水轮机调节系统机组孤立电网运行特性仿真1
基于MATLAB的水轮机调节系统仿真
基于MATLAB的水轮机调节系统仿真
罗旋;魏守平
【期刊名称】《西北水电》
【年(卷),期】2005(000)003
【摘要】对水轮机调节系统建立数学模型,利用美国Mathworks公司的MATLAB 软件,对通常的水轮机调速器水电站试验项目(空载频率波动、空载扰动、甩负荷)进行初步的仿真.
【总页数】4页(P39-41,48)
【作者】罗旋;魏守平
【作者单位】华中科技大学水电与数字化工程学院,武汉,430074;华中科技大学水电与数字化工程学院,武汉,430074
【正文语种】中文
【中图分类】TK730.41;TP391.9
【相关文献】
1.基于MATLAB的水轮机调节系统仿真 [J], 罗旋;魏守平
2.基于MATLAB的水轮机调节系统仿真 [J], 王煜;曾云;张思青
3.基于Matlab的水轮机调节系统仿真分析 [J], 涂玥;南海鹏
4.基于MATLAB的水轮机调节系统仿真分析 [J], 唐良宝;包居敏
5.基于MATLAB
6.5的水轮机调节系统仿真 [J], 杨华琳;陈冬冬;代应
因版权原因,仅展示原文概要,查看原文内容请购买。
某水电厂水轮机调速器空载运行特性的仿真分析
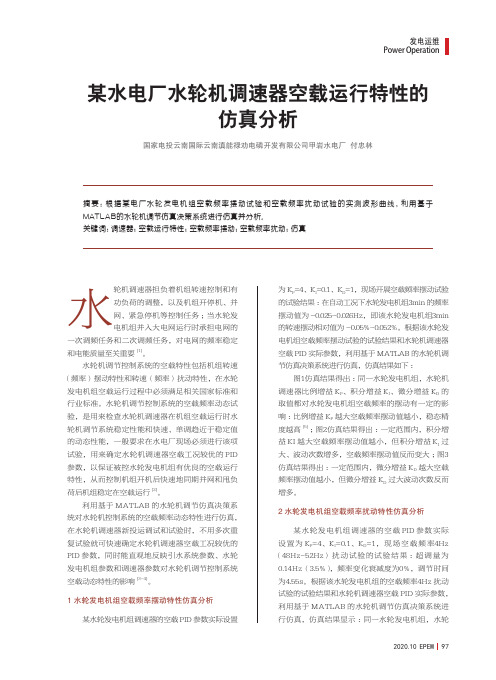
2020.10 EPEM97发电运维Power Operation某水电厂水轮机调速器空载运行特性的仿真分析国家电投云南国际云南滇能禄劝电磷开发有限公司甲岩水电厂 付忠林摘要:根据某电厂水轮发电机组空载频率摆动试验和空载频率扰动试验的实测波形曲线,利用基于MATLAB的水轮机调节仿真决策系统进行仿真并分析。
关键词:调速器;空载运行特性;空载频率摆动;空载频率扰动;仿真水轮机调速器担负着机组转速控制和有功负荷的调整,以及机组开停机、并网、紧急停机等控制任务;当水轮发电机组并入大电网运行时承担电网的一次调频任务和二次调频任务,对电网的频率稳定和电能质量至关重要[1]。
水轮机调节控制系统的空载特性包括机组转速(频率)摆动特性和转速(频率)扰动特性,在水轮发电机组空载运行过程中必须满足相关国家标准和行业标准。
水轮机调节控制系统的空载频率动态试验,是用来检查水轮机调速器在机组空载运行时水轮机调节系统稳定性能和快速、单调趋近于稳定值的动态性能,一般要求在水电厂现场必须进行该项试验,用来确定水轮机调速器空载工况较优的PID 参数,以保证被控水轮发电机组有优良的空载运行特性,从而控制机组开机后快速地同期并网和甩负荷后机组稳定在空载运行[2]。
利用基于MATLAB 的水轮机调节仿真决策系统对水轮机控制系统的空载频率动态特性进行仿真,在水轮机调速器新投运调试和试验时,不用多次重复试验就可快速确定水轮机调速器空载工况较优的PID 参数,同时能直观地反映引水系统参数、水轮发电机组参数和调速器参数对水轮机调节控制系统空载动态特性的影响[3-4]。
