【系统仿真学报】_模式识别 2014-07-23 07_13_19_期刊发文热词逐年推荐_20140723
国内通信和信息类EI及中文核心期刊投稿攻略

目前国内已经没有EI PageOne了,EI只有Compendex。
学报里面编辑部差劲的毕竟属于少数,关键是审你稿子的审稿人如何。
不少的审稿人其实都是博导的学生代劳的,碰上1-2个不懂瞎锯的只能认倒霉,当然也要特别注意一种情况,就是某些审稿人(学生的可能性比较大),和你的研究方向一样,又苦于没有idea,很可能借当审稿人之利把你的稿子审了又审,修了又修,拖上你一年半载的,最后再来锯你一下。
等你傻呼呼准备另投他刊的时候,人家已经利用和期刊的暧昧关系抢先发了你的idea,这就是博导牛与不牛最大的区别,绝不是空穴来风。
所以碰上这种情况,一味要求作者不要一稿多投从某种意义上来讲也算是一种霸王条款。
碰上这种情况,最好找师兄问清楚,审稿周期长、喜欢瞎折腾的期刊一律不投,或者干脆写英文稿投国外,起码国外的风气还不是很糟糕。
另外一定要注意在毕业以后把这种期刊利用博客、论坛公诸于众,打击一下这些冠审稿人之名,行学术小偷之实的嚣张气焰。
【杂志名称】电子学报【杂志文章主要专业方向】主要涉及电子与信息科学及相邻领域的原始性科研成果【投稿的联系方式】北京165信箱(100036),地址北京海淀区普惠南里13号楼【投稿费用】审稿费中文150元;英文180元【杂志级别】一级学报, 中文EI Compendex,英文版SCIE收录【电话】(010),现在审稿周期较长,半年前投的论文到现在二个审稿意见都还没回。
另外,建议投稿的朋友注意论文的写作方法与相应刊物的要求,态度要认真,投稿前自己多审几次,我给上面的某两个刊物审了几年稿,对那种语句不清,错误字较多,不严谨,态度不端正的稿件基本上毙掉,曾经与同行就这个问题交流,也有这方面共识。
公布审稿意见,有帮助。
(个人觉得该刊才得上是国内电子信息和通信类期刊的老大)【杂志名称】电子与信息学报【杂志文章主要专业方向】主要涉及信号处理、通信等内容。
【投稿及联系方式】可在线投稿,北京2702信箱《电子与信息学报》编辑部,100080【投稿费用】审稿费100元【杂志级别】核心,EI Compendex收录【电话】0【网址】【投稿感受】投稿时请寄一式三份打印稿,排版成word文档,单栏、单面、小五号字、单倍行距,字迹端正清楚,图、表、参考文献齐全,并提供摘要和3~5个关键词。
系统仿真学报最新进展
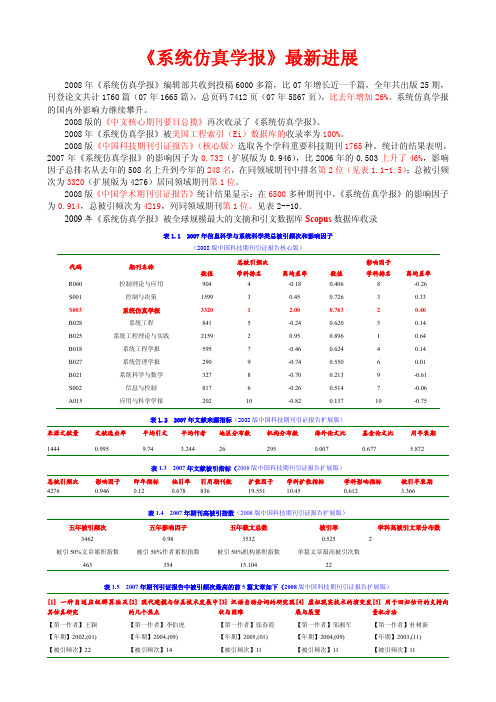
《系统仿真学报》最新进展2008年《系统仿真学报》编辑部共收到投稿6000多篇,比07年增长近一千篇,全年共出版25期,刊登论文共计1760篇(07年1665篇),总页码7412页(07年5867页),比去年增加26%。
系统仿真学报的国内外影响力继续攀升。
2008版的《中文核心期刊要目总揽》再次收录了《系统仿真学报》。
2008年《系统仿真学报》被美国工程索引(Ei )数据库的收录率为100%。
2008版《中国科技期刊引证报告》(核心版)选取各个学科重要科技期刊1765种。
统计的结果表明,2007年《系统仿真学报》的影响因子为0.732(扩展版为0.946),比2006年的0.503上升了46%,影响因子总排名从去年的508名上升到今年的248名,在同领域期刊中排名第2位(见表1.1-1.5);总被引频次为3320(扩展版为4276)居同领域期刊第1位。
2008版《中国学术期刊引证报告》统计结果显示:在6500多种期刊中,《系统仿真学报》的影响因子为0.914,总被引频次为4219,列同领域期刊第1位。
见表2--10。
2009年《系统仿真学报》被全球规模最大的文摘和引文数据库Scopus 数据库收录表1.1 2007年信息科学与系统科学类总被引频次和影响因子(2008版中国科技期刊引证报告核心版)代码 期刊名称总被引频次 影响因子 数值学科排名离均差率 数值 学科排名离均差率 R060 控制理论与应用 904 4 -0.18 0.406 8 -0.26 S001 控制与决策 1599 3 0.45 0.726 3 0.33 S003 系统仿真学报 3320 1 2.00 0.763 2 0.40 B028 系统工程 841 5 -0.24 0.620 5 0.14 B025 系统工程理论与实践 2159 2 0.95 0.896 1 0.64 B018 系统工程学报 595 7 -0.46 0.624 4 0.14 B027 系统管理学报 290 9 -0.74 0.550 6 0.01 B021 系统科学与数学 327 8 -0.70 0.213 9 -0.61 S002 信息与控制 817 6 -0.26 0.514 7 -0.06 A015应用与科学学报20210-0.820.13710-0.75表1.2 2007年文献来源指标(2008版中国科技期刊引证报告扩展版)来源文献量 文献选出率 平均引文 平均作者 地区分布数 机构分布数 海外论文比 基金论文比 引用半衰期 14440.9959.743.244262950.0070.6775.872表1.3 2007年文献被引指标(2008版中国科技期刊引证报告扩展版)总被引频次 影响因子 即年指标 他引率 引用期刊数 扩散因子 学科扩散指标 学科影响指标 被引半衰期 42760.9460.120.67883619.55110.450.6123.366表1.4 2007年期刊高被引指数(2008版中国科技期刊引证报告扩展版)五年被引频次五年影响因子五年载文总数被引率 学科高被引文章分布数34620.9835320.5252 被引50%文章累积指数被引50%作者累积指数被引50%机构累积指数单篇文章最高被引次数46335415.10422表1.5 2007年期刊引证报告中被引频次最高的前5篇文章如下(2008版中国科技期刊引证报告扩展版)[1] 一种自适应蚁群算法及其仿真研究 [2] 现代建模与仿真技术发展中的几个焦点 [3] 汉语自动分词的研究现状与困难[4] 虚拟现实技术的演变发展与展望[5] 用于回归估计的支持向量机方法【第一作者】王颖 【第一作者】李伯虎 【第一作者】张春霞 【第一作者】邹湘军 【第一作者】杜树新 【年期】2002,(01) 【年期】2004,(09) 【年期】2005,(01) 【年期】2004,(09) 【年期】2003,(11) 【被引频次】22【被引频次】14【被引频次】11【被引频次】11【被引频次】11表2 系统仿真学报引证指标统计表中国学术期刊综合引证报告(2008版)统计年载文量基金论文比总被引频次他引总引比影响因子5年影响因子即年指标被引半衰期Web即年下载率2007 1444 0.68 4219 0.67 0.914 0.968 0.117 3.4 50.8 2006 915 0.63 2536 0.79 0.635 0.782 0.036 3.4 61.2 2005 826 0.58 1824 0.83 0.584 0.758 0.031 3.3 33.1 2004 781 0.56 1123 0.79 0.538 0.660 0.037 