An Adaptive IMM Estimator for Aircraft Tracking Emil Semerdjiev 1 Ludmila Mihaylova 1
六年级太空旅行英语阅读理解25题

六年级太空旅行英语阅读理解25题1<背景文章>Space is a fascinating place full of mysteries and wonders. There are countless stars shining brightly in the vast expanse. The universe is so huge that it's hard to imagine its size. Planets of different colors and sizes orbit around the stars. Some planets are large and gaseous, while others are small and rocky.The beauty of space is truly amazing. The sight of a colorful nebula is like a painting. Nebulas are clouds of gas and dust where new stars are born. The blackness of space is interrupted by the bright lights of distant galaxies.Space exploration is an exciting adventure. Scientists are constantly looking for new planets and studying the mysteries of the universe. Who knows what other wonders are waiting to be discovered?1. The universe is very ____.A. smallB. bigC. beautifulD. boring答案:B。
基于模糊免疫策略的机场航班延误自适应实时预测方法
关键 词 : 班延 误 ; 糊 免疫 策略 ; 航 模 自适 应 调 整 ;- 集 ; 时 预 测 X截 实
Ab t a t To m a e n a c a e n e ltme pr d c i o lght de a sr c : k a c ur t a d r a — i e i ton f r fi l ys,r f r i g t t e h g o e e rn o h t ou ht f
2 .Tini y L b frAd a c d Sg a r c s ig,Cii Ava in Unv r i fC ia,Tini a i Ke a o v n e in lP o e sn n vl it iest o h n o y ai n,3 0 0 0 3 0,Chn ; ia 3 Co lg fI f r ainS in ea dTe h oo y Na j g Unv riyo r n u is& Asrn u is . l eo no m t ce c n c n lg , n i iest fAe o a t e o n c to a tc , Na j g,2 0 1 ,C n ) ni n 1 0 6 hia
fzy u z me b r h p r d , a u z m mu e r d c i n m e s i g a e f z y i n p e it me h d s r p s d Th o c p s f "e f , o t o i p o o e . e c n e t o s l
机务英语试题及答案
机务英语试题及答案一、选择题(每题2分,共20分)1. What is the standard term for a person who maintains aircraft?A. PilotB. MechanicC. Air Traffic ControllerD. Ground Staff答案:B2. Which of the following is not a type of aircraft engine?A. TurbopropB. TurbofanC. TurbojetD. Steam Engine答案:D3. What does the acronym "FAA" stand for?A. Federal Aviation AdministrationB. Free Airline AssociationC. Flight Assistance AgencyD. Fixed Airplane Association答案:A4. What is the term used to describe the process of checking an aircraft's systems before flight?A. Pre-flight InspectionB. Post-flight InspectionC. Aircraft MaintenanceD. Engine Overhaul答案:A5. Which of the following is not a component of an aircraft's landing gear?A. TiresB. BrakesC. GearboxD. Propeller答案:D6. What is the term for the document that contains all the technical details of an aircraft?A. Aircraft ManualB. Pilot's HandbookC. Maintenance LogD. Flight Plan答案:A7. What does the acronym "ICAO" stand for?A. International Civil Aviation OrganizationB. International Commercial Aviation OrganizationC. International Cargo Airline OrganizationD. International Communications Aerospace Organization答案:A8. What is the term used to describe the process of removing an aircraft from service for maintenance?A. GroundingB. ParkingC. DecommissioningD. Maintenance Standby答案:A9. Which of the following is not a type of aircraft fuel?A. Jet A-1B. Avgas 100LLC. DieselD. Kerosene答案:C10. What is the term for the person responsible for overseeing the maintenance of an aircraft?A. Chief PilotB. Aircraft EngineerC. Ground Crew ChiefD. Air Traffic Controller答案:B二、填空题(每题2分,共20分)1. The primary function of an aircraft's ____________ is to provide lift.答案:wing2. The term ____________ refers to the ability of an aircraft to fly at a constant altitude without gaining or losing height.答案:cruise3. An aircraft's ____________ is the maximum speed at which it can fly without causing structural damage.答案:never-exceed speed4. The ____________ is the area on an airport where aircraft are parked, maintained, or loaded.答案:apron5. The ____________ is the document that records all the maintenance activities performed on an aircraft.答案:logbook6. The ____________ is the process of cleaning and inspecting an aircraft's exterior after it has landed.答案:wash7. The ____________ is the part of an aircraft that connects the wings to the fuselage.答案:wing root8. The ____________ is the system that controls the direction of an aircraft in flight.答案:rudder9. The ____________ is the process of checking the aircraft's systems and condition after it has landed.答案:post-flight inspection10. The ____________ is the document that contains all the necessary information for the safe operation of an aircraft.答案:aircraft operating manual三、简答题(每题10分,共60分)1. Explain the difference between a turboprop and a turbofan engine.答案:A turboprop engine uses a turbine to drive a propeller directly, while a turbofan engine uses a turbine to drive a fan which provides most of the thrust. Turboprops are more efficient at lower speeds and altitudes, whereas turbofans are more efficient at higher speeds and altitudes.2. What are the main components of an aircraft's electrical system?答案:The main components include the battery, generator, alternator, bus bars, circuit breakers, wiring, and various electrical equipment such as lights, instruments, and avionics.3. Describe the purpose of an aircraft's hydraulic system.答案:The hydraulic system is used to transmit power for various aircraft systems, such as the flight controls, landing gear, flaps, and brakes. It allows for precisecontrol and reduces the weight of the aircraft by using fluid pressure instead of mechanical linkages.4. What are the steps involved in a pre-flight inspection?答案:The steps include checking the aircraft's exterior for damage, inspecting the tires and brakes, verifying the fuel quantity, checking the fluid levels。
大展弦比飞翼刚弹耦合运动稳定性分析

大展弦比飞翼刚弹耦合运动稳定性分析王立波;唐矗;杨超【摘要】推导了平均体轴系下弹性飞机的刚弹耦合运动方程,然后基于小扰动假设将其线化,综合有理函数拟合得到的时域非定常气动力模型,建立了可用以弹性飞机刚弹耦合运动学稳定性分析的状态空间模型.对某大展弦比飞翼布局无人机的纵向刚弹耦合运动稳定性进行了建模与计算.结果显示随着飞行速度的增加,机翼对称一弯模态与短周期运动模态发生耦合,使得飞翼在较小的飞行速度下就出现自由体颤振现象,表明结构弹性会对飞翼纵向动力学稳定性造成显著的影响,在大展弦比飞翼设计过程中应当引起重视.研究了在刚弹耦合状态空间建模过程中,截取弹性模态阶次的多少对稳定性分析结果的影响.分析了结构刚度对飞翼刚弹耦合运动稳定性的影响.计算表明刚弹耦合失稳速度随机翼刚度的增加呈近似线性增加的趋势.在相同速度水平下,弹性飞翼的短周期频率和阻尼值均随着机翼刚度的增加而增加.%The motion equation of a flexible aircraft have been derived based on the mean axes, which consider the rigid?body degrees of freedom as well as the elastic degrees of freedom of aircraft. The unsteady aerodynamics in time domain is computed by rational function approximation. The linear state?space model of the aircraft is then es?tablished based on the small disturbance theory, which could be used for flight dynamic stability analysis of the flexible aircrafts. For instance, the longitudinal stability analysis of a flying wing with large?aspect?ratio wings has been modeled and analyzed. The root locus indicates that an unsteady phenomenon called the free?body?flutter ap?pears at a low speed, because the first structural bending mode will interact with the short?period mode, whichmeans the structural flexibility will have a great influence on the flight stability of the flying wing, and that should be considered during the aircraft design procedure. Moreover, the effects by the number of elastic modes that have been used to establish the state?space model and the stiffness of the wing structure on the flight stability have also been studied. The result indicates that the stability critical speed of the flying wing will increase with the stiffness linearly. The frequency and damping of the short?period mode of the flying wing will also increase with the stiffness, if the velocity is frozen.【期刊名称】《西北工业大学学报》【年(卷),期】2017(035)006【总页数】9页(P1096-1104)【关键词】气动弹性;弹性飞机;动力学稳定性;飞翼【作者】王立波;唐矗;杨超【作者单位】中航工业第一飞机设计研究院总体气动设计研究所,陕西西安710089;北京航空航天大学航空科学与工程学院,北京 100191;中航工业第一飞机设计研究院强度设计研究所,陕西西安 710089;北京航空航天大学航空科学与工程学院,北京 100191【正文语种】中文【中图分类】V212.12;V215.3飞翼布局是一种无明显机身和尾翼的特殊布局形式,其外形顺滑、全机浸润面积小,可有效地减小全机摩擦阻力和干扰阻力。
