有限单元法作业非线性分析+程序
非线性有限元分析
轨道结构的非线性有限元分析姜建华 练松良摘 要 实际轨道结构受载时的力学行为,属于典型的非线性力学问题。
钢轨垫层刚度、钢轨抗扭刚度和扣件扣压力的大小是影响轨距扩大的主要因素。
根据非线性有限元接触理论,建立了能准确反映扣件、钢轨与垫层的拧紧接触,以及受载车轮与钢轨侧向滑动接触的力学计算模型;并研究计算了不同扣件压力下,由于受载车轮与钢轨侧向滑动接触引起的轨距扩大问题。
关键词 轮轨关系,扣件压力,非线性弹性力学,有限元分析1 引言实际工程中常见的非线性问题一般可以归纳为三类:材料非线性、几何非线性以及边界条件非线性。
材料非线性问题是由于材料的非线性本构关系所引起的,例如材料的弹塑性变形,材料的屈服和硬化等;几何非线性问题是由于结构的位移或变形相当大,以至必须按照变形后的几何位置来建立平衡方程;边界条件非线性问题是指边界条件随位移变化所引起的非线性问题。
通常情况下,我们所遇到的非线性问题多数是上述三类非线性问题的组合[1,2]。
实际轨道结构受载时的力学行为,属于典型的非线性力学问题。
比如基于轮轨接触的材料非线性、几何非线性及边界条件非线性问题,以及扣件、钢轨、垫层三者间相互作用时所表现的边界条件非线性行为等。
所以,机车车辆在轨道结构上行驶时引起的力学现象是相当复杂的。
以往在研究轨道各部分应力应变分布规律时,通常采用连续弹性基础梁理论或连续点支承,偶尔简单考虑扣件的作用和弹性垫层的使用。
不管用哪一种支承方式建立模型,都由于这样那样的假设而带有一定程度的近似性。
所以,如何利用现代力学理论的最新成果以及日益发展的计算机技术,根据轨道结构的具体情况,建立更为完整更为准确的轨道结构计算模型,为轨道设计部门提供更加可靠的设计依据或研究思路,已十分必要。
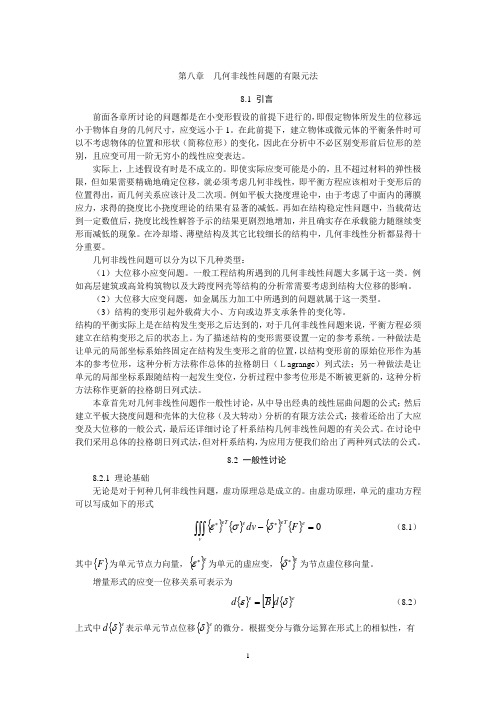
本文提出了用非线性有限元理论研究轮轨系统和轨道结构的思路。
作为算例之一,本文将根据非线性有限元理论,建立能准确反映扣件、钢轨与垫层的拧紧接触,以及受载车轮与钢轨侧向滑动接触的力学计算模型。
有限元非线性分析-正式课件-2011-01-06

屈服强度的影响因素
影响屈服强度的内在因素有:结合键、组织、结构、原子本性。 如将金属的屈服强度与陶瓷、高分子材料比较可看出结合键的影响 是根本性的。从组织结构的影响来看,可以有四种强化机制影响金 属材料的屈服强度,这就是:(1)固溶强化;(2)形变强化;(3)沉淀强 化和弥散强化;(4)晶界和亚晶强化。沉淀强化和细晶强化是工业合 金中提高材料屈服强度的最常用的手段。在这几种强化机制中,前 三种机制在提高材料强度的同时,也降低了塑性,只有细化晶粒和 亚晶,既能提高强度又能增加塑性。 影响屈服强度的外在因素有:温度、应变速率、应力状态。随 着温度的降低与应变速率的增高,材料的屈服强度升高,尤其是体心 立方金属对温度和应变速率特别敏感,这导致了钢的低温脆化。应 力状态的影响也很重要。虽然屈服强度是反映材料的内在性能的一 个本质指标,但应力状态不同,屈服强度值也不同。我们通常所说 的材料的屈服强度一般是指在单向拉伸时的屈服强度。
屈曲分析
屈曲分析 是一种用于确定结构开始变得不稳定时的临界 载荷和屈曲模态形状(结构发生屈曲响应时的特征形状)的技 术,特征值屈曲分析用于预测一个理想弹性结构的理论屈曲 强度(分叉点)。 非线性屈曲分析是一种典型而且重要的几何非线性分析, 比线性屈曲分析更精确。非线性屈曲分析的基本方法是,逐 步地施加一个恒定的载荷增量,直到解开始发散为止。尤其 重要的是,要一个足够小的载荷增量,来使载荷达到预期的 临界屈曲载荷。若载荷增量太大,则屈曲分析所得到的屈曲 载荷就可能不精确。在这种情况下,打开二分和自动时间步 长功能[ AUTOTS ,ON]有助于避免这种问题。