1 水轮发电机组空载频率摆动特性仿真分析某水轮发电机组调速器的空载PID 参数实际设置为K P =4、K I =0.1、K D =1,现场开展空载频率摆动试验的试验结果:在自动工况下水轮发电机组3min 的频率摆动值为-0.025~0.026Hz,即该水轮发电机组3min 的转速摆动相对值为-0.05%~0.052%。
水轮机调节系统一次调频特性仿真1

水轮机调节系统一次调频特性仿真魏守平一.水轮机调节系统机组一次调频特性电力系统运行的主要任务之一,是控制电网频率在50Hz附近的一个允许范围内。
电网频率偏离额定值50Hz的原因是能源侧(水电、火电、核电……)的供电功率与负荷侧的用电功率之间的平衡被破坏而引起的。
负荷的用电功率是经常在变化的,因此,电网的频率控制的实质是:根据电网频率偏离50Hz的方向和数值,实时在线地通过水电和火电发电机组的调节系统和电网自动发电控制系统(AGC),调节能源侧的供电功率以适应负荷侧的用电功率的变化,达到电网发电与用电的功率平衡,从而使电网频率恢复到50Hz附近的一个允许范围内。
电网频率控制的手段有:一次调频、二次调频、高频切机、自动低频减负载和机组低频自启动等,其中一次调频和二次调频与水轮机控制系统有着密切的关系。
我们所说的“水轮机调节系统机组一次调频特性”是指,水轮机调节系统的被控制系统并入大电网运行,当大电网频率变化超过微机调速器设定的频率(转速)死区时,水轮机调节系统进行自动调节的动态特性。
通过水轮发电机组调节系统的自身负荷-频率静态和动态特性对电网的控制,通常称之为一次调频,调速器的输入量是电网频率f n,一次调频是由水轮机调速器的电网频率f n和机组功率P的静态特性f n=f(P)和调速器PID调节特性来实现的;完成电网二次调频的电网AGC 系统,则是从电网的宏观控制上、经济运行及电网交换功率控制等因素上,向有关水电和火电机组调速系统下达相应机组的目标(计划)功率值P c,从而实现电网范围内的功率/频率控制(LFC),调速器的输入量是被控机组功率设定值P c。
对接力器运动过程中起到速率限制的接力器开启时间T g和接力器关闭时间T f、对接力器运动过程中起到极端位置限制的接力器完全开启位置(y=1.0)和接力器完全关闭位置(y=0)等,是接力器运动过程中的主要非线性因素。
如果按照水轮机调节系统运行和试验中的动态过程中,接力器运动是否进入了上述接力器的非线性区域,来划分水轮机调节系统动态过程特征,我们可以将水轮机调节系统运行和试验中的动态过程划分为大波动(大扰动)和小波动(小扰动)动态过程。
水轮机调节系统仿真研究及参数分析
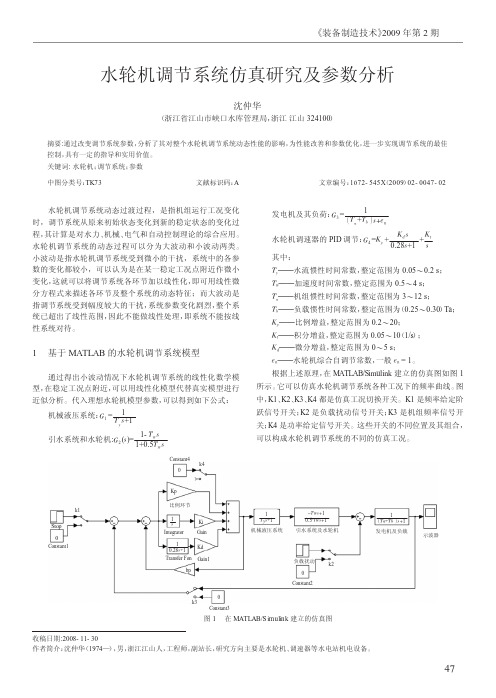
水轮机调节系统的稳定性和动态特性品质,取决于调节 对象和调速器的特性,在电站设计阶段,就应该考虑到。对于 已运行的电站,Tw、Ta 和调速器结构都已确定,主要依靠调整 校正装置参数来改善调节系统的稳定性和动态特性品质。一 般希望寻找调节器参数的最佳整定,以使水轮机调节系统过 渡过程达到最佳。 3.1 调节对象参数分析
T!
