有限状态机FSM
Lua中使用状态机FSM简单例子
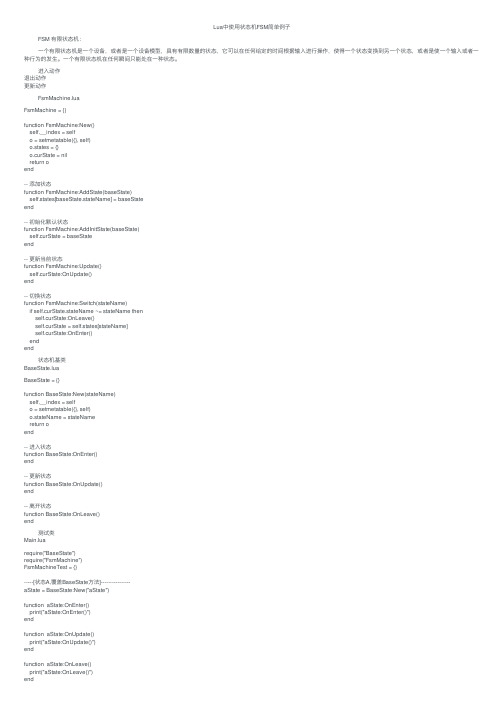
Lua中使⽤状态机FSM简单例⼦FSM 有限状态机:⼀个有限状态机是⼀个设备,或者是⼀个设备模型,具有有限数量的状态,它可以在任何给定的时间根据输⼊进⾏操作,使得⼀个状态变换到另⼀个状态,或者是使⼀个输⼊或者⼀种⾏为的发⽣。
⼀个有限状态机在任何瞬间只能处在⼀种状态。
进⼊动作退出动作更新动作FsmMachine.luaFsmMachine = {}function FsmMachine:New()self.__index = selfo = setmetatable({}, self)o.states = {}o.curState = nilreturn oend-- 添加状态function FsmMachine:AddState(baseState)self.states[baseState.stateName] = baseStateend-- 初始化默认状态function FsmMachine:AddInitState(baseState)self.curState = baseStateend-- 更新当前状态function FsmMachine:Update()self.curState:OnUpdate()end-- 切换状态function FsmMachine:Switch(stateName)if self.curState.stateName ~= stateName thenself.curState:OnLeave()self.curState = self.states[stateName]self.curState:OnEnter()endend状态机基类BaseState.luaBaseState = {}function BaseState:New(stateName)self.__index = selfo = setmetatable({}, self)o.stateName = stateNamereturn oend-- 进⼊状态function BaseState:OnEnter()end-- 更新状态function BaseState:OnUpdate()end-- 离开状态function BaseState:OnLeave()end测试类Main.luarequire("BaseState")require("FsmMachine")FsmMachineTest = {}-----[状态A,覆盖BaseState⽅法]----------------aState = BaseState:New("aState")function aState:OnEnter()print("aState:OnEnter()")endfunction aState:OnUpdate()print("aState:OnUpdate()")endfunction aState:OnLeave()print("aState:OnLeave()")end-----[状态B,覆盖BaseState⽅法]----------------bState = BaseState:New("bState") function bState:OnEnter()print("bState:OnEnter()")endfunction bState:OnUpdate()print("bState:OnUpdate()")endfunction bState:OnLeave()print("bState:OnLeave()")end-----[测试状态机]-----------------------------fsm = FsmMachine:New()fsm:AddState(aState)fsm:AddState(bState)fsm:AddInitState(aState)for i = 1, 10 doif i == 5 thenfsm:Switch("bState")endfsm.curState:OnUpdate()end输出aState:OnUpdate()aState:OnUpdate()aState:OnUpdate()aState:OnUpdate()aState:OnUpdate()aState:OnLeave()bState:OnEnter()bState:OnUpdate()bState:OnUpdate()bState:OnUpdate()bState:OnUpdate()bState:OnUpdate()。
有限状态机(ASM)(FSM)
(OR ASM)
Sequential circuits are also called finite state machines (FSMs), which is a more formal name that is often found in technical literature. The name derives from the fact that the function behavior of these circuits can be represented using a finite number of states.