有限元-非线性分析
一.非线性结构分析简介 二.几何非线性(大应变、屈曲分析等) 三.材料非线性(弹塑性分析) 四.接触分析(高度非线性) 五.ANSYS的设置
第八章几何非线性问题的有限元法
第八章 几何非线性问题的有限元法8.1 引言前面各章所讨论的问题都是在小变形假设的前提下进行的,即假定物体所发生的位移远小于物体自身的几何尺寸,应变远小于1。
在此前提下,建立物体或微元体的平衡条件时可以不考虑物体的位置和形状(简称位形)的变化,因此在分析中不必区别变形前后位形的差别,且应变可用一阶无穷小的线性应变表达。
实际上,上述假设有时是不成立的。
即使实际应变可能是小的,且不超过材料的弹性极限,但如果需要精确地确定位移,就必须考虑几何非线性,即平衡方程应该相对于变形后的位置得出,而几何关系应该计及二次项。
例如平板大挠度理论中,由于考虑了中面内的薄膜应力,求得的挠度比小挠度理论的结果有显著的减低。
再如在结构稳定性问题中,当载荷达到一定数值后,挠度比线性解答予示的结果更剧烈地增加,并且确实存在承载能力随继续变形而减低的现象。
在冷却塔、薄壁结构及其它比较细长的结构中,几何非线性分析都显得十分重要。
几何非线性问题可以分为以下几种类型:(1)大位移小应变问题。
一般工程结构所遇到的几何非线性问题大多属于这一类。
例如高层建筑或高耸构筑物以及大跨度网壳等结构的分析常需要考虑到结构大位移的影响。
(2)大位移大应变问题,如金属压力加工中所遇到的问题就属于这一类型。
(3)结构的变形引起外载荷大小、方向或边界支承条件的变化等。
结构的平衡实际上是在结构发生变形之后达到的,对于几何非线性问题来说,平衡方程必须建立在结构变形之后的状态上。
为了描述结构的变形需要设置一定的参考系统。
一种做法是让单元的局部坐标系始终固定在结构发生变形之前的位置,以结构变形前的原始位形作为基本的参考位形,这种分析方法称作总体的拉格朗日(Lagrange )列式法;另一种做法是让单元的局部坐标系跟随结构一起发生变位,分析过程中参考位形是不断被更新的,这种分析方法称作更新的拉格朗日列式法。
本章首先对几何非线性问题作一般性讨论,从中导出经典的线性屈曲问题的公式;然后建立平板大挠度问题和壳体的大位移(及大转动)分析的有限方法公式;接着还给出了大应变及大位移的一般公式,最后还详细讨论了杆系结构几何非线性问题的有关公式。
非线性有限元分析1

非线性问题的类型和求解特点1 非线性问题的类型1. 1 线性分析的含义在有限元分析中的线性假设包含下列含义:即结点位移为无限小量,材料为线弹性,加载时边界条件的性质保持不变。
于是,静力平衡方程可以表示为:[]{}{}R U K = (2.1)其中,[]K 为刚度矩阵,{}R 为荷载矢量。
由于[]K 和{}R 的元素为常数,故位移响应{}U 是荷载矢量{}R 的线性函数。
也就是说,如果{}R 变为{}R α,则{}U 变为{}U α,其中,α为常数。
这就是所谓的线性有限元分析。
如果上述假设中的任何一条不能得到满足,那么就属于非线性有限元分析。
1. 2 非线性分析的必要性结构力学问题,从本质上讲都是非线性的,线性假设只是实际工程问题的一种简化。
当然,任何实际工程问题的求解都避免不了适当地简化,简化是否合理主要应根据求解效果和实际经验来判断。
对于目前工程实际中的很多问题,如地震作用下结构的弹塑性动力响应,高层建筑抗风,大跨度网壳结构动力稳定性,索膜结构找形荷载与裁减分析,大型桥梁风致振动等问题的研究,仅仅假设为线性问题是很不够的,常常需要进一步考虑为非线性问题。
因此,对各种工程结构的非线性分析就是必不可少且日趋重要了。
对于结构力学的非线性问题来说,有限单元法是最为有效的数值分析方法。
1. 3 非线性问题的类型通常,把非线性问题分为两大类,即分为几何非线性和材料非线性。
