STM32 NUCLEO板用户手册
河里基地STM32评估板用户手册说明书
User ManualRIVERDI STM32 Evaluation BoardRev. 1.4 2021-06-02R i v e r d i E v a l u a t i o n B o a r d U s e r M a n u a lREVISION RECORDREVNO. REVDATE CONTENTS REMARKS1.0 2020-08-17 Initial Release1.1 2020-11-06 CPU information updated1.2 2021-03-09 Pictures updated1.3 2021-03-31 Document adjusted into standard template1.4 2021-06-02 Corrections on description related to jumper P7,P8,P9CONTENTSREVISION RECORD (2)Target readers (4)Overview (4)Introduction (5)Board functionality test (5)Interfacing with EVE Displays (6)Using the SPI on the STM32 (10)Hardware features (11)7.2.1 Internal (11)7.2.2 External (12)Additional literature (14)Warranty limitation (14)Legal information (14)Appendix (15)Target readersThe aim of this document is to enable engineers using Riverdi STM32 Evaluation Board to get the tested Riverdi display running fast and easily. Further tests and development can be carried out shortly after Riverdi STM32 Evaluation Board is switched on for the first time.OverviewThe Riverdi evaluation board is designed as a complete demonstration and development platform for Riverdi’s EVE and IPS displays lines driver technology.The Riverdi evaluation board features an STM32F469II Cortex-M4 microcontroller with: LCD parallel interface including 8080/6800 modes, an LCD-TFT controller, Chrom-ART Accelerator™ for enhanced graphic content creation (DMA2D), secure digital input/output interface (SDIO), LTDC signals available on header P11 with additional MCU pins broken out on P12, external SDRAM, MicroSD slot for data/media storage, RiBUS FFC conn P3 featuring SPI, UART and LCD supply pins (SPI can be controlled by either STM32 or UBS serial bridge via jumper on P7/8/9) and configurable display backlight supply (EXT/INT).IntroductionRiverdi STM32 Evaluation Board is a tool designed to help get you started on working with Riverdi products. It not only supports EVE modules but also RGB displays (in combination with touch panels) by Riverdi.You have two primary options to drive external displays:1.Jumper between P7 & P8: FTDI serial/SPI bridge connected to RiBUS SPI:Use the FT232 serial to SPI bridge by connecting a micro USB cable to the connector labeled “Direct USB” and using the EVE Screen Editor to quickly generate graphical user interfaces with minimum effort .2.Jumper between P9 & P8: STM32 connected to RiBUS SPI:Use the onboard STM32F4 to develop and test firmware for driving a connected display or display controller, like the FT80x, FT81x and BT81x series.Board functionality testThere are firmware examples with which you can test your Riverdi STM32 Evaluation Board. You can also use those as a starting point for your own firmware development.Interfacing with EVE DisplaysUsing the FTDI SPI Bridge & EVE Screen EditorPrerequisites:•Riverdi STM32 Evaluation Board•EVE-enabled display•RiBUS flexible flat cable (FFC)EVE Screen Editor InstallationDownload and install the EVE screen Editor from the FTDI homepage:https:///Support/Utilities.htm#EVEScreenEditorSetup & ConfigurationTo connect the FTDI SPI bridge to the EVE display, the configuration jumpers need to be placed between P7 and P8, as in the picture below.Set the backlight jumper (placed over the backlight power configuration pins) to 5V BL on P4 (also refer to the picture below). Please see description on how to connect power for backlight in section “Hardware features”, subsection “Backlight power supply”.Start EVE Screen Editor and you will be greeted with the screen similar to the one below:On the lower right hand side of the window, click on the ”Devices” tab.On the lower left hand side, you will find 3 buttons:This button refreshes the devices list above it;This button opens a menu to select one from the preconfigured displays list;This button opens a menu to define your own display to be driven.Use a USB cable to connect the “USB Direct” port to your computer, when running the EVE Screen E ditor application. Click the “Refresh” button afterwards and your dev board should show up like in the picture below:Select "Single RS232-HS ()” entry by clicking on it and use the ‘Connect’ button to let EVE Screen Editor try and boot up your display.If everything works properly, your display should show a blue screen with some text.Hello WorldAfter connecting to Eval Board, to generate its first text message (e. g. 'Hello World'), we are going to use the EVE Screen Editor’s built-in drag & drop editor.