begin
if clk'event and clk='1' then
presentstate<=nextstate;
end if;
end process switch_to_nextstate;
when s3=>nextstate<=s4; change_state_mode: process(presentstate)--主控组合进程 y<="100"; begin cout<='0'; case presentstate is when s4=>nextstate<=s0; when s0=>nextstate<=s1; y<="000"; y<="001"; cout<='1'; cout<='0'; when when s1=>nextstate<=s2; others=>nextstate<=s0; y<="010"; cout<='0'; y<="XXX";
有限状态机
可综合的设计中应注意
不使用初始化语句;不使用带有延时的描述; 不使用循环次数不确定的循环语句。
应尽量采用同步方式设计电路。
用always过程块描述组合逻辑,应在敏感 信号列表中列出块中出现的所有输入信号。
基于状态机的设计要点
3.状态编码的定义
在Verilog语言中,有两种方式可用于定义状态编码,分别用
parameter和'define语句实现,比如要为state0、state1、state2
、state3四个状态定义码字为:00、01、11、10,可采用下面
两种方式。
方式1:用parameter参数定义
采用一个always模块描述,状态编码用二进制编码:
• module fsm(clk,ina,out); input clk,ina; output out; reg out; parameter s0 = 3'b00,s1 =3'b01,s2 =3'b10,s3=3'b11; reg[0:1]state; always @ (posedge clk) begin state<=s0;out =0; case(state) s0: begin state<=(ina)?s1:s0;out=0; end s1:begin state<=(ina)?s2:s0;out=0; end s2:begin state<=(ina)?s3:s0;out=0; end s3:begin state<=(ina)?s3:s0;out=1; end endcase end endmodule
1、有限状态机
有限状态机的设计
什么是有限状态机( FSM ) FSM的种类和不同点 设计举例
编译原理 有限状态机及化简

编译原理有限状态机及化简编译原理是计算机科学中的一门重要课程,它研究的是如何将高级语言程序转化为可执行的低级机器语言。
在编译原理中,有限状态机是一种重要的工具,它能够帮助我们理解和设计编程语言的词法结构。
而化简则是在设计有限状态机时的一项重要技巧,能够简化状态机的复杂度,提高编译器的效率。
有限状态机(Finite State Machine,FSM)是一种用于描述系统行为的数学模型。
在编译原理中,有限状态机被广泛应用于词法分析阶段,用于识别和解析程序中的各类词法单元。
有限状态机由一组状态和一组转移函数组成。
状态表示系统所处的某个特定状态,转移函数表示状态之间的转移条件和动作。
通过不断地进行状态转移,有限状态机可以识别和解析输入的程序。
在编译过程中,我们需要将源代码中的字符序列转化为一系列词法单元,如关键字、标识符、运算符等。
有限状态机可以帮助我们识别这些词法单元。
例如,我们可以设计一个有限状态机来识别整数常量。
该状态机的状态可以分为初始状态、扫描状态和接受状态。
初始状态表示状态机的起始状态,扫描状态表示状态机正在扫描数字字符,接受状态表示状态机已经扫描完整个整数常量。
通过定义合适的转移函数,我们可以使状态机按照预定的规则进行状态转移,最终得到正确的整数常量词法单元。
在设计有限状态机时,我们常常需要考虑状态的合并和化简。
化简是指将状态机中的一些状态合并为一个等价的状态,从而减少状态的数量。
通过化简可以使状态机更加简洁,提高编译器的效率。
