过程控制 第四章 复杂过程控制系统-比值控制4
第4章(比值、均匀、前馈)过程控制课件

Q
0
t
第二种情况, 第二种情况 控制器的K c 很小 即控制作用很弱 当干 很小, 即控制作用很弱, 扰使液位大幅波动时, 阀门开度基本不变, 则流量的波 扰使液位大幅波动时 阀门开度基本不变 动就很小. 如下左图所示. 第三种情况, 动就很小 如下左图所示 第三种情况 控制器的 K c H Q H Q H 取值适当, 使 取值适当 H H0 H0 控制作用较为 Q0 Q0 Q Q 温和, 温和 在干扰
(三)双冲量均匀方案 三 双冲量均匀方案 “冲量”的原义是短暂作用的信号或参数 在此引 冲量” 冲量 的原义是短暂作用的信号或参数, 申 为连续的信号或参数. 为连续的信号或参数 双冲量均匀控制系统的结构见下 图. 与串级均匀控制相比 前者用一个加法器取代主控 与串级均匀控制相比, 制器, 制器 是以液位和流量的测量信号经加法器后 甲塔 作为系统的被控变量. IO QS 作为系统的被控变量 现假定采 IH ∑ QC 用电动仪表构成系统 阀门为气 用电动仪表构成系统, I S IQ 开式, 流量控制器选正作用. 开式 流量控制器选正作用 加 h 法器在稳定状态下的输出为: 法器在稳定状态下的输出为
下图表示两个串联的精馏塔独立设置控制系统. 两个独立 下图表示两个串联的精馏塔独立设置控制系统. 两个独立 运行的单回路液位控制系统 乙塔 甲塔 和流量控制系统工作时是相 QC LC 互矛盾的. 为解决矛盾, 可 互矛盾的 为解决矛盾 在两塔之间增设中间缓冲容 器来克服, 器来克服 但这增加了投资 且对于某些生产连续性很强 的过程又不允许中间储存的时间过长, 的过程又不允许中间储存的时间过长 因 此还需从自动化方案的设计上寻求解决的 甲塔 方法. 均匀控制就是一种解决方案. 方法 均匀控制就是一种解决方案 均匀 LC 控制系统把液位﹑ H 控制系统把液位﹑流量统一在一个控制系 统中, 如左图所示. 所谓均匀控制系统是 统中 如左图所示 所谓均匀控制系统是 指两个工艺参数在规定范围内能缓慢地﹑ 指两个工艺参数在规定范围内能缓慢地﹑ 均匀地变化 Q 均匀地变化, 使前后设备在物料供求 上相互兼顾﹑均匀协调的系统. 上相互兼顾﹑均匀协调的系统
DCS控制系统基础知识

DCS是计算机技术、控制技术和网络技术高度结合 的产物。DCS通常采用若干个控制器(过程站)对一个生 产过程中的众多控制点进行控制,各控制器间通过网络连 接并可进行数据交换。操作采用计算机操作站,通过网络 与控制器连接,收集生产数据,传达操作指令。因此, DCS的主要特点归结为一句话就是:分散控制集中管理。
第四阶段:第四代DCS系统,2000年以后
第四代DCS的体系结构主要分为四层结构:现场仪表层、控制装置单 元层、工厂(车间)层和企业管理层。一般DCS厂商主要提供除企业管理 层之外的三层功能,而企业管理层则通过提供开放的数据库接口,连 接第三方的管理软件平台(ERP, CRM, SCM等)。所以说,当今DCS主要 提供工厂(车间)级的所有控制和管理功能,并集成全企业的信息管理 功能。例如以Honeywell公司最新推出的Experion PKS(过程知识系统)、 Emerson公司的P1antWeb (Emerson ProcessManagement), Foxboro公 司A2、横河公司的R3 (PRM-_-C厂资源管理系统)和ABB公司的 Industrial IT系统。