# #
n
=Tw
#
PID:
b T #
## t a "
=2~2.5Tw
T#
# #
d
=1~1.5Tw
#
T##
$p
=5Tw
在实际操作中,我们更常用斯坦因的推荐值作为初始整
定依据,通过空载频率阶跃扰动,决定一组调节过程快,超调
量不很大的参数,同时保证空载频率摆动符合规程要求,再通
过甩负荷验证。
3 水轮机调节系统参数分析
SHEN Zhong- hua (Zhejiang Jiangshan Xiakou Reservoir Administration Bureau,Jiangshan Zhejiang 324100,China)
Abs tract: Conditioning system by changing the parameters, an analysis of its control over the whole turbine regulating system dynamic performance effects of parameters for performance improvement and optimization, further conditioning system to achieve the best control, with a certain degree of guidance and practical value Key words : turbine;conditioning systems,;parameter
水轮机调节系统的仿真与优化

水轮机调节系统的仿真与优化设计者:闫艳伟、夏春杰、刘博文、房全国、郭朋飞指导老师:周俊杰(郑州大学化工与能源学院,郑州,450001)摘要水能一种可再生能源,是清洁能源,是绿色能源。
我国水资源的蕴藏总量是比较丰富的,占世界第五位,随着科技的进步我国的水利工程也得到迅速发展。
而水轮机在水利工程中起着至关重要的作用。
随着科学技术的发展和新学科边缘学科交叉学科的诞生,计算机的应用、水轮机技术得到了进一步的完善发展,并取得了卓著绩效。
改善水力性能提高效率,特别在近年来,水轮机制造业都在不断提高水轮机效率上下功夫,无论是其最高效率和平均效率都有了新的突破。
利用matlab simulink对水轮机进行系统仿真主要内容有:(1)水轮机装置系统的数学模型的建立,包括:引水系统、液压随动系统、发电机系统、水轮机线性和非线性系统。
(2)在simulink下建立水轮机的线性和非线性发电系统的仿真模型。
(3)对甩15%载荷和甩60%载荷进行了仿真分析,并得出水轮机线性化模型优于非线性化模型稳定性。
【关键字】:水轮机;数值模拟;水轮机仿真模拟;线性化;非线性化目录1.前言 (3)1.1水轮机的发展历史 (3)1.2水轮机国内外研究现状 (3)1.3本文的主要工作 (4)2 水轮机发电系统仿真 (4)2.1 水轮机发电原理 (4)2.2 水轮机装置的数学模型 (5)2.2.1引水系统数学模型 (5)2.2.2液压随动系统模型 (5)2.2.3发电机系统数学模型 (5)2.3 水轮机系统仿真建模 (5)2.3.1线性化水轮机的数学模型 (5)2.3.2线性化水轮机的仿真建模 (6)2.3.3非线性水轮机的数学模型 (6)2.3.4非线性水轮机的仿真建模 (8)2.4水轮机调节系统的仿真建模 (9)2.5结果分析 (10)2.6 本章小节 (11)1前言1.1水轮机的发展历史水轮机是把水流的能量转换为旋转机械能的动力机械,它属于流体机械中的透平机械。
水轮机调速器与电网负荷频率控制(一)水轮机控制系统的建模及仿真

"! # K Yf % ‘ 0 > &5 ? N 5 < ef ,j
-. $ 4{| OPH > 0 ! W ; OLj~ % aaxbv"/
ghYi ( % # # $ , # & , # )’VW Yi ( % # # $ , # & , % !&
" 1 $ v Z &’ L () " ! R : 9 " ]!
