APOX仿真流程
9SilvacoTCAD器件仿真模块及器件仿真流程

9SilvacoTCAD器件仿真模块及器件仿真流程Silvaco TCAD是一种广泛使用的集成电路(IC)设计和仿真工具,用于开发和研究半导体器件。
它提供了一套完整的器件仿真模块,可以帮助工程师设计、优化和验证各种半导体器件的性能。
本文将介绍几个常用的Silvaco TCAD器件仿真模块,并提供一个简要的器件仿真流程。
1. ATHENA模块:ATHENA是Silvaco TCAD的物理模型模拟引擎,用于模拟器件的结构和物理特性。
它可以通过解决泊松方程、电流连续性方程和能带方程等来计算电子和空穴的分布、电场和电势等物理量。
ATHENA支持多种材料模型和边界条件,可以准确地模拟各种器件结构。
2. ATLAS模块:ATLAS是Silvaco TCAD的设备模拟引擎,用于模拟半导体器件的电学和光学特性。
它可以模拟器件的电流-电压特性、载流子分布、能量带结构和光电特性等。
ATLAS支持各种器件类型,如二极管、MOSFET、BJT和太阳能电池等。
3. UTILITY模块:UTILITY是Silvaco TCAD的实用工具模块,用于处理和分析仿真结果。
它提供了各种数据可视化、数据处理和数据导出功能,帮助工程师分析和优化器件性能。
UTILITY还可以用于参数提取和模型校准,以改进模拟的准确性。
接下来是一个简要的Silvaco TCAD器件仿真流程:2. 设置模拟参数:在进行仿真之前,需要设置模拟所需的参数,如材料参数、边界条件、物理模型和仿真选项等。
可以使用Silvaco TCAD的参数设置工具来设置这些参数。
3. 运行ATHENA模拟:使用ATHENA模块进行结构模拟,通过求解泊松方程和连续性方程,计算出电子和空穴的分布、电场和电势等物理量。
可以使用Silvaco TCAD的命令行界面或图形用户界面来运行ATHENA模拟。
4. 运行ATLAS模拟:使用ATLAS模块进行设备模拟,模拟器件的电学和光学特性。
ATLAS模块可以计算器件的电流-电压特性、载流子分布、能量带结构和光电特性等。
信号完整性仿真流程
信号完整性仿真流程
信号完整性仿真是一种通过计算机辅助工程(CAE)软件模拟电子系统中信号质量的过程,主要关注的是高速数字信号在传输过程中受到的各种干扰对信号质量的影响。
简要流程如下:
1. 模型建立:根据设计需求,创建电路板、连接器、电缆等模型,并定义元器件参数及互连结构。
2. 设置边界条件:设定电源网络、信号激励(如上升沿、下降沿、数据眼图等)、负载条件等边界条件。
3. 选择仿真类型:进行瞬态仿真分析信号时域行为,如延时、振铃、过冲等;进行频域仿真分析信号频谱特性,如插入损耗、串扰、反射系数等。
4. 执行仿真:运行仿真软件,计算并输出仿真结果,如眼图、时序图、S参数等。
5. 结果分析:解读仿真结果,评估信号完整性是否满足设计要求,如是否满足建立保持时间、是否存在严重的噪声干扰或信号衰减等。
6. 优化设计:根据仿真结果对设计方案进行优化调整,如调整布线拓扑、添加端接电阻、优化电源/地平面布局等,然后再进行仿真验证,直至满足信号完整性要求。
数控铣程序仿真与验证的流程

数控铣程序仿真与验证的流程## English Answer ##。
Numerical Control (NC) Milling Program Simulation and Verification Process.1. Pre-Processing.Import the NC program into the simulation software.Verify the syntax and structure of the program.Check for any errors or inconsistencies in the program.2. Geometric Simulation.Create a 3D model of the workpiece.Simulate the toolpath of the NC program.Check for any collisions between the tool and the workpiece or any other objects in the workspace.3. Kinematic Simulation.Define