第三节 CENTUM-CS控制系统的构成字母代号
集散控制系统基本构成图
CENTUM-CS系统外观图
DCS组成结构
DCS的过程控制站是一个完整的计算机系统,主 要由电源、高性能的中央处理器(CPU)、网络接口 组成。
高性能的中央处理器是现场过程控制的中心, 存放并运行所有的过程控制程序以及现场仪表数据 和控制数据。DCS的控制决策都是由它来执行的。
执行器
接受控制器的输出信号,直接控制能量或物料等调节介质的输 送量,达到控制温度、压力、流量、液位等工艺参数的目的。 测量变送器
过程控制讲义课件(全套)
29
1.4 过程控制系统的分类
6. 按给定信号的特点分类 : 定值控制系统 程序控制系统 随动控制系统
(1)定值控制系统:就是系统被控量的给定值保持在规定 值不变,或在小范围附近不变。定值控制系统是过程控 制中应用最多的一种控制系统,因为在工业生产过程中 大多要求系统被控量的给定值保持在某一定值,或在某 很小范围内不变。 例如过热蒸汽温度控制系统、转炉供氧量控制系统 均为一个定值控制系统。
30
1.4 过程控制系统的分类
(2)程序控制系统:它是被控量的给定值按预定的时 间程序变化工作的。控制的目的就是使系统被控量按 工艺要求规定的程序自动变化。 例如同期作业的加热设备(机械、冶金工业中的热 处理炉),一般工艺要求加热升温、保温和逐次降温 等程序,给定值就按此程序自动地变化,控制系统按 此给定程序自动工作,达到程序控制的目的。
4. 按被控制量的多少分类:
单变量控制系统 多变量控制系统
25
1.4 过程控制系统的分类
5. 按系统的结构分类:
反馈控制系统 前馈控制系统 复合控制系统 单回路控制系统 串级控制系统
26
1.4 过程控制系统的分类
(1)反馈控制系统
它是过程控制系统中的一种最基本的控制结构形 式。反馈控制系统是根据系统被控量的偏差进行工作 的,偏差值是控制的依据,最后达到消除或减小偏差 的目的。如过热蒸汽温度控制系统就是一个反馈控制 系统。另外,反馈信号也可能有多个,从而可以构成 多个闭合回路,称其为多回路控制系统。
23
1.4 过程控制系统的分类
1. 按被控量分类 :
温度控制系统 压力控制系统 流量控制系统 液位控制系统等
2. 按完成的功能分类:
复杂过程控制系统--串级控制

W *02 (s)W01 (s) Y1 (s) = F2 (s) 1+WC1 (s)W'02 (s)W01 (s)Wm1 (s)
Company Logo
对于一个控制系统来说,当它在给定信号作用 下,其输出量能复现输入量的变化,即Y1(s)/X1(s) 越接近于1时,则系统的控制性能越好;当它在扰 动作用下,其控制作用能迅速克服扰动的影响,即 Y1(s)/F2(s)越接近于0时,则系统的控制性能越 好,系统的抗干扰能力就越强。 图4-5串级控制系统抗干扰能力可用下式表示: Y1 (s)/X 1 (s) WC1 (s)W'02 (s) QC2 (s) = = = WC1 (s)WC2 (s)WV (s) Y1 (s)/F2 (s) W *02 (s)
Company Logo
(三)对一次扰动有较好的克服能力
对串级控制系统: Y1 (s)
W01 (s) = F1 (s) 1+WC1 (s)W'02 (s)W01 (s)Wm1 (s)
Байду номын сангаас
抗扰动能力:
Y1 (s)/X 1 (s) QC1 (s) = = WC1 (s)W'02 (s) Y1 (s)/F1 (s)
Company Logo