(The drag operation is shown in green, the generated coprocessor commands are shown in the yellow box and the button to send the data to the EVE display is seen inside the red box.)What you see now is the preview of what will be drawn on the physical screen in a moment. Note that in the lower part of the window the coprocessor tab shows which EVE pre-processor commands were generated and will be sent to the EVE display shortly after.To send the commands also drawn in the preview pan to the physical display, press the button labeled “Upload RAM_G and RAM_DL”.Using the SPI on the STM32Prerequisites•Riverdi STM32 Evaluation Board•EVE enabled display•RiBUS flexible flat cable (FFC)•Your favorite tool to flash the onboard STM32 (assuming that you use STM32CubeProgrammer together with an STLink v2 compatible ISP Programmer)InstallationUse the provided source code or the pre-compiled binary file.ConfigurationIn order to connect the STM32 to the EVE display, the configuration jumpers need to be placed between P9 and P8. Check the jumper and the USB cable position (in ‘STM32 USB’ socket) in the picture below.Hardware featuresModule power supplyPossible to deliver from one of 2 USB ports on Eval Board (“Direct USB” or “STM32 USB”), in accordance with USB standard (5.0 VDC max.)Backlight power supply7.2.1InternalFor display sizes from 3.5” to 5.0”, the USB port gives enough power to get adequate backlight level. Such backlight power supply configuration (jumper is in higher position, connects BL to 5V on P4) is shown in the picture below.For 7.0” displays, USB minimal power capability needs to be 700mA @ 5V (this is a combined power of Eval Board, BT817Q board and backlight). Please make sure your USB source has enough current efficiency. If not, use external 5V power source in the way described in point 6.2.2.7.2.2ExternalAll the 10.1” (and rarely certain 7.0” displays) require external power supply for backlight, as the backlight voltage exceeds 5V and power consumption is over the USB standard. To provide adequate backlight power, set the jumper in P4 to lower position (it connects BL to EXT) – it must be placed in lower position and connect the external DC voltage source to neighboring connector (“BL PWR”). Refer to the picture and below.Caution! There is no reverse polarity protection on EXT_BL_PWR, incorrect connection will damage the backlight permanently. Proceed carefully.EVE4 BT817Q TFT series backlight power requirement summary:Display size Internal (from USB) External3.5”OK 3.3V-6.0V (optional)4.3”OK 3.3V-6.0V (optional)5.0”OK 3.3V-6.0V (optional)7.0”Ok, if USB has 700mA min. efficiency 3.3V-6.0V (optional)You can find exact currents for specific TFT in datasheet:https:///product-category/intelligent-displays/bt817q/MicrocontrollerSTM32F469II, Arm Cortex-M4 MCU @ up to 180MHzExternal SDRAMIS42S16400J, 64Mbit/WW/pdf/42-45S16400J.pdfFTDI serial to SPI bridgehttps:///Support/Documents/DataSheets/ICs/DS_FT232H.pdfMicroSD slotWhen functional microSD card is placed in this slot, after being formatted in FAT32 format, microSD card’s memory space can be used by microcontroller as the regular filesystem.RiBUS FFC-connectorSupport for FT80x, FT81x, BT81x (max SPI speed = 30MHz),https:///download/5318/FTDI app note AN312 contains c headers and example code for FT800User LEDs: 2 pcsThey can be configured by the user, from program level.Power LED indicating power to FTDI "Direct USB”FTDI input powers both rails.Power LED indicating power to STM32 "STM32 USB"STM32 powers its own rail only.User Buttons: 2 pcsThese may be used in future, they are not used now.Serial RGB bus headerPlease refer to Application Note: ST AN4861 (LCD-TFT display controller (LTDC) on STM32 MCUs).Additional literatureAll the below sources contain the data of four BT815/816 (EVE3) and BT817/BT818 (EVE4) ICsBT81x, General:https:///bt81x/BT81x, Datasheets:https:///wp-content/uploads/Support/Documentation/Datasheets/ICs/EVE/DS_BT81X.pdfBT81x, Programming guides:https:///wp-content/uploads/Support/Documentation/Programming_Guides/ICs/EVE/BRT_AN_033_BT81X_Serie s_Programming_Guide.pdfWarranty limitationEnd user is instructed how to connect external power sources to the unit, which brings the potential threats to the Eval Board and display. Riverdi cannot be held responsible for actions beyond its control and consequently the warranty DOES NOT cover the effects of reversed power supply polarity on backlight terminals. Refer to clause