仿真操作流程
仿真操作流程范文
仿真操作流程范文一、准备工作在进行仿真操作之前,需要进行一些准备工作,确保设备和环境的正常运行。
首先,检查仿真设备是否完好,并查看是否有任何故障或损坏。
然后,确认仿真软件是否已正确安装并更新至最新版本。
最后,检查仿真环境是否安全,移除任何可能导致意外的障碍物。
二、启动设备和软件在准备工作完成后,需要启动仿真设备和软件。
按照设备说明书和软件操作指南的要求,正确启动设备并登录仿真软件。
同时,确保设备与仿真软件的连接稳定,以便正常进行操作。
三、选择场景和设定参数仿真软件通常提供多个场景供用户选择,每个场景都具有不同的操作难度和目标。
根据自己的需求和实际情况,选择合适的场景。
在选择场景之后,还需要设定一些操作参数,比如时间限制、物品数量等。
根据要求和目标,合理设定参数,以增加操作的挑战性和真实感。
四、学习和熟悉操作方法在正式进行操作之前,需要学习和熟悉操作方法。
通过阅读操作手册、观看教学视频或参加培训课程,了解设备和软件的操作步骤和技巧。
同时,还应该尽量模拟实际操作的场景和环境,以提高操作的真实性和准确性。
五、开始仿真操作当准备工作和学习阶段完成后,就可以开始进行仿真操作了。
根据设备和软件的要求,按照预定的操作步骤进行操作。
在操作过程中,应该密切注意设备显示的信息和指示,及时调整和纠正操作。
同时,还需要确保操作的准确性和安全性,以避免造成不必要的损失或危险。
六、评估和反馈在完成仿真操作之后,可以对操作过程进行评估和反馈。
通过对比仿真结果和目标要求,分析操作的准确性和效果。
同时,还可以查看系统提供的评分和评价,了解自己的操作水平和改进空间。
在评估和反馈的基础上,可以总结经验和教训,提高自己的操作技能和经验。
数控仿真操作步骤
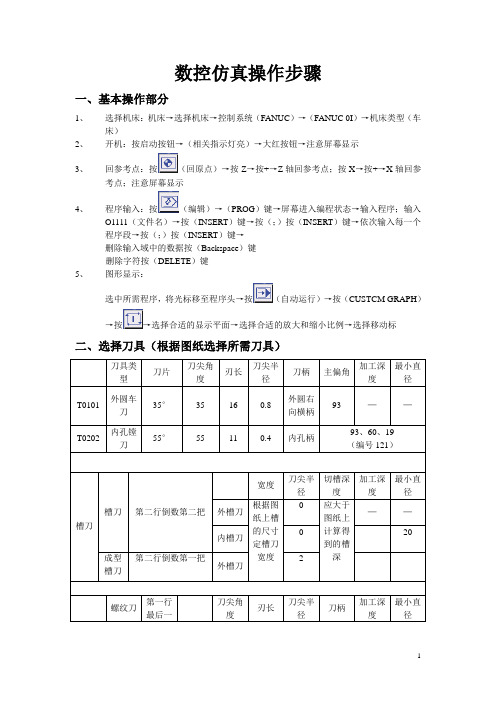
数控仿真操作步骤一、基本操作部分1、选择机床:机床→选择机床→控制系统(FANUC)→(FANUC 0I)→机床类型(车床)2、开机:按启动按钮→(相关指示灯亮)→大红按钮→注意屏幕显示3、回参考点:按(回原点)→按Z→按+→Z轴回参考点;按X→按+→X轴回参考点;注意屏幕显示4、程序输入:按(编辑)→(PROG)键→屏幕进入编程状态→输入程序;输入O1111(文件名)→按(INSERT)键→按(;)按(INSERT)键→依次输入每一个程序段→按(;)按(INSERT)键→删除输入域中的数据按(Backspace)键删除字符按(DELETE)键5、图形显示:选中所需程序,将光标移至程序头→按(自动运行)→按(CUSTCM GRAPH)→按→选择合适的显示平面→选择合适的放大和缩小比例→选择移动标二、选择刀具(根据图纸选择所需刀具)刀具类型刀片刀尖角度刃长刀尖半径刀柄主偏角加工深度最小直径T0101 外圆车刀35°35160.8外圆右向横柄93──T0202 内孔镗刀55°55110.4内孔柄93、60、19(编号121)槽刀槽刀第二行倒数第二把宽度刀尖半径切槽深度加工深度最小直径外槽刀根据图纸上槽的尺寸定槽刀宽度0 