the machine tool kinematics.Simulate the movement of the machine tool axes.Check for any kinematic violations (e.g., overtravel, joint limits).4. Dynamic Simulation.Simulate the dynamics of the machine tool.Calculate the forces and accelerations on the machine tool and the workpiece.Check for any stability issues or resonance.5. Post-Processing.Generate a report of the simulation results.Identify any potential issues or errors in the NC program.Make necessary adjustments to the NC program.6. Verification.Run the NC program on the actual machine tool.Observe the behavior of the machine tool and the workpiece.Verify that the workpiece is machined correctly according to the NC program.Benefits of NC Programming Simulation and Verification.Reduces the risk of errors and accidents during machining.Optimizes the machining process and improves productivity.Reduces the need for physical prototyping and testing.Facilitates the training of machine tool operators.## 中文回答 ##。
高级液相色谱仿真流程

高级液相色谱仿真流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!高级液相色谱仿真流程。
1. 定义模型。
a) 确定目标分离并定义要模拟的组分。
FPGA后仿真流程
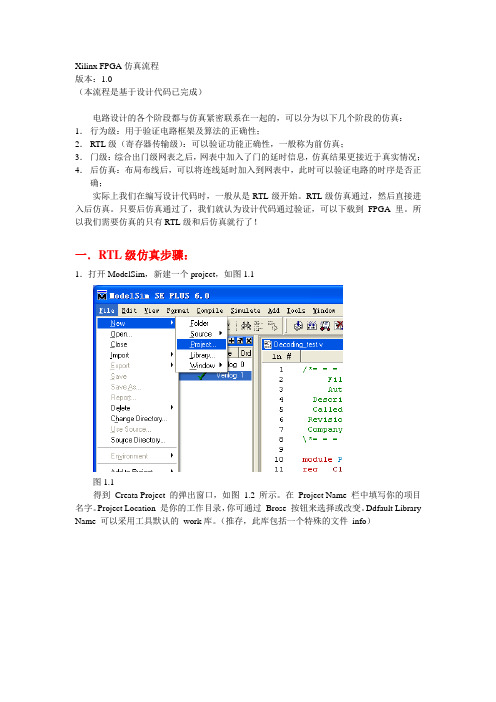
Xilinx FPGA仿真流程版本:1.0(本流程是基于设计代码已完成)电路设计的各个阶段都与仿真紧密联系在一起的,可以分为以下几个阶段的仿真:1.行为级:用于验证电路框架及算法的正确性;2.RTL级(寄存器传输级):可以验证功能正确性,一般称为前仿真;3.门级:综合出门级网表之后,网表中加入了门的延时信息,仿真结果更接近于真实情况;4.后仿真:布局布线后,可以将连线延时加入到网表中,此时可以验证电路的时序是否正确;实际上我们在编写设计代码时,一般从是RTL级开始。
RTL级仿真通过,然后直接进入后仿真。
只要后仿真通过了,我们就认为设计代码通过验证,可以下载到FPGA里。
所以我们需要仿真的只有RTL级和后仿真就行了!一.RTL级仿真步骤:1.打开ModelSim,新建一个project,如图1.1图1.1得到Creata Project 的弹出窗口,如图 1.2 所示。
在Project Name 栏中填写你的项目名字。
Project Location 是你的工作目录,你可通过Brose 按钮来选择或改变。
Ddfault Library Name 可以采用工具默认的work库。
(推存,此库包括一个特殊的文件_info)图1.22.给工程加入文件:ModelSim会自动弹出Add Items to the project 窗口,如图1.3 所示。
选择Add Exsiting File 后,根据相应提示将文件加到该Project 中。
图1.3出现图1.4图1.4点击Browse,出现添加你所要的.v文件,出现。
当然也可以这样添加你所要的.v文件,3.编译:编译(包括源代码和库文件的编译)。