in red color in section 6.2.2 of this documentLegal informationThis document has been issued with professional care. Riverdi did their best to avoid any errors, but we do not grant full warrant it is 100% errors free. Please contact Riverdi if you find any mistakes or when you think some important information is missing in this Manual.It can be updated or altered without any written notice. Riverdi cannot be held responsible for not announcing any changes or issuing next revisions or versions of this document.AppendixHardware Pinouts# Pin Description MCU Peripheral25 PF7 User Led 1 (left) GPIO Output26 PF8 User Led 2 (right) GPIO Output53 PA7 User Button 1 GPIO Input (enable pull-up)50 PA4 User Button 2 GPIO Input (enable pull-up) 130 PH15 uSD Detect (hi: uSD present) GPIO Input (enable pull-up)40 PA0 STL_TX (UART) UART4 TX41 PA1 STL_RX (UART) UART4 RX95 PB15 R_MOSI (SPI2) SPI2 MOSI94 PB14 R_MISO SPI2 MISO93 PB13 R_CLK SPI2 SCK92 PB12 R_CS SPI2 NSS86 PH9 R_INT GPIO Input84 PH10 R_RST GPIO Output5 MOSI / IO.0 PI MISO Signal / QSPI data line 06 CS SPI Chip Select Signal7 INT Interrupt Signal (Out to MCU)8 RST / PD Reset / Power Down Signal9 - 14 NC NC15 RX UART RX / I2C16 TX UART TX / I2C17 BLVDD Backlight Power Supply, 5V18 BLVDD Backlight Power Supply, 5V19 BLGND Backlight Ground (GND on display)20 BLGND Backlight Ground (GND on display)GND 1 2 3.3V VCCMOSI 3 4 SCKnCS 5 6 MISOnRST 7 8 nINTNC 9 10 NCNC 11 12 NCNC 13 14 NCTX 15 16 RX5V Backlight 17 18 5V BacklightGND 19 20 GND。
STM32 LL 库使用指南说明书

STM32 LL库使用指南---By Fengzi熟悉STM32的都知道ST官方提供了非常方便好用的库函数供用户使用,多数人都使用过STM32标准外设库,STM32Cube库(即HAL库),这个LL库是什么鬼,却从来没听说过。
好吧,我承认这个名字是我自己XJB取的。
目录一、初识LL 库 (1)二、怎么使用LL库 (3)三、新建STM32LL库工程模板 (5)四、第一个程序——点亮LED (8)五、添加其他程序功能 (10)………………………………………………………………………………………………………………………………………………….一、初识LL 库最近论坛发的STM32L476RG Nucleo开发板到手了,准备学习玩耍,当然第一步就是下载资料,于是我下载STM32L4Cube 1.1.0版本,打开逐个查看,好像和以前一样的,没什么特别嘛,于是准备开始开发。
等等,好像还真发现了有点不一样:熟悉HAL库的都知道,该库的文件几乎都是以stm32xxx_hal_xxx.h/.c命名的,为了和以前的标准库有个区分,上图中那些是什么鬼前辈说,遇到问题赶紧查手册,于是我果断打开STM32L4Cube库的说明手册(UM1884):原来这个东西叫做Low Layer APIs,作为英文渣渣表示实在不习惯洋里洋气的高大上名字,于是擅自把他叫做【STM32LL库】了(不服的你咬我啊)。
从这里看好像是说这个东东比HAL库更接近硬件,到底什么鬼,还不清楚。
但是以前好像没见过这个东西啊,就算是STM32L4Cube的1.0.0版本中都没有。
看看Cube发行历史:原来LL库是在1.1.0版本才加上的,大概意思就是:1.LL APIs是寄存器级的编程,嗯,也就是说我们常说的直接操作寄存器吧。
2.LL APIs适用于xxx等一大堆外设3.LL APIs函数全部定义为static inline函数,放在对应的头文件中,用户使用需要包含相关头文件4.参考这两个文档看看LL库文件在Cube库中的位置,有20多个文件,全部以stm32l4xx_ll_xxx.h命名:STM32Cube_FW_L4_V1.1.0\Drivers\STM32L4xx_HAL_Driver\IncSTM32L4是面向低功耗市场的,同时不失高性能,功耗和性能往往是两个矛盾的东西,ST在硬件设计上想了各种办法来实现兼顾低功耗高性能(例如各种低功耗模式,LP外设等),而在软件层面,程序也讲求效率,LL库全是直接操作寄存器,直接操作寄存器往往效率较高,而且函数定义为内联函数,调用函数时不是堆栈调用,而是直接把函数的代码嵌入到调用的地方,利于提高代码相率,我想这也是ST在STM32L4系列中推出这个直接操作寄存器的LL库的原因之一吧。
STMicroelectronics XNUCLEO 用户手册说明书
XNUCLEO USER MANUAL●Compatible with NUCLEO serials.●Arduino connectivity support, easy to connect with various Arduino shields and access themassive Arduino resources●ST Morpho headers provide full access to all STM32 I/Os, easy for peripheral expansion●Supports mbed, build prototype quickly by mbed SDK and online tools●Comprehensive free software HAL library including a variety of software examples●Comes with a separated ST-LINK/V2 module1ORDERING INFORMATIONTable 1: Xnucleo series product informationThe meaning of XNUCLEO-FXXXRY codification is as follows:●FXXX describes the STM32 MCU product line;●R describes the pin count (R for 64 pins);●Y describes the FLASH size (8 for 64K, B for 128K, C for 256K).2Features (1)Advantages (1)Ordering Information (2)1.Quick Start (5)1.1.Development tool installation (5)1.1.1.CP2102 Virtual COM Port driver installation (5)1.1.2.STM32 ST-LINK Utility installation (5)1.1.3.J-Link driver installation (5)1.2.Getting started (5)1.2.1.Hardware configurations (6)1.2.2.Observing the actions (6)2.Hardware configuration (7)2.1Power supply settings (7)2.1.1Power supply input from the USB connector (7)2.1.2Using CN2, VIN or E5V as external power supply (8)2.1.3External power supply output (9)2.2LED indicators (9)2.2.1FLASH LED (9)2.2.2PWR LED Power supply indicator (9)2.2.3Serial port working status LED indicators (10)2.3Push button (10)2.3.1USER button (10)2.3.2RESET button (10)2.4JP2 (IDD) jumper settings (10)2.4.1JP2 ON (10)32.4.2JP2 OFF (10)2.5USART communication (10)2.5.1Connecting the targeted MCU to serial port (10)2.5.2Communication between the targeted MCU and shield or extension board (11)2.6ADC or I2C communication (12)2.7SPI connector (12)2.8USB connector (13)2.9Solder bridges (13)2.10Extension connector (13)3.How to use mbed on STM32 Xnucleo platform (16)3.1How to compile and download program under mbed (16)3.1.1Program compiling (16)3.1.2Program downloading (16)3.2How to export the Keil program from mbed (17)4.Periphery module Demo (18)4.1Connection between the Xnucleo board and Peripherals (18)4.2Demo explanations (20)4.2.1Data display mode (20)4.2.2The meanings of the returned data (21)41.1.1.DEVELOPMENT TOOL INSTALLATIONSTM32 Xnucleo includes an onboard USB TO UART interface based on CP2102 (“serial port”hereafter) for code debugging. Before using this interface, you should install a CP2102 driverfirstly.Run the installer: .