应大于图纸上计算得到的槽深──内槽刀0 20成型槽刀第二行倒数第一把外槽刀2螺纹刀第一行最后一刀尖角度刃长刀尖半径刀柄加工深度最小直径把外圆螺纹刀60110外螺纹柄内孔螺纹刀6070内螺纹柄20三、编写程序1、零件的每一边写在一个程序内,一共两个程序(O0001、O0002)2、编程顺序:每一边都是从外到内编写,先轮廓、再槽、再螺纹3、程序中的刀号要与上述所选刀具号一至4、程序中除了G73 U10. R10中的R不加点外,X、Y、Z、R、U、W字母后面都要加点5、一般情况中编制加工轨迹时直径方向用X表示,其值为正。
轴线方向用Z 表示,其值为负。
四、检查程序1、通过查看轨迹检查程序是否正确2、检查中出现的问题要学会查找,并修改3、修改完成后,按‘RESET’复位键,再从新轨迹检查4、一定要检查清楚,要保证轨迹正确才能做下一步的工作。
【干货】PDPS软件:机器人工作站工艺仿真操作流程
【⼲货】PDPS软件:机器⼈⼯作站⼯艺仿真操作流程前⾔PDPS是Process Designer & Process Simulate的简称,它们同是西门⼦公司Tecnomatix下的产品。
PD(Process Designer的简称),它的主要功能是数据管理与⼯艺规划;PS(Process Simulate的简称),它的主要功能是实现仿真验证与离线编程。
仿真操作时,⼆者需要协同配合共同完成仿真任务。
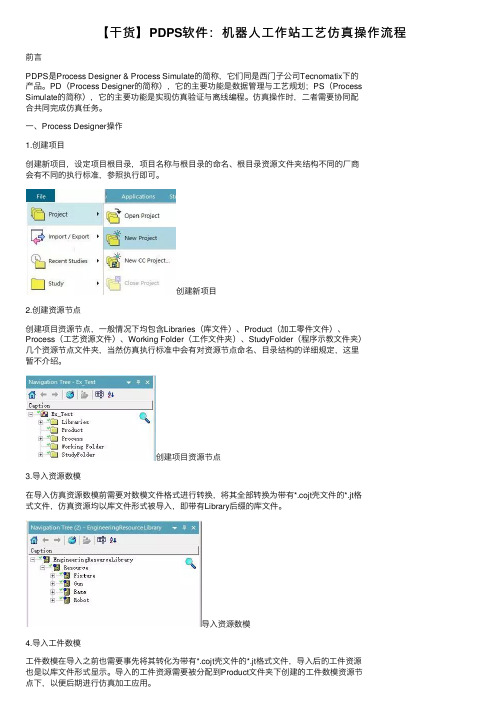
⼀、Process Designer操作1.创建项⽬创建新项⽬,设定项⽬根⽬录,项⽬名称与根⽬录的命名、根⽬录资源⽂件夹结构不同的⼚商会有不同的执⾏标准,参照执⾏即可。
创建新项⽬2.创建资源节点创建项⽬资源节点,⼀般情况下均包含Libraries(库⽂件)、Product(加⼯零件⽂件)、Process(⼯艺资源⽂件)、Working Folder(⼯作⽂件夹)、StudyFolder(程序⽰教⽂件夹)⼏个资源节点⽂件夹,当然仿真执⾏标准中会有对资源节点命名、⽬录结构的详细规定,这⾥暂不介绍。
创建项⽬资源节点3.导⼊资源数模在导⼊仿真资源数模前需要对数模⽂件格式进⾏转换,将其全部转换为带有*.cojt壳⽂件的*.jt格式⽂件,仿真资源均以库⽂件形式被导⼊,即带有Library后缀的库⽂件。
导⼊资源数模4.导⼊⼯件数模⼯件数模在导⼊之前也需要事先将其转化为带有*.cojt壳⽂件的*.jt格式⽂件,导⼊后的⼯件资源也是以库⽂件形式显⽰。
导⼊的⼯件资源需要被分配到Product⽂件夹下创建的⼯件数模资源节点下,以便后期进⾏仿真加⼯应⽤。
导⼊⼯件数模5.导⼊焊点数据PD中机器⼈焊点信息通常需要从外部导⼊,⽀持导⼊的数据⽂件格式包括:*.xml、*.ppd、*.csv。
其中,*.csv格式机器⼈焊点⽂件制作⽅法之前为⼤家介绍过了,这⾥不再赘述。
导⼊的机器⼈焊点数据同样以库⽂件形式显⽰,使⽤是需要将其投影到焊接板件上。
PSPICE仿真流程

PSPICE仿真流程展开全文采用HSPICE 软件可以在直流到高于100MHz 的微波频率范围内对电路作精确的仿真、分析和优化。