(一)改善了被控过程的动态特性
Company Logo
副回路闭环传递函数
WC2 (s)WV (s)W02 (s) Y2 (s) W02 (s) = = X 2 (s) 1+ WC2 (s)WV (s)W02 (s)Wm2 (s)
'
设W02(s)=K02/(T02s+1),Wc2(s)=Kc2, ' Wv(s)=Kv,Wm2(s)=Km2,可得 ' K02 W02 (s) = ' T02 s + 1 ' 式中 K 02 ----等效被控过程的放大系数 ' T02 ----等效被控过程的时间常数
解析化工生产中复杂过程控制系统的控制方案的选择与运用
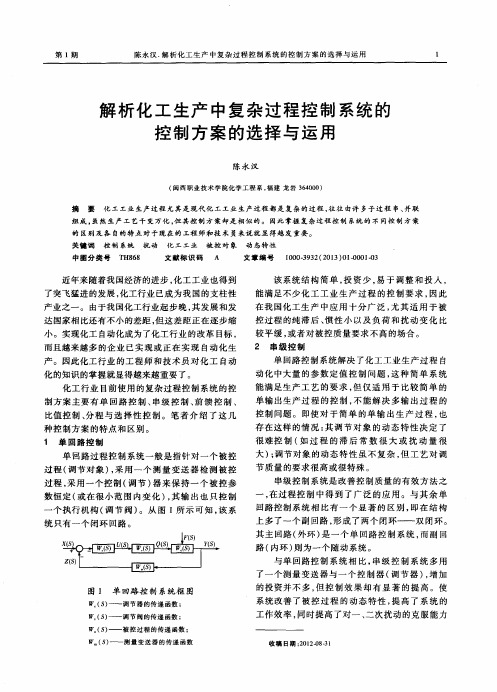
该 系统结 构 简 单 , 投资少, 易 于 调整 和投 人 ,
能 满足 不少化 工 工 业 生 产 过程 的控 制要 求 , 因 此 在我 国化 工生 产 中应 用 十分 广 泛 , 尤 其 适 用 于被 控 过程 的纯滞 后 、 惯 性 小 以及 负荷 和扰 动 变 化 比 较 平缓 , 或者 对被 控质 量要 求不高 的场 合 。
一
子 系统 方案 可 以不 相 同 , 子 系 统 方 案之 间也 可 采
用 不相 同 的方 案 。各 种控 制 方 案 各 有 特 色 , 各 自
都具 备 其他 方案 所 不 具 备 的优 势 , 同 时又 有 自己
的不足 之处 。总 之 , 在 化 工 生 产 中这 几 种 控 制 方
1 单 回 路 控 制
单 回路控 制 系统解决 了化工工 业生 产过 程 自 动 化 中大量 的参 数 定 值 控 制 问题 , 这 种 简 单 系 统 能满 足 生产 工艺 的要 求 , 但 仅 适 用 于 比较 简 单 的 单 输 出生产 过 程 的控 制 , 不 能 解 决 多输 出过 程 的 控 制 问题 。即使 对 于 简单 的单 输 出生 产 过 程 , 也 存 在这 样 的情况 : 其调 节 对 象 的 动态 特 性 决 定 了 很 难控 制 ( 如 过 程 的滞 后 常 数 很 大 或 扰 动 量 很 大) ; 调节 对 象 的动态 特 性 虽 不 复杂 , 但 工 艺 对 调 节质量 的要 求很 高或很 特殊 。 串级控 制系 统是 改善控 制质 量 的有效方 法 之
在 现代 化工 工业 生 产 过 程 中 , 许 多情 况 下 会 要 求两 种或 多种 物 料 流 量成 一 定 比例关 系 , 一 旦
培训课件过程控制 第四章 复杂过程控制系统-比值控制4.ppt

0.0
5
自动化仪表与过程控制
§4-4-2 比值控制系统的结构类型
0.0
6
自动化仪表与过程控制
§4-4-2 比值控制系统的结构类型
3、工作过程 • 稳定状态下…… • 主动量变化时…… • 从动量由于干扰而变化时……
4、优缺点 优点:不但能实现从动量跟随主动量变化,而且能
克服从动量本身干扰对比值的影响等。 缺点:主动量不受控。
• 在有些生产过程中,要求两种物料流量的比值随第 三个变量的变化而变化。
•为了满足上述生产工艺要求,开发并应用变比值控制。 2、系统结构:如下图所示 3、变比值控制的含义
变比值控制系统是一个以第三个变量为主变量(质量 指标)、以两个流量比为副变量的串级控制系统。
0.0
10
自动化仪表与过程控制
§4-4-2 比值控制系统的结构类型
0.0
14
§4-4-3 比值控制系统设计
自动化仪表与过程控制
