STM F C T 核心板
STM32F103C8+L298N_PWM直流电机调速
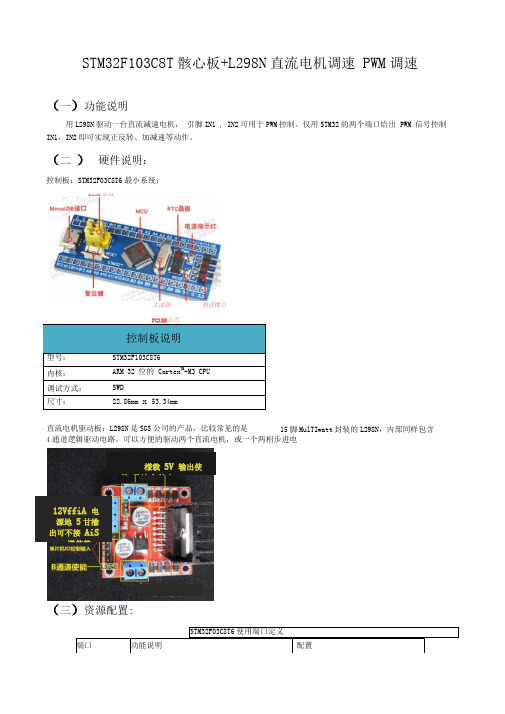
STM32F103C8T 骸心板+L298N 直流电机调速 PWM 调速 (一)功能说明用L298N 驱动一台直流减速电机, 引脚IN1 , IN2可用于PWM 控制。
仅用STM32的两个端口给出 PWM 信号控制IN1,IN2即可实现正反转、加减速等动作。
(二 ) 硬件说明:控制板说明型号:STM32F103C8T6 内核:ARM 32 位的 Cortex TM -M3 CPU 调试方式:SWD 尺寸:22.86mm x 53.34mm 直流电机驱动板:L298N 是SGS 公司的产品,比较常见的是(三)资源配置STM32F03C8T6使用端口定义 端口 功能说明 配置15脚MulTIwatt 封装的L298N ,内部同样包含 控制板:STM32F03C8T6最小系统;BOOT 选择主晶扼调试摟口4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
马达B 输12VffiA 电源地 5甘揄出可不接 AiS道使能一様载5V 输出使第 马达A 輪出(四)软件实现1:通用定时器TIM3的中断定时实现步骤①使能定时器时钟。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);②初始化定时器,配置【ARR自动装载值,PSC预分频系数。
】TIM_TimeBase In it(TIM3, &TIM_TimeBaseStructure);③开启定时器中断,配置NVIC。
TIM_ITCo nfig(TIM3,TIMl_I T_Update,ENABLE);NVIC_I nit(&N VIC_I nitStructure);④使能定时器。
TIM_Cmd(TIM3, ENABLE); // 实际是配置控制寄存器 1 (TIM3_CR1)⑥ 编写中断服务函数。
TIMx IRQHa ndler();2:通用定时器TIM2的Channell、Channel2的PWM实现步骤①使能定时器2和相关10 口时钟。
集特核心板GCE-2001-01说明书

说明除列明随产品配置的配件外,本手册包含的内容并不代表本公司的承诺,本公司保留对此手册更改的权利,且不另行通知。
对于任何因安装、使用不当而导致的直接、间接、有意或无意的损坏及隐患概不负责。
订购产品前,请向经销商详细了解产品性能是否符合您的需求。
本手册所涉及到的其他商标,其所有权为相应的产品厂家所拥有。
本手册内容受版权保护,版权所有。
未经许可,不得以机械的、电子的或其它任何方式进行复制。
温馨提示1、产品使用前,务必请仔细阅读产品说明书。
2、对未准备安装的主板,应将其保存在防静电保护袋中。
3、在从包装袋中拿主板前,应将手先置于接地金属物体上一会儿,以释放身体及手中的静电4、在使用前,宜将主板置于稳固的平面上。
5、请保持主板的干燥,散热片的开口缝槽是用于通风,避免机箱内的部件过热。
请勿将此类开口掩盖或堵塞。
6、在将主板与电源连接前,请确认电源电压值。
7、请将电源线置于不会被践踏的地方,且不要在电源线上堆置任何物件。
8、当您需连接或拔除任何设备前,须确定所有的电源线事先已被拔掉。
9、为避免人体被电击或产品被损坏,在每次对整机、板卡进行拔插或重新配置时,须先关闭交流电源或将交流电源线从电源插座中拔掉。
10、请留意手册上提到的所有注意和警告事项。
11、为避免频繁开关机对产品造成不必要的损伤,关机后,应至少等待30秒后再开机。
12、设备在使用过程中出现异常情况,请找专业人员处理。
13、请不要将本设备置于或保存在环境温度高于70℃上,否则会对设备造成伤害。
目录目录 (1)1.产品简介 (1)1.1概述11.2产品特点 (2)1.3产品指标 (2)2.细参数说明 (4)2.1COMe外形尺寸 (4)2.2COMe连接器接口定义 (5)1.产品简介1.1概述GCE-2001-01基于飞腾D2000-8处理器的COMe模块,模块按照PICMG COMExpress 规范设计,符合COMExpress Type6Rev2.0接口类型定义,尺寸规格为Basic规格。
基于STM32的温湿度检测设计

XXXX学院大作业报告题目基于STM 32的温湿度检测课程名称嵌入式系统及其应用二级学院机电工程工程学院专业班级 XXXXXXX 学生姓名 XXXXX 学号指导教师X年X月X日到X年X月X日目录摘要 (1)1. 设计目标 (2)2. 设计方案 (2)3. 实验器材 (2)4. 结构及工作原理 (2)5. 元件及功能 (3)2.1 STM32F103ZET6 介绍 (3)2.2 温湿度传感器介绍 (5)2.3 LCD12864介绍 (5)3. 结论 (6)4.心得 (6)附录 (7)结果图 (9)基于STM 32的温湿度检测摘要:在现代生活中,温湿度测量几乎涉及到各个领域,包括探险救灾机器人、温室环境智能监控系统、医院、工业控制、农业管理、仓库存储、文物保护等,因此研究低成本、高可靠性的温湿度系统就变得十分重要,合理的利用了各项资源,大幅度提产品的产量和质量,极大的改善了人民的生活水平。
采用先进的信息技术和人工智能技术来对生产环境进行科学有效的管理就显得十分重要了。