3.0 52.4 2003 512 745 0.8121 0.5161 0.0313 2.92002 471 480 0.7083 0.5791 0.0488 2.72001 244 263 0.7376 0.5267 0.0574 2.52表3 系统仿真学报访问用户来源统计表(总报表:2005-2008年) 地域名称下载频次浏览数访问量亚洲782700 881463 1664163欧洲10687 18523 29210北美洲403 2138 2541大洋洲125 150 275非洲 1 7 8表5 系统仿真学报专业引用情况统计表(总报表:1980-2008年)专业名称文献数引用频次信息科技5902 14594工程科技Ⅱ辑1464 2378基础科学227 435工程科技Ⅰ辑129 254经济与管理科学35 123社会科学Ⅰ辑38 88医药卫生科技21 78农业科技9 7社会科学Ⅱ辑 2 1哲学与人文科学7 0 表4 系统仿真学报学科引用情况统计表(总报表:1980-2008年) 学科导航文献数引用频次工业技术6349 15143交通运输278 553航空、航天309 353军事164 299经济53 159数理科学和化学104 154自然科学总论23 137天文学、地球科学45 53环境科学、安全科学18 52医药、卫生21 49社会科学总论 3 6农业科学8 3文化、科学、教育、体育24 1政治、法律 1 1综合性图书 6 0生物科学 4 0历史、地理 3 0语言、文字 1 0表6 系统仿真学报专业网络传播情况统计表(总报表:2005-2008年)专业名称下载频次浏览数访问量信息科技603193 681726 1284919工程科技Ⅱ辑148265 171124 319389基础科学21800 25270 47070工程科技Ⅰ辑10624 13273 23897经济与管理科学4187 4793 8980社会科学Ⅰ辑3459 3447 6906医药卫生科技1717 1877 3594农业科技543 629 1172社会科学Ⅱ辑75 88 163哲学与人文科学53 55 108表7 系统仿真学报单篇文献引用情况统计表(年报表:2000-2008年)(部分)文献标题作者出版年出版期引用频次虚拟实验室网络体系结构研究李仁发,周祖德,李方敏,陈幼平,彭欢宇2002 03 74现代建模与仿真技术发展中的几个焦点李伯虎,柴旭东,朱文海,邸彦强等2004 09 69基于HLA的分布交互仿真应用系统开发研究郝江波,卿杜政,欧阳伶俐,宋星2000 05 64基于Vega的视景驱动软件的分析与设计李军,王绍棣,常建刚,孙知信等2003 03 61复杂物流系统仿真及其研究现状朱卫锋,费奇2003 03 58 HLA/RTI的研究与实现姚益平,时向泉,万江华2000 04 50基于粒子系统的实时雨雪模拟王润杰,田景全,倪政国2003 04 48基于海浪谱的波浪模拟杨怀平,孙家广2002 09 47 HLA运行支撑框架(SSS-RTI)的研究与开发卿杜政,李伯虎2000 05 46随机海浪模型的建立及仿真分析邱宏安2000 03 46 MATLAB在模糊控制系统设计和仿真的应用李祖欣2003 01 44遗传算法在神经网络控制中的应用与实现杨国军,崔平远,李琳琳2001 05 43面向虚拟装配的装配顺序规划研究卢小平2003 01 42系统科学及系统复杂性研究戴汝为2002 11 41 SWARM—一个支持人工生命建模的面向对象模拟平台丁浩,杨小平2002 05 40文献标题作者出版年出版期下载频次浏览数访问量《系统仿真学报》2004年第16卷总目次2004 12 1322 152 1474 基于Matlab无刷直流电机系统仿真建模的新方法纪志成,沈艳霞,姜建国2003 12 1082 1470 2552现代建模与仿真技术发展中的几个焦点李伯虎,柴旭东,朱文海,邸彦强,王鹏,施国强,谭娟,殷润民,侯宝存2004 09 1072 1011 2083基于Matlab交流异步电机矢量控制系统的仿真建模纪志成,薛花,沈艳霞2004 03 995 1249 2244 快变衰落信道的Matlab仿真及其应用代光发,陈少平2005 01 924 1106 2030基于MATLAB仿真的神经网络控制器的设计与实现王桂娟,徐红东,王佐勋,许强,张元国2005 03 829 721 1550移动机器人路径规划技术的现状与展望张捍东,郑睿,岑豫皖2005 02 787 800 1587 建模与仿真技术发展趋势分析杨明,张冰,王子才2004 09 760 766 1526基于SIMULINK的现代通信系统仿真分析席在芳;邬书跃;唐志军;曾照福;2006 10 750 1028 1778物流系统仿真研究综述李永先;胡祥培;熊英; 2007 07 730 1033 1763 汉语自动分词的研究现状与困难张春霞,郝天永2005 01 701 804 1505 复杂物流系统仿真及其研究现状朱卫锋,费奇2003 03 701 742 1443虚拟现实技术的演变发展与展望邹湘军,孙健,何汉武,郑德涛,陈新2004 09 697 698 1395虚拟样机技术熊光楞,李伯虎,柴旭东2001 01 696 821 151 表9 科技与生产\技术\自动化(中国学术期刊综合引证报告--2008版)序号刊名总被引频次他引总引比影响因子h指数Web即年下载率1 系统仿真学报4219 0.67 0.914 26 50.82 控制与决策2195 0.94 0.907 24 82.63 自动化学报1661 0.97 0.572 15 75.94 控制理论与应用1410 0.94 0.555 15 53.55 传感器与微系统1021 0.90 0.429 13 33.26 信息与控制1019 0.97 0.669 20 53.97 机器人934 0.92 0.731 19 66.68 传感技术学报861 0.65 0.431 13 45.89 控制工程823 0.78 0.887 16 28.710 液压与气动557 0.83 0.217 11 20.811 制造业自动化551 0.95 0.302 13 26.212 模式识别与人工智能485 0.92 0.384 ——13 化工自动化及仪表468 0.78 0.444 13 22.514 自动化技术与应用429 0.92 0.259 13 28.615 自动化与仪器仪表315 0.97 0.316 10 34.316 冶金自动化300 0.92 0.312 10 20.517 工矿自动化280 0.88 0.278 9 29.718 机械制造与自动化257 0.94 0.197 12 27.619 传感器世界240 0.93 0.305 9 33.320 液压气动与密封233 0.78 0.282 9 18.121 电气传动自动化223 0.98 0.187 10 28.222 自动化与仪表214 1.00 0.226 8 37.923 指挥控制与仿真199 0.81 0.256 6 27.724 自动化博览174 0.99 0.168 12 19.025 电气自动化154 0.91 0.099 ——26 精密制造与自动化146 