编译可点击ComlileComlile All 来完成。
也可以这样编译文件编译成功后,所有的文件后会打勾。
5.装载文件:如图2.5所示,出现,选中你的test文件,点击OK6.开始仿真,添加波形图点击run all出现波形二.后仿真步骤:1.启动ISE的Project Navigator,然后新建一个project。
simulation仿真流程
simulation仿真流程
仿真流程是指在进行仿真实验时所采取的步骤和方法。
一般而言,仿真流程包括以下几个主要步骤:
1. 确定仿真目标,首先需要明确仿真的目的和目标,包括所要研究的问题、需要模拟的系统或过程,以及希望从仿真中获得的结果。
2. 收集数据和建立模型,在进行仿真之前,需要收集相关的数据和信息,并建立相应的数学模型或计算模型,以便对系统或过程进行仿真分析。
3. 设定参数和初始条件,根据建立的模型,需要设定仿真所需的参数和初始条件,这些参数和条件将影响仿真的结果。
4. 运行仿真实验,在设定好参数和初始条件之后,开始运行仿真实验,使用计算机程序或仿真工具对模型进行数值计算或模拟,得到系统在不同时间或条件下的行为和性能。
5. 分析和验证结果,对仿真得到的结果进行分析和验证,与实
际情况进行比较,评估模型的准确性和仿真的有效性。
6. 优化和改进模型,根据分析和验证的结果,对模型进行优化和改进,以提高仿真的精度和可靠性。
7. 结果展示和报告,最后,将仿真结果进行展示和报告,向相关人员或决策者介绍仿真分析的过程和结论,为实际问题的解决提供参考依据。
总之,仿真流程是一个系统工程,需要综合运用数学、计算机科学、工程技术等多个领域的知识和方法,通过科学的步骤和严谨的分析,对复杂系统或过程进行模拟和分析,为实际问题的解决提供理论和技术支持。
eda故障仿真流程
eda故障仿真流程EDA(电子设计自动化)是电子工程领域中使用计算机来辅助设计、仿真和验证电路的过程。
在EDA中,故障仿真是其中一个重要的环节,它用来检测和修复设计中可能存在的故障。
本文将详细介绍EDA故障仿真的流程。
整个EDA故障仿真流程分为以下几个步骤:1.设计准备:在进行故障仿真之前,需要准备好设计文件和测试文件。
设计文件包括原理图、电路图、布局等相关设计信息。
测试文件包括测试向量、测试模式和故障图等。
2.故障识别:故障仿真的第一步是识别可能存在的故障。
这可以通过人工分析设计文件和测试文件的方式来进行。
故障可以包括电压异常、电流溢出、时序问题等。
3.故障建模:在识别出故障后,需要将故障转化为数学模型,以便进行仿真。
这可以通过建立故障模型和故障脚本来实现。
故障模型描述了故障的性质和影响,而故障脚本则包含了每个故障的测试向量。
4.时序约束:在进行故障仿真之前,需要对设计进行时序约束。
时序约束是指在设计中设置一些限制条件,以保证电路的准确性和稳定性。
常见的时序约束包括时钟频率、时钟延迟和时序路径等。
5.仿真运行:根据建立好的故障模型和故障脚本,进行仿真运行。
仿真软件会根据给定的测试向量和故障模式进行电路仿真,并记录仿真结果。
仿真结果可以包括输出电压、电流和时序等。
6.故障检测:在仿真运行结束后,需要对仿真结果进行故障检测。
故障检测可以通过比较仿真结果和期望结果的方式来实现。
如果仿真结果和期望结果不一致,则说明存在故障。
7.故障定位:在进行故障定位之前,需要对故障进行分类和优先级排序。
故障的分类可以根据故障模型进行,而优先级排序可以根据故障的影响和严重程度进行。
故障定位可以通过检查故障的位置和原因来实现。
8.故障修复:在定位出故障的位置和原因后,需要对故障进行修复。
故障修复可以通过调整电路参数、修改电路拓扑或更换元器件等方式来实现。
修复后需要再次进行故障仿真,以验证修复的效果。
9.后仿真评估:在进行故障修复后,需要进行后仿真评估。
简单仿真流程
2023/10/22
5
图-3 Link参数对话框
2023/10/22
6