本设计选用STM32为核心控制器与处理器,温湿度传感器,利用ADC转换,得到相应的温度、湿度值并通过液晶显示,也可通过串口进行显示。
每隔一段时间(如2秒)往串口发送一次温湿度信息;具有报警功能,如:当湿度值大于70%RH时,蜂鸣器报警,LED闪烁,液晶显示提示。
该设计可有效检测当前温湿度,灵敏度高,稳定准确,在实际应用中前景良好。
1.设计目标本次设计要求实现对周围环境温湿度的感知以及显示。
要求学生对STM32有一定程度的理解,熟悉STM32串口以及中断的使用,会基本的C语言和java,熟练掌握keil for ARM软件的使用与程序下载以及手机软件开发环境。
2.设计方案(1)了解温湿度传感器工作原理,根据原理画好PCB原理图。
(2)根据PCB原理图自制PCB板电路,将液晶屏,温湿度传感器,变压器,stm32开发板等相关元件设备进行集成。
基于STM32F103C8T6的两轮自平衡车系统设计

文章编号:1007-757X(2021)01-0010-03基于STM32F103C8T6的两轮自平衡车系统设计聂茹(华南理工大学广州学院电子信息工程学院,广东广州510800)摘要:在STM32F103C8T6微控制器芯片基础上,提出了两轮自平衡车系统的一种设计方案。
系统方案包括STM32F103C8T6微控制器电路设计、车体姿态传感器MPU6050检测电路设计、电机驱动电路设计、以PID控制器为核心的软件设计。
经过测试,两轮自平衡车系统样机能够保持车体自我平衡并简单的直立行走,验证了硬件设计和软件设计的有效性和可靠性。
关键词:MPU6050;STM32;PID控制器;自平衡车中图分类号:TP212.9文献标志码:ADesign of Two-wheel Self-balancing Vehicle System Based on STM32F103C8T6NIE Ru(School of Electronic Information Engineering,Guangzhou College of SouthChina University of Technology,Guangzhou510800,China)Abstract:On the basis of STM32F103C8T6microcontroller chip,this paper presents a design scheme of two-wheel self-balancing vehicle system.The system scheme includesthe circuit design of STM32F103C8T6microcontroller,the detection circuit design of vehicle body attitude sensor MPU6050,the circuit design of motor drive,software design with PID controller as the core.After test,two-wheel self-balancing vehicle system prototype can maintain the self-balance of the car body and simply walk upright,which verifies the effectiveness and reliability of hardware design and software design.Key words:MPU6050;STM32;PID controller;self-balanced vehicle0引言当今社会,生活向着智能化、便捷化发展,两轮平衡车顺应时代潮流,成为适合多种场合使用的代步工具。
基于FPGA的雨量自动气象站设计

以达到软件滤波的目的。
图5干扰信号波形图
3. 3 cnt_ra i n雨量计数模块
当程序判断rain_in接口再次岀现高电平时,并且该
0引言
随着山洪地质灾害防治项目的推进,气象、水利部门建 成的雨量自动气象站快速增长,相关研发和维护的从业人次 也随之增加。由于商业竞争、工作难度等因素,虽然自动气象 站维护的资料较多n知,但是自动气象站设计的公开资料很 少⑷。当前,大量的自动气象站研发和维护人员,不仅需要维 护知识,如果能更深入的了解自动气象站的设计,将有助于 灵活的开展工作,提高效率。
Design of Rainfall Automatic Meteorological Station Based on FPGA
Tang Xiaobo1, Liu Xiaojun1, Liu bin2
(1. Guilin Meteorological Administra/tion, Guilin Guangxi, 541001; 2. Yangshuo Meteorological Administfgtion, Guilin Guangxi, 541900)
象站。该自动站具有对降水数据的釆集、计算、传输等功能。
可见,不同厂商虽釆用不同型号命名雨量自动气象站, 但其釆集器普遍选用ARM等32位可编程器件,传感器多见翻 斗式雨量传感器,加上一些供电电源、通讯电路即构成雨量 自动气象站。本文釆用类似的设计思路,介绍一种雨量自动 气象站的设计方法。
1材料与方法
end
else case(state)