在实际应用中,HSPICE能提供关键性的电路模拟和设计方案,并且应用HSPICE进行电路模拟时,其电路规模仅取决于用户计算机的实际存储器容量。
二、新建设计工程在对应的界面下打开新建工程:2)在出现的页面中要注意对应的选择3)在进行对应的选择后进入仿真电路的设计:将生成的对应的库放置在CADENCE常用的目录中,在仿真电路的工程中放置对应的库文件。
这个地方要注意放置的.olb库应该是 PSPICE文件夹下面对应的文件,在该文件的上层中library中的.olb中的文件是不能进行仿真的,因为这些元件只有.olb,而无网表.lib。
4)放置对应的元件:对于项目设计中用到的有源器件,需要按照上面的操作方式放置对应的器件,对于电容,电阻电感等分离器件,可以在libraries中选中所有的库,然后在滤波器中键入对应的元件就可以选中对应的器件,点击后进行放置。
对分离元件的修改直接在对应的元件上面进行修改:电阻的单位分别为:k m;电容的单位分别为:P n u ;电感的单位分别为:n 及上面的单位只写量级不写单位。
5)放置对应的激励源:在LIBRARIES中选中所有的库,然后键入S就可以选中以S开头的库。
然后在对应的库中选中需要的激励源。
激励源有两种一种是自己进行编辑、手工绘制的这个对应在库中选择:另外一种是不需要自己进行编辑:该参数的修改可以直接的在需要修改的数值上面就行修改,也可以选定电源然后点击右键后进行对应的修改。
6)放置地符号:地符号就是在对应的source里面选择0的对应的标号。
7)直流电源的放置:电源的选择里面应该注意到选择source 然后再选定VDC或者是其它的对应的参考。
8)放置探头:点击对应的探头放置在感兴趣的位置处。
6 对仿真进行配置:1)对放置的项目的名称进行设置,也就是设置仿真的名称。
DCS控制系统仿真操作步骤

(考核常规控制方案的序号、注释、控制方案设置是否正确)
9.正确组态每个常规控制方案。(2分)
(考核每个常规控制方案的回路位号、回路注释、回路输入、输出位号设置是否正确,每一项算作一处考核点)
10.正确启动二次计算。(0.5分)
11.正确进行数据分组和分区设置。(2分)
37.在规定操作小组下做自定义键。(0.5分)
38.正确设置自定义键。(2分)
(考核自定义键的键号、键描述、键定义语句是否正确,一个自定义键算作一个考核点)
四、项目编译3分
1.项目最后正确编译。(3分)
2.运行检查
五、安全文明操作4分
安全文明操作,保持安静和整洁
(考核位号、动态数据、方框、信号线绘制是否符合试题要求)
•管道绘制正确(5分)
•标注绘制正确(2分)
•箭头绘制正确(2分)
(考核箭头位置、方向是否符合试题要求)
28.流程图绘制美观。(3分)
29.在规定操作小组下做报表画面。(0.5分)
30.报表页标题、文件名称、关联正确。(0.5分)
31.报表格式正确。(0.5分)
19.在规定操作小组下做数据一览画面。(0.5分)
20.正确按照试题要求设置页码和页标题。(0.5分)