非战争军事行动装备保障资源需求预测模型
保障资源需求预测 的重要 内容。主要包括预 测各个 时期 、 各 种 情 况 下 的保 障 资 源 需 求 情 况 , 分析不 同单位 、 不 同性 质 任务 的保障资源需 求变化 , 预测装 备保障资源 的需求总 量及其变化趋势、 装备需求构成及其 变化趋 势等内容。 1 . 3非战争军事行 动装备保 障资源需求结构 非战争 军事行动 的多样性决定 了非战争军 事行动 装备保 障资 源 需求的广泛性 , 突发事件的类型、 发生级别 、 突 发 事 件 发 生 的地点 , 以及 不 同的阶段和环节对装备保障 资源的需求差
0 引 言
非战争军事行 动装备 保障资源需求预测 , 是指根据 非 战争 军事行 动装备保 障任 务、 样式 、 规模 、 持续 时间 、 参 与 行动 装备数量 、 使用强度 等 因素 , 对非 战争军 事行动装 备 保障 目标所 需装备 的类型和 数量要求进行预测。 对装备 及 其配套器材 的需要量做 出科学预 测 , 不仅能为非 战争军 事 行动装备 的供应保 障活动提供依据 , 同时也能为指挥机 关
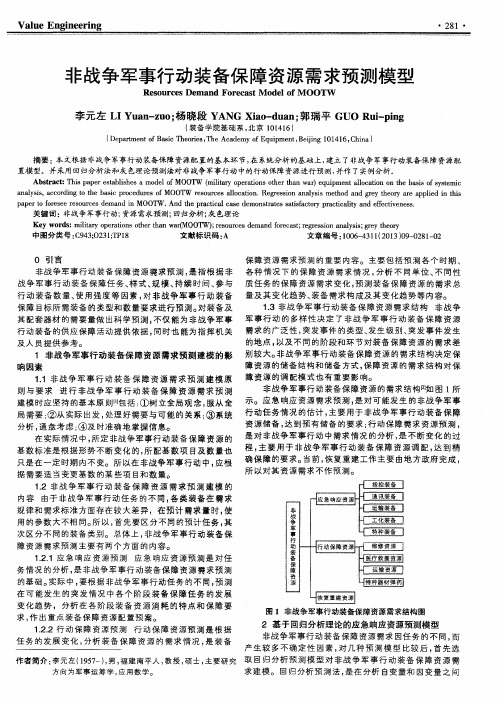
响 因素 是 对 可 能发 生 的 非 战 争 军 事 建模时应坚持 的基本原则『 1 ] 包括 : ① 树立全局观念 , 服从 全 示。 应 急 响应 资 源 需 求 预 测 ,
主要用于非战争军事行 动装备保障 局需要; ②从实际出发, 处理好需要与可能的关系; ③系统 行动任务 情况的估计 ,
摘要 : 本文根据非战争 军事行 动装备保 障资源配置 的基本 环节, 在 系统分析 的基础 上 , 建立 了非战争军事行 动装备保障 资源配 置模型 。并采用 回归分析法和灰 色理论预 测法对 非战争军事行 动中的行 动保 障资源进行预 测, 并作 了实例分析
基于改进马尔科夫模型的航空备件需求预测
够 指 出事 件 发 生 的 各 种 可 能状 态 ( 结果) ,而 且 还 必 须 给 出每 一种 状 态 出 现 的概 率 , 说 明被 预 测 的 事 件
0 引 言
在 航 空 器 的保 障 资 源 中 ,航 空 备件 对 飞 行 完 好 率 的 影 响 是 最 直 接 、 最 敏 感 的 , 因 此 对 航 空 备 件 的 需 求 预 测 方 法 的研 究 ,使 配 备 的 备 件 种 类 和 数 量 既 能 满 足 飞 行 需 要 ,又 能 减 少 备 件 费 用 ,具 有 重 要 的 军事和 经 济意义 【 l 】 。 在 航 空 备 件 的 实 际 配 置 过 程
关键 词 :航 空备 件 需求 ; 马 尔科 夫预 测 ;三 步平 均 法
中 图分类 号 :T J 0 3 文献 标 志码 :A
De ma nd Pr e d i c t i o n f o r Sp a r e Pa r t s of Avi a t i o n
夏 秀峰 ,董彦 军
( 沈 阳航 空航 天大 学 计算 机 学 院 ,沈 阳 1 1 0 1 3 6 )
摘 要 :针 对 时 间序 列 法存 在较 大误 差的 问题 ,构建 基 于 改进 马 尔科 夫 的航 空备 件 需求 预 测模 型 。利 用备件 的历 史数据 计 算 出状 态 转移 矩 阵 ,以 某飞 行 大 队航 材部 门某型 直 升机 备件 的月 统计 消耗 量 为例 ,通过 马 尔科 夫预 测和 改 进 的 三 步平 均 马 尔科 夫预 测 法对备 件 的需求 状 态概 率 进行 预 测分 析 。结 果表 明:在 给 定备 件 满足 率 的情 况 下 ,改进 的马 尔科 夫预 测 法 能取得 更好 的预 测效 果 。
T.W. ANDERSON (1971). The Statistical Analysis of Time Series. Series in Probability and Ma
425 BibliographyH.A KAIKE(1974).Markovian representation of stochastic processes and its application to the analysis of autoregressive moving average processes.Annals Institute Statistical Mathematics,vol.26,pp.363-387. B.D.O.A NDERSON and J.B.M OORE(1979).Optimal rmation and System Sciences Series, Prentice Hall,Englewood Cliffs,NJ.T.W.A NDERSON(1971).The Statistical Analysis of Time Series.Series in Probability and Mathematical Statistics,Wiley,New York.R.A NDRE-O BRECHT(1988).A new statistical approach for the automatic segmentation of continuous speech signals.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-36,no1,pp.29-40.R.A NDRE-O BRECHT(1990).Reconnaissance automatique de parole`a partir de segments acoustiques et de mod`e les de Markov cach´e s.Proc.Journ´e es Etude de la Parole,Montr´e al,May1990(in French).R.A NDRE-O BRECHT and H.Y.S U(1988).Three acoustic labellings for phoneme based continuous speech recognition.Proc.Speech’88,Edinburgh,UK,pp.943-950.U.A PPEL and A.VON B RANDT(1983).Adaptive sequential segmentation of piecewise stationary time rmation Sciences,vol.29,no1,pp.27-56.L.A.A ROIAN and H.L EVENE(1950).The effectiveness of quality control procedures.Jal American Statis-tical Association,vol.45,pp.520-529.K.J.A STR¨OM and B.W ITTENMARK(1984).Computer Controlled Systems:Theory and rma-tion and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.M.B AGSHAW and R.A.J OHNSON(1975a).The effect of serial correlation on the performance of CUSUM tests-Part II.Technometrics,vol.17,no1,pp.73-80.M.B AGSHAW and R.A.J OHNSON(1975b).The influence of reference values and estimated variance on the ARL of CUSUM tests.Jal Royal Statistical Society,vol.37(B),no3,pp.413-420.M.B AGSHAW and R.A.J OHNSON(1977).Sequential procedures for detecting parameter changes in a time-series model.Jal American Statistical Association,vol.72,no359,pp.593-597.R.K.B ANSAL and P.P APANTONI-K AZAKOS(1986).An algorithm for detecting a change in a stochastic process.IEEE rmation Theory,vol.IT-32,no2,pp.227-235.G.A.B ARNARD(1959).Control charts and stochastic processes.Jal Royal Statistical Society,vol.B.21, pp.239-271.A.E.B ASHARINOV andB.S.F LEISHMAN(1962).Methods of the statistical sequential analysis and their radiotechnical applications.Sovetskoe Radio,Moscow(in Russian).M.B ASSEVILLE(1978).D´e viations par rapport au maximum:formules d’arrˆe t et martingales associ´e es. Compte-rendus du S´e minaire de Probabilit´e s,Universit´e de Rennes I.M.B ASSEVILLE(1981).Edge detection using sequential methods for change in level-Part II:Sequential detection of change in mean.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-29,no1,pp.32-50.426B IBLIOGRAPHY M.B ASSEVILLE(1982).A survey of statistical failure detection techniques.In Contribution`a la D´e tectionS´e quentielle de Ruptures de Mod`e les Statistiques,Th`e se d’Etat,Universit´e de Rennes I,France(in English). M.B ASSEVILLE(1986).The two-models approach for the on-line detection of changes in AR processes. In Detection of Abrupt Changes in Signals and Dynamical Systems(M.Basseville,A.Benveniste,eds.). Lecture Notes in Control and Information Sciences,LNCIS77,Springer,New York,pp.169-215.M.B ASSEVILLE(1988).Detecting changes in signals and systems-A survey.Automatica,vol.24,pp.309-326.M.B ASSEVILLE(1989).Distance measures for signal processing and pattern recognition.Signal Process-ing,vol.18,pp.349-369.M.B ASSEVILLE and A.B ENVENISTE(1983a).Design and comparative study of some sequential jump detection algorithms for digital signals.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-31, no3,pp.521-535.M.B ASSEVILLE and A.B ENVENISTE(1983b).Sequential detection of abrupt changes in spectral charac-teristics of digital signals.IEEE rmation Theory,vol.IT-29,no5,pp.709-724.M.B ASSEVILLE and A.B ENVENISTE,eds.(1986).Detection of Abrupt Changes in Signals and Dynamical Systems.Lecture Notes in Control and Information Sciences,LNCIS77,Springer,New York.M.B ASSEVILLE and I.N IKIFOROV(1991).A unified framework for statistical change detection.Proc.30th IEEE Conference on Decision and Control,Brighton,UK.M.B ASSEVILLE,B.E SPIAU and J.G ASNIER(1981).Edge detection using sequential methods for change in level-Part I:A sequential edge detection algorithm.IEEE Trans.Acoustics,Speech,Signal Processing, vol.ASSP-29,no1,pp.24-31.M.B ASSEVILLE, A.B ENVENISTE and G.M OUSTAKIDES(1986).Detection and diagnosis of abrupt changes in modal characteristics of nonstationary digital signals.IEEE rmation Theory,vol.IT-32,no3,pp.412-417.M.B ASSEVILLE,A.B ENVENISTE,G.M OUSTAKIDES and A.R OUG´E E(1987a).Detection and diagnosis of changes in the eigenstructure of nonstationary multivariable systems.Automatica,vol.23,no3,pp.479-489. M.B ASSEVILLE,A.B ENVENISTE,G.M OUSTAKIDES and A.R OUG´E E(1987b).Optimal sensor location for detecting changes in dynamical behavior.IEEE Trans.Automatic Control,vol.AC-32,no12,pp.1067-1075.M.B ASSEVILLE,A.B ENVENISTE,B.G ACH-D EVAUCHELLE,M.G OURSAT,D.B ONNECASE,P.D OREY, M.P REVOSTO and M.O LAGNON(1993).Damage monitoring in vibration mechanics:issues in diagnos-tics and predictive maintenance.Mechanical Systems and Signal Processing,vol.7,no5,pp.401-423.R.V.B EARD(1971).Failure Accommodation in Linear Systems through Self-reorganization.Ph.D.Thesis, Dept.Aeronautics and Astronautics,MIT,Cambridge,MA.A.B ENVENISTE and J.J.F UCHS(1985).Single sample modal identification of a nonstationary stochastic process.IEEE Trans.Automatic Control,vol.AC-30,no1,pp.66-74.A.B ENVENISTE,M.B ASSEVILLE and G.M OUSTAKIDES(1987).The asymptotic local approach to change detection and model validation.IEEE Trans.Automatic Control,vol.AC-32,no7,pp.583-592.A.B ENVENISTE,M.M ETIVIER and P.P RIOURET(1990).Adaptive Algorithms and Stochastic Approxima-tions.Series on