\Xnucleo \tools\CP2102 driver\PreInstaller.exeWhen the installation finished, connect the XNucleo board to a PC via the USB TO UART interface.And you will find the CP210x USB to UART Bridge Controller in the Device Manager, if the driver is installed successfully.Run the installer: .\Xnucleo user\tools\STM32 ST-LINK Utility\STM32 ST-LINK Utility_v3.4.0.exe (For more detailed information about installation and usage of STM32 ST-LINK Utility, pleaserefer to the document provided by ST: .\Xnucleo user\tools\STM32 ST-LINKUtility\Readme\STLINK Utility.PDF. You can also download the latest installer from the STwebsite).When the installation finished, connect the ST-LINK/V2(mini) module to a PC. You will find the STMicroelectronics STLink dongle in the Device Manager, if the driver is installed successfully.Run the installer:.\Xnucleo user\tools\JLinkARM\Setup_JLinkARM_V415e.exeWhen the installation finished, connect the J-Link emulator to a PC. You will find the J-Link driver in the Device Manager, if the driver is installed successfully.1.2.GETTING STARTEDPlease follow the sequence below to configure the STM32 Xnucleo board and launch the demo software:561) Jumper settings ● Set JP3 to U5V; ● Set JP2 to ON;2) Power supply and power selection●For using a USB power supply, connect the Xnucleo board to a PC with a USB cable through the onboard USB connector; ●For using an external power supply, connect the power supply socket CN2 on the Xnucleo board to a 6~12V power adapter. 3) Connect the ST-LINK/V2 (mini) debugger/programmer to the SWD connectorNotices: It is recommended to plug in the USB power supply or the external power supply before connecting the ST-LINK/V2(mini) module to the SWD interface. Otherwise, the ST-LINK/V2(mini) initialization may be failure.The blinking of the USER LED indicator will change from fast to slow or from slow to fast, when clicking the USER key.2.2.1POWER SUPPLY SETTINGSThe power supply of the STM32 Xnucleo board is provided either by the host PC through the USB cable, or by an external source:●VIN (7V~12V) or +3V3 power pins on CN6;●E5V(5V) pin on CN7;●CN2 power supply connector (7V~12V).In case VIN, E5V, +3V3 or CN2 is used to power the Xnucleo board, you should use an external power supply unit.All parts of the STM32 Xnucleo board and Shield can be powered from the ST-LINK/V2 (mini) USB connector by the host PC.In case the ST-LINK/V2 (mini) USB connector is used to power the Xnucleo board, the host PC will provide 150mA current at maximum as 3.3V voltage is outputted from the ST-LINK/V2 (mini) USB connector to the Xnucleo board. And 300mA current at maximum may be provided when 5V voltage is outputted to the Xnucleo board. In case of the board requiring the current more than 300mA, it should be mandatory to use an external power supply as explained in the next chapter.Each part of STM32 Xnucleo including the extension board can be powered by USB(U5V).However, if the maximum current consumption of the board exceeds 300mA, the USB may be damaged. When the board is power supplied by USB(U5V), a jumper must be connectedbetween pin 1 and pin 2 of JP5 as shown in Table 2.Table 2: Power-related jumper7U5V (ST-LINK VBUS) is used as power source when JP5 is set as shown below (Defaultsetting)CN2, VIN or E5V is used as power source when JP5 is set as shown belowCN2, VIN or E5V can be used as external power supply in case the current consumption of Xnucleo and its extension boards exceeds the allowed current on USB. In this condition, it is mandatory to power supply the board using the external power source firstly, then connect the USB cable and ST-LINK/V2 (mini) to the PC to ensure that the Xnucleo board can work properly.Table 3: External power source parametersNotices: The following power sequence procedure must be respected when using an external power source:1)Set JP3 to U5V;2)Connect the external power source to CN2, VIN or E5V;3)Power on the external power supply CN2, VIN: 7V~12V, or E5V: 5V;4)Check that PWR LED is turned ON;5)Connect the PC to USB connector or ST-LINK/V2(mini) on Xnucleo.89If this order is not respected, the board may be supplied by VBUS or ST-LINK/V2(mini) firstly, and the following risks may be encountered:If more than 300 mA current is needed by the board, the PC may be damaged or the current supply can be limited by the PC. As a consequence the board cannot work correctly.