应对策略
安全保障的挑战和应对策略
挑战:飞机飞行控制系统的安全性要求 越来越高
应对策略:加强飞机飞行控制系统的测 试和验证,确保系统的稳定性和可靠性
应对策略:加强飞机飞行控制系统的安 全性设计,提高系统的可靠性和稳定性
早期的飞行控制系统20世纪源自,飞机开始使用 机械式飞行控制系统,如操 纵杆、舵面等
20世纪30年代,飞机开始 使用液压式飞行控制系统,
提高了控制精度和稳定性
19世纪末,莱特兄弟发明 了飞机,开启了飞行控制系 统的发展历程
20世纪50年代,飞机开始 使用电动式飞行控制系统,
实现了自动化控制
现代的飞行控制系统
四轴飞行器飞行中文版国外控制板手册

/ 7
MikroKopter 四轴飞行器
• 用于和无刷电调通信的 I2C 总线 整个连接组装的细节参见 ElektronikVerkabelung……
第 6 步:控制 MikroKopter(概要) 上电
第 3 步用 MikroKopter Tool(avrdude)编程
用我们的串口转换装置(SerCon)非常容易对单片机编程,它已经包含了一个 ISP 电路。电脑必须拥有 一个真正的串口用于编程。USB 转串/并口转换器或类似的转换器肯定不会工作!串口转换装置用排线连 接到 6 针插头上。转换装置上的 LED 状态无关紧要。飞行控制板必须加电压才能进行编程。 还可以用 AVR ISP mkII 通过 USB 为单片机编程。参见 USB-AVRISPmkII 的介绍。另外一种在后期用 USB 进行数据通讯的方式是 USB-TTL-232 adaptor。 飞行控制板现在也有了 boot loader 程序。你可以在 MikroKopterTool 找到编程的方法。
MikroKopter 四轴飞行器
飞行控制板 V1.0:电路图、零件焊接和入门
由 Timer 根据 french-copter 的英文版译出。请勿商业使用。转载请注明出处。 任务
该板是 MikroKopter 四轴飞行器的控制板。它可以实现下列任务: • 测量三轴角速度 • 测量三轴加速度数据 • 测量大气压力,用于高度控制 • 接收数字罗盘信号 • 测量电池电压 • 接收 R/C 信号 • 处理传感器数据以及计算真实角位置 • 驱动四个无刷电调
接口
控制板通过不同的接口与外部世界通讯。
PPM 输入
1-kk
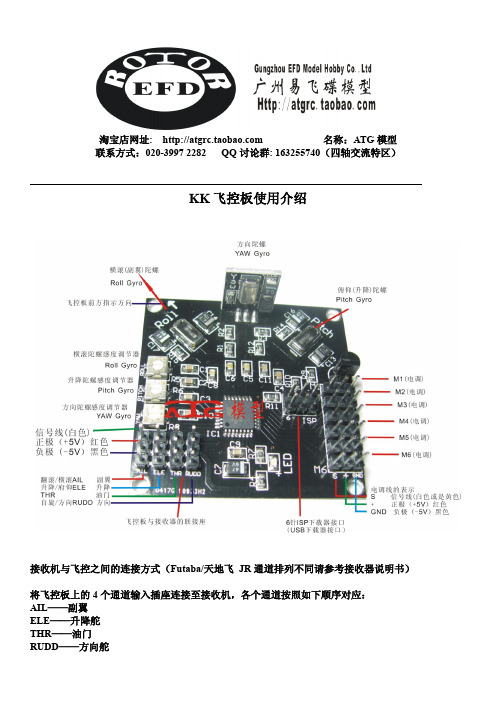
淘宝店网址: 名称:ATG模型联系方式:020-3997 2282 QQ讨论群: 163255740(四轴交流特区)KK飞控板使用介绍接收机与飞控之间的连接方式(Futaba/天地飞JR通道排列不同请参考接收器说明书)将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵四轴飞行架飞控板(十字或X)指向固定,各电机、电调的排列和正、反桨安装正桨:在螺旋桨的边缘有1045或者8045的字样分别为1045正桨或者8045正桨反桨:在螺旋桨的边缘有1045 R或者8045 R的字样分别为1045反桨或者8045反桨十字程式:M1-表示机头方向的电机与电调相联,各电调按方向接在飞控板M1-M4位置(请核对电调的正负极和信号线,一般黑色为负极(GDN)红色为(+) 白色为信号线(S)。
电调输出线接错正负极到飞控板会损坏电调或是飞控板。
红色箭头是指十字程式飞控板,固定在机架后飞控板上箭头指向M1轴臂方向,不同飞行程式飞控板指向安装固定不一样。
X字程式:M1-和M2表示机头方向,各电机与电调相联后电调按方向接在飞控板M1-M4位置(请核对电调的正负极和信号线,一般黑色为负极(GDN)红色为(+) 白色为信号线(S)。
电调输出线接错正负极到飞控板会损坏电调或是飞控板。
红色箭头是指X字程式的飞控板,固定在机架后飞控板上箭头指向M1和M2轴臂之间,不同飞行程式飞控板指向安装固定不一样。
电机与电调的接线(只供参考,电机与电调不同品牌有不同,请以实际使用产品说明书为准)十字程式:M 1和M 4位置(反桨)图中电机与电调线红/黄/黑对称连接十字程式:M 2和M 3位置(正桨)图中黄对黄/红/黑对换连接X字程式:M 1和M 3位置(反桨)图中电机与电调线红/黄/黑对称连接X字程式:M 2和M 4位置(正桨)图中黄对黄/红/黑对换连接每次连接新的遥控设备或者更换电机/电调来使用时,都需要对飞控板做一次基本设置。
KK多旋翼飞行控制板的调试安装