(考核页码页标题设置顺序,匹配是否正确,是否缺页多页)
21.正确设置数据一览画面。(3分)
(考核位号设置是否正确,位号算作一处考核点,多做少做均算错)
22.在规定操作小组下做趋势画面。(0.5分)
23.正确按照试题要求设置页码和页标题。(0.5分)
(考核每个数据组和数据区是否设置正确)
12.正确组态光字牌。(2分)
仿真工作流程介绍
仿真工作流程介绍仿真工作流程是一种通过利用计算机模型、软件工具等技术手段来模拟现实世界中的复杂系统、过程或现象的方法。
它可以帮助人们理解和预测系统的行为,并在实际操作中指导决策和优化。
仿真工作流程一般包括建模、验证、分析和优化等几个主要步骤。
第一步是建模,建模是仿真工作的第一步,也是最关键的一步。
建模的目的是将现实世界的系统或过程抽象为计算机可以处理的模型。
建模可以通过使用数学方程、物理规律、统计数据等方法来描述系统的特征和行为。
建模的种类包括离散事件仿真、连续系统仿真、代理模型等。
在建模过程中,可以使用各种工具和技术,如Matlab、Simulink、AnyLogic等。
第二步是验证,验证是对建立的模型进行验证和验证的过程。
验证的目的是确保模型的准确性和正确性。
验证可以通过与现实世界的数据进行比较,分析模型的输出和实际结果的一致性来完成。
验证的方法包括参数估计、回归分析、敏感性分析等。
第三步是分析,分析是对模型进行分析和评估的过程。
分析的目的是了解系统的行为和性能,并从中提取有价值的信息。
分析可以通过观察模型的输出、生成统计数据、绘制图表等方法来完成。
分析的工具和技术包括统计分析、数据挖掘、可视化等。
第四步是优化,优化是为了改进系统的性能和效率而对模型进行的调整和改进。
优化的目标可以是最大化效益、最小化成本、最小化风险等。
优化可以通过调整模型的参数、结构或算法来实现。
优化的方法包括模拟退火、遗传算法、粒子群算法等。
在整个仿真工作流程中,还需要不断的循环迭代,根据分析和优化的结果来调整和改进模型,以逐步提高模型的准确性和可靠性。
此外,还需要对模拟的过程和结果进行文档记录和报告,以便于审查和交流。
综上所述,仿真工作流程是一个系统性的过程,包括建模、验证、分析和优化等几个主要步骤。
通过仿真,人们可以更好地理解和预测现实世界中的复杂系统和过程,并在实际应用中指导决策和优化。
仿真工作流程是一个动态的过程,需要不断地迭代和改进。
protues如何进行仿真操作

方法/步骤
第二步:在弹出的窗口中,选择“执 行”轿改选项。特兼耻
方法/步骤
第三步:即可在露常绘图区看到我们 的仿真结果。
参考资料:玩转机器人:基于Proteus的电路原理仿真(移动视频版)
《玩转机器人:基于Proteus的电路原理仿真(移动视频版)》是2020年电子工业出版社出版的 图书,作者是刘波。
protues如何进行仿真操作?
参考资料:基于Proteus仿真的单片机技能应用
《基于Proteus仿真的单片机技能应用》是2014年3月电子工业出版社出版的图书,作者是金杰、 郭宝生。
内容介绍
protues如何进行仿真操作?