●When powered by CN2, VIN or E5V, the +5V (CN6 pin 5 or CN7 pin 18) can be used as output power supply for an Arduino shield or an extension board. In this case, the maximum current of the power source specified in Table 3 needs to be respected. ●The +3.3 V (CN6 pin 4 or CN7 pin 12 & 16) can be used also as power supply output. The current is limited by the maximum current capability of the regulator U4 (500 mA max).2.2LED INDICATORSThe LEDs on the STM32 Xnucleo board is used to provide information about the Xnucleo working status.Table 4: The relationship between LED and the pins of MCUIt is easy to use each LED by setting JP7. For XNUCLEO-F302R8, the pin PB13 is connected to the MCU pin D13. And for other XNUCLEO devices, the pin PA5 is connected to the MCU pin D13. When the I/O is HIGH value, the FLASH LED is on. And when the I/O is LOW, the FLASH LED is off.10The PWR LED default color is red. It indicates the power supply status of the STM32 Xnucleo board. The red LED indicates that the MCU part is powered by +5V.TX indicator is in green, and RX indicator in blue. The blinking TX indicator means the MCU of STM32 Xnucleo board is sending message to the targeted PC. The blinking RX indicator means the MCU of STM32 Xnucleo board is receiving message from the targeted PC.2.3PUSH BUTTON The USER button is connected to the I/O PC13(pin 2) of the targeted MCU by setting JP6 to ON;This RESET button is connected to NRST, and is used to reset the targeted MCU.2.4JP2 (IDD) JUMPER SETTINGS STM32 microcontroller is powered (default).When this jumper is removed, STM32 microcontroller is not powered. But you can connect an ammeter on the JP6 to measure the STM32 microcontroller current.2.5USART COMMUNICATIONThe USART2 interface available on PA2 and PA3 of the STM32 microcontroller can be connected to Virtual COM Port, STMicroelectronics Morpho connector or to Arduino connector.Please set the JP4 as follows, to connect the targeted MCU to serial port (For more information, please refer to Table 6 and Table 7).●Connect the RX/PA3 of JP4 to the TXD;●Connect the TX/PA2 of JP4 to the RXD.If the communication between the targeted MCU and shield or extension board is required, you should set the JP4 and the RX/D0 and TX/D1 on CN9 as follow (For more information, please refer to Table 6).●Connect the RX/PA3 of JP4 to the RX/D0;●Connect the TX/PA3 of JP4 to the TX/D1.In such case it possible to connect another USART (if another USART is available on the targeted MCU) to the targeted MCU through Virtual COM Port using flying wires as follow●Connect the TX/PC10/PC6 of JP4 to RXD;●Connect the RX/PC11/PC of JP4 to TXD.Here is the jumper setting for connecting to XNUCLEO-F030R8:●Connect the TX/PA9 of JP4 to RXD;●Connect the RX/PA10 of JP4 to TXD.Notices: You should select a proper USART by referring to Table 5 and make corresponding hardware configurations, according to your actual demand. The USARTs (USART1 and USART3) listed in this table are unavailable under mbed, since only USART2(PA2, PA3) is defined for mbed. Therefore, when the USART-related APIs (such as printf) are required under mbed, you should select USART2(PA2, PA3) to connect to Virtual COM Port or CN9 on the pins RX/D0 and TX/D1.Table 5: USART-related pins and jumpers1112Table 6: Connections of JP4 pinsTable 7: Connections of NUCLEO-F030R8 JP42.6ADC OR I2C COMMUNICATIONIf ADC or I2C communication is required, you can connect the ADC interface or the I2C interface to the Arduino connector or the ST Morpho connector by setting the JP5. Here are the relative settings to JP5:●The pins A4 and A5 of JP5 should be connected to the Arduino connector on the pins A4 and A5 (the pin 5 and the pin 6 of CN8) or the ST Morpho connector on the pins 36 and 38 of CN7 respectively; ● The pins SDA/PB9 and SCL/PB8 of JP5 corresponding to the I2C interface of STM32 MCU; ●The pins PC1/ADC