Applications of Mathematics,(A.V.Balakrishnan,I.Karatzas,M.Yor,eds.).Springer,New York.A.B ENVENISTE,M.B ASSEVILLE,L.E L G HAOUI,R.N IKOUKHAH and A.S.W ILLSKY(1992).An optimum robust approach to statistical failure detection and identification.IFAC World Conference,Sydney, July1993.B IBLIOGRAPHY427 R.H.B ERK(1973).Some asymptotic aspects of sequential analysis.Annals Statistics,vol.1,no6,pp.1126-1138.R.H.B ERK(1975).Locally most powerful sequential test.Annals Statistics,vol.3,no2,pp.373-381.P.B ILLINGSLEY(1968).Convergence of Probability Measures.Wiley,New York.A.F.B ISSELL(1969).Cusum techniques for quality control.Applied Statistics,vol.18,pp.1-30.M.E.B IVAIKOV(1991).Control of the sample size for recursive estimation of parameters subject to abrupt changes.Automation and Remote Control,no9,pp.96-103.R.E.B LAHUT(1987).Principles and Practice of Information Theory.Addison-Wesley,Reading,MA.I.F.B LAKE and W.C.L INDSEY(1973).Level-crossing problems for random processes.IEEE r-mation Theory,vol.IT-19,no3,pp.295-315.G.B ODENSTEIN and H.M.P RAETORIUS(1977).Feature extraction from the encephalogram by adaptive segmentation.Proc.IEEE,vol.65,pp.642-652.T.B OHLIN(1977).Analysis of EEG signals with changing spectra using a short word Kalman estimator. Mathematical Biosciences,vol.35,pp.221-259.W.B¨OHM and P.H ACKL(1990).Improved bounds for the average run length of control charts based on finite weighted sums.Annals Statistics,vol.18,no4,pp.1895-1899.T.B OJDECKI and J.H OSZA(1984).On a generalized disorder problem.Stochastic Processes and their Applications,vol.18,pp.349-359.L.I.B ORODKIN and V.V.M OTTL’(1976).Algorithm forfinding the jump times of random process equation parameters.Automation and Remote Control,vol.37,no6,Part1,pp.23-32.A.A.B OROVKOV(1984).Theory of Mathematical Statistics-Estimation and Hypotheses Testing,Naouka, Moscow(in Russian).Translated in French under the title Statistique Math´e matique-Estimation et Tests d’Hypoth`e ses,Mir,Paris,1987.G.E.P.B OX and G.M.J ENKINS(1970).Time Series Analysis,Forecasting and Control.Series in Time Series Analysis,Holden-Day,San Francisco.A.VON B RANDT(1983).Detecting and estimating parameters jumps using ladder algorithms and likelihood ratio test.Proc.ICASSP,Boston,MA,pp.1017-1020.A.VON B RANDT(1984).Modellierung von Signalen mit Sprunghaft Ver¨a nderlichem Leistungsspektrum durch Adaptive Segmentierung.Doctor-Engineer Dissertation,M¨u nchen,RFA(in German).S.B RAUN,ed.(1986).Mechanical Signature Analysis-Theory and Applications.Academic Press,London. L.B REIMAN(1968).Probability.Series in Statistics,Addison-Wesley,Reading,MA.G.S.B RITOV and L.A.M IRONOVSKI(1972).Diagnostics of linear systems of automatic regulation.Tekh. Kibernetics,vol.1,pp.76-83.B.E.B RODSKIY and B.S.D ARKHOVSKIY(1992).Nonparametric Methods in Change-point Problems. Kluwer Academic,Boston.L.D.B ROEMELING(1982).Jal Econometrics,vol.19,Special issue on structural change in Econometrics. L.D.B ROEMELING and H.T SURUMI(1987).Econometrics and Structural Change.Dekker,New York. D.B ROOK and D.A.E VANS(1972).An approach to the probability distribution of Cusum run length. Biometrika,vol.59,pp.539-550.J.B RUNET,D.J AUME,M.L ABARR`E RE,A.R AULT and M.V ERG´E(1990).D´e tection et Diagnostic de Pannes.Trait´e des Nouvelles Technologies,S´e rie Diagnostic et Maintenance,Herm`e s,Paris(in French).428B IBLIOGRAPHY S.P.B RUZZONE and M.K AVEH(1984).Information tradeoffs in using the sample autocorrelation function in ARMA parameter estimation.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-32,no4, pp.701-715.A.K.C AGLAYAN(1980).Necessary and sufficient conditions for detectability of jumps in linear systems. IEEE Trans.Automatic Control,vol.AC-25,no4,pp.833-834.A.K.C AGLAYAN and R.E.L ANCRAFT(1983).Reinitialization issues in fault tolerant systems.Proc.Amer-ican Control Conf.,pp.952-955.A.K.C AGLAYAN,S.M.A LLEN and K.W EHMULLER(1988).Evaluation of a second generation reconfigu-ration strategy for aircraftflight control systems subjected to actuator failure/surface damage.Proc.National Aerospace and Electronic Conference,Dayton,OH.P.E.C AINES(1988).Linear Stochastic Systems.Series in Probability and Mathematical Statistics,Wiley, New York.M.J.C HEN and J.P.N ORTON(1987).Estimation techniques for tracking rapid parameter changes.Intern. Jal Control,vol.45,no4,pp.1387-1398.W.K.C HIU(1974).The economic design of cusum charts for controlling normal mean.Applied Statistics, vol.23,no3,pp.420-433.E.Y.C HOW(1980).A Failure Detection System Design Methodology.Ph.D.Thesis,M.I.T.,L.I.D.S.,Cam-bridge,MA.E.Y.C HOW and A.S.W ILLSKY(1984).Analytical redundancy and the design of robust failure detection systems.IEEE Trans.Automatic Control,vol.AC-29,no3,pp.689-691.Y.S.C HOW,H.R OBBINS and D.S IEGMUND(1971).Great Expectations:The Theory of Optimal Stop-ping.Houghton-Mifflin,Boston.R.N.C LARK,D.C.F OSTH and V.M.W ALTON(1975).Detection of instrument malfunctions in control systems.IEEE Trans.Aerospace Electronic Systems,vol.AES-11,pp.465-473.A.C OHEN(1987).Biomedical Signal Processing-vol.1:Time and Frequency Domain Analysis;vol.2: Compression and Automatic Recognition.CRC Press,Boca Raton,FL.J.C ORGE and F.P UECH(1986).Analyse du rythme cardiaque foetal par des m´e thodes de d´e tection de ruptures.Proc.7th INRIA Int.Conf.Analysis and optimization of Systems.Antibes,FR(in French).D.R.C OX and D.V.H INKLEY(1986).Theoretical Statistics.Chapman and Hall,New York.D.R.C OX and H.D.M ILLER(1965).The Theory of Stochastic Processes.Wiley,New York.S.V.C ROWDER(1987).A simple method for studying run-length distributions of exponentially weighted moving average charts.Technometrics,vol.29,no4,pp.401-407.H.C S¨ORG¨O and L.H ORV´ATH(1988).Nonparametric methods for change point problems.In Handbook of Statistics(P.R.Krishnaiah,C.R.Rao,eds.),vol.7,Elsevier,New York,pp.403-425.R.B.D AVIES(1973).Asymptotic inference in stationary gaussian time series.Advances Applied Probability, vol.5,no3,pp.469-497.J.C.D ECKERT,M.N.D ESAI,J.J.D EYST and A.S.W ILLSKY(1977).F-8DFBW sensor failure identification using analytical redundancy.IEEE Trans.Automatic Control,vol.AC-22,no5,pp.795-803.M.H.D E G ROOT(1970).Optimal Statistical Decisions.Series in Probability and Statistics,McGraw-Hill, New York.J.D ESHAYES and D.P ICARD(1979).Tests de ruptures dans un mod`e pte-Rendus de l’Acad´e mie des Sciences,vol.288,Ser.A,pp.563-566(in French).B IBLIOGRAPHY429 J.D ESHAYES and D.P ICARD(1983).Ruptures de Mod`e les en Statistique.Th`e ses d’Etat,Universit´e deParis-Sud,Orsay,France(in French).J.D ESHAYES and D.P ICARD(1986).Off-line statistical analysis of change-point models using non para-metric and likelihood methods.In Detection of Abrupt Changes in Signals and Dynamical Systems(M. Basseville,A.Benveniste,eds.).Lecture Notes in Control and Information Sciences,LNCIS77,Springer, New York,pp.103-168.B.D EVAUCHELLE-G ACH(1991).Diagnostic M´e canique des Fatigues sur les Structures Soumises`a des Vibrations en Ambiance de Travail.Th`e se de l’Universit´e Paris IX Dauphine(in French).B.D EVAUCHELLE-G ACH,M.B ASSEVILLE and A.B ENVENISTE(1991).Diagnosing mechanical changes in vibrating systems.Proc.SAFEPROCESS’91,Baden-Baden,FRG,pp.85-89.R.D I F RANCESCO(1990).Real-time speech segmentation using pitch and convexity jump models:applica-tion to variable rate speech coding.