0.92 0.333 9 24.227 机器人技术与应用142 0.99 0.099 11 30.428 Journal of Control Theory and Applications 55 0.80 0.220 3 16.429 自动化与信息工程51 0.94 0.154 6 24.030 传动技术46 0.91 0.164 5 27.031 流体传动与控制43 0.88 0.104 3 15.732 智能系统学报33 0.91 0.112 4 56.833 系统仿真技术12 0.92 0.119 —39.134 International Journal of Automation and Computing 8 1.00 0.077 — 5.6表10 科技与生产\技术\自动化(中国学术期刊综合引证报告--2008版)序号刊名影响因子即年指标5年影响因子总被引频次1 系统仿真学报0.914 0.117 0.968 42192 控制与决策0.907 0.085 1.028 21953 控制工程0.887 0.080 0.824 8234 机器人0.731 0.058 0.960 9345 信息与控制0.669 0.045 0.883 10196 自动化学报0.572 0.044 0.927 16617 控制理论与应用0.555 0.039 0.747 14108 化工自动化及仪表0.444 0.054 0.423 4689 传感技术学报0.431 0.083 0.514 86110 传感器与微系统0.429 0.017 0.481 102111 模式识别与人工智能0.384 0.000 —48512 精密制造与自动化0.333 0.000 0.289 14613 自动化与仪器仪表0.316 0.041 0.297 31514 冶金自动化0.312 0.068 0.289 30015 传感器世界0.305 0.024 0.319 24016 制造业自动化0.302 0.018 0.310 51117 液压气动与密封0.282 0.263 0.252 23318 工矿自动化0.278 0.015 0.266 28019 自动化技术与应用0.259 0.007 0.272 42920 指挥控制与仿真0.256 0.036 0.249 19921 自动化与仪表0.226 0.007 0.185 21422 Journal of Control Theory and Applications 0.220 0.029 —5523 液压与气动0.217 0.024 0.226 55724 机械制造与自动化0.197 0.015 0.189 25725 电气传动自动化0.187 0.000 0.276 22326 自动化博览0.168 0.009 0.199 17427 传动技术0.164 0.033 0.189 4628 自动化信息与工程0.154 0.035 0.128 5129 系统仿真技术0.119 0.019 —1230 智能系统学报0.112 0.035 —3331 流体传动与控制0.104 0.018 —4332 机器人技术与应用0.099 0.000 0.346 14233 电气自动化0.099 0.019 —15434 International Journal of Automation and Computing 0.077 0.000 —8本类目计量指标平均值0.344 0.039 —581。
MATLAB 系统辨识 仿真工具箱
收稿日期:2005-03-31
修回日期:2005-11-28
基金项目:清华大学研究生精品课建设工程项目(70250283)
作者简介:倪博溢(1982-), 男, 江苏启东人, 博士生, 研究方向为系统辨
识与建模; 萧德云(1945-), 男, 福建人, 教授、博导, 研究方向为辨识建
模、故障诊断、混合动态系统、多传感器融合、计算机应用等。
第 18 卷第 6 期 2006 年 6 月
系 统 仿 真 学 报© Journal of System Simulation
Vol. 18 No. 6 Jun., 2006
MATLAB 环境下的系统辨识仿真工具箱
倪博溢,萧德云
(清华大学自动化系, 北京 100084)
摘 要:介绍了在 MATLAB 环境下构建一种新的系统辨识仿真工具箱(SIST: System Identification
本文由 5 部分内容组成:(1) 辨识基本理论,(2) 辨识 流程的计算机实现,(3) 系统辨识仿真工具箱的设计,(4) 加 热炉模型辨识的应用实例,(5) 结论。
1 辨识基本理论
对于一个系统,在输入输出数据的基础上,从一组给定 模型类中,确定一个与所测系统等价的模型,这种方法叫做 辨识。辨识方法是在实际应用中获取系统模型的最为重要的 手段之一,也是数学模型和实际应用联系的纽带。系统的测 得数据用 h(k)表示,输出用 z(k)表示,辨识模型的输出估计 为 zˆ(k) ,实际输出与它的偏差为 z(k) 。辨识就是通过某种算 法,利用模型输出与实际输出间的误差不断纠正模型参数, 最终得到最优模型的过程[4]。
获取输入数据 获取输出数据
选择辨识算法
数据预处理 选择辨识算法
基于模糊神经网络的混合动力汽车控制策略仿真

基于模糊神经网络的混合动力汽车控制策略仿真
钱立军;袭著永;赵韩
【期刊名称】《系统仿真学报》
【年(卷),期】2006(18)5
【摘要】为保证多能源系统转矩的合理分配,建立了模糊逻辑控制模型,并采用ANFIS优化算法,对建立的混合动力汽车模糊控制模型进行优化。
通过对ANFIS神经网络模型进行训练、测试和仿真分析,结果表明:模糊控制模型的隶属函数得到了
优化,将优化模型应用于整车仿真,与模糊逻辑控制策略相比,燃油经济性提高5.4%。
【总页数】4页(P1384-1387)
【关键词】混合动力电动汽车;控制策略;优化;神经网络;仿真
【作者】钱立军;袭著永;赵韩
【作者单位】合肥工业大学机械与汽车工程学院
【正文语种】中文
【中图分类】TP183;U469
【相关文献】
1.插电式并联混合动力汽车模糊控制策略设计与仿真 [J], 程飞;赵韩;尹安东;王若
飞
2.基于模糊逻辑控制策略的混合动力汽车仿真研究 [J], 姚明亮;秦大同;胡明辉;叶
心
3.神经网络工况识别的混合动力电动汽车模糊控制策略 [J], 田毅;张欣;张良;张昕
4.并联混合动力汽车动力源参数设计及模糊控制策略的建模仿真分析 [J], QI Jinfeng
5.基于变结构模糊控制器的混合动力汽车控制策略及仿真 [J], 王书帅;袁银南;苏涛因版权原因,仅展示原文概要,查看原文内容请购买。
基于特征结构配置的结构主动控制及仿真

