山东大学网络教育期末考试试题及答案-自动控制原理A
山东大学网络教育自动控制原理-专期末考试试题及参考答案
要求:保持稳态误差不变,且校正后系统的相角裕度
1)画出原系统的Bode图
2)确定串联超前校正装置的传递函数;(要有必要的步骤,不用校验)
解:1)c= 20= 26.6
2) Gc(s) = 1+0.084s/ 1+0.03s
4、已知控制系统如图3所示,求:
(1)当K= 0时,确定系统的阻尼系数不无阻尼振荡频率a,和单位斜坡输入信号作用时系统的稳态误差eu。
自动控制原理
一、计算题(135分)
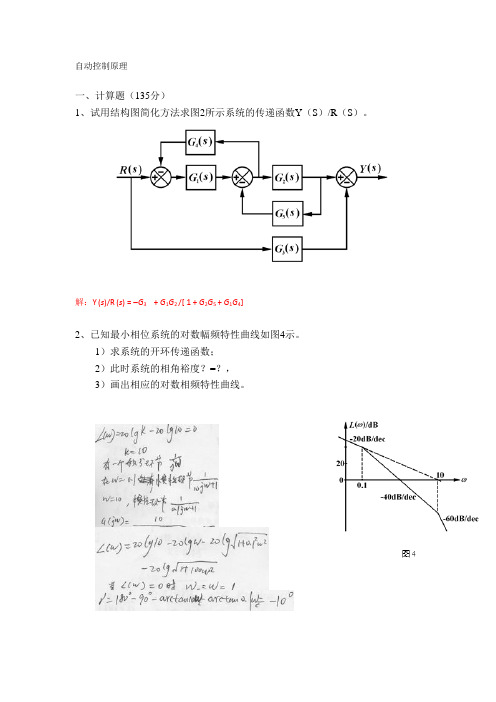
1、试用结构图简化方法求图2所示系统的传递函数Y(S)/R(S)。
解:Y(s)/R(s) =G3+G1G2/[ 1 +G2G5+G1G4]
2、已知最小相位系统的对数幅频特性曲线如图4示。
1)求系统的开环传递函数;
2)此时系统的相角裕度?=?,
3)画出相应的对数相频特性曲线。
(2)当z= 0.707时,试确定系统中的K值和单位斜坡输入时系统的稳态误差。
5、已知负反馈系统的开环传递函数为
要求:保持稳态误差不变,且校正后系统 26.6
2) Gc(s) = 1+1.24s/ 1+6.1s
7、解:
8解:
自动控制原理期末考试试卷(含答案)讲解学习

2017年自动控制原理期末考试卷与答案一、填空题(每空 1 分,共20分)1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。
6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。
10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为1050.20.5s s s s+++。
11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。
期末考试试题集-自动控制原理(含完整答案)

期末考试-复习重点自动控制原理1一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( ) A.1 B.2 C.5 D.10 7. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
自动控制原理期末考试卷与答案

自动控制原理期末考试卷与答案、填空题(每空 1 分,共20分)、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。
、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时方向包围 (-1, j0 )整圈数。
、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。
%σ是超调量 。
、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为()A ω=,相频特性为01112)90()()tg T tg T ωωω--=---。
反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。
、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为1050.20.5s s s s+++。
、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
、根轨迹起始于开环极点,终止于开环零点。
、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
判断一个闭环线性控制系统是否稳定,在时域分析中采用劳判据;在频域分析中采用奈奎斯特判据。
自动控制原理期末试题及答案A

考场
学院
学年第二学期期末考试
级三年制高职《自动控制原理》试题
院系
题号
一
二
三
四
五
总分人
班级
姓名
座号
考生须知: 1.姓名必须 写在装订线 左侧,写在 其它位置试 卷一律作废 。请先检查 试卷是否缺 页,如缺页 请向监考教 师声明。如 不检查不声 明,后果由 考生本人负 责。 2.考试结束后, 考生不得将试 卷、答题纸和 草稿纸带出考 场。
L() / dB 0dB / dec
20
20dB / dec
0dB
0.5
/ rad s1
ห้องสมุดไป่ตู้
线
2、从图(a),求系统输入为
xi
,输出为
xo
时的传递函数
X o (s) X i (s)
。
xi
R1 R2
xo
C
图(a)中, xi , xo 是电压量。
第 4 页,共 4 页
答案、自动控制原理 A 答案
一、闭环、负反馈 、偏差 、拉式变换、 K
)
与系统的输入信号有关;( ),以及与系统的放大倍数有关。(
)
4.前向通道传递函数为 k ( k 0) 的单位负反馈系统能无差的跟踪斜波信号(
)。
s2
5.最小相位系统是稳定的控制系统( )。
6. 对控制系统的基本要求是快、稳、准。( )
7. 对开环极点为零的系统,要使系统稳定,开环 Nyquist 轨迹应逆时针绕(-1,j0)点旋转
、自激振荡(自持振荡、
1 T 2 2
自振) 系统中有一处或几处的信号是以脉冲或数码的形式传递的系统(含有采
样开关的系统)
《自动控制原理》A卷答案(电气工程及自动化专业)