KK多旋翼飞行控制板的调试安装AIL是 翻滚/横滚/副翼ELE 是 升降/俯仰THR 是 油门RUDD 是自旋/偏航/方向飞行前的检查和调整:1.发射机油门调整1.)打开发射机和飞控电源2.)在三轴模式和四轴模式的固件中,需要解锁后才能控制飞控板!解锁步骤如下(1)遥控器油门最低,开关打开;飞控板通电,板上的LED灯闪一下熄灭,这样说明飞控板工作正常(2)日本手(右手油门)解锁:油门保持最低,把方向摇杆向右打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左打到底试试(3)美国手(左手油门)解锁:油门保持最低,把方向摇杆向右下打到底,停2秒,板上的LED灯常亮,表示顺利解锁飞控板。
如果方向摇杆设置反向,则向左下打到底试试)3.)如果无法完成解锁,请将油门通道的微调往下调一点再重复解锁步骤 2.设置发射机ATV/舵机信号行程范围(实际上就是调整发射机各个通道遥控信号的脉宽)Pitch/Elevator(俯仰):50%Roll/Aileron(横滚): 50%Yaw(rudder): 100%初始化的陀螺仪感度(增益gain)是50%,增大感度会造成四轴快速振荡,快速飞行需要减小陀螺仪的感度,但过低的感度也会造成操控困难或者四轴翻倒 3.电调油门行程/范围设置(千万不能装桨,以免发生意外)1.) 将飞控板电源断开,把YAW电位器旋转到底(德版固件及韩版2.5(包含2.0、2.1、2.2、2.3、2.4)版本固件逆时针拧,韩版1.5、1.6、1.7固件顺时针拧)2.)打开发射机电源3.)发射机油门手柄推到最大(满油门)4.)打开飞控板电源5.)德版固件:飞控板LED灯会快速闪动数下后熄灭。
约2秒后,听到电机发出滴滴两声后不再发声。
韩版固件:接通飞控板电源后LED灯会快速闪动数下后熄灭,隔一会儿LED会再次快速闪动数下后熄灭。
6.)这时快速把油门拉到最低,电调会发出哔哔声来回应。
KK V5.5安装调试操作
接收机与飞控之间的连接方式将飞控板上的4个通道输入插座连接至接收机,各个通道按照如下顺序对应:AIL——副翼ELE——升降舵THR——油门RUDD——方向舵◆感度调整旋钮飞控板带有3个电位器旋钮,根据不同的使用情况有两种功能:·基本设置;开机时如果某个旋钮或者全部旋钮处于最小位置(逆时针方向转到底),则会进入对应的设置项目。
·调整三个轴向陀螺仪的感度;正常使用时,逆时针方向旋转为减小感度,顺时针方向旋转为增大感度,如下图所示:左边的旋钮位置表示方向舵(YAW)感度为最小,中间的旋钮位置表示升降舵(PITCH)感度为50%,右边的旋钮位置表示副翼(ROLL)感度为最大。
每次连接新的遥控设备或者电调来使用时,都需要对飞控板做一次基本设置。
基本设置主要包含以下步骤1~4:1.设置遥控器通道的正反向;2.通道中立点校准;3.设置陀螺仪修正方向;4.油门行程校准;5.清除所有设置参数(通常无需使用此功能);6.调整陀螺仪感度;7.用遥控器设置启动模式。
请在遥控器上新建一组模型数据(如果遥控器有此功能的话),或者清除所有遥控器设置参数后再设置通道正反向,然后按照上表中的正反参数来调整您的遥控器,如果您的遥控器品牌不在上述表格中,那就需要通过自行测试来确定每个通道的正反状态。
请注意不要打开遥控器的任何混控功能,否则会导致输入飞控的信号不正确。
连接好所有设备后,即可开始进行如下设置。
请在确保所有设置完成前先不要安装螺旋桨,避免受伤!2.通道中立点校准。
中立点校准指的是让飞控的3个通道(除油门外)认准对应遥控器通道的中立点信号,避免因遥控器本身信号的误差导致飞行出现误动作。
-将PITCH旋钮调整到0位置(逆时针旋转):-把遥控器的所有微调调整到中间位置;-系统通电;-等待飞控LED快闪3次,表示进入中立点校准功能;-确认接收机正常收到遥控器信号后继续等待几秒钟;-等待飞控LED慢闪1次,表示识别并保存中立点信号;-信号中立点校准完成,断电并把PITCH旋钮调整到正常位置(一般是中点附近)。
第一章自动飞行控制系统概述ppt课件
事实上,波音737飞机上AFCS的驾驶盘操纵(CWS)方式也是一种 电传操纵。
电传操纵又是以主动增稳控制技术发展起来的。如果不从余度和 备份手段方面去考虑,当今的自动飞行控制系统、电传操纵或电 传飞行控制系统之间很难找出明确的界限。
在日常生活中,随处都可以看到浪费 粮食的 现象。 也许你 并未意 识到自 己在浪 费,也 许你认 为浪费 这一点 点算不 了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
自动飞行控制系统是在20世纪60年代中逐步发展起来的,70年 代是模拟式AFCS盛行的时代,80年代开始了AFCS从模拟式向数 字式过渡。
1.1
自动飞行控制系统的发展 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
1.1.2 从自动驾驶仪到自动飞行控制系统
20世纪60年代以前的自动驾驶仪均以舵机回路(舵机是指在自动驾驶仪中 操纵飞机舵面(操纵面)转动的一种执行部件)的稳定系统为主,配合较 少的输入指令(如转弯、升降、高度保持等)去操纵飞机。