stm32串口实验:stm32通过usart1进行串口收发,PA9(TX)和PA10(RX)

stm32串⼝实验:stm32通过usart1进⾏串⼝收发,PA9(TX)和PA10(RX)这是stm32开发中⽐较简单的实验,原理是通过串⼝助⼿发送信息,stm32接收到信息以后在串⼝助⼿中打印相同的内容。
这⾥直接分享keil5⼯程代码,是在⼯程模板的基础上移植和修改了正点原⼦的串⼝代码(如果失效的话可以在下⽅评论留下邮箱,我看到会给你发⼀份)顺便把usart.c和usart.h还有mian.c中的代码复制到下⾯,⼩伙伴可以直接移植到⾃⼰的⼯程中实现的效果也在下⾯放上串⼝助⼿中显⽰的图⽚usart.c1 #include "sys.h"2 #include "usart.h"345//STM32F103核⼼板例程6//库函数版本例程7/********** 出品 ********/8910//////////////////////////////////////////////////////////////////////////////////11//如果使⽤ucos,则包括下⾯的头⽂件即可.12#if SYSTEM_SUPPORT_UCOS13 #include "includes.h"//ucos 使⽤14#endif15//////////////////////////////////////////////////////////////////////////////////16//STM32开发板17//串⼝1初始化1819//////////////////////////////////////////////////////////////////////////////////202122//////////////////////////////////////////////////////////////////23//加⼊以下代码,⽀持printf函数,⽽不需要选择use MicroLIB24#if 125#pragma import(__use_no_semihosting)26//标准库需要的⽀持函数27struct __FILE28 {29int handle;3031 };3233 FILE __stdout;34//定义_sys_exit()以避免使⽤半主机模式35void _sys_exit(int x)36 {37 x = x;38 }39//重定义fputc函数40int fputc(int ch, FILE *f)41 {42while((USART1->SR&0X40)==0);//循环发送,直到发送完毕43 USART1->DR = (u8) ch;44return ch;45 }46#endif4748/*使⽤microLib的⽅法*/49/*50int fputc(int ch, FILE *f)51{52 USART_SendData(USART1, (uint8_t) ch);5354 while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}5556 return ch;57}58int GetKey (void) {5960 while (!(USART1->SR & USART_FLAG_RXNE));6162 return ((int)(USART1->DR & 0x1FF));63}64*/6566#if EN_USART1_RX //如果使能了接收67//串⼝1中断服务程序68//注意,读取USARTx->SR能避免莫名其妙的错误69 u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.70//接收状态71//bit15,接收完成标志72//bit14,接收到0x0d73//bit13~0,接收到的有效字节数⽬74 u16 USART_RX_STA=0; //接收状态标记7576void uart_init(u32 bound){77//GPIO端⼝设置78 GPIO_InitTypeDef GPIO_InitStructure;79 USART_InitTypeDef USART_InitStructure;80 NVIC_InitTypeDef NVIC_InitStructure;8182 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 83//USART1_TX PA.984 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.985 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;86 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出87 GPIO_Init(GPIOA, &GPIO_InitStructure);8889//USART1_RX PA.1090 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;91 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输⼊92 