山东科技大学2007—2008学年第一学期《自动控制原理》考试试卷(A 卷)答案及评分标准班级 姓名 学号一、填空题(每空1分,共15分)1、对自动控制系统的基本性能要求可归纳为三个方面,这三个方面是 稳 、快 、 准 。
2、对于最小相位系统,开环对数幅频特性的低频区决定了系统的准确性能;中频区决定了系统的 快速性能。
高频区决定了系统 抗干扰 性能。
若要求提高系统的响应速度应选择 超前 校正装置。
若要求提高系统抑制噪声的能力应选择 滞后 校正装置。
3、某反馈控制的特征函数)5s 1)(2s .01()5s .01)(1s .01()s (H )s (G 1)s (F ++++=+=则该系统的开环极点 -5,-0.2 ,为闭环极点为 -10,-2 。
4、如下图所示系统的开环放大倍数为 100 ,当输入信号4=)t (r 时,系统稳态误差为4/101 ,当输入信号4=)t (r t 时,系统稳态误差为 ∞。
5、系统传递函数2345)(2+++=s s s s G ,其可控标准型为[]x y u x x54,103210--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=。
可观测标准型动态方程为[]x y u x x 10,543120=⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡--= 。
二、选择题(每题3分,共15分)1、若系统(或元件)的某输入 输出的拉氏变换分别为)(),(0s x s x i ,对应的传递函数记为G(s),则下列说法是不正确的有(B ) A 在零初始条件下,)()(0s X s X i =G(s);B )()(G(s)0s X s X i =,描述了系统的全部信息;C 若g(t)为单位脉冲响应,则L[g(t)]G(s)=;D G(s)反映了系统本身的固有特性。
2、已知系统的状态方程和输出方程为[]x y u x x532,121132=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---= ,则系统状态( A )。
山大继续教育自动控制原理期末考试答案

词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
自动控制系统:将被控对象和控制装置(控制器)按照一定的方式连接起来构成的有机总体。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
(完整版),自动控制原理期末试卷与答案,推荐文档

一、
单项选择题(每小题 1 分,共 20 分)
1. 系统和输入已知,求输出并对动态特性进行研究,称为( c )
A.系统综合
B.系统辨识 C.系统分析
D.系统设计
2. 惯性环节和积分环节的频率特性在( d)上相等。
A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率
3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( d )
A.比较元件
B.给定元件 C.反馈元件
D.放大元件
4. ω 从 0 变化到+∞时,延迟环节频率特性极坐标图为(a )
A.圆
B.半圆
C.椭圆
D.双曲线
5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电
动机可看作一个( d )
A.比例环节
B.微分环节
C.积分环节
D.惯性环节
C. ess
lim E(s)
s
D. ess
lim sE(s) s
17.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
A.减小增益
B.超前校正
C.滞后校正
D.滞后-超前
18.相位超前校正装置的奈氏曲线为( )
A.圆
B.上半圆
C.下半圆
D.45°弧线
K
19.开环传递函数为 G(s)H(s)=
B.稳定裕量越大
C.相位变化越小
D.稳态误差越小
11.设系统的特征方程为 Ds s 4 8s 3 17s 2 16s 5 0 ,则此系统 ( )
A.稳定
B.临界稳定
C.不稳定
D.稳定性不确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、名词解释
(1).稳定性
(2).频率响应
(3).传递函数
四、计算题
(1).求图1中电网络的传递函数,i u 为输入,0u 为输出。
图1
(1).解:电网络中输出部分的阻抗为:
2
1
)('Z R Cs s += 总阻抗为:
Cs Cs R Cs R s R s 1
1)('Z )(Z 111+=+
=+=
传递函数为:
11
1/1)(Z )('Z )(G 11+=+==
Cs R Cs Cs R Cs s s s
(2).设某单位负反馈系统的开环传递函数为1
10
)(+=
s s G k ,当输入信号)30sin()(0+=t t r 作用于闭环系统的输入端时,试求系统的稳态输出。
(2).解:
系统的闭环传递函数为:
1110
)1101/(110)(+=
+++=s s s s G
所以频率特性为:
1
1/2
21110
1110)(ωωωωjarctg e j j G -+=+=
系统的稳态输出为:
)8.24(122
10)11/103(12210
)
11/03(21110)(o 002
+=-+=
-++=t Sin arctg t Sin arctg t Sin t y ωω
学年 学期
山东大学 自动控制原理 课程试卷 A 卷
(3).求图2的传递函数()
()()
C s G s R s =。
图2 (3)解:
闭合回路有两个:
122212 ;1H G L H G G L -=-= (2分)
前向通路有两个,前向通路的余子式都为1。
32212 ;1G G P G G P -==
所以传递函数为:2
21123
2211)(H G G H G G G G G s G +++=
(4).控制系统的开环传递函数为)
12)(1(1
)(k ++=s s s G ,求该系统的开环幅频特
性和开环相频特性。
(4)解: 频率特性为:
)12)(1(1
)(k ++=
ωωωj j j G 开环幅频特性为:
1541
)(24++=
ωωωA
开环相频特性为:
2213)(ωω
ωϕ--=arctg
学年 学期
山东大学 自动控制原理(非自动化类) 课程试卷 A 卷。