第18卷第6期系统仿真学报©V ol. 18 No. 6 2006年6月Journal of System SimulationJun., 2006基于特征结构配置的结构主动控制基于特征结构配置的结构主动控制及仿真及仿真王国胜1吕强1梁冰2段广仁2(1.装甲兵工程学院控制工程系, 北京 100072;2.哈尔滨工业大学控制理论与制导技术研究中心, 哈尔滨150001)摘要考虑了具有最优控制的结构主动控制问题目的是在系统满足闭环特性的前提下设计状态反馈控制器使得系统性能泛函极小化利用特征结构配置方法提供的自由度给出了性能泛函的显示参数化表示从而该问题转化为带有约束条件的优化问题参与优化的变量仅为一组参量并给出了求解该优化问题的算法该算法直接基于结构系统矩阵故其简单性为工程应用提供方便地震作用下对三层剪切结构建筑模型进行仿真分析结果表明所提结构主动控制方法的有效性关键词结构系统主动控制特征结构配置地震控制优化中图分类号TP13; TP271 文献标识码 A 文章编号1004-731X (2006) 06-1605-04 Structural Active Control Based on Eigenstructure Assignment and Its SimulationsWANG Guo-sheng1, LV Qiang1, LIANG Bing 2, DUAN Guang-ren 2(1.Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China;2.Center for Control Theory and Guidance Technology, Harbin Institute of Technology, Harbin 150001, China)Abstract: The design of structural active control with minimum control effort was investigated. The aim is to design a statefeedback controller, that the closed-loop system has desired eigenvalues, and a system performance function is optimized. By utilizing design degrees of freedom offered by parametric eigenstructure assignment, a parametric expression for the system performance index was proposed. Thus the optimization problem was changed into a minimization problem with someconstraints and the optimized variables are a group of parameters. An algorithm was proposed for this minimization and utilized the original system data, and thus it is simple to use in applications. A three-story shearing model under earthquake excitation was analyzed by using the proposed algorithm and the simulation results show the effect of this algorithm.Key words: structural systems; active control; eigenstructure assignment; earthquake control; optimization.引言自从1972年美国Yao[1]结合现代控制理论提出了土木工程结构振动控制的概念开创了结构振动的主动控制研究的历程结构振动控制从理论到应用都取得了很大进展结构振动控制方法按照控制系统有无能源输入分为主动控制被动控制半主动控制和混合控制等其中主动控制是一种积极的抗振手段具有效果好适用范围广等优点成为国内外相关领域研究的前沿课题[2-3]近30年来应用和发展起来的适用于土木结构的主动控制算法主要包括二次型最优控制独立模态最优控制极点配置和滑动模态控制等极点配置或特征结构配置作为土木工程结构的主动控制算法之一虽然很早被提出但在土木结构领域中的应用却很少可查到的文献很少见文献[4]本文则把特征结构配置参数化方法[5-6]和最优控制问题相结合引入土木结构领域中考虑了具有最优控制力的结构主动控制问题其目的是设计状态反馈控制器使得闭环系统具有希望的极点外还使得系统性能泛函极小化利用收稿日期2005-04-28修回日期2006-03-03基金项目国家杰出青年基金(69925308)作者简介王国胜(1975-), 男, 河北唐山人, 讲师, 博士, 研究方向为线性系统理论结构控制理论鲁棒控制理论及应用; 吕强(1962-), 男, 黑龙江人, 教授, 博导, 博士, 研究方向为神经网络控制火力控制及应用特征结构配置方法提供的自由度给出了性能指标参数化表达式把优化问题最终转化为含有约束条件的极小化问题参与优化的变量为特征结构配置方法提供的自由参量给出了解决该优化问题的方法该方法直接基于结构系统矩阵不涉及系统增广或变换其简单性为工程应用提供了方便最后应用该算法设计了地震作用下三层剪切结构建筑模型的状态反馈控制器仿真结果表明了本文所提方法的有效性1 结构系统状态空间模型考虑在水平地震地面运动加速度)(tx g 作用下n 自由度的层间剪切型结构模型其运动方程为)()()()()(1txMItHutKXtXCtXM gn×−=++(1)式中)(tX )(tX 和)(tX 分别为各楼层相对于地面的位移速度加速度向量)(tu为r维控制力向量g x 为地震地面运动加速度M, C和K分别为结构系统的nn×阶质量矩阵阻尼矩阵和刚度矩阵H为控制力作用位置矩阵1×n I为n行元素均为1的列向量要求M和H均为满秩且矩阵对),(11HMCM−−−可控即nHMsICM n n=−−−×−][rank11C∈∀s(2)系统(1)的等价状态方程为)()()()(tx EtButAZtZg−+=(3)2006年6月 系 统 仿 真 学 报 Jun., 2006式中−−=−−C M K M I A n 110,=−H M B 10, =n I E 0,=X X Z 选取状态反馈控制律)()()(10t FZ t XF t X F u =+=][10F F F = (4)式中F 为n r 2×的反馈增益矩阵反馈控制作用是状态变量(速度和位移)的线性组合此时闭环系统为)()()(t xE t Z A t Z g c −=BF A A c += (5)2 特征结构配置控制算法因非亏损矩阵较亏损矩阵对系统参数扰动具有良好的鲁棒性故本文仅考虑闭环系统矩阵c A 的特征值为互异且自共轭情形记特征值为C ∈is n i 2,,2,1"=其对应的特征向量分别为iv ni 2,,2,1"=则有i c i i v A v s =, n i 2,,2,1"= (6)记),,,(diag 221n s s s "=Λ,][221n v v v V "= (7)则方程(6)等价于Λ=V V A c 或Λ=+V BFV AV (8)因矩阵对),(11H M C M −−−可控故对矩阵][11H M sI C M −−−−进行初等变换可得n n ×阶单模阵)(s P 和)()(r n r n +×+阶单模阵)(s Q 满足下式]0[)(][)(11I s Q H M sIC M s P =−−−−C ∈∀s (9)对)(s Q进行如下分块=)()()()()(22211211s Q s Q s Q s Q s Q (10) 其中)(11s Q 为r n ×阶矩阵从而有下述定理它给出了方程(8)中增益阵F 的参数化表达式其证明过程详见文献[5-6]关于更多的特征结构配置参数化方法及其应用研究可参见文献[7-13]定理1 给定二阶动力学系统(1)那么1) 若矩阵对),(11H M C M −−−可控则矩阵对),(B A 仍可控的充要条件是存在n n ×阶单模阵)(s H 和)()(r n r n +×+阶单模阵=)()()()()(22211211s L s L s L s L s L (11) 其中)(11s L 为r n ×阶矩阵满足下式]0[)()]()()([)(11112n I s L s Q sI K M s P s Q s H =−+−− (12)2) 若上述条件成立那么满足(8)的状态反馈增益阵F 可如下给出1−=WV F (13)式中1112211()[],()i n i ii i L s V v v v v g s L s ==" (14)][221n w w w W "=i i i i i i i g s KL M s P s Q s L s Q w )]()()()()([111222121−+= (15)其中g i , n i 2,,2,1"=是一组1×r 阶参量需满足0)()()()(det 221121111122111111≠n n n n n g s L s g s L s g s L g s L "! (16)j i s s =⇔ ji g g=n j i 2,,2,1,"= (17)综合上述特征结构配置参数化结果其优越性可以归纳为如下几点1) 该方法给出了满足方程(8)的所有状态反馈增益阵和闭环特征向量矩阵的参数化表示其含有的参量可进一步用来满足系统设计中其它性能指标如鲁棒性等2) 该方法计算过程中只涉及层间剪切型结构模型(1)中矩阵MC K 和H 并不涉及增广系统(3)中矩阵A 和B故便于工程应用3 最优结构主动控制设计本文考虑的具有最优控制力的结构主动控制设计问题可如下描述: 给定层间剪切建筑结构系统(1)以及一组自共轭且互异的复数C ∈is n i 2,,2,1"=确定形如(4)的状态反馈控制律)(t FZ u=对于任意正定对称矩阵R满足下述条件:1) 闭环系统矩阵c A 的特征值为C ∈is n i 2,,2,1"=2) ))((min F P tr ;其中正定矩阵P 是下述Lyapunov方程的解RF F PA P A Tc T c −=+. (18)不难发现上述优化问题等价于极小化下述二次型性能指标函数dt t Ru t u I T )()(0∫∞=(19)为求解问题ESA 我们首先给出如下结论给定系统(1)以及一组共轭互异的复数i s ,n i 2,,2,1"=, 若矩阵对),(11H M C M −−−和),(B A 均可控那么对于任一正定对称矩阵r r R ×∈R , 方程(18)中矩阵P 的解为122)()(21−×−+−=V s s g s RM s M g V P nn j i j j i T T i T (20) 式中)()()()()()(111222121i i i i i i s KL M s P s Q s L s Q s M −+= (21)矩阵V 由(14)决定r i g C ∈, n i 2,,2,1"=,为一组满足(16)和(17)的自由参量若记)(i g V V =由(20)易知))2,,2,1,((tr ))(tr(n i g P F P i "== (22)式中)2,,2,1,(n i g P i "=由(20)给出从而问题ESA 转化为))2,,2,1,,((tr min n i s g P i i "=,s. t . (16)和(17) (23)2006年6月 王国胜, 等基于特征结构配置的结构主动控制及仿真 Jun., 2006综上分析问题ESA的求解过程可归纳为如下步骤我们称之为特征结构配置方法(以下简称算法ESA)1) 算满足(9)的单模阵)(s P 和)(s Q 如(10)对)(s Q 进行分块2) 计算满足(12)式的单模阵)(s H 和)(sL 如(11)对)(s L 进行分块3) 设定ig n i 2,,2,1"=的参量表示根据(14)和(15)分别计算矩阵V 和W的参量表达式4) 求解优化问题(23)确定满足(16)和(17)的一组参量ig n i 2,,2,1"=将其代回上步计算矩阵V 和W5) 根据(13)计算状态反馈增益阵F4 数值仿真分析考虑如图1所示三层剪切型结构模型[2-3]该模型的结构参数取自三层Benchmark 模型但与标准Benchmark 不同的是采用在底层和中间层设置两个主动拉索控制装置结构系统矩阵为)kg (981981981=M−=001011H s/m)(N 3.43763.26.6163.27.4563.576.613.577.382⋅−−−−=C62.741 1.6410.3691.641 3.021 1.62410(N/m)0.369 1.624 1.333K −=−−× − ,假设待配置的特征值为i s 1432,1±−=is 4364,3±−=is 7296,5±−=根据算法ESA有如下结果1) 由奇异值分解易算得满足(9)的单模阵)(i s P 和)(i sQ 6,,2,1"=i 并如(10)对)(i s Q 进行分块;2) 由奇异值分解易求得满足(12)的单模阵)(i s H 和)(i sL 6,,2,1"=i 并如(11)对)(i s L 进行分块;3) 设定=i i i b ag 6,,2,1"=i 由(14)和(15)算得+−+−−−+−−−−++++++−++=−11111111111141)4539.00352.0()0658.03754.0()3566.00186.0()3050.00180.0()0661.014960.0()1538.00481.0()0315.00042.0()0266.00010.0()0246.00036.0()0210.00032.0()0023.00112.0()0098.00055.0(10b i a i b i a i b i a i b i a i b i a i b i a i v 21v v =+−++++−−++−−−+−−++−+−+=−33333333333343)1471.02036.0()0149.03493.0()0843.00867.0()1189.02153.0()0789.03285.0()0400.05438.0()0051.00027.0()0008.00080.0()0022.00016.0()0053.00020.0()0072.00028.0()0125.00008.0(10b i a i b i a i b i a i b i a i b i