随着计算机技术和信息综合化技术的发展,数字式的AFCS开始 和飞行管理计算机系统(FMCS)结合工作。在飞行管理计算机 统一管理下的自动飞行控制系统和自动油门配合,实现对飞机 的自动控制和对发动机推力的自动控制。
1.1.2 从自动驾驶仪到自动飞行控制系统 在日常生活中,随处都可以看到浪费粮食的现象。也许你并未意识到自己在浪费,也许你认为浪费这一点点算不了什么
为了防止电磁干扰传输电缆,FBW(电传飞行控制)采用双绞线 和屏蔽接地等技术,但尚不能完全抑制意外的电磁和电击干扰, 在此问题上光传输具有极好的防护性能。用于光传输的辅助操纵 系统和发动机控制系统都已研制成功并投入实践应用。
“KK”飞控板系列飞行器的制作
“KK”飞控板系列飞行器的制作作者:一也来源:《航空模型》2011年第09期“KK”飞控板是一款开源的飞行控制模块,其对硬件要求低、价格相对便宜,虽然功能有限,却受到越来越多模友的关注。
笔者此前曾以“MK”飞控板为控制单元制作过一款四轴飞行器(参阅《航空模型》2010年第9期《一款四轴飞行器的制作》一文),看到最近网上流行采用“KK”飞控板的四轴飞行器,于是也决定用它制作一组。
掌握了“KK”飞控板的功能后,笔者将它与以前使用的“MK”飞控板做了比较。
由于“MK”飞控板用加速度计和陀螺仪测量四轴飞行器的姿态,而“KK”飞控板只用陀螺仪进行姿态增稳,因此前者在飞行控制上更加稳定;在硬件支持上,“KK”飞控板要求更低,以电调为例,“MK”飞控板只支持IIC数字接口的专用高速电调,“KK”飞控板则能支持市面上常用的普通电调。
与“MK”飞控板相比,“KK”飞控板的主要优点有:1.价格低廉,结构简单,维修、调试容易;2.飞控板载3个陀螺,可用电位器调整陀螺感度;3.全舵机信号输出,支持普通商品电调与模拟舵机;4.通过不同的结构布局与相应的调试程序,能支持三轴、四轴、六轴等多种飞行模式(其中,四轴有“+”和“×”等飞行模式,六轴有“Hex6”和“Y6”等飞行模式,图1~图5);5.可与接收机直接连接,而不用像“MK”飞控板那样另配PPM解码板;6.以其为控制单元制作的飞行器,其操控方式类似单旋翼模型直升机,主要依靠手工操控,飞行器可做空翻、“刷锅”等特技动作。
下面为大家介绍笔者以“KK”飞控板为控制单元制作的三轴与四轴飞行器,以三轴飞行器的制作与调试为主。
一、制作机架两款飞行器的机架都设计成可折叠式,便于携带。
机架的主要零件以市面上常用的一些材料为主,购买容易、价格低廉、加工方便。
四轴飞行器为“×”结构布局,使用4个无刷电机和4个电调。
具体制作过程如图6~图12所示。
三轴飞行器机架的制作与四轴飞行器基本类似,唯一不同的是:因三轴飞行器为“Y”形结构(图13、图14),其控制方式与四轴飞行器有所区别。
飞机飞行控制系统
飞机飞行控制系统飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。
3.4.1. 飞行控制系统概述飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。
由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。
最简单的人工飞行控制系统就是机械操纵系统。
不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。
自动驾驶仪是最基本的自动飞行控制系统。
飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。
控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。
传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。
飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。
作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。
自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。
信息传输链用于系统各部件之间传输信息。
常用的传输链有电缆、光缆和数据总线。
接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。
图3.4.1 飞行控制系统基本原理飞控系统基本工作原理除个别的开环操纵系统(如机械操纵系统)外,所有的飞控系统都采用了闭环反馈控制的工作原理。
图3.4.1是通用的飞控系统基本工作原理框图。