② 将对生产负荷起关键作用的物料流量作为主动量。 ③ 从安全角度出发,分析两种物料流量分别在失控情况 下,看哪一种情况必须保持比值一定,就将这种情况下的 那种物料流量作为主动量较为合适。
0.0
15
§4-4-3 比值控制系统设计
自动化仪表与过程控制
自动化仪表与过程控制
第四章 复杂过程控制系统
§4-4 比值控制 §4-4-1 比值控制原理 §4-4-2 比值控制系统的结构类型 §4-4-3 比值控制系统设计 §4-4-4 比值控制系统整定 §4-4-5 应用举例
0.0
1
§4-4-1 比值控制原理
自动化仪表与过程控制
一、方法的产生
在现代工业生产过程中,要求两种或多种物料流量成
第四章 计算机控制系统常用的控制规律
积分控制量腾出作用空间 。
PI控制器可清除系统静差
3、比例、积分、微分(PID)控制器
➢ PI控制器虽然可以消除静差,但它是以降低响应速度为代 价的,而且Ti越大,代价越高。
➢ 在实际控制系统中,人们不但要求静差可以为0,而且还要 求有尽可能快地实现抑制静差出现的能力,或者说希望超前消 除静差。即在静差刚出现还没有发生作用,就立即消除。
当主要干扰无法用串级控制使其包围在副回路内时,采用前 馈控制将会比串级控制获得更好的效果。
➢微分先行PID控制算法 结构框图为:
控制算式为:
U(s)Kp1T1isE(s)
u(k) Kp( e k) e(k1)KpTTis( e k)-KTpTd c(k)2c(k1)c(k2) -KpTd c(k)c(k1)
Ti
四、数字PID控制器参数的整定 ● 采样周期的选择
► 对于响应快、波动大、容易受干扰影响的过程,应该选取 较短的采样周期;反之,则长一些。
➢前馈控制算法
实现完全补偿的前馈控制为:GM
(s)
GD (s) G(s)
若: 前馈控制器为:
G D (s)1 K T 11se 1s
, G (s)K 2 e 2s 1T 2s
G M ( s ) M V ( ( s s ) ) G G D ( ( s s ) ) K K 1 2 ( ( 1 1 T T 2 1 s s ) ) e ( 1 2 ) s K m 1 1 T T 1 2 s s e fs
位置式PID的输出不仅与本次偏 差有关,而且与历次测量偏差有 关,计算时要对误差累加,计算 机运算工作量大。
● 增量式PID控制算式
过程控制-第4章 复杂控制系统
第五章复杂控制系统钱厚亮南京工程学院工业中心2013/01一、串级控制系统二、均匀控制系统三、比值控制系统四、前馈控制系统复杂控制系统定义:通常复杂控制系统是多变量的,具有两个以上变送器、两个以上控制器或两个以上控制阀所组成的多个回路的控制系统,所以又称为多回路控制系统。
常见的复杂控制系统有串级、均匀、比值、分程、三冲量、前馈、选择性等系统。
4.1 串级控制系统一、串级控制系统概述目的:①可延长炉子寿命,防止炉管烧坏;②可保证后面精馏分离的质量。
为了控制炉出口温度,可以设置一个简单控制系统。
PID反作用气开由于炉子的控制通道容量滞后很大,反应缓慢,控制精度低,但是工艺上要求炉出口温度的变化范围为±(1~2)℃。
上图的单变量单回路控制系统是难以满足的。
串级控制系统简单控制系统1.串级控制系统的组成串级控制系统定义:由两个测量变送器、两个控制器其中一个控制器的输出是另一个控制器的给定、一个控制阀组成的双闭环定值系统.2.串级控制系统中常用的名词主被控变量(Yl):是工艺控制指标或与工艺控制指标有直接关系,在串级控制系统中起主导作用的被控变量。
副被控变量(Y2):大多为影响主被控变量的重要参数。