V; B VW L 0 W ; & 6 V0 > > #T B>! B % > L F H F>K L 7 ; = <;$ F H 6) G! ! $ ) 7 67 = <7 ! !!!% #!!!! N) 7N-K 7 & F6% ) ) ) 7 7 <K 7 $K 7 7 ’ ) ) 7 >K 7 #<K ’ 7 7 :4 >:H :H B ! L 0 W ; & 6 > ! > $ % > ] ] :H T B>! ] :4 B L F H C C # C ! $ F K = <; F H 6) L 7 > G;
4 D! PQ # #efYZ
#" $! , ! " "3 -. => + *ef => } k $ ! \ !4 { % O 3 h Q M g ( X m J" \ %Q|^ ! $% $ {%Mg7Y" J U yz m ah QMg7 \ * Ybx" k%O3w \ & 4 k% O 3 M g ( X m J " d]l! w 2$ Mg$B \ c $ k % 5O$cL " ) $ 2 M g () $ B \ + 4 O ‘ m J" \ ) 4 O ‘ m J’ yW s 4 ST ;4{|j ~ m>4 P J 4 A / ; 3 X4; 0 ro = > 4 { | O L S T l a y W ; sq" xAcn|^D! # #3 yz b> a x b v ’ $ => m 4 % =>| * c 7 $’
大型汽轮发电机组孤网运行的DEH仿真模型

大型汽轮发电机组孤网运行的DEH仿真模型发布时间:2022-10-19T02:40:22.897Z 来源:《福光技术》2022年21期作者:赵奕州1 高云龙2 [导读] 300MW及以上大型汽轮发电机组DEH在设计制造的过程中都配备有仿真程序,但均是按照并网运行特性建立的模型,不适用于孤网运行模式。
为适应机组孤网运行,使孤网运行机组能够在启动前完成仿真试验,验证DEH的控制功能,使运行人员熟悉孤网模式下的控制方式及特性,特对DEH仿真模型进行改造,使之符合孤网运行的特性。
赵奕州1 高云龙21.国网辽宁省电力有限公司电力科学研究院辽宁沈 1100162.宁夏临河发电有限公司宁夏灵武 750403摘要:300MW及以上大型汽轮发电机组DEH在设计制造的过程中都配备有仿真程序,但均是按照并网运行特性建立的模型,不适用于孤网运行模式。
为适应机组孤网运行,使孤网运行机组能够在启动前完成仿真试验,验证DEH的控制功能,使运行人员熟悉孤网模式下的控制方式及特性,特对DEH仿真模型进行改造,使之符合孤网运行的特性。
关键词:孤网;DEH;仿真;模型一、概述近年来,大用户直供电、自备电厂自供电已在全国有较多开展,其中孤网运行方式较为普遍,300MW机组及以上大型汽轮发电机组在孤网运行中已成为主力机型。
由于大型汽轮发电机组的电液调节系统(DEH)在设计、制造中,均是按照机组并网运行考虑,因此,以孤网模式运行的机组需要对DEH控制系统进行孤网运行模式改造。
改造的内容主要是对汽轮机的转速控制、同期并网、一次调频、二次调频、超速控制、甩负荷控制、协调控制等控制回路进行改造,使之适应孤网模式运行。
上述改造已经有较为成熟的改造方法和经验,本文不再赘述。
但是,上述改造一般并未对DEH中的一个重要组成部分,即仿真程序进行改造,机组运行前进行的仿真试验中,转速模型和功率模型仍然是并网运行的特性,没有体现出孤网运行的特性,不利于对DEH孤网运行控制功能的检查验证,也不利于运行人员熟悉孤网模式下的控制方式及特性。
水轮机调节系统空载扰动特性仿真1

水轮机调节系统空载扰动特性仿真魏守平一.水轮机调节系统空载扰动特性的仿真结果GB/T 9651.1-2007《水轮机控制系统试验规程》规定:“7.21.2自动方式空载工况下,对调速系统施加阶跃频率扰动(一般采用阶跃变化微机调速器控制器的频率给定数值),记录机组转速、接力器行程等的过渡过程,选取转速摆动值和超调量较小、波动次数少、稳定快的一组调节参数,提供空载运行使用。