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-38,no5, pp.741-748.X.D ING and P.M.F RANK(1990).Fault detection via factorization approach.Systems and Control Letters, vol.14,pp.431-436.J.L.D OOB(1953).Stochastic Processes.Wiley,New York.V.D RAGALIN(1988).Asymptotic solutions in detecting a change in distribution under an unknown param-eter.Statistical Problems of Control,Issue83,Vilnius,pp.45-52.B.D UBUISSON(1990).Diagnostic et Reconnaissance des Formes.Trait´e des Nouvelles Technologies,S´e rie Diagnostic et Maintenance,Herm`e s,Paris(in French).A.J.D UNCAN(1986).Quality Control and Industrial Statistics,5th edition.Richard D.Irwin,Inc.,Home-wood,IL.J.D URBIN(1971).Boundary-crossing probabilities for the Brownian motion and Poisson processes and techniques for computing the power of the Kolmogorov-Smirnov test.Jal Applied Probability,vol.8,pp.431-453.J.D URBIN(1985).Thefirst passage density of the crossing of a continuous Gaussian process to a general boundary.Jal Applied Probability,vol.22,no1,pp.99-122.A.E MAMI-N AEINI,M.M.A KHTER and S.M.R OCK(1988).Effect of model uncertainty on failure detec-tion:the threshold selector.IEEE Trans.Automatic Control,vol.AC-33,no12,pp.1106-1115.J.D.E SARY,F.P ROSCHAN and D.W.W ALKUP(1967).Association of random variables with applications. Annals Mathematical Statistics,vol.38,pp.1466-1474.W.D.E WAN and K.W.K EMP(1960).Sampling inspection of continuous processes with no autocorrelation between successive results.Biometrika,vol.47,pp.263-280.G.F AVIER and A.S MOLDERS(1984).Adaptive smoother-predictors for tracking maneuvering targets.Proc. 23rd Conf.Decision and Control,Las Vegas,NV,pp.831-836.W.F ELLER(1966).An Introduction to Probability Theory and Its Applications,vol.2.Series in Probability and Mathematical Statistics,Wiley,New York.R.A.F ISHER(1925).Theory of statistical estimation.Proc.Cambridge Philosophical Society,vol.22, pp.700-725.M.F ISHMAN(1988).Optimization of the algorithm for the detection of a disorder,based on the statistic of exponential smoothing.In Statistical Problems of Control,Issue83,Vilnius,pp.146-151.R.F LETCHER(1980).Practical Methods of Optimization,2volumes.Wiley,New York.P.M.F RANK(1990).Fault diagnosis in dynamic systems using analytical and knowledge based redundancy -A survey and new results.Automatica,vol.26,pp.459-474.430B IBLIOGRAPHY P.M.F RANK(1991).Enhancement of robustness in observer-based fault detection.Proc.SAFEPRO-CESS’91,Baden-Baden,FRG,pp.275-287.P.M.F RANK and J.W¨UNNENBERG(1989).Robust fault diagnosis using unknown input observer schemes. In Fault Diagnosis in Dynamic Systems-Theory and Application(R.Patton,P.Frank,R.Clark,eds.). International Series in Systems and Control Engineering,Prentice Hall International,London,UK,pp.47-98.K.F UKUNAGA(1990).Introduction to Statistical Pattern Recognition,2d ed.Academic Press,New York. S.I.G ASS(1958).Linear Programming:Methods and Applications.McGraw Hill,New York.W.G E and C.Z.F ANG(1989).Extended robust observation approach for failure isolation.Int.Jal Control, vol.49,no5,pp.1537-1553.W.G ERSCH(1986).Two applications of parametric time series modeling methods.In Mechanical Signature Analysis-Theory and Applications(S.Braun,ed.),chap.10.Academic Press,London.J.J.G ERTLER(1988).Survey of model-based failure detection and isolation in complex plants.IEEE Control Systems Magazine,vol.8,no6,pp.3-11.J.J.G ERTLER(1991).Analytical redundancy methods in fault detection and isolation.Proc.SAFEPRO-CESS’91,Baden-Baden,FRG,pp.9-22.B.K.G HOSH(1970).Sequential Tests of Statistical Hypotheses.Addison-Wesley,Cambridge,MA.I.N.G IBRA(1975).Recent developments in control charts techniques.Jal Quality Technology,vol.7, pp.183-192.J.P.G ILMORE and R.A.M C K ERN(1972).A redundant strapdown inertial reference unit(SIRU).Jal Space-craft,vol.9,pp.39-47.M.A.G IRSHICK and H.R UBIN(1952).A Bayes approach to a quality control model.Annals Mathematical Statistics,vol.23,pp.114-125.A.L.G OEL and S.M.W U(1971).Determination of the ARL and a contour nomogram for CUSUM charts to control normal mean.Technometrics,vol.13,no2,pp.221-230.P.L.G OLDSMITH and H.W HITFIELD(1961).Average run lengths in cumulative chart quality control schemes.Technometrics,vol.3,pp.11-20.G.C.G OODWIN and K.S.S IN(1984).Adaptive Filtering,Prediction and rmation and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.R.M.G RAY and L.D.D AVISSON(1986).Random Processes:a Mathematical Approach for Engineers. Information and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.C.G UEGUEN and L.L.S CHARF(1980).Exact maximum likelihood identification for ARMA models:a signal processing perspective.Proc.1st EUSIPCO,Lausanne.D.E.G USTAFSON, A.S.W ILLSKY,J.Y.W ANG,M.C.L ANCASTER and J.H.T RIEBWASSER(1978). ECG/VCG rhythm diagnosis using statistical signal analysis.Part I:Identification of persistent rhythms. Part II:Identification of transient rhythms.IEEE Trans.Biomedical Engineering,vol.BME-25,pp.344-353 and353-361.F.G USTAFSSON(1991).Optimal segmentation of linear regression parameters.Proc.IFAC/IFORS Symp. Identification and System Parameter Estimation,Budapest,pp.225-229.T.H¨AGGLUND(1983).New Estimation Techniques for Adaptive Control.Ph.D.Thesis,Lund Institute of Technology,Lund,Sweden.T.H¨AGGLUND(1984).Adaptive control of systems subject to large parameter changes.Proc.IFAC9th World Congress,Budapest.B IBLIOGRAPHY431 P.H ALL and C.C.H EYDE(1980).Martingale Limit Theory and its Application.Probability and Mathemat-ical Statistics,a Series of Monographs and Textbooks,Academic Press,New York.W.J.H ALL,R.A.W IJSMAN and J.K.G HOSH(1965).The relationship between sufficiency and invariance with applications in sequential analysis.Ann.Math.Statist.,vol.36,pp.576-614.E.J.H ANNAN and M.D EISTLER(1988).The Statistical Theory of Linear Systems.Series in Probability and Mathematical Statistics,Wiley,New York.J.D.H EALY(1987).A note on multivariate CuSum procedures.Technometrics,vol.29,pp.402-412.D.M.H IMMELBLAU(1970).Process Analysis by Statistical Methods.Wiley,New York.D.M.H IMMELBLAU(1978).Fault Detection and Diagnosis in Chemical and Petrochemical Processes. Chemical Engineering Monographs,vol.8,Elsevier,Amsterdam.W.G.S.H INES(1976a).A simple monitor of a system with sudden parameter changes.IEEE r-mation Theory,vol.IT-22,no2,pp.210-216.W.G.S.H INES(1976b).Improving a simple monitor of a system with sudden parameter changes.IEEE rmation Theory,vol.IT-22,no4,pp.496-499.D.V.H INKLEY(1969).Inference about the intersection in two-phase regression.Biometrika,vol.56,no3, pp.495-504.D.V.H INKLEY(1970).Inference about the change point in a sequence of random variables.Biometrika, vol.57,no1,pp.1-17.D.V.H INKLEY(1971).Inference about the change point from cumulative sum-tests.Biometrika,vol.58, no3,pp.509-523.D.V.H INKLEY(1971).Inference in two-phase regression.Jal American Statistical Association,vol.66, no336,pp.736-743.J.R.H UDDLE(1983).Inertial navigation system error-model considerations in Kalmanfiltering applica-tions.In Control and Dynamic Systems(C.T.Leondes,ed.),Academic Press,New York,pp.293-339.J.S.H UNTER(1986).The exponentially weighted moving average.Jal Quality Technology,vol.18,pp.203-210.I.A.I BRAGIMOV and R.Z.K HASMINSKII(1981).Statistical Estimation-Asymptotic Theory.Applications of Mathematics Series,vol.16.Springer,New York.R.I SERMANN(1984).Process fault detection based on modeling and estimation methods-A survey.Auto-matica,vol.20,pp.387-404.N.I SHII,A.I WATA and N.S UZUMURA(1979).Segmentation of nonstationary time series.Int.Jal Systems Sciences,vol.10,pp.883-894.J.E.J ACKSON and R.A.B RADLEY(1961).Sequential and tests.Annals Mathematical Statistics, vol.32,pp.1063-1077.B.J AMES,K.L.J AMES and D.S IEGMUND(1988).Conditional boundary crossing probabilities with