a i b i a i v43v v =−+−−+−−+++−+−++++−+−−−=−55555555555545)0741.02663.0()0496.01058.0()5560.00227.0()0645.02279.0()0799.04484.0()1424.02206.0()0035.00014.0()0009.00014.0()0076.00006.0()0030.00013.0()0063.00003.0()0033.00016.0(10b i a i b i a i b i a i b i a i b i a i b i a i v65v v =×−+−−−×−=−−−−1919191101)107765.21()2324.31087.3(10)1088.32297.3(10)108036.91(b i a i b i a i w 21w w =×++−−−×+=−−−−393113113103)102100.11()529.523967.8(10)4043.8529.52(10)109636.11(b i a i b i a i w 43w w =×+++−+×+=−−−−595115115105)102100.11()529.523967.8(10)529.524043.8(10)109636.11(b i a i b i a i w 65w w =4) 由matlab 优化工具箱中函数fmincon 算得优化问题(23)的优化参数为++==i i g g 9283.99984.91414.88380.721,−−+==i i g g 6354.44319.29593.61988.343,+−−==i i g g 0498.45629.71648.28124.365 将其代入第三步易得矩阵V 和W5) 根据(13)算得状态反馈增益阵为50.86260.95530.54900.13530.04420.0198100.4901 1.43260.77330.08910.11590.0786F −−−−− =−−−为进一步验证算法有效性选取输入地震波为El Centro (S00E)波图23和4给出了无控和F 控制结构系统的各层位移速度和加速度反应曲线图5给出了相应的控制力时程曲线仿真结果表明El Centro 地震输入下本文所提算法对结构的位移速度和加速度响应均能起到良好的控制作用同样的El Centro(S00E)地震波输入下图2表明采用本文设计控制律的结构位移要远小于无控下的结构位移图3表明采用本文设计控制律的结构速度要远小于无控下的结构速度图4表明采用本文设计控制律的结构加速度要远小2006年6月 系 统 仿 真 学 报 Jun., 2006图2 Elcentro 波作用下无控和F 控制的结构位移比较 图3 Elcentro 波作用下无控和F 控制的各层速度比较图4 Elcentro 波作用下无控和F 控制的各层加速度比较 图5 Elcentro 波作用下F 控制的各层控制力时程于无控下的结构加速度图5表明得到上述很好的控制效果却所采用了较小控制力5 结论将现代控制理论中的特征结构配置方法引入土木结构中考虑了结构系统的最优控制问题基于特征结构配置参数化方法提供的自由度将该问题转化为含有约束条件的优化问题并给出了一种简单有效的算法最后把利用该算法设计的控制器应用于地震作用下的三层剪切结构建筑模型并进行了仿真分析仿真结果表明El centro 地震输入下本文所提算法对结构的位移速度和加速度响应均能起到良好的控制作用同时也表明该特征结构配置方法在实际应用中的简单且有效性其在土木工程中的进一步应用将是今后研究工作的重点参考文献[1] Yao J T P. Concept of structure control [J]. ASCE Journal of StructureDivision (S0733-9453). 1972, 98(ST7): 1567-1574. [2] 欧进萍. 结构振动控制:主动半主动和智能控制 [D]. 北京: 科学出版社, 2003.[3] 张春巍, 欧进萍. 结构振动控制Benchmark 研究发展综述 [C]//现代土木工程理论与实践, 南京: 河海大学出版社, 2003: 489-496. [4] Mohamed A R, Horst H L. Structural Control by Pole AssignmentMethod [J]. Journal of the Engineering Mechanics Division (S0044- 7951). 1978, 104(5): 1159-1175.[5] Duan G R, Liu G P . Complete parametric approach for eigenstructureassignment in a class of second-order linear systems [J]. Automatica (S0005-1098). 2002, 38(4): 725-729.[6] Duan G R, Wang G S, Liu G P. Eigenstructure assignment in a class ofsecond-order linear systems: a complete parametric approach [C]// Proceedings of CACSCUK, Manchester, UK, 2002, 89-96.[7] Wang G S, Duan G R. Robust pole assignment via P-D feedback in aclass of second-order dynamic systems [C]//International Conference of Automation, Robots and Computer Vision, Kunming, China, 2004, 1152-1156. [8] Wang G S, Liang B, Duan G R Reconfiguring second-order dynamicsystems via state feedback eigenstructure assignment [J]. International Journal of Control, Automation, and Systems (S1598-6446). 2005, 3(1): 109-116.[9] 王国胜, 柴庆宣, 段广仁. 二阶动力学系统分散状态反馈特征结构配置 [J]. 哈尔滨工业大学学报, 2004, 36(12): 1585-1588. [10] 王国胜, 段广仁. 二阶动力学系统输出反馈特征结构配置 [J]. 系统工程与电子技术, 2004, 26(8): 1080-1083.[11] 王国胜, 王子华, 段广仁. 二阶动力学系统的干扰解耦与抑制 [J].系统工程与电子技术, 2004, 26(11): 1640-1643.[12] 段广仁, 王国胜. 矩阵方程EVJ 2+A VJ+CV=BW 的两种解析通解[J]. 哈尔滨工业大学学报, 2005, 37(1): 1-4.[13] Duan G R. Parametric eigenstructure assignment in second-orderdescriptor linear systems [J]. IEEE Transactions on Automatic Control (S0018-9286). 2004, 49(10): 1789-1795.。
