一种双容水箱液位系统的状态反馈控制方法
自动控制实验_单容、双容水箱
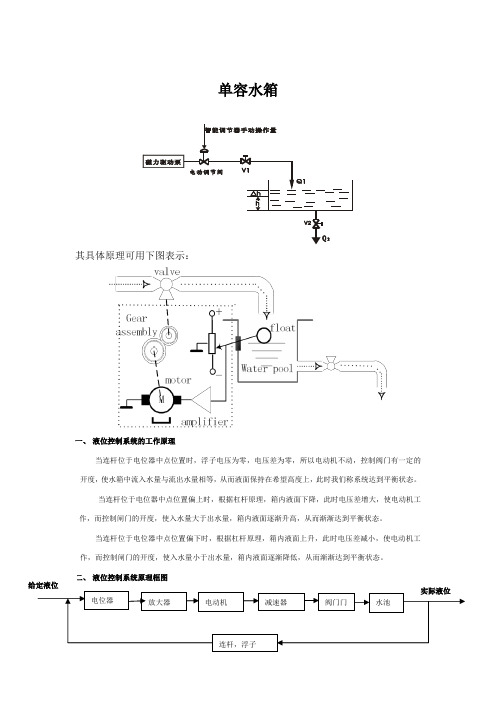
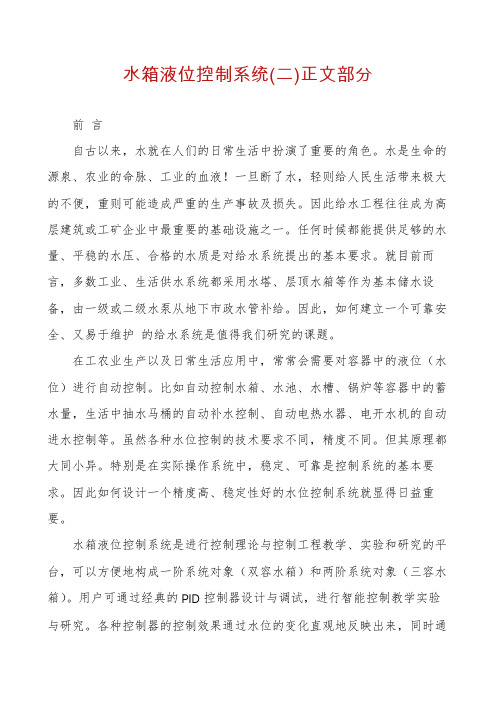
单容水箱其具体原理可用下图表示:一、液位控制系统的工作原理当连杆位于电位器中点位置时,浮子电压为零,电压差为零,所以电动机不动,控制阀门有一定的开度,使水箱中流入水量与流出水量相等,从而液面保持在希望高度上,此时我们称系统达到平衡状态。
当连杆位于电位器中点位置偏上时,根据杠杆原理,箱内液面下降,此时电压差增大,使电动机工作,而控制闸门的开度,使入水量大于出水量,箱内液面逐渐升高,从而渐渐达到平衡状态。
当连杆位于电位器中点位置偏下时,根据杠杆原理,箱内液面上升,此时电压差减小,使电动机工作,而控制闸门的开度,使入水量小于出水量,箱内液面逐渐降低,从而渐渐达到平衡状态。
二、液位控制系统原理框图给定液位实际液位电位器放大器电动机减速器水池阀门门三、 自动控制系统各部分的数学模型的建立以及其传递函数在本控制系统中,我们设Q1为进水量(平衡状态下的增量),Q2为出水量,Ho 为平衡时的水面高度,H 为液面实际高度(平衡状态下的增量),C 为水箱的横截面积。
1)电位计独立工作没什么意义,我们把给定液面体现在电位器上,这就需要电位器和连杆,浮子一起工作,他们是一个整体,实际液面也通过电位器,连杆,浮子与给定电位比较,因为电位器体现的是电压的大小,而我们通过杠杆原理还有浮子,将液面高度与电压的关系联系起来,且两者的关系为正比关系,H (s )为液面高度的拉式变化,U (s )为电压的拉式变化,Go (s )=Ku)(H U(S)S 。
2) 电动机的数学模型设)(t u 为输入的控制电压)(V ,i 电枢电流)(A ,M 为电机产生的主动力矩)(m N •,ω为电机轴的角速度)/(s rad ,L 为电机的电感)(H ,R 为电枢导数的电阻)(Ω,)(t e 电枢转动中产生的反电势)(V ,J 为电机和负载的转动惯量)(2m Kg *根据电路的克希霍夫定理(KVL ):)()(t u t Ri dtdiL=++θ 整理后得:)(2122r rm m e M dt dM T K u K dt d T dt d T T +-=++θωωω式中:R LT =θ称为直流电动机的电气时间常数;m m K K JR T θ=称为直流电动机的机电时间常数;θK K 11=,θK K R K m =2为比例系数。
(最新整理)水箱液位控制系统