主控制器:在系统中起主导作用,按主被控变量和其设定值之差进行控制运算,并将其输出作为副控制器给定值。
副控制器:在系统中起辅助作用,按所测得的副被控变量和主控输出之差来进行控制运算,其输出直接作用于控制阀的控制器,简称为“副控”。
主变送器:测量并转换主被控变量的变送器。
副变送器:测量并转换副被控变量的变送器。
主对象:大多为工业过程中所要控制的、由主被控 变量表征其主要特性的生产设备或过程。
副对象:大多为工业过程中影响主被控变量的、由副被控变量表征其特性的辅助生产设备或辅助过程。
副回路:由副变送器、副控制器、控制阀和副对象所构成的闭环回路 , 又称为“ 副环” 或“内环”。
主回路:由主变送器、主控制器、副回路等效环节、主对象所构成的闭环回路,又称为“主环”或“外环”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
§4-4-2 比值控制系统的结构类型
一、开环比值控制 1、系统组成:如下图所示
2020/7/6
西南科技大学信息工程学院
4
§4-4-2 比值控制系统的结构类型
2、特点 • 简单、成本低; • 只有当Q1变化时才起控制作用; • Q2变化时,Q1不会响应,比例关系被破坏。
3、适用场合 从动量没有干扰的情况。
2
§4-4-1 比值控制原理
二、比值控制的含义 凡是两个或多个变量自动维持一定比值关系的过程控制系统,统称为比值控制系
统。 三、变量及关系
• 主动量---起主导作用而又不可控的物料流量; • 从动量---跟随主动量而变化的物料流量; • 比例系数: K=Q2/ Q1
2020/7/6
西南科技大学信息工程学院
第四章 复杂过程控制系统
§4-4 比值控制 §4-4-1 比值控制原理 §4-4-2 比值控制系统的结构类型 §4-4-3 比值控制系统设计 §4-4-4 比值控制系统整定 §4-4-5 应用举例
2020/7/6
西南科技大学信息工程学院
1
§4-4-1 比值控制原理
一、方法的产生 在现代工业生产过程中,要求两种或多种物料流量成一定比例关系;一旦比例失调,
2020/7/6
西南科技大学信息工程学院
8
§4-4-2 比值控制系统的结构类型
3、优点 ※ 对主动量实行定值控制,克服了干扰对主、从动量的影响。 ※ 升降负荷比较方便。
4、适用场合 常用在主动量干扰频繁或工艺上不允许负荷有较大的波动,或工艺上经常需要
升降负荷的场合。 5、使用中的注意事项
† 防止从动量回路产生“共振”。 † 主、从控制器都不宜采用微分作用。
2020/7/6
西南科技大学信息工程学院
9
§4-4-2 比值控制系统的结构类型
四、变比值控制系统 1、方法的产生
• 在有些生产过程中,要求两种物料流量的比值随第三个变量的变化而变化。 •为了满足上述生产工艺要求,开发并应用变比值控制。 2、系统结构:如下图所示 3、变比值控制的含义
变比值控制系统是一个以第三个变量为主变量(质量指标)、以两个流量比为副变 量的串级控制系统。
2020/7/6
西南科技大学信息工程学院
12
§4-4-2 比值控制系统的结构类型
6、应用实例
2020/7/6
西南科技大学信息工程学院
13
§4-4-3 比值控制系统设计
一、主、从动量的选择 1、单闭环比值控制系统主、从动量的选择
(一个流量可控,另一个流量不可控) 不可控的流量作为主动量,可控的流量作为从动量。 2、双闭环比值控制系统主、从动量的选择(两个流量都可控) 可以掌握以下原则: ① 分析两种物料的供应情况,将有可能供应不足的物料流量作为主动量,供应充足 的物料流量作为从动量。