and PC0/ADC of JP5 corresponding to the ADC interface of STM32 MCU.Table 8: Connections of JP5 pins2.7 SPI CONNECTORThe pins D11, D12 and D13 of Arduino connector are SPI interfaces. For XNUCLEO-F302R8, the pins PB13, PB14 and PB15 are connected to the pins D13, D12 and D11, respectively. And for other XNUCLEO devices, the pins PA5, PA6 and PA7 are connected to the pins D13, D12, and D11, respectively.2.8USB CONNECTORExcept the XNUCLEO-F030R8, all the other XNUCLEO devices have reserved a USB connectorwhich can be enabled by setting JP1 to ON.2.9SOLDER BRIDGESTable 9: solder bridgesNotes: All the other solder bridges present on the STM32 Xnucleo board are used to configure several IOs and power supply pins for compatibility of features and leads with STM32 MCU supported.2.10EXTENSION CONNECTORThe following figures show the signals connected by default to Arduino connectors (CN5, CN6, CN8, CN9) and to ST Morpho connector (CN7 and CN10), for each STM32 Xnucleo board.13Figure 1: XNUCLEO-F030R8Figure 2: XNUCLEO-F103RBFigure 3: XNUCLEO-F302RC14Figure 4: XNUCLEO-F401REFigure 5: XNUCLEO-F411RE153.Xnucleo series is fully compatible with Nucleo series and can run the Nucleo Demos directly.Therefore, you can develop your STM32 Xnucleo applications based on the applications ofSTM32 Nucleo. Table 10 gives the relationship between Xnucleo series and Nucleo series.Table 10: Relationships between Xnucleo series and Nucleo seriesThe operations presented in this document are based on XNUCLEO-F103RB. For differentXnucleo devices, there may be some differences in configuring the development environment.So users should operate according to the actual conditions.3.1HOW TO COMPILE AND DOWNLOAD PROGRAM UNDER MBEDIn this section, we only present the ways to compile and download program, since it does not have room to address every factor of mbed. For more detailed information about the usage of mbed, please refer to the documents provided by mbed organization.Here we take XNUCLEO-F103RB as an example. Start the mbed software, and open a program,no error, Compile Output will show “Success!” after the compiling is finished. And the fileNucleo_printf_NUCLEO_F103RB.bin will be generated. This file can be found in the specified save path (This save path is modifiable).1)Run the STM32 ST-LINK Utility, and select file->Open file. Then, open the fileNucleo_printf_NUCLEO_F103RB.bin.162)Connect the USB TO UART interface on the board to your PC with a USB cable, and thenconnect ST-LINK/V2(mini) module to download the .bin file. Then, set the JP5 to U5V. Forthe JP4 setting, please refer to Section 2.5 USART communication. The serial port should beconfigured according to Table 11.Table 11: Serial port configurationBaud rate 115200Data bit 8Stop bit 1Parity None3)When the program downloading finished, COM port will receive the following information:Hello World!This program runs since 1 second.This program runs since 2 seconds.This program runs since 3 seconds.This program runs since 4 seconds.This program runs since 5 seconds....At this time, the USER LED is blinking in the frequency of 0.5Hz. And the TX LED keepsblinking to indicate that STM32 Xnucleo is sending message to the PC.3.2HOW TO EXPORT THE KEIL PROGRAM FROM MBEDCircuit debugging are unavailable in mbed. However, mbed has “Import Program” and “Export Program” functions. You can export the programs in mbed as Keil programs to performdebugging.The mbed library file can also be exported, which includes the HAL library of STM32 MCU. Under the Keli environment, mbed libraries can be applied or modified directly, and can betransplanted into other applications.17The relative operations are as follow:In the mbed, open the program you want to export. Then, right click the program name in the Program Workspace, and select Nucleo_printf->Export Program, as Figure 6 shows.Figure 6: Exporting as Keil programIn the Export Toolchain pull-down menu of the pop-up window, select Keil μVision. Then, the programs in mbed can be exported as Keil programs and performed Keil debugging. For more detailed information, please refer to the Keil-related technical documents.4.PERIPHERY MODULE DEMOBesides Nucleo Demos, the Demos for different periphery modules provided by Waveshare are supported by Xnucleo series as well. The corresponding devices to the periphery module Demos include but not limited to: Temperature-Humidity Sensor, Rotation Sensor, Color Sensor, UV Sensor, Water Sensor, Moisture Sensor, Vibrating Sensor, Tilt Sensor, Laser Sensor, Gas Sensor, Sound Sensor, Flame Sensor, Hall Sensor, Metal Sensor, Infrared Reflective Sensor, OLED display module and so on. And these Demos for different periphery modules are integrated into a big Demo (“periphery module Demo” hereafter) for convenience.4.1CONNECTION BETWEEN THE XNUCLEO BOARD AND PERIPHERALSTable 12: Connection between the XNUCLEO and sensors1819Notices:●The pins VCC and GND of the sensors listed above should be connected to the pins VCC andGND of IO Expansion Shied. For more detailed information, please refer to IO ExpansionShied User Manual.