化简的过程中,我们需要考虑状态之间的等价性。
两个状态是等价的,当且仅当它们在任何输入条件下都具有相同的转移行为。
通过判断状态的等价性,我们可以将等价的状态合并为一个新的状态,从而化简状态机。
化简状态机的过程可以使用等价类划分算法来实现。
该算法首先将状态划分为两个互不相交的等价类:接受状态和非接受状态。
然后,对每个等价类进行划分,直到无法再进行划分为止。
最终,我们可以得到一个化简后的状态机,其状态数量更少,但仍能正确识别和解析程序中的词法单元。
有限状态机FSM设计

有限状态机(FSM)设计利用VHDL设计的许多实用逻辑系统中,有许多是可以利用有限状态机的设计方案来描述和实现的。
无论与基于VHDL的其它设计方案相比,还是与可完成相似功能的CPU相比,状态机都有其难以逾越的优越性。
它主要表现在以下几方面:由于状态机的结构模式相对简单,设计方案相对固定,特别是可以定义符号化枚举类型的状态,这一切都为VHDL综合器尽可能发挥其强大的优化功能提供了有利条件。
而且性能良好的综合器都具备许多可控或不可控的专门用于优化状态机的功能。
状态机容易构成性能良好的同步时序逻辑模块,这对于对付大规模逻辑电路设计中令人深感棘手的竞争冒险现象无疑是一个上佳的选择,加之综合器对状态机的特有的优化能,使得状态机解决方案的优越性更为突出。
状态机的VHDL设计程序层次分明,结构清晰,易读易懂,在排错、修改和模块移植方面,初学者特别容易掌握。
在高速运算和控制方面,状态机更有其巨大的优势。
由于在VHDL中,一个状态机可以由多个进程构成,一个结构体中可以包含多个状态机,而一个单独的状态机(或多个并行运行的状态机)以顺序方式的所能完成的运算和控制方面的工作与一个CPU类似。
由此不难理解,一个设计实体的功能便类似于一个含有并行运行的多CPU的高性能微处理器的功能。
事实上这种多CPU的微处理器早已在通信、工控和军事等领域有了十分广泛的应用。
就运行速度而言,尽管CPU和状态机都是按照时钟节拍以顺序时序方式工作的,但CPU 是按照指令周期以逐条执行指令的方式运行的;每执行一条指令通常只能完成一项操作,而一个指令周期须由多个CPU机器周期构成,一个机器周期又由多个时钟周期构成,一个含有运算和控制的完整设计程序往往需要成百上千条指令。
相比之下,状态机状态变换周期只有一个时钟周期,而且由于在每一状态中状态机可以完成许多并行的运算和控制操作,所以一个完整的控制程序,即使由多个并行的状态机构成,其状态数也是十分有限的。
有限状态机在单片机编程中的应用
有限状态机在单片机编程中的应用
有限状态机在单片机编程中的应用:
一、什么是有限状态机
有限状态机(Finite State Machine,FSM),也叫确定有限状态自动机,是一
种常用的数学计算模型,用来描述系统状态以及状态间转移的触发条件变化和行为转移,经常被用来模拟、确定和设计计算机程序和其它由许多步骤构成的工作流程。
二、单片机与有限状态机的应用
1、有限状态机可以有效的帮助开发者实现复杂的自动化控制系统。
通过有限
状态机,可以定义不同的流程,分析控制逻辑,以及控制程序的全部运行规律。
2、当需要实现复杂功能,控制流程时,通常使用有限状态机。
由于单片机可
以很好的模拟有限状态机,并且具有很好的计算能力,处理各种控制逻辑,所以单片机是一种优秀的解决方案。
三、单片机编程中,有限状态机应用的优势
1、有限状态机具有可视化、高效性和可维护性,这些特性使得它在单片机编
程中非常有用,能够使开发人员方便地理解流程、管理控制逻辑,提高编程的开发效率和稳定性。
2、有限状态机可以把程序划分为一些外部可见的变量和控制代码,简化程序
的设计和调试,大大减少开发难度和工作量,同时也提高了程序运行的可靠性。
3、有限状态机能够很好的处理复杂的状态转移问题,如果将有限状态机运用
到单片机的开发中,可以使程序的处理有更清晰的划分,让代码更易维护,更方便调试。
四、总结
从上面的分析可以清楚的看出,使用有限状态机的开发方式,可以有效地提高程序的可读性,可靠性,可维护性等等,因此,在单片机编程中运用有限状态机无疑是一个很好的选择。
状态机FSM设计PPT课件