在该组调节参数下,用自动记录仪记录机组 3 min(为观察到有大致固定周期的摆动,可延长至5min)的转速摆动情况,量取有大致固定周期的转速摆动幅值;重复三次,取其平均值。
”1. 仿真策略在进行水轮机调节系统空载扰动特性的每一次仿真中,我们的仿真策略是“1个(组)仿真目标参数的3个(组)数值仿真”,也就是说,在每次仿真中,采用选择的1个(组)仿真目标参数的3个(组)数值进行,将这3个仿真的动态过程的仿真变量波形和全部仿真参数在1个仿真图形中表示。
众所周知,对应1个(组)仿真目标参数的仿真,只能得到一个孤立的动态过程;对应2个(组)仿真目标参数的仿真,可以得到互为比较的2个动态过程;而对应3个(组)仿真目标参数的3个动态过程,则为进行参数变化对动态过程影响分析,提供了更为形象直观的结果。
在本次的水轮机调节系统空载扰动特性的仿真结果中,显示了机组频率f和接力器行程y的动态波形和所有的仿真参数。
动态波形的纵坐标显示了机组频率f和接力器行程y 等2个变量,机组频率f是以赫芝(Hz)为单位,接力器行程y是以相对值显示;动态波形的横坐标是时间坐标t,单位是秒s。
为了便于比较、分析和研究某1个(组)参数的取值对水轮机调节系统动态特性的作用,在其他的水轮机调节系统参数相同的条件下,选定1个或1组(数个)仿真目标参数,并选择各自3个不同的数值进行仿真,同时得到与之对应的3个仿真结果。
第1个(组)变量对应的仿真曲线是红色点画线,第2个(组)变量对应的仿真曲线是黑色实线,第3个(组)变量对应的仿真曲线是蓝色虚线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水轮机调节系统机组孤立电网运行特性仿真魏守平一.水轮机调节系统机组孤立电网运行特性1 水轮机调节系统孤立电网运行水轮发电机组有多种工作状态:机组开机、机组停机、同期并网前和从电网解列后的空载、小电网或孤立电网运行、以频率 (转速)调节和功率调节并列于大电网运行、水位和/或流量控制等。
被控机组在小(孤立)电网运行称为孤立电网运行( Isolated Grid Operation),孤立电网运行是指电网中只有一台机组或本台机组容量占电网容量比重相当大的运行方式。
孤立电网运行工况,对于绝大多数大中型机组,这是一种事故性的和暂时的工况,当被控机组与大电网事故解列时,水轮机微机调速器会根据电网频差超差自动转为频率调节模式-工作于频率调节器方式(频率死区E f=0)。
由于被控机组容量占小电网总容量的比例、小电网突变负荷大小和小电网负荷特性等因素的影响,使得这种情况下的调速器的工作条件十分复杂,只能尽量维持电网频率在一定范围内。
如果突变负荷超过小电网总容量的(10~20)%,由于接力器开启时间T q和关闭时间T f的存在,则大的动态频率下降或上升是不可避免的。
对于孤立电网运行工况,调速器应工作于频率调节模式的PID调节。
PID参数的整定则更为复杂了,必需在现场根据机组容量、突变负荷的容量、负荷性质等加以试验整定。
PID 参数的选择原则是:在保证孤立电网运行动态稳定的前提下,尽量选取较大的比例增益K p(较小的暂态转差系数b t)和较大的积分增益K I(较小的暂态转差系数b t和较小的缓冲时间常数T d,使得电网频率动态变化峰值小、向额定频率恢复时间短。
GB/T 9652.2—2007“水轮机控制系统试验规程”规定:“水头在额定值的±10%范围内,机组带孤立的、约为90%额定功率的电阻负荷的条件下,突然改变不大于5%额定功率的负载,用自动记录仪记录频率变化过程。
频率变化的衰减度(与起始偏差符号相同的第二个转速偏差峰值与起始偏差峰值之比)应不大于25%。
”这在实际中是很难实施的。
孤立负载的转速控制一般被定义为对额定频率的最大偏差,是由孤立负载的功率变化引起的。
在通常情况下,经常发生的负荷变化的等级在设计过程和仿真研究中就能被鉴定出来,仿真研究的目的是确定不同数值的发电机惯性、水流惯性、接力器开启时间T q和关闭时间T f对频率变化影响,以及验证频率偏差是否保持在所要求的限制范围内。