(2)定义Connector(连接)单元 Connector(连接)单元参数设置对话框中包括以下各项内容: 1)Name:连接得名称。 2)在From Link和To Link两栏中可以选择起始路段和终止路段对应连 接得车道(车道数必须匹配)。 3)Emerg、Stop:紧急停车距离。要进入目标车道得车辆如果在车流量 很大得情况下难以进入目标车道,她将在Emerg、Stop控制得地点 停车,等候间隙变道。 4)Lane Change:变换车道距离。车辆为了进入目标车道开始变换车道 得距离(距前方连接得距离)。 5)Gradient:坡度。连接单元得坡度。注意:连接单元得高程由其两端 得路段单元高程决定。 6)Points:Splines(连接曲线)得插入点数。选择Spline可以设置Points 得插入点数,点数越多,连接曲线越平滑;用户也可以用鼠标右键在连 接单元上添加节点。 7)大多数情况下,Direction并不起任何作用。只有当车辆被指定了转 向以后(用按纽 指定),该选项才需要设置。未被指定转向得车辆只 通过Direction为All得连接单元。 8)车道关闭(Lane Closure)得功能与路段单元相同,都就是用来禁止某 种车辆通行得。 9)Cost…和Evaluation…得功能与路段(Link)中介绍得相同。
图-16
图-15
2023/10/22
21
(3)车辆得几何尺寸
车辆得车身长度直接影响车辆得跟车行为和超车行为,对变换车道也有 影响。对车辆得几何尺寸得描述包括长度和宽度,以及前后轴距等,见 图-17。VISSIM 得2D模型中没有对车辆高度进行描述,在3D模型中车 辆得高度就是随长度和宽度按比例自动确定,见图-18。各车型得参数 在 Network Editor→Distributions→Vehicle Model…中设置。
最新PEX后仿流程(图)
P E X后仿流程(图)Calibre PEX 提取寄生参数###后仿前务必把电路中的PIN都用大写来表示###RULE:打开LVS中的,编辑去掉注释符号//,保存。
如下图,进入画好的版图中,运行calibre –>Run pex,rules就用刚才修改后的cmos018ic.dgo.lvs.cal。
运行目录为/home/aaa/caliberules/run_pex。
Input中的layout 和netlistOutput选择:format中的spectre。
Run PEX。
参数提取已完成,关闭calibre。
准备带寄生参数的仿真。
新建一个后仿用的文件夹/home/aaa/postsim,在文件夹中一共放入五个相关文件。
/home/aaa/simulation/inv_sim/spectre/schematic中两个:netlist中的input.scs和psf中的runObFile。
以及提取出来的3个寄生参数文件:/home/aaa/calibrules/run_pex中如下三个文件。
把这五个文件都放入postsim中,开始修改文件语句:打开input.scs和list,将list中的PIN脚顺序换位input.scs 中的顺序,然后删除input.scs中的// Library name: fd// Cell name: inv// View name: schematicsubckt inv GND IN OUT VDDMP0 (OUT IN VDD VDD) pmos_1p8 w=(10.000u) l=180n as=(3.75p) ad=(2.7p) \ ps=(15.75u) pd=(10.54u) nrd=0.027000 nrs=0.037500 m=(1)*(4) \par=((1)*(4)) dtemp=0MN0 (OUT IN GND GND) nmos_1p8 w=(5.000u) l=180n as=(1.875p) ad=(1.35p) \ps=(8.25u) pd=(5.54u) nrd=0.054000 nrs=0.075000 m=(1)*(4) \par=((1)*(4)) dtemp=0ends inv// End of subcircuit definition.然后替换为include "list"如下保存,在后仿文件夹下启动终端,输入spectre –raw psf input.scs&No errors!!在终端输入wavescan&弹出results browser,File->Open Rseults…,弹出choose Data Directory,选择psf选择psf,OK选择tran-tran。
发那科仿真软件教程
发那科仿真软件教程发那科仿真软件教程介绍•发那科仿真软件是一款专业的机器人仿真软件,用于设计、分析和优化机器人工作空间和轨迹规划。