状态机在软件设计、硬件设计、控制 系统等领域中广泛应用,用于实现复 杂的逻辑控制、错误处理、通信协议 等功能。
状态转换原理
状态转换条件
状态机从一个状态转换到另一个状态需要满足一定的条件,这些条 件可以是外部输入、内部状态或时间等。
状态转换过程
当满足状态转换条件时,状态机会从当前状态跳转到下一个状态, 同时执行相应的动作或操作。
3
使用子状态机
将复杂状态机拆分为多个子状态机,提高可管理 性。
提高代码可读性和可维护性
规范化命名
为状态和转换使用清晰、一致的命名规则。
添加注释
在关键部分添加注释,解释状态和转换的意 图。
模块化设计
将状态机实现为独立的模块,方便复用和测 试。
调试和测试方法分享
日志记录
在关键状态转换处添加日志记录,便于跟踪 和调试。
断点调试
使用断点调试工具,逐步执行状态机代码, 观察状态变化。
单元测试
编写针对状态机的单元测试,确保每个状态 和转换的正确性。
集成测试
将状态机与其他模块集成,进行整体测试, 验证系统功能的正确性。
06 总结与展望
本次课程回顾与总结
状态机基本概念
介绍了状态机的定义、组成要素、工 作原理等基本概念。
度,使程序更易于理解和扩展。
有限状态机在软件架构中的作用
有限状态机的定义
有限状态机(Finite State Machine,FSM)是一种具有有限个 状态的系统,它在外部事件的驱动下发生状态转移。
FSM在软件架构中的位置
在软件架构中,FSM可作为核心组件,用于控制系统的行为和流程。
FSM对软件架构的影响
使用Verilog或VHDL等硬件描述语言,可以方便地描述和实现状态机。通过定义状态、 输入、输出以及状态转移条件,可以构建出功能强大的状态机。
模糊状态机(FuSM)
模糊状态机(FuSM)FSM (有限状态机):涉及到不同状态之间的转换,且系统一次只处于一个当前状态。
FuSM(模糊状态机):有限状态机的一个变种,建立在模糊逻辑的概念之上,一般定义为“被扩展来处理部分真相概念的传统逻辑(bool 逻辑)的超集”。
应该注意,虽然FuSM建立在模糊逻辑概念之上,但不代表是实实在在的模糊系统。
部分真值是一个非常强大的概念。
与常规的FSM不同,FuSM在范围上不具有一般性。
与FSM一样,FuSM跟踪一系列可能的游戏状态。
但不同的是,FSM具有一个单一的当前状态,然后通过转换到一个不同的状态来响应输入事件,而FuSM 可能同时具有多个状态,因此不存在转换。
模糊系统中的每个状态都计算一个"激活水平",该激活水平决定了系统处于任意给定状态的程度,因此,系统的整体行为由当前被激活状态的贡献组合来决定。
FuSM仅仅对那些能够同时处于多个状态并且具有超越简单数字值(如开或关,关闭或打开,生存或死亡)的系统有用,模糊数值用于描述部分开,几乎关闭和未完全死亡等。
另一种对此类数值类型进行量化的方法是使用一个归一系数(0.0 与 1.0之间的数)来表示条件对各个端状态的隶属度(例如:0.0表示完全关闭,1.0表示完全开启),尽管对于FuSM来说归一化并不是必须的。
这是不必记住集合隶属度的所有权限制的一种简单方式,同时也确保了集合隶属度值之间比较的简单性。
关于什么是真正的FuSM,在游戏AI领域还存在一些混淆的看法,因为在同一类别中存在好几个FSM 变种被当作是FuSM。
这些变种包括:1::具有转换优先级的FSM. 在该模型中,必须对每个可用状态的激活水平进行计算(该模型仍然是一个FSM,因此每个状态都有一系列可能的转换);然后那个具有最高激活水平的状态获胜,成为新的当前状态。
这是许多程序员使用模糊度概念来增加其决策状态机的方式,但该系统仍然是一个FSM,并且类似系统输出行的可预测性仅仅比常规FSM稍微小一点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Mealy 状态机
下一个状态 = F(当前状态,输入信号); 输出信号 = G(当前状态,输入信号);
输入
下一状态 激励信号 的逻辑 F 状态 寄存器
clk 输入
当前状态
输出逻辑 G
输出
时钟信号clk
Moor 状态机
下一个状态 = F(当前状态,输入信号) 输出信号 = G(当前状态);