会影响生产的正常进行,影响产品质量,浪费动力,造成环境污染,甚至产生生产事故。 如:
• 燃烧过程中,往往要求燃料量与空气量需按一定比例混合后送入炉膛。 • 制药生产中要求药物和注入剂按比例混合。 • 造纸过程中为保证纸浆浓度,要求自动控制纸浆量和水量比例。 • 水泥配料系统……
2020/7/6
西南科技大学信息工程学院
2020/7/6
西南科技大学信息工程学院
16
§4-4-3 比值控制系统设计
I Q 16 4 (mA) Qm a x
则: 根据式(2)
Q (I 4) Qmax 16
K Q2 (I2 4) Q2 max 16 I2 4 Q2 max Q1 (I1 4) Q1max 16 I1 4 Q1max
15
§4-4-3 比值控制系统设计
二、比值系数的换算 要实现流量比值控制,首先就必须将工艺上的流量比值K换算成仪表上的信号比值
K’。换算方法随流量与测量信号间是否成线性关系而不同。 1、流量与测量信号成线性关系
流量检测信号经过开方器后与流量信号成线性关系。 对DDZ-Ⅲ型仪表,当流量由零变至最大值Qmax时,仪表对应的输出信号为4~20mA (DC),则流量的任一中间值Q所对应的输出电流为:
4、优缺点 优点:不但能实现从动量跟随主动量变化,而且能克服从动量本身干扰对比值的
影响等。 缺点:主动量不受控。
5、适用场合 在负荷变化不太大的场合得到广泛应用。
2020/7/6
西南科技大学信息工程学院
7
§4-4-2 比值控制系统的结构类型
三、双闭环比值控制 1、特点:能克服单闭环主动量不受控的不足。 2、系统组成:如下图所示
2020/7/6
西南科技大学信息工程学院
10
§4-4-2 比值控制系统的结构类型
2020/7/6
西南科技大学信息工程学院
11
ห้องสมุดไป่ตู้
§4-4-2 比值控制系统的结构类型
4、工作过程 •系统稳定时…… •当Q1、Q2出现扰动时…… •当出现其他扰动(如温度、压力、成分等变化)时……
5、特点 比值只是一种手段,不是最终目的,而第三变量y(t)往往是产品质量指标。
p Q 0.08 0.02 Qm a x
所以仪表比值K’为:
K K Q1max Q2 max
( Mpa )
(5) (6)
所以仪表比值K’为:
K I2 4 K Q1max
I1 4
Q2 max
2020/7/6
西南科技大学信息工程学院
(1) (2) (3)
(4)
17
§4-4-3 比值控制系统设计
对于气动单元组合仪表,当流量由零变至最大值Qmax时,仪表对应的输出信号为 0.02~0.1Mpa,则流量的任一中间值Q所对应的输出信号为:
2020/7/6
西南科技大学信息工程学院
14
§4-4-3 比值控制系统设计
② 将对生产负荷起关键作用的物料流量作为主动量。 ③ 从安全角度出发,分析两种物料流量分别在失控情况下,看哪一种情况必须保持比 值一定,就将这种情况下的那种物料流量作为主动量较为合适。
2020/7/6
西南科技大学信息工程学院
二、单闭环比值控制 1、特点: 能克服开环比值方案的不足。 2、系统组成:如下图所示
2020/7/6
西南科技大学信息工程学院
5
§4-4-2 比值控制系统的结构类型
2020/7/6
西南科技大学信息工程学院
6
§4-4-2 比值控制系统的结构类型
3、工作过程 • 稳定状态下…… • 主动量变化时…… • 从动量由于干扰而变化时……