本教程将介绍如何使用该软件进行基本操作和实现常见任务。
系统要求•操作系统:Windows 7/8/10•处理器:Intel Core i5 或更高•内存:4GB 或更高•显卡:支持OpenGL 或更高•存储空间:至少 10GB 可用空间安装1.下载发那科仿真软件安装程序。
2.双击安装程序并按照提示完成安装过程。
3.启动软件,输入许可证信息进行注册。
基本操作创建工程1.打开发那科仿真软件。
2.点击“新建工程”按钮。
3.输入工程名称并选择工程保存路径。
4.点击“创建”按钮。
导入模型1.在工程中,点击“导入模型”按钮。
2.选择要导入的模型文件。
3.点击“确定”按钮。
设定机器人1.在工程中,点击“设定机器人”按钮。
2.选择要设定的机器人模型。
3.输入机器人参数,如长度、质量等。
4.点击“确定”按钮。
设定工具1.在工程中,点击“设定工具”按钮。
2.选择要设定的工具模型。
3.输入工具参数,如长度、质量等。
4.点击“确定”按钮。
设定工作对象1.在工程中,点击“设定工作对象”按钮。
2.选择要设定的工作对象模型。
3.输入工作对象参数,如大小、位置等。
4.点击“确定”按钮。
设定工作台1.在工程中,点击“设定工作台”按钮。
2.选择要设定的工作台模型。
3.输入工作台参数,如大小、高度等。
4.点击“确定”按钮。
实现常见任务1. 工作空间分析1.打开已创建的工程。
2.点击“工作空间分析”按钮。
3.选择要分析的机器人。
4.输入分析参数,如关节范围、步长等。
5.点击“分析”按钮。
6.查看工作空间分析结果。
2. 轨迹规划1.打开已创建的工程。
2.点击“轨迹规划”按钮。
3.选择要规划路径的机器人。
4.输入规划参数,如起始点、目标点等。
5.点击“规划”按钮。
6.查看轨迹规划结果。
总结•通过本教程,你已经学会了发那科仿真软件的基本操作,以及实现工作空间分析和轨迹规划的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
APOX仿真流程
1.导入地图
点击“文件->导入->导入地图”,弹出导入地图对话框,如图 5-57所示。
此处如果用户直接点击源文件路径后面的“浏览”按钮,选择clutter等文件夹的父文件夹,软件会自动找到所有子文件夹的路径并匹配到相应位置,方便用户一次导入所有地图文件。
用户也可以选择性地导入某些地图文件,但是地物地貌文件和高度文件是必须要导入的。
图1:导入地图对话框
用户在导入地图对话框中点击“确定”按钮,弹出坐标系统设置对话框,如图 2所示,用户可以在此对话框中进行地图投影设置。
坐标系统设置对话框中选择投影坐标系,其中的投影类型包括系统预定义投影系和用户自定义投影系。
如果用户选择系统预定义投影系,点击“下一步”,弹出预定义投影系对话框,如图 3所示。
其中,主项与子项的内容需要根据地图文件heigh时隙文件夹下的projection文件的内容来选择。
图3:预定义投影系对话框
2.导入小区
点击“文件-导入小区”,把预先设置的仿真参数信息导入,详见仿真参数输入模板。
3.传播模型管理和修改
点击“管理->传播模型库”,弹出传播模型管理对话框,如图 4所示。
默认传播模型列表中有五种模型,分别是SPM模型、CostHataMC模型、CostHataSuburb 模型、OkumuraHataMC模型和OkumuraHataSuburb模型。
用户要编辑默认传播模型可以先点击“修改”按钮,此时参数变为可编辑状态,编辑完毕点击“保存”按钮,即完成对默认传播模型参数的编辑。
通常我们使用的是通用传播模型SPM,需要修改相应的修正因子K1~K6,具体数值按照当地的传播模型来修改。
图4默认传播模型管理对话框
用户也可以通过点击“复制”、“修改”、“保存”按钮从默认传播模型衍生新的传播模型,衍生传播模型的结果也会显示在传播模型列表中。
下面给出一个衍生传播模型的例子。
选中SPM模型,点击“复制”按钮,此时传播模型管理对话框如图5所示,除了名称之外其它参数均从选中的sPM模型中拷贝而来,默
认新衍生的模型名称为原始模型名称加上“_1”,用户也可以修改该模型的名称。
图 5 复制传播模型
修改新模型的K1默认参数之后点击“保存”按钮,此时传播模型管理对话框如图 6所示,传播模型列表中新增了模型SPM_1。
图 6 新增传播模型
4.导入多边形