但从建立基本方程和程序设计的方便出发,又可分为三种类型:1.材料非线性:非线性效应仅由应力应变关系的非线性引起,位移分量仍假设为无限小量,故仍可采用工程应力和工程应变来描述,即仅材料为非线性。
非线性的应力应变关系是结构非线性的常见原因,许多因素都可以影响材料的应力应变性质,包括加载历史(如在弹塑性响应状况下),环境状况(如温度),加载的时间总量(如在蠕变响应状况下)等。
2.几何非线性:如果结构经受大变形,则变化了的几何形状可能会引起结构的非线性响应,这又可以分为两种情形:第一种情形,大位移小应变。
第9章 非线性问题的有限单元法
第9章非线性问题的有限单元法9.1 非线性问题概述前面章节讨论的都是线性问题,但在很多实际问题中,线弹性力学中的基本方程已不能满足,需要用非线性有限单元法。
非线性问题的基本特征是变化的结构刚度,它可以分为三大类:材料非线性、几何非线性、状态非线性。
1. 材料非线性(塑性, 超弹性, 蠕变)材料非线性指的是材料的物理定律是非线性的。
它又可分为非线性弹性问题和非线性弹塑性问题两大类。
例如在结构的形状有不连续变化(如缺口、裂纹等)的部位存在应力集中,当外载荷到达一定数值时该部位首先进入塑性,这时在该部位线弹性的应力应变关系不再适用,虽然结构的其他大部分区域仍保持弹性。
2. 几何非线性(大应变, 大挠度, 应力刚化)几何非线性是有结构变形的大位移引起的。
例如钓鱼杆,在轻微的垂向载荷作用下,会产生很大的变形。
随着垂向载荷的增加,杆不断的弯曲,以至于动力臂明显减少,结构刚度增加。
3. 状态非线性(接触, 单元死活)状态非线性是一种与状态相关的非线性行为。
例如,只承受张力的电缆的松弛与张紧;轴承与轴承套的接触与脱开;冻土的冻结与融化。
这些系统的刚度随着它们状态的变化而发生显著变化。
9.2 非线性有限元问题的求解方法对于线性方程组,由于刚度方程是常数矩阵,可以直接求解,但对于非线性方程组,由于刚度方程是某个未知量的函数则不能直接求解。
以下将简要介绍借助于重复求解线性方程组以得到非线性方程组解答的一些常用方法。
1.迭代法迭代法与直接法不同,它不是求方程组的直接解,而是用某一近似值代人,逐步迭代,使近似值逐渐逼近,当达到允许的规定误差时,就取这些近似值为方程组的解。
与直接法相比,迭代法的计算程序较简单,但迭代法耗用的机时较直接法长。
它不必存贮带宽以内的零元素,因此存贮量大大减少,且计算中舍入误差的积累也较小。
以平面问题为例,迭代法的存贮量一般只需直接法的14左右。
在求解非线性方程组时,一般采用迭代法。
2. 牛顿—拉斐逊方法ANSYS程序的方程求解器计算一系列的联立线性方程来预测工程系统的响应。
非线性有限元分析报告
非线性有限元分析1 概述在科学技术领域内,对于许多力学问题和物理问题,人们已经得到了它们所应遵循的基本方程(常微分方程或偏微分方程)和相应的定解条件(边界条件)。
但能够用解析方法求出精确解的只是少数方程性质比较简单,并且几何形状相当规则的问题。
对于大多数工程实际问题,由于方程的某些特征的非线性性质,或由于求解区域的几何形状比较复杂,则不能得到解析的答案。
这类问题的解决通常有两种途径。
一是引入简化假设,将方程和几何边界简化为能够处理的情况,从而得到问题在简化状态下的解答。
但是这种方法只是在有限的情况下是可行的,因为过多的简化可能导致误差很大甚至是错误的解答。
因此人们多年来一直在致力于寻找和发展另一种求解途径和方法——数值解法。
特别是五十多年来,随着电子计算机的飞速发展和广泛应用,数值分析方法已成为求解科学技术问题的主要工具。
已经发展的数值分析方法可以分为两大类。
一类以有限差分法为代表,主要特点是直接求解基本方程和相应定解条件的近似解。
其具体解法是将求解区域划分为网格,然后在网格的结点上用差分方程来近似微分方程,当采用较多结点时,近似解的精度可以得到改善。