输入
下一状 态的逻 辑 F
第八章 有限状态机 (FSM-Finite State Machine)
学习内容:
什么是有限状态机 有限状态机的设计规则 基于verilog状态机设计的三种方式 有限状态机的小结
状态机的生活实例
一个学生,为了不耽误第一节课,每个工作日早上 六点起床。可是到了周末,可能想睡觉,不用早起。 当你还在睡觉,闹钟却在六点响了,并且把你吵醒了。 如果是工作日,关掉闹钟,起床,为新的一天做准备。 然而,若是周末,你忘记了调整闹钟,则到时候你可 能会生气的关掉闹钟(丢掉房子的一边,仍到厕所里 冲走,或者把它报废),然后继续睡觉。 我们可以用图1所示的有限状态机来模拟这一连串 的事件。
001
1/0 0/0
100
011
1/0
010
1/0
图2 1101序列检测器状态图
(3)根据状态图的状态数选择触发器的类型与个数
由图2可知,需要使用3个触发器,本题选用D触发器 (4)根据状态图列出次态卡诺图如图3所示
0/0 1/0
Q2Q1
000
0/0 1/1
0/0 0/0
001
1/0 0/0
11 00 01 10 XQ3 00 0000/0 0000/0 0000/0 0011/0 01 0000/0 1/0
×××/ × ×××/ × ×××/ × ×××/ × ×××/ × ×××/ ×
100
011
1/0
010
11
0010/0
10 1001/0 1010/0 1100/1 1010/0
图2 1101序列检测器状态图
图3 1101序列检测器次态卡诺图
(5)根据次态卡诺图画分解卡诺图,然后求状态方程和 输出方程 Q3卡诺图
5
RTL级FSM的判断标准
(1)FSM要安全、稳定性高; (2)FSM速度要快,满足设计的频率要求; (3)FSM面积要小,满足设计的面积要求; (4)FSM设计要清晰、易维护;
有限状态机(FSM)
状态机包含的要素可归纳为4个:现态、条件、动作、 次态。 “现态”和“条件”是因,“动作”和“次态”是果。 现态:是指当前所处的状态。 条件:又称为“事件”。 动作:条件满足后执行的动作。 次态:条件满足后要迁往的新状态。“次态”是相对于 “现态”而言
有限状态机克服了纯硬件数字系统顺序方式控制不灵活 的缺点
状态机的结构模式相对简单,层次分明、易读易懂易排 错 状态机容易构成性能良好的同步时序逻辑模块 状态机的verilog表述丰富多样,综合器易于优化 利用同步时序和全局时钟线可实现高速有限状态机 可靠性高,非法状态易控制
FSM是为时序电路设计而创建的特殊模型技术,在针对
有限状态机(FSM)-建模
有限状态机的Verilog描述:
定义模块名和输入输出端口; 定义输入、输出变量或寄存器; 定义时钟和复位信号; 定义状态变量和状态寄存器; 用时钟沿触发的always块表示状态转移过程;
0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1
n Q3n1 Q2 1 Q1n1 Fout
CP 8 9 10 11 12 13 14 15
X 1 1 1 1 1 1 1 1
Q3n
0 0 0 0 1 1 1 1
n Q2
n Q1n Q3n1 Q2 1 Q1n1 Fout
0 0 0 0 0 0 0 0
0 0 1 0 0 0 1 0
0 0 1 0 0 0 1 0
0 0 0 0 0 0 0 0
0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1
0 0 0 1 0 0 0 1
0 1 1 0 1 1 1 1
1 0 0 0 0 0 0 1
0 0 0 1 0 0 0 0
(4)由转移方程和输出方程得到状态/输出表
Q0n+1 = Q0·X’ + Q0’·X
Q1n+1 = Q1·X’ + Q1’·Q0·X + Q1·Q0’·X MAX = Q1·Q0·X X S 00 01 10 11 Q1Q0 0 00/0 01/0 10/0 11/0 1 01/0 10/0 11/0 00/1 X 0 0 0 0 1 1 1 1 状态转换表 Q1 Q0 Q1* Q0* 0 0 0 0 0 1 0 1 1 0 1 0 1 1 1 1 0 0 0 1 0 1 1 0 1 0 1 1 1 1 0 0 MAX 0 0 0 0 0 0 0 1