●Some of the sensors may only lead out the pin AOUT or the pin DOUT. In this case, theadditional reserved pin(s) of IO Expansion Shied can be left unconnected. One IO ExpansionShied can only connect one sensor at a time.4.2DEMO EXPLANATIONSWhen the Demo is running, the LED1 on the XNUCLEO board will blink at the rate of every 2seconds.For the periphery module Demo, there are two modes for displaying the returned information from the module: OLED and Screen Print (relative information is sent to the PC via the serial port every 500 ms). Here is an example:Figure 7: OLED displays relative sensor parameters2021At the same time, relative data will be outputted:/*----------------------*/T: 23 C H: 34D: 3868 A: 3.116 S: OFFRot: 227 SW: 52R: 20G: 6 B: 105RTC: 12:1:4 KEY: 10/*----------------------*/Table 13: The meanings of relative symbols22。
STM32 Nucleo 扩展板 电机控制 选型指南说明书
STM32 Nucleo扩展板STM32 ODE快速、经济的原型设计和开发STM32开放开发环境(ODE)在一个开放、灵活、简单、经济的开发环境下,基于STM32位微控制器,结合其他通过扩展板连接的ST尖端原件,从而快速进行原型设计,迅速转换为最终设计。
STM32 ODE包括下述五个单元:• STM32 N ucleo开发板。
全面的经济型开发板,适用于所有STM32微控制器系列,具有无限的统一扩展能力,具有集成的调试器/编程器。
• STM32 N ucleo扩展板。
该扩展板具有更多功能,能按需增加传感、控制、连接、供电、音频或其他功能,可以插在STM32 Nucleo开发板上,更复杂的功能可以通过堆叠更多的扩展板来实现。
• STM32Cube软件。
协助迅捷地在STM32上开发的一套免费工具和嵌入式软件模块,包括硬件抽象层、中间件和STM32CubeMX 基于PC的配置器和代码生成器。
• STM32Cube扩展软件。
该扩展软件免费提供,与STM32 Nucleo扩展板配置使用,兼容STM32Cube软件框架。
• STM32Cube功能包。
功能案例集合包含一些最常见的应用样例,这些案例均利用STM32 N ucleo开发板和扩展板、STM32Cube软件和扩展的模块化和互操作性构建。
STM32开放式开发环境兼容许多IDE(包括STM32CubeIDE、IAR EWARM、Keil MDK-ARM和GCC/基于LLVM的IDE),能够集成各种组件,如STM32CubeMX、STM32CubeProgrammer或STM32CubeMonitor。
详情请访问/stm32ode23众多可扩展板的组合不仅基于先进商用产品,而且提供了模块化软件,从驱动器到应用层,可实现方案的快速成型,顺利转化为最终设计。
如需开始您的设计:• 选择符合您所需功能的合适STM32 N ucleo 开发板(MCU )和扩展(X-NUCLEO )板(传感器、连接、音频、电机控制等)• 选择您的开发环境(IAR EWARM 、Keil MDK 和基于GCC 的IDE ),并使用免费的STM32Cube 工具和软件,如STM32CubeMX 、STM32CubeProgrammer 、STM32CubeMonitor 或STM32CubeIDE 。
芯达STM32用户使用手册
STM32F103VET6芯达 STM32○RUser's ManualPreliminaryRevision 1.0(2010.06.08) 芯达STM32开发板开发指南Copyright © 2009‐2010 ARM79 Limited. All rights reserved版本信息本手册进行了以下更改。
芯达STM32用户手册修订记录日期 修订版本 CR ID 修改章节 修改描述 作者 2010-5-28 1.00 全部 创建 林辰 2010-8-16 1.10 去掉蜂鸣器、AT45 林辰 2010-8-20 1.20 增加外扩接口、修林辰改外观图片版权声明本手册版权归属(以下简称“arm79”)所有, 并保留一切权力。
非经arm79同意(书面形式),任何单位或个人不得擅自摘录本手册部分或全部,违者我们将追究其法律责任。
敬告:在售开发板的手册会经常更新,请在网站查看最近更新,并下载最新手册,不再另行通知。
目录目录 (4)写在前面 (5)第一章芯达STM32光盘使用说明 (6)第二章芯达STM32硬件说明 (8)2.1 芯达STM32板载资源说明 (8)2.2 芯达STM32原理图说明 (9)2.2.1电源电路 (9)2.2.2 实时时钟(备用电池)电路 (9)2.2.3 系统时钟电路 (9)2.2.4 JTAG接口电路 (10)2.2.5 复位电路 (10)2.2.6 用户LED电路 (10)2.2.7 串口电路 (11)2.2.8 按键电路 (11)2.2.9 SD卡接口电路 (12)2.2.10 USB接口电路 (12)2.2.11 LCD TFT液晶接口电路 (13)2.2.12 外扩IO接口电路 (13)第三章芯达STM32开发前的准备 (15)3.1 J-Link驱动的安装 (15)3.2 使用J-Link下载调试 (18)3.3使用ISP下载调试 (25)3.3.1 安装Flash loader (25)3.3.2 使用ISP下载调试 (28)3.4安装RealView MDK软件 (34)3.5使用MDK + J-Link调试 (38)第四章芯达STM32初步开发举例 (49)4.1 下载固件库 (49)4.2 STM32简单开发 (50)附福州芯达工作室简介 (54)写在前面感谢您选购芯达STM32开发板产品!请详细阅读以下文字,以获取对芯达STM32开发板的更多信息。
STM32 Nucleo + X-NUCLEO-IHM03A1 高功率步进电机驱动板用户手册说明书
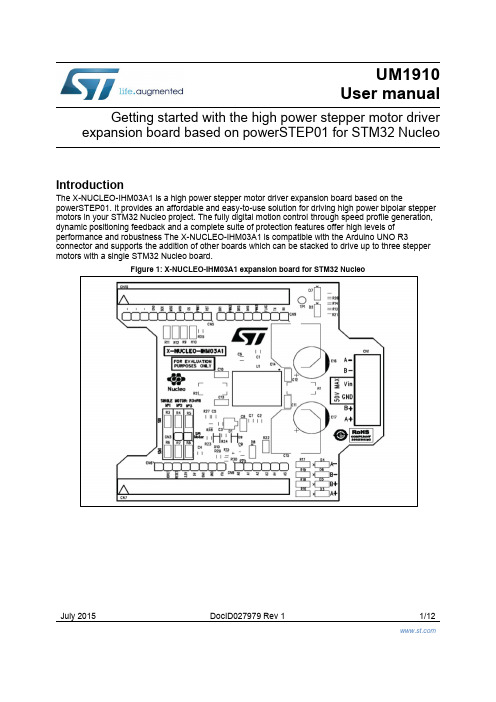
July 2015 DocID027979 Rev 1 1/12UM1910 User manualGetting started with the high power stepper motor driver expansion board based on powerSTEP01 for STM32 NucleoIntroductionThe X-NUCLEO-IHM03A1 is a high power stepper motor driver expansion board based on thepowerSTEP01. It provides an affordable and easy-to-use solution for driving high power bipolar stepper motors in your STM32 Nucleo project. The fully digital motion control through speed profile generation, dynamic positioning feedback and a complete suite of protection features offer high levels of performance and robustness The X-NUCLEO-IHM03A1 is compatible with the Arduino UNO R3connector and supports the addition of other boards which can be stacked to drive up to three stepper motors with a single STM32 Nucleo board.Figure 1: X-NUCLEO-IHM03A1 expansion board for STM32 NucleoContents