appli-cations to change-point problems.Annals Probability,vol.16,pp.825-839.M.K.J EERAGE(1990).Reliability analysis of fault-tolerant IMU architectures with redundant inertial sen-sors.IEEE Trans.Aerospace and Electronic Systems,vol.AES-5,no.7,pp.23-27.N.L.J OHNSON(1961).A simple theoretical approach to cumulative sum control charts.Jal American Sta-tistical Association,vol.56,pp.835-840.N.L.J OHNSON and F.C.L EONE(1962).Cumulative sum control charts:mathematical principles applied to their construction and use.Parts I,II,III.Industrial Quality Control,vol.18,pp.15-21;vol.19,pp.29-36; vol.20,pp.22-28.432B IBLIOGRAPHY R.A.J OHNSON and M.B AGSHAW(1974).The effect of serial correlation on the performance of CUSUM tests-Part I.Technometrics,vol.16,no.1,pp.103-112.H.L.J ONES(1973).Failure Detection in Linear Systems.Ph.D.Thesis,Dept.Aeronautics and Astronautics, MIT,Cambridge,MA.R.H.J ONES,D.H.C ROWELL and L.E.K APUNIAI(1970).Change detection model for serially correlated multivariate data.Biometrics,vol.26,no2,pp.269-280.M.J URGUTIS(1984).Comparison of the statistical properties of the estimates of the change times in an autoregressive process.In Statistical Problems of Control,Issue65,Vilnius,pp.234-243(in Russian).T.K AILATH(1980).Linear rmation and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.L.V.K ANTOROVICH and V.I.K RILOV(1958).Approximate Methods of Higher Analysis.Interscience,New York.S.K ARLIN and H.M.T AYLOR(1975).A First Course in Stochastic Processes,2d ed.Academic Press,New York.S.K ARLIN and H.M.T AYLOR(1981).A Second Course in Stochastic Processes.Academic Press,New York.D.K AZAKOS and P.P APANTONI-K AZAKOS(1980).Spectral distance measures between gaussian pro-cesses.IEEE Trans.Automatic Control,vol.AC-25,no5,pp.950-959.K.W.K EMP(1958).Formula for calculating the operating characteristic and average sample number of some sequential tests.Jal Royal Statistical Society,vol.B-20,no2,pp.379-386.K.W.K EMP(1961).The average run length of the cumulative sum chart when a V-mask is used.Jal Royal Statistical Society,vol.B-23,pp.149-153.K.W.K EMP(1967a).Formal expressions which can be used for the determination of operating character-istics and average sample number of a simple sequential test.Jal Royal Statistical Society,vol.B-29,no2, pp.248-262.K.W.K EMP(1967b).A simple procedure for determining upper and lower limits for the average sample run length of a cumulative sum scheme.Jal Royal Statistical Society,vol.B-29,no2,pp.263-265.D.P.K ENNEDY(1976).Some martingales related to cumulative sum tests and single server queues.Stochas-tic Processes and Appl.,vol.4,pp.261-269.T.H.K ERR(1980).Statistical analysis of two-ellipsoid overlap test for real time failure detection.IEEE Trans.Automatic Control,vol.AC-25,no4,pp.762-772.T.H.K ERR(1982).False alarm and correct detection probabilities over a time interval for restricted classes of failure detection algorithms.IEEE rmation Theory,vol.IT-24,pp.619-631.T.H.K ERR(1987).Decentralizedfiltering and redundancy management for multisensor navigation.IEEE Trans.Aerospace and Electronic systems,vol.AES-23,pp.83-119.Minor corrections on p.412and p.599 (May and July issues,respectively).R.A.K HAN(1978).Wald’s approximations to the average run length in cusum procedures.Jal Statistical Planning and Inference,vol.2,no1,pp.63-77.R.A.K HAN(1979).Somefirst passage problems related to cusum procedures.Stochastic Processes and Applications,vol.9,no2,pp.207-215.R.A.K HAN(1981).A note on Page’s two-sided cumulative sum procedures.Biometrika,vol.68,no3, pp.717-719.B IBLIOGRAPHY433 V.K IREICHIKOV,V.M ANGUSHEV and I.N IKIFOROV(1990).Investigation and application of CUSUM algorithms to monitoring of sensors.In Statistical Problems of Control,Issue89,Vilnius,pp.124-130(in Russian).G.K ITAGAWA and W.G ERSCH(1985).A smoothness prior time-varying AR coefficient modeling of non-stationary covariance time series.IEEE Trans.Automatic Control,vol.AC-30,no1,pp.48-56.N.K LIGIENE(1980).Probabilities of deviations of the change point estimate in statistical models.In Sta-tistical Problems of Control,Issue83,Vilnius,pp.80-86(in Russian).N.K LIGIENE and L.T ELKSNYS(1983).Methods of detecting instants of change of random process prop-erties.Automation and Remote Control,vol.44,no10,Part II,pp.1241-1283.J.K ORN,S.W.G ULLY and A.S.W ILLSKY(1982).Application of the generalized likelihood ratio algorithm to maneuver detection and estimation.Proc.American Control Conf.,Arlington,V A,pp.792-798.P.R.K RISHNAIAH and B.Q.M IAO(1988).Review about estimation of change points.In Handbook of Statistics(P.R.Krishnaiah,C.R.Rao,eds.),vol.7,Elsevier,New York,pp.375-402.P.K UDVA,N.V ISWANADHAM and A.R AMAKRISHNAN(1980).Observers for linear systems with unknown inputs.IEEE Trans.Automatic Control,vol.AC-25,no1,pp.113-115.S.K ULLBACK(1959).Information Theory and Statistics.Wiley,New York(also Dover,New York,1968). K.K UMAMARU,S.S AGARA and T.S¨ODERSTR¨OM(1989).Some statistical methods for fault diagnosis for dynamical systems.In Fault Diagnosis in Dynamic Systems-Theory and Application(R.Patton,P.Frank,R. Clark,eds.).International Series in Systems and Control Engineering,Prentice Hall International,London, UK,pp.439-476.A.K USHNIR,I.N IKIFOROV and I.S AVIN(1983).Statistical adaptive algorithms for automatic detection of seismic signals-Part I:One-dimensional case.In Earthquake Prediction and the Study of the Earth Structure,Naouka,Moscow(Computational Seismology,vol.15),pp.154-159(in Russian).L.L ADELLI(1990).Diffusion approximation for a pseudo-likelihood test process with application to de-tection of change in stochastic system.Stochastics and Stochastics Reports,vol.32,pp.1-25.T.L.L A¨I(1974).Control charts based on weighted sums.Annals Statistics,vol.2,no1,pp.134-147.T.L.L A¨I(1981).Asymptotic optimality of invariant sequential probability ratio tests.Annals Statistics, vol.9,no2,pp.318-333.D.G.L AINIOTIS(1971).Joint detection,estimation,and system identifirmation and Control, vol.19,pp.75-92.M.R.L EADBETTER,G.L INDGREN and H.R OOTZEN(1983).Extremes and Related Properties of Random Sequences and Processes.Series in Statistics,Springer,New York.L.L E C AM(1960).Locally asymptotically normal families of distributions.Univ.California Publications in Statistics,vol.3,pp.37-98.L.L E C AM(1986).Asymptotic Methods in Statistical Decision Theory.Series in Statistics,Springer,New York.E.L.L EHMANN(1986).Testing Statistical Hypotheses,2d ed.Wiley,New York.J.P.L EHOCZKY(1977).Formulas for stopped diffusion processes with stopping times based on the maxi-mum.Annals Probability,vol.5,no4,pp.601-607.H.R.L ERCHE(1980).Boundary Crossing of Brownian Motion.Lecture Notes in Statistics,vol.40,Springer, New York.L.L JUNG(1987).System Identification-Theory for the rmation and System Sciences Series, Prentice Hall,Englewood Cliffs,NJ.。
adam微分方程
在数学和计算机科学领域,"Adam"(Adaptive Moment Estimation)是一种优化算法,常用于训练神经网络和解决优化问题。
它是Adam 优化器的缩写。
Adam优化算法是一种结合了动量(momentum)和自适应学习率(adaptive learning rate)的方法,它在处理非凸优化问题和高维空间中的参数优化时表现出色。
Adam算法的基本思想是根据梯度的一阶矩估计(均值)和二阶矩估计(不中心化方差)来更新参数。
具体来说,Adam算法使用以下公式来更新参数:
1. 计算梯度的一阶矩估计(均值):m = β₁ * m + (1 - β₁) * g
2. 计算梯度的二阶矩估计(不中心化方差):v = β₁ * v + (1 - β₁) * g²
3. 修正一阶和二阶矩的偏差:m = m / (1 - β₁^t) 和v = v / (1 - β₁^t)
4. 更新参数:θ= θ - α * m / (sqrt(v) + ε)
其中,
- m 是一阶矩估计,表示过去梯度的均值。
- v 是二阶矩估计,表示过去梯度的不中心化方差。
- g 是当前的梯度。
- β₁和β₁是用于控制一阶和二阶矩估计的指数衰减率。
- α是学习率。
- t是迭代的次数。
- ε是一个小的常数,用于防止分母为零。
Adam算法的优点在于可以自适应地调整学习率,使得不同参数在不同时间步上可以有不同的学习率。
这样可以在训练过程中更有效地优化模型参数,加速收敛并提高训练效率。
因此,Adam算法在深度学习和神经网络的训练中得到广泛应用。
航空飞行器的结构损伤诊断技术