但是当用于求解几何形状复杂的问题时,有限差分法的精度将降低,甚至发生困难。
另一类数值分析方法是首先建立和原问题基本方程及相应定解条件相等效的积分提法,然后再建立近似解法并求解。
如果原问题的方程具有某些特定的性质,则它的等效积分提法可以归结为某个泛函的变分,相应的近似解法实际上就是求解泛函的驻值问题。
诸如里兹法,配点法,最小二乘法,伽辽金法,力矩法等都属于这一类方法。
但此类方法也只能局限于几何形状规则的问题,原因在于它们都是在整个求解区域上假设近似函数,因此,对于几何形状复杂的问题,不可能建立合乎要求的近似函数。
1960年,R.W.CLOUGH发表了有限单元法的第一篇文献“The Finite Element Method in Plane Stress Analysis”,这同时也标志着有限单元法(FEM)的问世。
结构非线性分析的有限单元法分解
上式的泰勒展开式为
, ,
令 得 则有
K T K T ,
P
KT P 0
8
第五章 结构非线性分析的有限单元法简介
1
则方程组的迭代公式为 n KT n Pn
n1 n n
当满足收敛准则时,迭代终止。
9
第五章 结构非线性分析的有限单元法简介
图10-5 载荷增量法的几何意义
5.3 材料非线性
5.3.1 材料非线性特征
材料非线性问题可划分为以下三种类型。 (1)非线性弹性问题 (2)弹塑性问题 有限单元法求解方程的形式相同,即表现为
⑧ 作卸载计算,求出残余应力和残余应变。 ⑨ 输出计算结果。
21
第五章 结构非线性分析的有限单元法简介
5.4 几何非线性
5.4.1 几何非线性特征
几何非线性问题又可分为两大类,即大位移、小应 变问题和大位移、大应变问题。 返 回 章 节 目 录
(a) 大位移、小应变问题
(b) 大位移、大应变问题
22
20
第五章 结构非线性分析的有限单元法简介
⑤ 重新计算位移增量,进而计算单元应变增量和等 效应变增量,依次修改相应的m值。重复以上④~⑤步骤 计算过程,一般修改m值2~3次即可 ⑥ 计算位移和应力增量,并将位移、应变、应力增 量迭加到增量作用前的水平上。 ⑦ 重复④~⑥步骤计算过程,直至完成所 有的增量步。
图10-3 N—R迭代法的几何意义
图10-4 修正牛顿法迭代几何意义
7
第五章 结构非线性分析的有限单元法简介
5.2.3 载荷增量法
非线性有限元作业任务老骆整编

1.轴对称问题的弹塑性分析解析解。
厚壁筒受内压,采用Mises 屈服准则σθ−σγ=√3s(1)经计算知,当t=12.5(12.91)时,材料处于弹塑性交界面。
弹性区为:t ≤r ≤bσr=t 2σs √3b 2(b 2r 2−1) (2)σθ=t 2σs √3b 2(b 2r 2+1) (3)塑性区:a ≤r ≤tσr=3sln ra −P (4) σθ=3s(1+ln ra)−P (5)交界处有:r =t ,σre =σrpP =σs√3−t 2b +2ln ta ) (6) 最后解得残余应力为:σr r=√3sln ra−b 2P b 2−a 2(1−a 2r 2) ,a ≤r ≤t (7a) σr r =(σs t 2√3b2a 2Pb 2−a 2)(1−a 2r2) ,t ≤r ≤b (7b) σθr=3s (1+ln ra )−b 2Pb 2−a 2(1+a 2r 2) ,a ≤r ≤t (8a) σθr =(σst 2√3b2a 2P b 2−a 2)(1+a 2r2) ,a ≤r ≤t (8b)有限元网格信息图:图1 有限元网格输入数据文件内容(详细信息见附件):DATA(1)NNODE MELEM IFU IFW IPF IPR NPP NRM HAC MSF NULOAD EXPNM(1-MELEM) NNNN(1-NNODE) R ZNFU(1-IFU) FUNFW(1-IFW) FWMPQ(1-IPF) NPQ*PQNPRNRZ(1-IPR) PRNRZE EMU SSS HH UNLOAD对理想塑性材料厚壁筒,从初始状态开始,历经加载后完全卸载。