UM1910 Contents1Getting started (3)2Hardware description and configuration (4)2.1Selecting the chip select and clock lines of the SPI (6)2.2Multi-motor configuration (6)3Revision history (11)UM1910Getting started1 Getting startedThe X-NUCLEO-IHM03A1 expansion board is a high power stepper motor driver covering a wide range of applications. In particular, the maximum ratings of the board are the following. ∙ Power stage supply voltage (VS) from 10.5 V to 50 V ∙ Motor phase current up to 10 A r.m.s.Follow this sequence to start your project with the board:1. Check the jumper position based on your configuration (see Section 2: "Hardware description and configuration").2. Plug the board to the STM32 Nucleo board through Arduino UNO R3 for the X-NUCLEO-IHM03A1.3. Supply the board through the input 1 (VS) and 2 (ground) of the connector CN1. The power OK (green) and fault (red) LEDs will turn on.4.Develop your application using the examples provided with the firmware library, X-CUBE-SPN3, high power stepper motor driver software expansion for STM32Cube. Further support material is available on the powerSTEP01 (/powerstep) and STM32 Nucleo web pages (/stm32nucleo).Up to three expansion boards can be stacked on the same STM32 Nucleo board as described in Section 2.2: "Multi-motor configuration".2 Hardware description and configurationFigure 2: "Jumper and connector positions" shows the position of the connectors and theconfiguration jumpers of the board.Figure 2: Jumper and connector positionsBelow are the pinout details for the Arduino UNO R3 and the ST Morpho connectors.Notes:(1)All the unlisted pins are not connected.Notes:(1)All the unlisted pins are not connected.2.1 Selecting the chip select and clock lines of the SPIThe chip select and the clock lines of the SPI interface can be selected via the appropriateresistors indicated in Table 3: "Chip select line selection" and Table 4: "Clock lineselection".2.2 Multi-motor configurationThe expansion boards can be stacked on a single STM32 Nucleo board in order to drive upto the three stepper motors (one expansion board for each motor is required).The configuration is changed by mounting the resistors from R3 to R8 as listed in Table 5:"Multi-motor setup table".The other resistors are not mounted.By default, the stepper driver board is configured for a single-motor setup, so the boardconfiguration must be changed in multi-motor setups before stacking the boards on theSTM32 Nucleo.UM1910 Revision history 3 Revision historyUM1910IMPORTANT NOTICE – PLEASE READ CAREFULLYSTMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of or der acknowledgement.Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of Purchasers’ products.No license, express or implied, to any intellectual property right is granted by ST herein.Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.Information in this document supersedes and replaces information previously supplied in any prior versions of this document.© 2015 STMicroelectronics – All rights reserved。
STM32开发板使用说明
STM32开发板使用说明1、开发板使用到的软件及安装说明在开始学习开发板之前需要安装的软件有:1、KEIL3.80A,2、PL-2303HX驱动,3、串口调试助手,4、下载器MCUISP。
这些软件在课件文件下面的软件文件里。
具体安装步骤如下:1.KEIL3.80A的安装,打开路径:课件\软件\KEIL3.80A\MDK3.80A安装手册,根据上面的步骤安装软件。
2.PL-2303HX驱动的安装,打开路径:课件\软件\PL-2303HX新版驱动,可根据使用电脑的操作系统来选择安装的软件,如选择安装XP驱动,可打开XP驱动,根据里面的安装说明来安装软件。
一般只要运行PL-2303 Driver Installer。
exe就可以了。
3.串口调试助手的安装,打开路径:课件\软件\串口调试助手,点击sscom33。
exe即可,也可以创建快捷方式在桌面。
4.下载器MCUISP的安装,打开路径:课件\软件\下载器MCUISP,点击mcuisp。
exe 即可,也可以创建快捷方式在桌面。
2、开发环境介绍及使用说明首先是我们之前安装的keil3.80a。
再点击Project->New uVision Project如下图所示:弹出create new project 对话框,新建一个文件夹TEST,然后把工程名字设为test。
点击保存。
弹出选择器件的对话框,因为我们的开发板使用的是STM32F103RBT6 ,所以在这里我们选择STMicroelectronics 下面的STM32F103RB( 如果使用的是其他系列的芯片,选择相应的型号就可以了)。
如下图所示:点击OK,MDK会弹出一个对话框,问你是否加载启动代码到当前工程下面,这里我们选择是。
启动代码是一段和硬件相关的汇编代码。
是必不可少的!在上面点击了是以后,MDK 就把启动代码STM32F10x。
s 加入到了我们的工程下面。
如下图所示:到这里,我们就可以开始编写自己的代码了。
STM32nucleo_L476RG使用指南

为了使用以前的 printf 函数,首先需要引入库函个新的 fputc 函数 //Retargets the C library printf function to the UART. int fputc(int ch, FILE *f) {
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF); return ch; } 这样就可以兼容以前开发的 F103 的功能函数了。 注意:如果系统中需要多个串口,需要对 printf 进行二次封装,自己开发 USRAT_printf 函数,其原理是,每次在使 用 printf 函数前,先变换此函数的对应的输出设备的句柄,例如换成串口 1,串口 2。 利用 printf 函数输出串口数据,效率一般。
digitalHi(GPIOA,GPIO_PIN_5)
#define LED3_ON
digitalLo(GPIOA,GPIO_PIN_5)
四、串口函数的使用
1.发送函数
HAL_UART_Transmit(&huart2,"HELLO\n",30,3); 其中,第一个参数比较变态 UART_HandleTypeDef huart2; UART_HandleTypeDef 为系统定义的一个结构体。