对接力器运动过程中起到速率限制的接力器开启时间T g和接力器关闭时间T f、对接力器运动过程中起到极端位置限制的接力器完全开启位置(y=1.0)和接力器完全关闭位置(y=0)等,是接力器运动过程中的主要非线性因素。
如果按照水轮机调节系统运行和试验中的动态过程中,接力器运动是否进入了上述接力器的非线性区域,来划分水轮机调节系统动态过程特征,我们可以将水轮机调节系统运行和试验中的动态过程划分为大波动(大扰动)和小波动(小扰动)动态过程。
水轮机调节系统的孤立电网运行特性是具有大波动特征的动态过程。
2 对孤立电网运行的水轮机调节系统动态特性的技术要求1). GB/T 9652.2-2007 《水轮机控制系统试验规程》有关机组带孤立负荷(机组孤立电网运行)试验的规定:“6.22孤立负荷试验水头在额定值的±10%范围内,机组带孤立的、约为90%额定功率的电阻负荷的条件10下,突然改变不大于5%额定功率的负载,用自动记录仪记录频率变化过程。
频率变化的衰减度(与起始偏差符号相同的第二个转速偏差峰值与起始偏差峰值之比)应不大于25%。
当不具备真实孤立负荷试验条件时,如用户要求,可采用孤立电网运行仿真试验,此时发电机组并入真实电网运行,将机组数字模型(机组模型应计入机组惯性、负荷惯性和被调节系统的自调节系数)的频率输出信号引至电调频率输入口,代替被测电网频率信号。
这种在线仿真已包括真实的水力系统动态响应,仅忽略了被测机组转速变化对水轮机流量的影响。
”2). 工程实际对孤立电网运行的水轮机调节系统的技术要求(1). 应该保证孤立电网运行的电力系统稳定运行。
(2).电网突减或突加负荷的动态过程应该满足下列要求:①. 对于电网突加负荷的工况,尽量增大电网突加负荷动态过程中的电网频率谷值f min (最小值),对于电网突减负荷的工况,尽量减小电网突减负荷动态过程中的电网频率峰值f max (最大值)。
②. 对于电网突加负荷的工况,在电网突加负荷动态过程中,尽量缩短电网频率从频率谷值f min (最小值)至稳定值的调节时间。
对于电网突减负荷的工况,在电网突减负荷动态过程中,尽量缩短电网频率从频率峰值f max (最大值)二.孤立电网运行特性仿真结果1.仿真策略在进行水轮机调节系统孤立电网运行特性的每一次仿真中,我们的仿真策略是“1个(组)仿真目标参数的3个(组)数值仿真”,也就是说,在每次仿真中,采用选择的1个(组)仿真目标参数的3个(组)数值进行,将这3个仿真的动态过程的仿真变量波形和全部仿真参数在1个仿真图形中表示。
在本章的水轮机调节系统机组孤立电网运行仿真中,显示了电网频率f(也就是孤立电网频率)和接力器行程y的动态波形和所有的仿真参数。
动态波形的纵坐标显示了电网频率f和接力器行程y等2个变量,电网频率f是以赫芝(Hz)为单位,接力器行程y是以相对值显示;动态波形的横坐标是时间坐标t,单位是秒s。
为了便于比较、分析和研究某一个(组)参数的取值对水轮机调节系统动态特性的作用,在其他的水轮机调节系统参数相同的条件下,选定1个或1组(数个)仿真目标参数,并选择各自3个不同的数值进行仿真,同时得到与之对应的3个仿真结果。
第1个(组)变量对应的仿真曲线是红色点画线,第2个(组)变量对应的仿真曲线是黑色实线,第3个(组)变量对应的仿真曲线是蓝色虚线。
在仿真波形图中的仿真参数显示区,标示了仿真采用的水轮机调节系统全部参数,在参数显示区的下部用红色、黑色和蓝色标示了3个(组)仿真目标参数,它们分别与红色、黑色和蓝色的仿真动态仿真波形对应。
2.仿真标注在仿真项目中设置了“仿真标注”变量。
“仿真标注”变量为空时,仿真结果中没有显示;针对具体水电站的某台机组仿真,可以键入“[###水电厂#号机]”、“[仿真人员]”或[仿真简要说明],在仿真结果波形图上会显示相应内容。
3.水轮机调节系统机组单调节和双调节动态特性1).调节方式变量K12考虑了水轮机调节系统的单调节和双调节特性,引入了调节方式变量K12。