这一过程中,厚壁筒内会产生残余应力。
沿径向R的残余应力如图2-3所示。
-1.6-1.4-1.2-1-0.8-0.6-0.4-0.2101214161820R a d i a l s t r e s sRadius R图2 径向残余应力-半径曲线-15-10-55101214161820T a n g e n t i a l s t r e s sRadius R图3 切向残余应力-半径曲线图2-3中分别给出了径向残余应力和切向残余应力随半径的变化,并且和解析解进行了比较。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
几何非线性大作业荷载增量法和弧长法程序设计系(所):建筑工程系学号:********名:***培养层次:专业硕士指导老师:***2015年6月19日一、几何非线性大作业( Newton-Raphson法)用荷载增量法(Newton-Raphson法)编写几何非线性程序:(1)用平面梁单元,可分析平面杆系(2)算例:悬臂端作用弯矩。
悬臂梁最终变形形成周长为悬臂梁长度的圆。
1.1 Newton-Raphson算法基本思想图1.1 Newton-Raphson算法基本思想1.2 悬臂梁参数基本参数:L=2m, D=0.03m, A=7.069E-4m2, I=3.976E-08m4 ,E=2.0E11N/m2图1.2 悬臂梁单元信息将悬臂梁分成10个单元,如图1.2所示2.1 MATLAB输入信息材料信息单元信息约束信息(0为约束,1为放松)荷载信息(FX,FY,M)节点信息2.2 求解过程梁弯成圆形:理论弯矩M=EIY"=24981.944N.m ,直径为0.642m 运用ABAQUS和MATLAB进行求解对比:图1.3 加载图图1.4 ABAQUS变形图图1.5 MATLAB变形曲线ABAQUS和MATLAB变形对比,最终在理论荷载作用下都弯成了一个圆,其直径为0.64716m,与理论值相对比值为:(0.64716-0.642)/0.642=0.00804.非常接近。
2.3 加载点荷载位移曲线图1.5 加载点Y方向的荷载位移曲线加载点的最大竖向位移分别为1.4525m和1.45246m,相对比值(1.4525-1.45246)/1.45246=2.75395E-05。
完全相同,说明MATLAB的计算结果很好。
二、几何非线性大作业(弧长法)用弧长法编写几何非线性程序,分析荷载位移全过程曲线:1) 用平面梁单元,可分析平面杆系结构2) 算例(1)受集中荷载的拱:考察拱的矢跨比、荷载位置对荷载位移曲线的影响。
(2)其他有复杂平衡路径的结构3) 将结果与相关文献进行对比1.1 弧长法基本思想图2.1 弧长法基本思想1.2 拱基本参数拱参数:L=100m, A=0.32m2,I=1m4 ,E=1.0e7N/m2,F=-5000N,拱曲线y=5×sin(3.1415926*x/L)将拱结构分成25个单元,如图2所示图2.2 拱单元信息2.1 MATLAB输入信息材料信息单元信息约束信息(0为约束,1为放松)荷载信息(FX,FY,M)节点信息2.2 运用ANSYS和MATLAB进行求解对比(两端铰接)ANSYS中模型:图2.3 ANSYS模型图2.4 MA TLAB和ANSYS变形图2.3 加载点荷载位移曲线图2.5 加载点荷载位移曲线ANSYS求得的极限承载力3042.53,对应位移3.00142MATLAB求得的极限承载力3043.8, 对应位移3.0768相对误差分别为0.0417%,2.45%,模拟效果比较好。