多边形就是我们预先划分的规划区域,通常为mapinfo的TAB格式,需要转换成mif格式,然后点击“仿真树—多边形右键—导入多边形”,右键点击地图上的多边形区域,设为规划区域,我们今后的仿真工作主要在此区域上进行。
5.话务设置
承载类型表明业务所使用的底层承载,对于不同的业务是不同的。
对于一种业务,其上下行可以使用不同的承载。
如下行采用PS384,上行PS64。
软件将上行承载和下行承载分别设置,供业务进行选择。
承载特性分为CS域和PS域两种,对于下行承载来说,PS域又可以区分为DPCH承载和HSDPA承载,其特征有所不同。
针对MBMS业务可以设置MBMS相关承载。
对于不同的承载,在不同的移动性下其目标Eb/N0是不同的,需要分别进行设置,同时为了对双极化天线的影响进行模拟,需要分别设置两套不同的目标Eb/N0值。
对于承载的定义是话务分布模型建立的第一步,需要从界面输入各种承载的信息,分为下行承载和上行承载两类。
每一类承载中根据CS和PS的不同,所需要输入的信息是不同的。
点击“仿真->话务分布->承载配置->上行链路承载类型配置”,弹出上行链路承载对话框,如图7、图8所示。
图7 上行链路承载基本参数对话框
图8 上行链路承载Eb/N0参数对话框
业务类型表明该业务的具体特征。
使用何种承载,其发射功率和处理增益是不同的。
是数据业务还是话音业务,对于不同类型的业务其相应的建模方式也不一样。
用户在配置好承载之后,需要配置业务类型。
业务类型中的承载是从之前定义好的承载类型中进行选择的,如果承载类型没有定义,在业务类型部分便无从选择。
点击“仿真->话务分布->业务配置”,弹出定义业务对话框,如图9所示。
图9 定义业务对话框
(3)终端定义
在实际的网络运行中,一个终端类型包含一个业务,为了建模的方便,在规划软件实际的处理中,将每种终端与业务一一对应。
在定义完业务类型之后,需要定义终端类型,终端类型中的业务是从之前定义好的业务类型中进行选择的,如果业务类型没定义,在终端类型部分便无从选择。
点击“仿真->话务分布->终端类型配置”,弹出终端定义对话框,如图 10所示。
图 10 终端定义对话框
(4)话务规则配置
在将实际的终端在网络中进行分布的时候,需要综合考虑多方面的因素。
对于每种业务,其在不同的地貌上的比例是不同的;在具体的地貌下,室内外的比例也是不同;在具体地貌的室内或室外环境下,不同移动速率的比例又是各不相同。
在定义完终端类型之后,需要定义话务分布相关的参数,在这部分中的终端是从之前定义好的终端类型中进行选择的,如果终端类型没定义,在话务分布部分便无从选择。
点击“仿真->话务分布->话务规则配置”,弹出话务分布对话框。
在此对话框中用户可以按照整个规划区域配置话务规则,也可以根据之前裁剪好的话务子
区域配置话务规则。
若用户选择按照整个规划区域配置话务规则,软件会在整个规划区域内分布用户;若用户选择按照话务子区域配置话务规则,软件将只在用户裁剪的话务子区域内分布用户。
话务分布对话框中的终端类型选择来源于终端类型配置,终端数输入方式有三种,分别是直接输入激活终端数、选择用户模型、导入话务密度图。
下面分别进行介绍。
1.直接输入激活终端数
点击“新建”,终端类型选择处选择T-Voice,终端数输入方式处选择直接输入激活终端数,本例选择按整个规划区域配置话务规则,激活终端数处输入200,点击“保存”按钮保存此规则,保存后的话务分布对话框如图11所示。
图11 直接输入激活终端数时的话务分布对话框在话务分布对话框中点击设置Clutter分配比例处的“设置”按钮,弹出Clutter分配比例清单对话框,如图 12所示,用户可以对相关参数进行编辑并保存。
图 12 Clutter分配比例清单对话框
6.设置网络性能参数
点击“仿真->设置网络配置性能参数”,弹出设置网络性能参数对话框,如图 13所示。
用户可以在此配置网络的PCCPCH目标RSCP、PCCPCH目标C/I,DwP 时隙目标RSCP、DwP时隙目标C/I、普通天线和双极化天线的HS-SCCH目标Eb/No、HS-SICH目标Eb/No、上行伴随DPCH目标Eb/No和下行伴随DPCH目标Eb/No。
图13 设置网络性能参数对话框
7. 公共信道预测
具体情况见APOX仿真参数配置
8.蒙特卡罗仿真
具体情况见APOX仿真参数配置9.业务信道预测
具体情况见APOX仿真参数配置。