Health Forecast for Aircraft Based on Adaptive MVGFM 11This work is supported by Aeronautic Science Foundation of China, ID2007ZD54006; National Postdoctoral Science Foundation of China,ID20070421062; The Educational Department Science Foundation of Liaoning Province, ID2008544; Doctor Start-up Science Foundation of Shenyang Institute of Aeronautical Engineering, ID06YB19.Jianguo Cui 1,2,3, Desheng Song 11. Automatization CollegeShenyang Instit X te of Aeronautical Engineering 2. School of Information Science & EngineeringNortheastern University3. Shenyang Aircraft Design & Research InstituteShenyang, Chinae-mail: gordon_cjg@Ming Li, Changjun Xu, Peng ShiShenyang Aircraft Design & Research InstituteShenyang, ChinaAbstract —A new kind of health state forecast method for the aircraft, based on the adaptive multi-variable grey forecast model (MVGFM), is presented in this paper. The advanced acoustic emission (AE) technique is used to monitor the aircraft stabilizer health state and get the AE information. The original AE signals are decomposed with the wavelet transform, and the maximum of absolute value (MAV), average of absolute value (AAV), standard deviation (SD) and singular value (SV) of the fourth layer wavelet decomposition coefficients are respectively extracted to form eigenvectors. Then the adaptive MVGFM(1,n,ȕ) is established with the eigenvectors. The parameter ȕ can be rectified by the errors between the forecast values and the actual ones. So the forecast precision can be adaptively improved. Experiments show that the MVGFM(1,n,ȕ) can forecast the aircraft stabilizer fatigue crack more accurately than the MGM(1,n). It presents a new method for forecasting the health state of aircraft structure components. And the health forecast method is also applied in other complicated structure systems.Keywords-aircraft; adaptive; multi-variable grey forecast model; acoustic emmisionI. I NTRODUCTIONThe forecast technique to the health state of aircraft is animportant part of the fault prognostic and health management (PHM) [1][2][3] technique. Using the AE technique to effectively monitor the health state of the aircraft structure systems is one of the main ways which are adopted in the international nondestructive testing area now. In some European countries and the America, this technique has been successfully applied in the aviation and spaceflight fields [4][5][6]. As we know, uncertain problems are existent widely. Generally, a grey system is the one which contains uncertain connotation and extension. Recently, with the development of grey theory, grey models are used widely in the fault forecast and other fields [7], such as GM(1,1), MGM(1,n) and so on. MGM(1,n) is the improved model of GM(1,1). However, both of the two models have worse forecast effect for the random sequences [8][9], and sometimes the forecast values can not be accepted indeed. Because the healthy information of aircraft key parts have strong randomness, the adaptive MVGFM(1,n,ȕ) is established in the health forecast research of aircraft so as to improve the forecast precision.II.A DAPTIVE MVGFM (1,n,ȕ)The principle of grey forecast theory is to consider the forecasted system as a grey system. Then it uses the known information to speculate the characters, status and developing trends of the unknown information. Until now, this theory has received many achievements in the related fields [10].The grey forecast algorithm based on the adaptive MVGFM(1,n,ȕ) is described as follows:)()0(k x i are the time-domain grey sequences, and )()1(k x i are the relevant one–time accumulated generatingsequences, so(1)(0)1()()kii j x k x j ==¦ (1)Where n i,,2,1"=; m k ,,2,1"=, and 4≥m . Thenwe define T n k x k x k x k X ))(,),(),(()()1()1(2)1(1)1("=, and the adaptive MVGFM(1,n,ȕ) is the following system of one-order ordinary differential equations which is solvedthrough an adaptive parameter ȕB AX dtdX =+)1()1( (2)Where A and B are parameter matrices.During the process of computing A and B , We introduce a parameter matrix Ti in i i b a a a a ),,,,(21"=∧, then the estimated values ∧A and ∧B can be expressed asTin i i a a a A ),,,(21"=∧; T i b B )(=∧(3)Where n i ,,2,1"=.2009 International Conference on Measuring Technology and Mechatronics AutomationAccording to the Least Square Method, we can get the values of ∧a , ∧A and ∧B by the following formulasY L L L aTT 1)(−∧= (4)Where matrices12(,,,,,,1)j n L L L L L =""(5)(1)(1)(1)(1)(1)(1)[(2)(1)(1)][(3)(1)(2)][()(1)(1)]j j j j j j j x x x x L x m x m ββββββªº−+−«»−+−«»=«»«»«»−+−−¬¼# (6)T i i i m x x x Y ))(,),3(),2(()0()0()0("= (7)Where n j i ,,2,1,"=. And T L are the transpose of thematrix L , and £ is an adaptive parameter which will be explained in the following papers. According to (2), the solution of the model can be expressed as(1)(1)(1)(1)1(1)()(1)()A k A k A k X k e X e A eI B ∧∧∧∧∧−−−−−=−− (8)Where ",2,1=kSo the forecast values of the adaptive MVGFM(1,n,ȕ) will be got as)1()1()0()0(X X=∧ (9)",3,2),1()()()1()1()0(=−−=∧∧∧k k X k X k X (10) During the algorithm, a variable l Δ is introduced as)()()(min)0()0()0(w x w x w x il il ilil ∧−=Δ (11) And we define 00=Δ. Where i is the number of time-domain grey sequences, and n i ,,2,1"=. l is the circular number of the model program. And d l ,,1,0"=. Among them, d is the final circular time of the program. w is the number of forecast data. And ",2,1=w . In the experiment of this paper, we choose 16=w . Then wechange the adaptive parameter ȕ as1l ll ββ+=+Δ (12)Where 0βis the initialized value of β. And we choose 0β=0.5.In the adaptive MVGFM(1,n,ȕ), the parameter ȕ isrectified according to (12) and the new value is put into (6) again during every circulation of the program. In this way, we can get j L and make the next forecast, so as to followthe changing trend of signal and realize the adaptivity of the model.III. T HE F EATURE E XTRACTION B ASED O N AE I NFORMATION A ND T HE W AVELET T RANSFORM Acoustic emission (AE) is a phenomenon of producing instant elastic wave when the local area source releases energy rapidly [11]. Because most of the materials have AE phenomenon when they distort and split, we can detect and gather the AE signals. Then the healthy forecast for the aircraft state can be made by analyzing, disposing and extracting the features of AE signals.As we know, wavelet transform has the multi-scale characteristics. The basic method of it is to choose a function as a basic wavelet and the time-domain integral of the function must be zero. By flexing and moving the basic wavelet in parallel, a function family which can compose a frame of function space is created [12]. Then the signal is decomposed by projecting to the frame. During the process of extracting the features of signals, the choice of wavelet is very important. Aiming at the AE signals of aircraft stabilizer, we have made many experiments. And they show that if we make four layers decomposition on the AE signals by using coif3 wavelet, and extract the MAV, AAV, SD and SV of the fourth wavelet decomposed coefficients as features of the AE signals, then we will get a better forecast effect.During the process of loading to a certain aircraft stabilizer, we choose the AE signals which have cracks as the researching object. In the experiment, 19 groups of AE signals are collected and they are decomposed with coif3 wavelet. Then the MAV, AAV, SD and SV features of the fourth layer low frequency coefficients in the wavelet decomposition structure are extracted. For example, to one group of the collected AE signals X=[0.000305, 0.000305, 