方法/步骤
第一步:在我们的protues软件菜单 栏的上方点击“调试”按钮。
参考资料:零起点学Proteus单片机仿真技术
《零起点学Proteus单片机仿真技术》是2012年机械工业出版社出版的图书,作者是范海绍 。
参考资料:Proteus教程——电子线路设计、制版与仿真
《Proteus教程——电子线路设计、制版与仿真》是2008年9月清华大学出版社出版的图书,作 者是朱清慧、张凤蕊、翟天嵩等。
参考资料:基于PROTEUS电路及单片机仿真教程
《基于PROTEUS电路及单片机仿真教程》是2013年西安电子科技大学出版社出版的图书,作者是 熊建平、马鲁娟、李益民。
感谢观看
参考资料:基于PROTEUS 的单片机系统设计与仿真实例
《基于PROTEUS的单片机系统设计与仿真实例》是 2012年出版的图书,作者是蒋辉平、周国雄。
参考资料:Proteus教程:电子线路设计、制版与仿真
《Proteus教程:电子线路设计、制版与仿真》,是清华大学出版社2011年6月1日出版的图书, 作者是朱清慧。
MW火电厂仿真运行操作流程

MW火电厂仿真运行操作流程火力发电是目前中国主要的发电方式之一,其运行操作流程的顺序和方法对于保证电厂的安全稳定运行具有重要意义。
下面是一个MW火电厂仿真运行操作流程的简要介绍。
1.运行前准备阶段:-将各设备恢复到正常运行条件:检查锅炉、汽机完整性,并进行必要的维护和修理。
-确认备用设备的可用性:确保备用锅炉、汽机等设备处于完好状态,以备不时之需。
-确认供电可靠性:检查发电机组和相应的电气设备,确保供电可靠和稳定。
2.启动阶段:-启动锅炉:先启动辅助系统,依次启动给水系统、风机系统、燃油输送系统等,最后点火启动锅炉。
-控制炉膛温度:调整给水流量、燃烧控制系统等,控制好炉膛温度,提供足够的蒸汽。
-启动汽机:按照操作规程,启动汽机,并逐渐提高负荷。
3.正常运行阶段:-控制燃料供给:根据实际需求和外部条件变化,调整燃料的供给量和质量,以保持稳定的发电负荷。
-监测参数:实时监测温度、压力、流量等参数,确保设备运行在安全、稳定的工作范围内。
-排放控制:使用污染物监测仪器,定期监测排放情况,并根据监测结果进行调整,以符合环保要求。
-维护保养:定期进行设备的维护保养,如清洗锅炉、检查机组的磨损情况等,以确保设备的长期可靠运行和安全。
4.停机阶段:-降低负荷:根据运行情况和负荷需求,逐渐降低负荷,减少蒸汽的产生。
-停机准备:根据操作规程,进行相应的准备工作,如停炉、停汽机等。
-关停设备:按照操作规程,逐步关闭辅助设备,如风机、水泵等。
-检查设备状态:对设备进行检查,确保设备正常关闭和安全。
以上是一个MW火电厂仿真运行操作流程的简要介绍。
需要注意的是,具体的操作流程可能会因为不同的火电厂运营模式、设备配置和管理要求而有所差异,操作人员需要遵守相应的规程和操作要求,确保发电过程中的安全和稳定运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿真操作流程:
1,选择机床:按下机床工具按钮,出现机床选择对话框,选FANUC系统—FANUC-0I----车床-----标准(平床身前置刀架)------OK
2,定义毛坯:按下“毛坯选择按钮”出现毛坯选择对话框,根据零件标注尺寸,确定毛坯直径和长度,OK
3,安装零件:按下“零件安装按钮”出现零件安装对话框,鼠标箭头指向所选毛坯(变蓝)------点击“零件安装”出现零件安装对话框------点击向右“+”使零件向右走到极限位置。
4,安装刀具:按下“选择刀具”按钮----确定刀位号-----选择刀片形状----刀柄形状(左向)主偏角95度,刀尖半径设为0度---OK
5,启动机床:按下“绿色”启动按钮,按下红色“急停”(只能按下奇次数,否则“机床报警灯”亮,不能操作)
6,机床回原点(或叫回参考点):点亮“回原点灯”按下“X”,再按下“+”,按下
“Z”再按下“+”,待“X原点灯”和
“Z原点灯”都亮以后。
OK
7,对刀操作:将手动灯点亮,按亮X轴再按“-”使刀架靠近工件,再按亮Z轴再
按“-”使刀具靠近工件,如果想加速,
按下中间带螺纹的快速键。
Z轴对刀:在端面切削少量至中心,沿X 轴退出,离开工件,按系统面板OFFSET 按键,打开工具补正/并把(摩耗变成形状),在缓冲区输入:Z0,按下软键“测量”对应刀号Z下方出现正直,如果出现负值,说明刀具没有回原点,
X轴对刀:手动在外圆处切削少量毛坯,沿Z轴退出,停止主轴,按下拉菜单“测量”保留小余1的圆弧半径,出现工件测量对话框,将鼠标箭头指向刚切削的外圆处,点击变黄,记下变蓝标号X下方的X值,输入此值到工具补正/形状的缓冲区X某值,点击软键“测量”X下方出现正值,如果出现负值,说明开始没有完成回原点工作。
8,编辑程序:点亮“编辑”工作灯,按下系统面板“PROG程序”按钮,输入
O****按下“INSERT插入”,输入所写程序。
常用编辑键的使用方法:
(1)CAN删除缓冲区的内容
(2)DELETE删除显示器光标处的内容(3)ALTER替换光标处的内容,先将光标移至准备替换的内容处,后在缓冲
区书写正确内容,点击ALTER,即可O0001
G97G99m03s500F0.2 t0101.2
G0X102.Z5.