仅仅在水轮机调节系统的大波动(机组1段导叶接力器关闭甩负荷、机组2-3段导叶接力器关闭甩负荷和机组在孤立电网运行等工况)仿真中考虑了机组的单调节和双调节特性并使用调节方式变量K12。
(1).K12=1:仿真系统在单调节方式运行,仿真人机对话界面上的桨叶接力器参数(桨叶关闭时间Tjf、桨叶开启时间Tjg和桨叶延迟关闭时间Tjys)不起作用,仿真结果中也不显示和双调节有关的参数。
(2). K12=2.0-3.7:仿真系统在双调节方式运行,仿真结果中会显示与双调节有关的参数(桨叶关闭时间Tjf、桨叶开启时间Tjg和桨叶延迟关闭时间Tjys)。
由于桨叶关闭时间Tjf和桨叶开启时间Tjg均明显分别小于桨叶关闭时间Tj和桨叶开启时间Tj,所以,双调节机组在波动大的动态过程中(例如机组甩负荷动态过程和孤立电网大负荷变化)的机组效率,将随着偏离协联工况的程度而下降,软件中设置了18种体现协联特性导致的机组效率下降的协联特性系数K12可供选择;K12的数值愈大,在同样偏离协联工况程度的工况下,水轮机在非协联工况下的机组效率下降愈大。
在机组导叶接力器1段、2-3段关闭甩负荷仿真及机组在小电网运行方式的仿真界面中,包含有桨叶接力器开启时间Tjg和桨叶接力器关闭时间Tjf(单位为秒(s),均为折算为桨叶接力器全行程时间);在2段和3段关闭甩负荷仿真的“桨叶延迟关闭时间”仿真项目中,还有桨叶延迟关闭时间(Tjys)的仿真变量。
4.动态过程稳定时间我们定义,从突变负荷开始,到机组转速进入机组转速相对偏差小于±0.2%(绝对值为±0.1Hz)为止的时间,也就是电网频率恢复到 (49.9Hz ~50.1Hz)之内的时间称之为突加负荷的调节稳定时间t E。
在仿真结果的波形图中,分别标出了电网频率49.9Hz和50.1Hz等2条蓝色实线,这2条蓝色实线之间的宽带,就是突加负荷后,电网频率调节稳定区域。
图中还还标出了电网频率49.8Hz和50.2Hz这2条黑色实线供参考。
在水轮机调节系统机组孤立电网运行仿真中,采用下列主要变量及参数符号:p-发电机有功功率;f-孤立电网运行频率 (Hz);t-时间s;Δy PI-突加负荷后,接力器开度的直线段调节分量。
f m-突加负荷后机组最小频率(Hz),M p=(50.0- f m)/50.0-甩负荷后机组最小转速下降率,最大频率下降相对值,t M-从突加负荷开始至转速降至最低转速所经历的时间s,t E-从机组突加负荷时起,到机组转速相对偏差小于±0.2%(绝对值为±0.1Hz) 为止的调节时间s,即电网频率恢复到 (49.9Hz ~50.1Hz)之内的时间。
为了适应孤立电网运行动态过程的向上向下扰动的工况,在仿真参数中,设置了可以修改的仿真结果动态波形图的坐标最大值fmax和坐标最小值fmin。
仿真结果动态波形图中的仿真参数显示区,会随着坐标最小值fmin的设定而跟随移动。
恰当地选择波形图的坐标最大值fmax和坐标最小值fmin的数值,可以使仿真结果动态波形图的显示布局更为合理和清晰。
6. STXTFZ-1水轮机调节仿真决策支持系统的决策支持根据工程实际中出现的问题, STFZXT-1水轮机调节仿真决策支持系统可以进行有针对性问题的水轮机调节系统仿真,为解决实际问题和改善其动态特性提供决策支持;特别是对于水电站从事水轮机调节的技术人员和水轮机调速器生产厂家的现场调试技术人员,提供了一种快速简单可靠的仿真分析手段;也是调速器生产厂家的设计人员的理想工具。
在仿真中对仿真的动态过程的动态特性性能指标进行了分析,并对其动态特性类型进行了分类(迟缓型、优良型、振荡型等),为如何修改PID参数以优化系统动态性能提供了决策支持。
7. 双调节机组在小电网中运行特点*电网突加20%额定负荷的单调节机组动态特性单调节机组:K12=1.0,导叶接力器关闭时间Tf=10.0s,导叶接力器开启时间Tg=20.0s。
*电网突加20%额定负荷的双调节机组动态特性桨叶接力器关闭时间Tjf=30s,桨叶接力器开启时间Tjg=30s。
*电网突减20%额定负荷的单调节机组动态特性单调节机组:K12=1.0,导叶接力器关闭时间Tf=10.0s,导叶接力器开启时间Tg=20.0s。