GPIO_Init(GPIOA, &GPIO_InitStructure);9394//Usart1 NVIC 配置9596 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;97 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级398 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //⼦优先级399 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能100 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器101102//USART 初始化设置103104 USART_ART_BaudRate = bound;//⼀般设置为9600;105 USART_ART_WordLength = USART_WordLength_8b;//字长为8位数据格式106 USART_ART_StopBits = USART_StopBits_1;//⼀个停⽌位107 USART_ART_Parity = USART_Parity_No;//⽆奇偶校验位108 USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//⽆硬件数据流控制109 USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式110111 USART_Init(USART1, &USART_InitStructure); //初始化串⼝112 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断113 USART_Cmd(USART1, ENABLE); //使能串⼝114115 }116117118119void USART1_IRQHandler(void) //串⼝1中断服务程序120 {121 u8 Res;122 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.123 OSIntEnter();124#endif125if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)126 {127 Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据128129if((USART_RX_STA&0x8000)==0)//接收未完成130 {131if(USART_RX_STA&0x4000)//接收到了0x0d132 {133if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始134else USART_RX_STA|=0x8000; //接收完成了135 }136else//还没收到0X0D137 {138if(Res==0x0d)USART_RX_STA|=0x4000;139else140 {141 USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;142 USART_RX_STA++;143if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收144 }145 }146 }147 }148 #ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使⽤ucosII了.149 OSIntExit();150#endif151 }152#endifusart.h1 #ifndef __USART_H2#define __USART_H3 #include "stdio.h"4 #include "sys.h"56//STM32F103核⼼板例程7//库函数版本例程8/********** 出品 ********/910//////////////////////////////////////////////////////////////////////////////////11//STM32开发板12//串⼝1初始化1314#define USART_REC_LEN 200 //定义最⼤接收字节数 20015#define EN_USART1_RX 1 //使能(1)/禁⽌(0)串⼝1接收1617extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最⼤USART_REC_LEN个字节.