G71U2.R2.
G71P1Q2U0.2W0.2
N1G0X0
G1Z0
X50.Z0
X50.Z-60.
N2X100.Z-80.
G70P1Q2
G0X100.Z50.
M05
M30
编程和运行程序常见问题:
1、每次编好程序,按一下复位键
(RESET)使光标移至程序名字
处。
自动运行。
2、在G70---G73程序段中,没有指
定起始终止行。
(解决方法:检
查G71格式是否有误、是否有首
末行号)
编程常用指令:
1、快速定位指令,
格式:G00 X(U)----Z(W)----
作用:空行程快速移动点定位刀具,不能使刀尖接触工件
2、直线插补(切削)指令,
格式:G01 X(U)—Z(W)---
作用:切削零件轮廓的直线或斜线。
3、顺圆弧插补(切削)指令
格式G02X(U)---Z(W)---R---
作用:切削零件轮廓的顺圆弧线段。
4、逆圆弧插补(切削)指令
格式:G03X(U)---Z(W)---R---
作用:切削零件轮廓的逆圆弧线段。
以上指令中的X 和Z均为终点(目标点)距绝对坐标原点的数值,U是当前点到终点(目标点)在X轴方向的增量。
W是当前点到终点(目标点)在Z轴方向的增量。
R 是圆弧半径值。
5、内、外圆粗车复合循环G71
格式:G00X---Z---
G71 U(△d) R(e);
G71 P(ns) Q(nf) U(△u) W(△w) F(△f)
N(ns)……;
……
精加工轮廓(坐标)切削程序表达式……
N(nf)……
式中符号含义:
△d:粗加工每次的背吃刀量,以半径值表示,一定为正值;
e:每次粗切削结束时的退刀量;
ns:精加工第一个程序段的顺序号;
nf:精加工最后一个程序段的顺序号;
△u:X轴方向的精加工余量,以直径值表示;
△w:Z轴方向的精加工余量;
作用:根据精加工轮廓表达式,对零件进行复合循环粗加工切削
使用注意事项:零件形状中的X数值沿Z 轴方向必须单调递增(外圆)或单调递减(内孔),循环中不能调用子程序指令。
内孔加工时X方向加工余量必须是负值。
6、常用辅助功能(M功能)指令
M03主轴正转
M04 主轴反转
M05 主轴停止
M30 程序停止,并返回到程序头,
M08 切削液开启
M09 切削液关闭
M98 调用子程序
M99 子程序结束
7、刀具功能T****:T代表刀具,前二
位数字代表刀位号,后二位数字代表
刀补号。
8、主轴转速功能S:S****表示主轴每分
钟转数
9、程序传入方法:
在“编辑”状态-----软键
-“操作”----右侧“黑箭头”----小电视(DNC 传输)-----找到存盘位置----打开需传的文件-----读入(READ)-----O1234-------EXEC----程序出现
内孔加工要点:
1、循环起点设在小于所钻内孔直径2—3毫米
2、G71万能指令中,精加工余量U值要设成负值
3、精加工轮廓开始点(N1)G00中的X要设在右端面的内孔最大直径处或设在端面外径
最小处(此时进行端面切削)
宏程序加工要点:
1、初始化中#1=值是曲线坐标系中,第一刀所到达的,X坐标值
#2=值是曲线坐标系中,第一刀所到达的,Z坐标值。
2、WHILE【】括号中#2后面的某数值,是曲线坐标中,轮廓终止点的坐标值,轮廓向右加工时,取小于号“LE”,相反则,取大于号“GE”。
条件满足时,执行下面语句,条件不满足时,则跳转到END语句下面。
3、G01【X….】Z[#1或#2减谋值]中的谋值设定方法如下:使得#1或#2减谋值的差值为,工件坐标系中,第一刀距坐标系原点的Z值。
4、。