0.000305, …, 0.001207, 0.000610]T 1024x1, the MAV, AAV, SD and SV features of the fourth low frequency coefficients areMAV=[ca4MAV ]=0.1058; AAV=[ca4AAV ]=0.2631; SD=[ca4SD ]= 0.1261; SV=[ca4 SV ]= 0.6036. In the same way, we can deal with the other 18 groups of AE signals, and each group will extract MAV, AAV, SD and SV features. Then the same features of the 19 groups of signals are made to be one eigenvector respectively. In this way, we can get four eigenvectors and the dimension of each eigenvector is 19. They arex_MAV=[0.1058 0.0683 0.0501… 0.0778 0.1940]T 19x1; x_AAV=[0.2631 0.1245 0.1232… 0.1578 0.3880]T 19x1; x_SD=[0.1261 0.0759 0.0596… 0.0873 0.2240]T 19x1; x_SV=[0.6036 0.3634 0.2856… 0.4180 1.0721]T 19x1.IV. E XPERIMENT R ESEARCHBecause the aircraft stabilizer is a complicated component, there is much information that can change the healthy state of it. However, we can't denote the relations among the information accurately. Therefore, we can consider the information system which causes the change of healthy state of aircraft stabilizer as a grey system. In theexperiment, the real aircraft stabilizer is loaded to make fatigue damages experiment by using the special experimental equipment. We imported the advanced full digital and multi-channel DISP AE detection system of PAC from America, and it is used to test and gather the healthy information in time. The original AE signal gathered by theAE detection system is showed in Figure 1. In this experiment, the four eigenvectors acquired in section 3 are combined into a data matrix. So this matrix is made up of 19 groups (each group contains 4 different typesof features) of eigenvalues which change with time, and it ismarked as x_0[x_MAV; x_AAV; x_SD; x_SV]19x4.Namely x_0 = [0.1058 0.2631 0.1261 0.6036; 0.0683 0.1245 0.0759 0.3634; …; 0.0778 0.1578 0.0873 0.4180;0.1940 0.3880 0.2240 1.0721]19x4.Figure 1. The original AE signal of the aircraft stabilizerDuring the experiment, the former 15-row data of thematrix are used to establish the adaptive MVGFM(1,n,ȕ)and the later 4-row data are used to test the model accuracy.The concrete process can be described as follows: Firstly,the data matrix x_0 is initialized [13] to be the grey modeling data x, and x=[1.0000 1.0000 1.0000 1.0000;0.6456 0.4732 0.6019 0.6021; …; 1.8336 1.4747 1.77641.7762]19x4; then the former 15-group data of x are took out to constitute the modeling sequences and make5.001==ββat the same time. According to (1)-(7), theadaptive MVGFM(1,n,ȕ) is established and we can forecastthe 16th -group of data by (8)-(10). After that, the 16th-group data of x is add to the modeling sequences, and the 1st -group data of the former modeling sequences is threw away at the same time. In this way, we can keep the length of themodeling sequences constant. Then the parameter ȕ will bechanged according to (11)-(12) and the next-step forecastwill be made. The algorithm will be repeated as it is expressed above, and finally we will get 4 groups of forecastdata. These data are the corresponding forecasted values of the 16th -group to the 19th -group data of x. In order to showthe advantage of the adaptive MVGFM(1,n,ȕ), we also useMGM(1,n) to make forecast research to the MAV feature.The forecast results of the two models are showed respectively in Figure 2 and Figure 3. Because the grey forecast error has the characteristic of randomness, this paper makes the average error as the estimating index. The definitions [13] of the relative error and the average error are described respectively as %100)()()()()0()0()0(×−=∧k x k x k x k i i i relative ε (13) ¦==nk relative average k n avg 1)(1)(εε (14)Where )()0(k x i is the actual value of the No.k and)()0(k x i ∧ is the corresponding forecast value of the No.k .Figure 2. The forecast results of MAV by the MGM(1,n)Figure 3. The forecast results of MAV by the adaptiveMVGFM(1,n,ȕ) According to (13) and (14), we can compute the relative errors and the average errors of the later 4 data (that is the16th to the 19th data) of the MAV feature which are used for the model forecast test. The results are showed in TABLE I.A E S i g n a l /VSampling PointT h e v a l u e o f M A V (/V )Time (t/s)T h e v a l u e o f M A V (/V )Time (t/s)TABLE I. T HE F ORECAST R ESULTS O F MAV B Y T HE MGM(1,n)A ND T HE A DAPTIVE MVGFM(1,n,ȕ)Model No.ofDataActualValueForecastValueAverageError(%)MGM (1,n) 16 1.0153 0.898729.5617 0.9707 1.091818 0.7353 1.291719 1.8336 1.4926Adaptive MVGFM(1,n,ȕ) 16 1.0153 0.89879.5417 0.9707 0.739018 0.7353 0.741419 1.8336 1.7972According to TABLE I, the adaptive MVGFM(1,n,ȕ) has a higher forecast precision compared with the MGM(1,n). Because the signal which has cracks is used in the experiment, the wave of it can reflect the changing trend of fault information. From Figure 2 and Figure 3, we can see that the adaptive MVGFM(1,n,ȕ) has a good dynamic track capacity for the fault information, so this model can be used in the fault forecast for the aircraft.V.C ONCLUSIONSIn order to well and truly forecast the crack fault information of the aircraft stabilizer, the parameters of grey model should reflect the changing trend of the crack fault information in time. The adaptive MVGFM(1,n,ȕ) is introduced because that the parameters of GM(1,1) and MGM(1,n) are constant and the two models can not make better forecast to the random sequences. The experiments show that the forecast average error of the MGM(1,n) is 29.56 % and that of adaptive MVGFM(1,n,ȕ) is 9.54 %. The forecast results of adaptive MVGFM(1,n,ȕ)can preferably follow the changing trend of the signal. And the adaptive MVGFM(1,n,ȕ) can more accurately forecast the health state of the aircraft stabilizer than the MGM(1,n). This method will have a wide application foreground in the field of health forecast for the aircraft structure components and many other complicated structure systems.R EFERENCES[1] E. Scanff, K.L. Feldman, S. Ghelam, P. Sandborn, M. Glade, B.Foucher, “Life Cycle Cost Impact of Using Prognostic Health Management (PHM) for Helicopter Avionics”, Microelectronics Reliability, 2007, 47 (12), pp. 1-16.[2]J. Banks, K. Reichard, E. Crow, K. Nickell, “How engin eers canconduct cost-benefit analysis for PHM systems”, Proceedings IEEE Aerospace Conference, 2005, (3), pp. 3958-3967.[3]Sebastien Grondel etc. Fatigue crack monitoring of riveted aluminiumstrap joints by Lamb wave analysis and acoustic emission measurement techniques.NDT&E International, 35, 2002, p.137-146. [4]NASA, and DOT-Volpe Center, “NASA’s Wake AcousticsResearch”, 4th NASA Integrated CNS Conference and Workshop Fairfax, VA, 2004, (4), pp. 26-30.[5]Anindya Ghoshal, William H. Prosser, Goutham Kirikera, Mark J.Schulz, Derke J. Hughes, Wally Orisamolu, “Concepts and Development of Bio-Inspired Distributed Embedded Wired/Wireless Sensor Array Architectures for Acoustic Wave Sensing in Integrated Aerospace Vehicles”, The 4th International Workshop on Structural Health Monitoring, 2003, pp. 1-9.[6]Suraj Nair, Rajesh Rajaram, Andrew J Meyers, Tim C. Lieuwen .“Acoustic and Ion Sensing of Lean Blowout in an Aircraft Combustor Simulator,” American Institute of Aeronautics and Astronautics, September 2005, 32, pp.1-8.[7]Wenbin Hu, Changzhi Yang, “Grey model of direct solar radiationintensity on the horizontal plane for cooling loads calculation”, Building and Environment, 2000, 35, pp. 587-593.[8]LIU ShouDao, ZHANG LaiBin, WANG ZhaoHui, et al, “Forecastingdiagnosis of rolling bearing by GM model”, Lubrication Engineering, 2000, (2), pp. 38-39.[9]Yang Jiangtian, Yue Weiliang, “Application of grey model tomachinery faults prediction”, Journal of Mechanical Strength, 2001,23 (3), pp. 277-279.[10] A. I. Dounis, P. Tiropanis, D. Tseles, G. Nikolaou, and G. P. Syrcos,“A Comparison of Grey Model and Fuzzy Predictive Model for Time Series”, INTERNATIONAL JOURNAL OF COMPUTATIONAL INTELLIGENCE, 2005, 2 (3), pp. 176-181.[11]Sebastien Grondel etc, “Fatigue crack monitoring of rivetedaluminium strap joints by Lamb wave analysis and acoustic emission measurement techniques”, NDT&E International 35, 2002, pp. 137-146.[12]S. Prabhakar, A.R. Mohanty, A.S Sekhar, “Application of discretewavelet transform for detection of ball bearing race faults”, Tribology International, 2002, 35, pp. 793-800.[13]Deng Julong, Grey system theory, Huazhong Scienceand TechnologyUniversity Press, Wuhan, 2002, 9.。