模糊控制系统的MATLAB仿真与应用
另外 " 对于 & 还可以 9 H 3 @ =型 的 模 糊 推 理 系 统 " 利 用 DM$ # P$ % & D4 C N 6 5 J 3M3 6 K= 8 O 9 Q Q R% @ 2 3 8 3 @ ? 3 编 辑 器 进 行 自 适 应 神 经 模 糊 推 理 系 统 的 " & R > 成高亮红色 " 并且相应的规则显示 在图形窗口的底部 ) 注意到若有一个小图形是空的 " 则对应于这个规则中该变量的特征值为 @ )第三 = @ 3 列的最后一个小图形表示给定推理系统的加权合计 判定 ) 此判定依赖于系统的输入值 )
图- $ % &编辑窗口
曲面观察器 在命令窗口输入. # ! ’ > 9 8 2 J 5 3 K/ 命令 " 或在各个编辑器窗口选择相应的菜单 " 即可打 开模糊推理的输入输出曲面视图窗口 ) 该窗口用于 显示输入输出量 对 应 的 表 面 空 间 " 并可改变各轴对 应的变量及观察 视 角 " 便于用户对设计的模糊推理 系统进行修改和优化 )
模糊控制系统设计的关键是模糊控制器的设
万方数据 邢春贵 ’ 男& 吉林长春人 & 硕士研究生 & 主要领域 . 模式识别与智能控制 0 ( : 9 ; 8& 收稿日期 . + * * , 8* 8 8( )
,期
邢春贵等 0 模糊控制系统的 TDW U DX仿真与应用
Z7 ! Z
具 箱 中有 !个带 有 图 形 界 面 的 基 本 工 具 " 它们分别 是 模 糊推理系统 # 编 辑 器( 隶 属 度 函 数 编 辑 器( ’ $ % & 模糊规则编辑器 ( 模糊规则观察器和曲面观察器 ) 这 些* 工具之间是动态链接的 使用它们中的任意 " +% 一个对 $ 的 修 改 将 影 响 到 任 何其它已打开的 % & 中的显示结果 ) * +% 模糊推理 系 统 编 辑 器 该 编 辑 器 用 于 设 计 # , ’ 和显示模糊推理系统的一些基本信息与参数 ) 如图 在窗口的上半部以图形框的形式列出了模 -所 示 " 糊推理系统的基本组成部分 " 即输入模糊量 ( 模糊规 则和输出模糊变量 ) 通过鼠标双击上述图形 " 能够激 活隶属函数编辑器和模糊规则编辑器等相应的编辑 窗口 ) 在窗口的下半部分的左侧列出了模糊推理系 统 的 名 称( 类 型 和 一 些 基 本 属 性" 包括. 与/ 运算方 法( 或/ 运算方 法 ( 蕴 涵 运 算( 模糊规则的综合运算 . 以 及 去模糊化的 方 法 等 " 用户只需用鼠标即可设定 相应的属性 ) 在图 -中 " 模糊推理系统的基本属性设 定为 0 与/ 运算采用极小运算 " 或/ 运算采用极大运 . . 算" 模糊蕴涵采用极小运算 " 模糊规则综合采用极大 运算 " 去模糊化采用重心法 ) 窗口下半部分的右侧 " 列出了当前选定的模糊语言变量的名称及其论域范 围)
基于粗神经网络和主观贝叶斯的雷达型号识别
基于粗神经网络和主观贝叶斯的雷达型号识别韩林呈【摘要】为提高雷达识别系统的识别率,提出了一种基于粗集理论、径向基神经网络及主观贝叶斯方法的三层识别模型.经过样本数据粗集方法简化、神经网络分类以及对识别结果的贝叶斯融合等步骤,将粗集的规则提取能力、神经网络的分类能力和主观贝叶斯方法的推理融合能力结合起来.仿真结果表明,该模型提高了系统的识别率和运算速度.【期刊名称】《微型电脑应用》【年(卷),期】2016(032)006【总页数】4页(P77-80)【关键词】雷达;粗集;径向基神经网络;主观贝叶斯方法【作者】韩林呈【作者单位】机械化步兵学院教研部作战训练实验中心石家庄,050083【正文语种】中文【中图分类】TP183雷达型号识别是电子对抗系统的主要任务之一。
通常采用将雷达侦察设备获得的信号特征参数与数据库中各型雷达数据进行对比的方法进行识别。
由于识别结果受到多方面因素干扰,因此,如何提高识别系统的可信度和识别效率,是电子对抗领域亟需解决的一个问题。
粗集理论(Rough Sets Theory,RST)[1]是一种描述不完整性和不确定性的数学工具,涵盖了归纳推理、演绎推理和常识推理3种形式,可以对数据进行分析,从中发现隐含的知识,揭示潜在规律。
神经网络是不确定性领域的另一个重要工具,具有并行处理,高度容错和泛化能力强等特点,适用于模式识别、复杂对象建模和控制等场合。
其中,径向基(Radial Basis Function,RBF)神经网络[2][3]是一种适用于模式识别的神经网络模型。
该模型能够将低维线性不可分数据映射到高维空间内,使数据在高维空间内线性可分,从而逼近任意的非线性函数,达到很好的分类效果。
主观贝叶斯方法[4]又称主观概率论,是一种处理不确定性推理的模型,它基于概率论中的贝叶斯公式提出,并首次应用于地矿侦测专家系统Prospector[5]。
粗集、神经网络和主观贝叶斯方法均为处理不确定性问题的有利工具,将三者结合研究具有合理性。
【系统仿真学报】_模式识别_期刊发文热词逐年推荐_20140723
46 47 48 49 50 51
人脸识别 交互式图像分割 二维几何特征 三维表面绘制 mpeg-4 mel滤波器组
1 1 1 1 1 1
46 47 48 49 50 51 52 53 54 55
2009年 科研热词 模式识别 聚类 神经网络 支持向量机 鲁棒性 高斯混合模型 高斯混合建模 非线性子空间 非协作通信 链式智能体 遥感影像 遗传算法 辐射源 载频估计 轮询式 质量诊断 谱聚类 谱图理论 说话人辨认 说话人识别 脑中风 类内特征连续性准则 离散动态贝叶斯网络 矩不变量 目标识别 特征选择 模拟电路 模式分类 核密度估计 核函数 核主元分析 机器学习 曲面轮廓矩不变量 故障诊断 故障识别 故障检测 改进的最近邻算法 感知线性预测 小批量 多类分类 多分类支持向量机 多准则 均值移位 图分割 图像分割 推荐指数 3 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
科研热词 骨架提取 飞机目标识别 聚类 细分 线性判别分析 植物重建 最大散度差判别分析 小样本问题
推荐指数 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4
科研热词 表面肌电信号 虚拟环境 模式识别 入机交互
卷积神经网络 决策树 免疫识别 免疫算法 仿生模式识别 人脸检测 人工免疫系统 不确定推理 三维目标识别 gabor小波变换
ቤተ መጻሕፍቲ ባይዱ
1 1 1 1 1 1 1 1 1 1
推荐指数 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8