末字节为换⾏符18extern u16 USART_RX_STA; //接收状态标记19//如果想串⼝中断接收,请不要注释以下宏定义20void uart_init(u32 bound);21#endifmain.c1 #include "sys.h"2 #include "delay.h"3 #include "usart.h"45 uint8_t t;6 uint8_t len;7 uint16_t times=0;89int main(void)10 {11 delay_init(); //延时函数初始化12 uart_init(115200); //串⼝初始化为1152001314while(1)15 {16if(USART_RX_STA&0x8000) //USART_RX_STA第⼗六位为1则括号内为1,表⽰接收完数据17 {18 len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度19 printf("\r\n您发送的消息为:\r\n\r\n");20for(t=0;t<len;t++)21 {22 USART_SendData(USART1, USART_RX_BUF[t]);//向串⼝1发送数据23while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束24 }25 printf("\r\n\r\n");//插⼊换⾏26 USART_RX_STA=0;27 }else28 {29 times++;30if(times%500==0)printf("请输⼊数据,以回车键结束\n");31 delay_ms(10);32 }33 }34 }串⼝实验效果图:未发送时发送数据时:祝⼩伙伴们2020加油!。
第二章 STC15F2K60S2单片机的基本结构

10:15:52 11
位号 D7 D6 D5 D4 D3 D2 D1 D0 符号 CY AC F0 RS1 RS0 OV F1 P
F0(PSW.5):用户标志0。 该位是由用户定义的一个状态标志。可以用软件 来使它置“1”或清“0”,也可以由软件测试F0控 制程序的流向。 F1(PSW.1):用户标志1。 该位是由用户定义的一个状态标志。与F0类似, 可以用软件来使它置“1”或清“0”,也可以由软 件测试F1控制程序的流向。
增强型8051内核,单时钟机器周期,速度比传统8051内核单片机 快8~12倍 60KB Flash程序存储器;1KB数据Flash;2048字节的SRAM 3个16位可自动重装载的定时/计数器(T0、T1、T2) 可编程时钟输出功能 至多42根I/O口线 2个全双工异步串行口(UART) 1个高速同步通信端口(SPI) 8通道10位ADC 3通道PWM/可编程计数器阵列/捕获/比较单元 内部高可靠上电复位电路和硬件看门狗 内部集成高精度R/C时钟,常温工作时,可以省去外部晶振电路。
10:15:52 8
PSW中有些位的状态是在指令执行过程中 自动形成的,有些位可以由用户采用指令 加以改变。 PSW的各位定义如下所示:
位号 D7 D6 D5 D4 D3 D2 D1 D0 符号 CY AC F0 RS1 RS0 OV F1 P
10:15:52 9
位号 D7 D6 D5 D4 D3 D2 D1 D0 符号 CY AC F0 RS1 RS0 OV F1 P
10:15:52 7
算术逻辑单元ALU:用来完成二进制数的四则 运算和布尔代数的逻辑运算。 累加器ACC又记作A:是一个具有特殊用途的8 位寄存器,在CPU中工作最频繁,用来存放操 作数和运算结果。 寄存器B:是专门为乘、除法设置的寄存器, 也是一个8位寄存器,用来存放乘法和除法中的 操作数及运算结果,对于其他指令,它只作暂 存器用。 程序状态字(PSW):又称为标志寄存器,一 个8位寄存器,用来存放执行指令后的有关状态 信息,供程序查询和判别之用。
华克仕 K-FT2K-Core 核心板说明书

使用产品之前请仔细阅读产品说明书K-FT2K-Core核心板说明书版本:v1.1版本更新表目录1注意事项 (1)2产品概述 (2)3产品规格 (3)4实物接口介绍 (4)4.1主板正反面图 (4)4.2主板加散热器图 (5)4.3主板尺寸图 (6)5接口功能定义 (7)5.1功能分布图 (7)5.2丝印描述 (8)5.3接口定义 (9)1注意事项商标本手册所提及的商标与名称都归其所属公司所有。
注意1. 使用前,请先详细阅读说明书,避免误操作导致产品损坏;2. 请将此产品放置在-20℃<=工作环境<=+60℃、90%RH的环境下,以免因过冷、热或受潮导致产品损坏;3 请勿将此产品做强烈的机械运动,以及在没有作好静电防护之前对此产品操作;4. 在安装任何外接卡或模组之前,請先关闭电源;5. 禁止对主板产品进行私自更改、拆焊,对此所导致的任何后果我司不承担任何责任;K-FT2K-Core是一款基于飞腾FT-2000/4处理器,采用采用COM Express Basic板型的核心板,尺寸为125*95mm。
K-FT2K-Core采用飞腾FT-2000/4四核芯处理器。
板载2条DDR4 SO-DIMM内存插槽。
K-FT2k-Core的COMe插槽,集成2路MAC,可外加PHY芯片扩展出2路千兆网口;集成1*PCIe-X16、2*PCIe-X8、2*PCIe-X1扩展资源,集成4*UART接口,可扩展RS232串口;集成I2C、LPC、HDA等总线资源。
主板特点:★飞腾FT-2000/4四核芯处理器;★COM Express Basic核心板小尺寸;★板载DDR4笔记本内存插槽;★丰富的PCIe扩展资源;4实物接口介绍4.1主板正反面图4.2主板加散热器图4.3主板尺寸图注意:上图单位统为毫米(mm)5接口功能定义5.1功能分布图5.2丝印描述5.3接口定义主板插针、跳线定义续1。