飞行员有关英语作文高中
Pilots are an integral part of the aviation industry,and their role extends beyond just flying aircraft.Here are some key points to consider when writing an essay about pilots in a high school context:1.Introduction to the Profession:Begin by introducing the profession of a pilot, highlighting the importance of their role in transportation,both commercial and private.cation and Training:Discuss the educational requirements to become a pilot.This includes obtaining a high school diploma,followed by specialized training in aviation schools or universities.Mention the need for a private pilots license,followed by a commercial pilots license,and the necessary flight hours.3.Physical and Mental Requirements:Pilots must meet stringent physical and mental health standards.Discuss the regular medical examinations and the psychological tests that pilots undergo to ensure they are fit to fly.4.Responsibilities:Elaborate on the various responsibilities of a pilot,such as preflight checks,communication with air traffic control,navigating the aircraft,and ensuring the safety of passengers and crew.5.Skills and Qualities:Pilots need a range of skills including quick decisionmaking, problemsolving,multitasking,and excellent communication skills.They must also have a deep understanding of meteorology,navigation,and aircraft systems.6.The Role of Technology:With the advancement of technology,discuss how pilots are adapting to new systems and technologies,such as glass cockpits,advanced navigation systems,and autopilot features.7.Career Opportunities:Highlight the different career paths available to pilots,such as commercial airline pilots,military pilots,cargo pilots,or flight instructors.8.Challenges and Risks:Address the challenges pilots face,including long hours, irregular schedules,and the inherent risks associated with flying,such as weather conditions and mechanical issues.9.The Future of Piloting:Discuss the future of piloting,including the potential impact of autonomous aircraft and the need for pilots to adapt to these changes.10.Conclusion:Conclude the essay by summarizing the importance of pilots in the aviation industry and the multifaceted nature of their profession.Remember to use clear and concise language,provide examples where appropriate,and ensure that your essay flows logically from one point to the next.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
to compute the overall estimate. When the range of the expected control parameter is wide, however, IMM needs a large number of models to provide consistent estimation. One promising solution to this problem is to use variable-structure estimation algorithms [5-7]. An alternative, nontrivial solution is proposed in this paper. It requires a minimal number of models (one for rectilinear motion, one for right turn and one for left turn) to cover the range of all possible target maneuvers. The proposed adaptive IMM algorithm estimates the difference between the control parameter assumed in the current model and its real value. The method has been applied at first for marine targets tracking in [10], where the range of the control parameter is very narrow. To cover the very wide respective range for air targets an additional adaptation mechanism is applied. It is concerned with the IMM transition probabilities and the fudge factor and the noise covariance matrices of the maneuvering models. The algorithm’s performance is evaluated by Monte Carlo simulations and the effectiveness is illustrated by a comparison with 3and 5-model standard IMM algorithm versions.
where
Pi ,k / k = Pi ,k / k −1 − Ki ,k S i K i' ,k , (12) $i ,k / k and x $i ,k / k −1 are the filtered and the where x
ˆi given by: predicted estimates of x k ; f i = ∂f i ∂x
Proc. 1999 International Conf. on Information Fusion, Silicon Valley, CA, USA, July 1999
& = gnT , v
&= ϕ
∗ N
− gn ∗ N
/ v,
$ i ,k / k −1 = f x $ i ,k −1/ k −1 , n ∗ x N i ,k − 1 ,
xk = ( X k
Yk
ϕk
γ i and S i ,k are the filter residual process and its
1 0 $ fi x = 0 0 0
$i,k / k −1 $ i ,k / k −1cosϕ 0 Tv $i ,k / k −1 $ i ,k / k −1sinϕ 1 − Tv 0 0 0 1 0 0 −
2. Aircraft Models
The target motion is described in the horizontal plane xOy by the commonly used model [8]:
& = V sin ϕ , X & = V cos ϕ , Y
1 Partially supported by the Bulgarian National Science Fund - Contract No. I-808/98. * Supported by ONR via Grant N00014-97-1-0570, NSF via Grant ECS-9734285, and LEQSF via Grant (1996-99)-RD-A32.
1. Introduction
In recent years the design of reliable and effective multiple-model (MM) algorithms for maneuvering target tracking is a subject of extensive research (see e.g., [1-7]). These algorithms are used to overcome problems caused by structural and parametric uncertainties. The Interacting Multiple-Model (IMM) algorithm is the most commonly used MM estimation algorithm among them. The lack of knowledge about the target’s control parameters is overcome in it by introducing a set of fixed control parameters. This set is expected to cover the range of possible parameter changes. A set of models represents the system behavior in each fixed control value. Kalman filters based on these models are running in parallel and their estimates are finally fused [1-3, 6]
$i ,k / k −1 Tsinϕ $i ,k / k −1 Tcosϕ ∗ $∗ Tg nNi + ∆ n Ni ,k / k −1
(
)
$i2,k / k −1 v 1 0
ቤተ መጻሕፍቲ ባይዱ Tg $i ,k / k −1 v 0 1 0 0
presence of unknown control parameters n N and
ˆ x
n∗ N ,k
= n N ,k sin γ k , γ k = arc cos( 1 / n N ,k ) ;
v k ) should be estimated in the
'
k is the current discrete time; T is the radar sampling interval. The state vector
$ i ,k / k −1 , γ i ,k = y k − Hi x
(
)
(7) (8)
Pi ,k / k −1 = φ i f i x Pi ,k −1 / k −1 f i x
( )
'
+ Qi ,k ,
(9) (10) (11)
S i ,k = H i Pi ,k / k −1 H i' + R ,
where n = n N sin γ , γ = arc cos( 1 / n N ) ; (X, Y) are aircraft mass center coordinates, V and ϕ are aircraft velocity and heading, n N and nT are normal and tangential g-load factors (NLF and TLF), γ is roll angle; g = 9.81 is the load factor. The respective discrete-time model has the form
Proc. 1999 International Conf. on Information Fusion, Silicon Valley, CA, USA, July 1999
An Adaptive IMM Estimator for Aircraft Tracking
Emil Semerdjiev 1 Ludmila Mihaylova 1 X. Rong Li ∗
Abstract–An adaptive Interacting Multiple-Model (IMM) estimator using a small number of models is proposed for maneuvering aircraft tracking. It estimates the difference between the true target control parameter and the value currently used in the IMM models to improve the estimator’s performance. The algorithm performance is compared with the performance of a standard IMM estimator for some maneuver scenarios via Monte Carlo simulations. Key Words: target tracking, IMM, adaptive estimation