科研热词 触摸点归属 粒子群优化 文化算法 多用户协同 多点触摸 协同手势 iris bp网络
基于信号注入仿真的红外成像导引算法评估系统
系 统 仿 真 学 报Vol.16 No.2 Feb. 2004·337·JOURNAL OF SYSTEM SIMULATION基于信号注入仿真的红外成像导引算法评估系统王学伟,沈同圣,周晓东(海军航空工程学院自动控制系, 山东烟台 264001)摘 要:在红外成像导引算法性能评估中,信号注入式仿真不用将真实导引头引入闭合回路。
计算 机成像系统模拟战场环境,产生包含目标、背景和干扰的红外图像源,通过视频输出接口注入到图 像处理器,图像处理器按照成像导引头的工作方式,对目标进行捕获跟踪。
以反舰导弹为仿真对象, 介绍了系统的构成,阐述了以提取天水线为准则的图像分割算法和模糊综合评判目标识别算法,分 析了形心和相关两种跟踪算法的适用场合和工作过程,最后给出了评估准则。
关键词:信号注入仿真;性能评估;CIG ;DSP ;图像采集;图像处理 文章编号:1004-731X (2004) 02-0337-03 中图分类号:TP391.9 文献标识码:AAn Evaluation System of Infrared Imaging Guiding Algorithm Based on theSignal Injection SimulationWANG Xue-wei , SHEN Tong-sheng , ZHOU Xiao-dong(Naval Aeronautica l Engineering Academy, Depar tme nt of Automatic Control Engineering, Sha ndong 264001, China)Abstract: In the evaluation of the infrared imaging guiding algorithm, the signal injection simulation doesn ’t take the actual guider into the loop. The computer image generation system (CIG) simulates the battlefield. Series of infrared images which include the target, background and interference are generated by the CIG, then are injected into the image processing unit (DSP) with the video out interface. The DSP acts as the guider to simulate the guider to detect and track the target. The consistence of the system was introduced. The sea-sky line was picked up to divide the image. The fuzzy synthetic judging method had been used to recognize the target. Two tracking algorithm, relative and centroid, had been compared with each other. In the end, the evaluating principle was introduced.Keywords: signal injection simulation; performance evaluation; CIG; DSP; image collection; image processing整三维场景中导引头(观察者)的坐标,从而将导引头所“看”到的红外图像输出到 DSP ,这个模拟导弹跟踪目标的过程可 以通过 CIG 显示器和监视器显示出来。
基于SVM和遗传算法的装甲车齿轮箱故障模式识别
基于SVM和遗传算法的装甲车齿轮箱故障模式识别周昕晨;林董;汪栋洋【摘要】装甲车齿轮箱故障会严重影响装甲车的稳定运行,对故障进行模式识别是实现智能诊断的关键.基于支持向量机的齿轮箱故障诊断模型中参数C和σ 对齿轮箱模型分类识别性能有很大的影响,利用遗传算法对这2个重要参数进行优化可明显提高模型的分类识别性能.试验信号和实测信号应用结果表明,采用该参数优化模型提高了支持向量机的分类的正确率.该方法的应用为实现齿轮箱轴承故障的模式识别和智能诊断提供了帮助.%Stable operation of armored vehicles gearbox fault will seriously affect the armored car,and accurate fault pattern recognition is the key to realize intelligent diagnosis.The parameter C andσ in the gearbox fault diagnosis model based on support vector machine has a great influence on the classification and recognition performance of the gearbox mod-el.The genetic algorithm is used to optimize the two important parameters in the pattern recognition of gearbox,which can obviously improve the classification and recognition performance of the model.The application of experimental signals and engineering signals show that the optimized model can improve the classification accuracy of SVM.The application of this method can help to realize the pattern recognition and intelligent diagnosis of gearbox bearing fault.【期刊名称】《新技术新工艺》【年(卷),期】2018(000)001【总页数】5页(P51-55)【关键词】齿轮箱;支持向量机;遗传算法;模式识别【作者】周昕晨;林董;汪栋洋【作者单位】中国人民解放军陆军步兵学院(石家庄校区),河北石家庄 050000;中国人民解放军陆军步兵学院(石家庄校区),河北石家庄 050000;中国人民解放军陆军步兵学院(石家庄校区),河北石家庄 050000【正文语种】中文【中图分类】TH133随着人工智能技术的发展,专家系统虽被广泛地应用到故障诊断领域中,但是仍存在知识获取困难等问题。