2.4 拱的矢跨比a对拱荷载位移曲线的影响不同矢跨比(1/20,3/40,1/10,3/20)下加载点的荷载位移曲线1)MATLAB中计算拱的矢跨比a对拱荷载位移曲线的影响图2.6 荷载位移曲线图2.7 荷载位移曲线表1 各矢跨比下拱结构的极限荷载参数极值点F(N) 位移(m)最低点F(N) 位移(m)矢高5mm 3043.8 3.0768 1765.2 7.0816 7.5mm 7623.3 4.0335 -595.82 11.2110mm 14974 5.4026 -6408.1 14.886 20mm 39791 9.4831 -63049 30.513从表中可以初步得出:在一定随着矢跨比的增加,拱仍然呈现跳跃失稳的形式,拱结构的极限承载能力有大幅度的提高;在最低处的承载力呈现出反向,相当于有一个拉力在阻止拱结构发生跳跃失稳,矢跨比越大,拱越不容易发生跳跃失稳。
当拱的矢跨比超过一定范围后,拱将发生复杂的不同于跳跃失稳的失稳形式。
2)MATLAB与ANSYS计算结果对比图2.8 ANSYS和MA TLAB对比荷载位移曲线表2 各矢跨比下拱结构的极限荷载对比参数F(N)MAT 位移(m)F(N)ANA 位移(m)误差(%)误差(%)矢高5mm 3043.8 3.0768 3042.53 3.00142 0.04 2.45 7.5mm 7623.3 4.0335 7624.91 3.96303 -0.02 1.7510mm 14974 5.4026 14974.3 5.3157 0.00 1.61 20mm 39791 9.4831 39695.7 9.59955 0.24 -1.23从图中可以看出:矢跨比在一定范围内,MATLAB与ANSYS计算的荷载位移曲线非常吻合,验证了MATLAB程序的可行性。
当矢跨比为0.15时,ANSYS中将跟踪不到失稳后复杂的平衡路径。
从表中可以得出:MATLAB与ANSYS计算中拱的极限荷载和极限荷载时所对应的位移非常接近,加载点均为顶点26。
具体为:矢高5mm,荷载误差为0.04,位移误差为2.45;矢高7.5mm,荷载误差为-0.02,位移误差为1.75;矢高10mm,荷载误差为0,位移误差为-1.61;矢高20mm,荷载误差为0.24,位移误差为-1.23。
实际误差相差很小,在工程允许的范围内是可以接受的。
2.5 荷载位置对拱荷载位移曲线的影响图2.9 ANSYS模型简图1)MATLAB中计算荷载位置对拱荷载位移曲线的影响图2.10 各加载点荷载位移曲线表3 改变加载点拱结构的极限荷载参数极值点F(N) 位移(m)最低点F(N) 位移(m)加载点26 3043.8 3.0768 1765.2 7.081616 3570 3.1891 2258.8 6.11611 4728 2.88 3220.5 4.79594 14317 1.2826 10569 1.7829误差=100*(MATLAB-ANSYS)/ANSYS 从表中可以初步得出:随着加载点位置越靠近支座处,拱结构的极限承载能力有大幅度的提高;在最低处的承载力也大幅度提高。
当加载点位置靠近支座时,拱的承载力增加幅度最大,拱的稳定性很强,不容易发生失稳。
2)MATLAB与ANSYS计算结果对比图2.11 ANSYS和MATLAB对比荷载位移曲线表4 各加载点拱结构的极限荷载参数F(N)MAT 位移(m)F(N)ANA 位移(m)误差(%)误差(%)矢高26 3043.8 3.0768 3042.53 3.00142 0.04 2.4516 3570 3.1891 3569.73 3.24865 0.01 -1.8711 4728 2.88 4728.71 2.91862 -0.02 -1.344 14317 1.2826 14324.8 1.29764 -0.05 -1.17误差=100*(MATLAB-ANSYS)/ANSYS 从图中可以看出:MATLAB与ANSYS计算的荷载位移曲线非常吻合,验证了MATLAB程序的可行性。