01
0
× ×
11
0
× ×
XQ3 00
00
0 0 0 0
01
0
× ×
11
0
× ×
10
0
× ×
01 11
10
01 11
10
0
1
0
0
1
0
n n n Q1n1 X Q3n Q2 Q1n XQ2 Q1n X Q2 Q1n
n Fout X Q3nQ2 Q1n
(6)根据状态方程和D触发器的特征方程求驱动方程
Stop
Clear
A=1/K2=1
状态机的设计包含两个主要过程: 一是状态机的编码,二是状态机的建模。
有限状态机(FSM)-编码
状态编码又称状态分配。设计时,须综合考虑电路复杂度 和电路性能这两个因素,选择编码方法。 二进制编码、格雷编码、完整一位热编码( verbose onehot) 、简化一位热编码( simplified one-hot )
任务顺序非常明确的电路(如交通灯控制器)是非常实用。
理论上,任何时序电路都可以建立FSM模型,但并不 总是一种高效的方法。
如果一味地追求使用FSM来设计时序电路,可能会导 致代码冗长和容易出错。 例如,任务简单的寄存器就不必使用FSM方式实现。 又例如,虽然任务与顺序很明确,但任务数目太多或 者性能要求较高时,也不宜用FSM方式实现。
0 D触发器特征方程:Qn+1 = D
Q ’
Q0n+1 =QQ0·X’ + Q0’·X 1
Q1n+1= Q1’1·X’ + Q1’·Q0·X Q + Q1·Q0’·X
CLK
D1
Q1
(1)由电路得到激励方程 D0 = Q0·X’ + Q0’·X
(2)由电路得到输出方程 MAX = Q1·Q0·X
D1 = Q1·X’ + Q1’·Q0·X + Q1·Q0’·X
实际上,这个状态机就是你自己。你可能处于下列三个状态 之一:睡眠中,醒了但还在床上,或起床。你接受两个输入: 唤你醒来的闹钟和当天是否是工作日,后者决定你对闹钟的反 映态度。在这个例子中,唯一的输出就是关掉闹钟。
简化的状态机的例子(续)
闹钟
工作ห้องสมุดไป่ตู้ 关掉闹钟
状态机
状态
图1状态机模型:(b)闹钟系统
为什么要使用状态机
X=0
(10)自启动电路设计
有限状态机(FSM)
A/K1=0
同步时钟:clk 输入信号:reset、A 输出信号:K1、K2 状态转移发生在时钟上升沿触
Start
!A !Reset /K2=0 K1=0
!Reset /K2=0 K1=0
Idle
!Reset / K2=0 K1=0 (!Reset |!A )/ K2=0 K1=1
有限状态机(FSM)
状态机一般包括组合逻辑和寄存器逻辑两部分。寄存器用 于存储状态,组合电路用于状态译码和产生输出信号。 根据输出信号产生方法的不同,状态机可分为米里 (Mealy) 机和摩尔(Moore) 机。
米里(Mealy) 机的输出是当前状态和输入信号的函数。
摩尔(Moore) 机的输出仅是当前状态的函数。 在硬件设计时,需自行决定采用哪种状态机。
Q2Q1 Q2Q1
XQ3 00
01
00
0 0 0 0
01
0
× ×
11
0
× ×
10
0
× ×
11
10
0
1
0
XQ23Q1 Q XQ3 00 00 01 01 11 11 10 10
11 00 01 10 11 00 01 0011/0 0000/0 0000/0 0000/0 10
0 1 0 0 0000/0 ×××/ × ×××/ × ×××/ × × × × 0 0010/0 ×××/ × ×××/ × ×××/ × × × × 1 1001/0 1010/0 1100/1 1010/0 1 0 1 0
0/0 1/0
S0
0/0 1/1
0/0 0/0
S1
1/0 0/0
S4
S3
1/0
S2
1/0
图1 原始状态图
(2)对原始状态图进行状态化简并进行状态编码 从图1原始状态图中可以看出,不存在等效状态,因此 选择000~100表示S0~S4 五个状态,状态图如图2所示。
0/0 1/0
000
0/0 1/1
0/0 0/0