从表中可以得出:MATLAB与ANSYS计算中拱的极限荷载和极限荷载时所对应的位移非常接近。
具体为:26加载点,荷载误差为0.04,位移误差为2.45;16加载点,荷载误差为0.01,位移误差为-1.87;11加载点,荷载误差为-0.02,位移误差为-1.34;4加载点,荷载误差为-0.05,位移误差为-1.17。
实际误差相差很小,在工程允许的范围内是可以接受的。
2.6 两端铰接和固接对拱荷载位移曲线的影响矢高为5mm 时,拱两端为固接和铰接时的荷载位移曲线如下:图2.12 ANSYS 和MA TLAB 固接和铰接的荷载位移曲线从图中可以看出:拱的边界条件对其的失稳形式有很大影响。
两端固接拱的稳定性明显优于两端铰接拱,承载能力也大幅度提高。
固接拱不会发生跳跃失稳的形式,刚度在初始阶段会减小,待到达一定程度后刚度又会增加。
而两端铰接拱会发生跳跃失稳的形式。
2.7 参数m 对拱失稳形式的影响文献中给出:m 是一个由拱截面在竖向平面内的回转半径r 和拱的初始矢高h 无确定的无量纲参数。
2242()Ir m h Ah==当m>=1 时,扁拱不会出现跳跃屈曲, 当0<m<1时,扁拱有可能发生跳跃屈曲,而影响扁拱是否发生跳跃屈曲的主要因素是m 值和荷载参数。
2.13 不同m值加载点的荷载位移曲线2.14 不同m值变形后拱曲线从MATLAB的计算结果中可以验证:不同的m系数对应拱不同的失稳形式。
当m>=1 时,扁拱不会出现跳跃屈曲,当0<m<1时,扁拱有可能发生跳跃屈曲。
但拱的最终变形图非常接近,只是此时拱的失稳形式变了。
2.8 具有复杂失稳形式的拱铰支圆拱该结构及其几何参数、物理性质均示于图4a 中。
中心受集中荷载。
这个结构是研究分歧问题的经典题目。
将半跨结构划分为8个单元, 得到图4b的基本路径和分歧路径, 并与JChreseielewski和Rsehmiot的结果进行了比较。
本文对此结构也进行了缺陷分析。
拱的基本参数:L=254cm,R=381cm,I=41.62cm4,A=6.45cm2,E=6898kN/cm2。
文献中的计算结果。
采用MATLAB和ANSYS对其进行求解,得到其荷载位移曲线:图2.15 ABAQUS模型图2.16 ABAQUS变形图图2.17 ANSYS、MA TLAB、ABAQUS加载点荷载位移曲线从MATLAB、ANSYS、ABAQUS计算的荷载位移曲线可以看出:两者的荷载位移曲线基本吻合。
MATLAB的计算结果可以看出在后期其承载能力会有较大提高,与文献中的荷载位移曲线趋势相同,所以验证出程序的可靠性。
ABAQUS不能模拟出后续段曲线也许是单元划分过少。
图2.18 MATLAB加载点荷载位移曲线第二次极值点会超过第一次极值点所对应的荷载,与文献一致,荷载点也接近。
加入初始缺陷:L/1000, L/2000初始缺陷后观察加载点的荷载位移曲线变化趋势。
图2.19 ANSYS加入初始缺陷后的加载点荷载位移曲线2.20 初始缺陷为0.0001时的荷载位移曲线加入初始缺陷后,拱的极限承载能力明显降低。
且失稳形式也发生了变化,初始缺陷的大小对其荷载位移曲线有明显影响。
所以在工程设计中应考虑结构或构件的初始缺陷,使结构的设计更加合理,安全。
为了研究初始缺陷对拱失稳路径的影响,应用ABAQUS和ANSYS以及MATLAB 中加水平力模拟拱结构初始缺陷下的荷载位移曲线。
为了探究ABAQUS和ANSYS计算结果,取其前三阶模态进行对比分析:2.21 一阶屈曲模态ABAQUS和MATLAB中的一阶屈曲系数为0.55884和0.564512,对应的屈曲荷载为74325.72N 和75080.096N。