(完整)水箱液位控制系统编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)水箱液位控制系统)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)水箱液位控制系统的全部内容。
课程设计报告设计题目:水箱液位控制系统班级:自动化0901班学号:20092395姓名:郝万福指导教师:王姝梁岩设计时间:2012年5月7号----5月25号摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应,饮料、食品加工等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
在这次课程设计中,我们主要是设计一个水箱液位控制系统,涉及到液位的动态控制、控制系统的建模、PID 参数整定、传感器和调节阀等一系列的知识。
通过将电磁流量计和涡轮流量计分别作为主管道和副管道控制系统的调节阀控制水箱液位高度.首先测取被控液位高度过程的图像,建立了主回路的进水流量和主管道流量、进水流量和水箱(上)液位高度、副回路进水流量和水箱(上)液位、双容水箱的进水流量和水箱(下)液位之间的数学模型,从而加强了对液位控制系统的了解。
然后,通过参数试凑法对PID参数的调试,使上述的模型能快速的达到稳定并且超调量和余差等满足设计要求。
最后通过MATLAB仿真实验,加深了对双容水箱滞后过程以及串级水箱液位过程和前馈控制系统的理解,对工业控制工程中对控制系统设计过程有了一定的认识。
双容水箱液位控制系统

双容水箱液位控制系统郭晨雨04123096914282178qq.目录摘要2一.PID控制原理、优越性,对系统性能的改善5二.被控对象的分析与建模7三.PID参数整定方法概述93.1 PID控制器中比例、积分和微分项对系统性能影响分析93.1.1 比例作用93.1.2 积分作用103.1.3 微分作用113.2 PID参数的整定方法133.3 临界比例度法153.4 PID参数的确定18四.控制结构194.1 利用根轨迹校正系统194.2 利用伯德图校正系统234.3 调整系统控制量的模糊PID控制方法254.3.1模糊控制部分264.3.2 PID控制部分30五.控制器的设计30六.仿真结果与分析32七.结束语34参考文献35摘要:针对双容水箱大滞后系统,采用PID方法去控制。
首先对PID控制中各参数的作用进行分析,采用根轨迹校正、伯德图校正的方法,对系统进行校正。
最后采用调整系统控制量的模糊PID控制的方法,对该二阶系统进行控制。
同时,在MATLAB下,利用Fuzzy工具箱和Simulink仿真工具,对系统的稳定性、反应速度等各指标进行分析。
关键字:双容水箱,大滞后系统,模糊控制,PID,二阶系统,MATLAB ,SimulinkAbstract:For Two-capacity water tankbig lag system,using PID to control this system. First, to analyze the effectofeach parameter of PID. And the root-locus technique andbode diagram is adopted to design the correcting Unit.Then, fuzzy PID control method was used to adjust this second-order system.And a simulation model of this system is built with MATLAB Fuzzy and SIMULINK,with it analyzing the system stability ,reaction velocity and other indexs.Keywords:two-capacity water tank,big lag system,fuzzy control,PID,second-order system一.PID控制原理、优越性,对系统性能的改善当今的自动控制技术绝大多数部分是基于反馈。
PID水箱液位控制

摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题,例如居民生活用水的供应,饮料、食品加工,溶液过滤,化工生产等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度,既不能太满溢出造成浪费,也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
PID控制(比例、积分和微分控制)是目前采用最多的控制方法。
本文主要是对一水箱液位控制系统的设计过程,涉及到液位的动态控制、控制系统的建模、PID算法、传感器和调节阀等一系列的知识。
作为单容水箱液位的控制系统,其模型为一阶惯性函数,控制方式采用了PID算法,调节阀为电动调节阀。
选用合适的器件设备、控制方案和算法,是为了能最大限度地满足系统对诸如控制精度、调节时间和超调量等控制品质的要求。
利用Matlab仿真,整定PID参数,得出仿真曲线,得到整定参数,控制效果很好,实现了水箱液位的控制。
关键词:PID控制过程控制液位控制Matlab目录摘要I第一章绪论11.1过程控制的定义11.2过程控制的目的11.3过程控制的特点21.4过程控制的发展与趋势3第二章水箱液位控制系统的原理42.1 人工控制与自动控制42.2 水箱液位控制系统的原理框图52.3 水箱液位控制系统的数学模型6第三章水箱液位控制系统的组成93.1 被控制变量的选择93.2 执行器的选择93.3 PID控制器的选择123.4 液位变送器的选择14第四章PID控制规律164.1 比例控制164.2积分控制(I)194.3微分控制(D)194.4比例积分控制(PI)204.5比例积分微分控制(PID)20第五章利用MATLAB进行仿真设计215.1 MATLAB设计215.2 MATLAB设计任务215.3 MATLAB设计要求215.4 MATLAB设计任务分析225.4 MATLAB设计任务分析235.5 MATLAB设计内容285.5.1主回路的设计285.5.2副回路的设计285.5.3主、副回路的匹配295.5.4 单回路PID控制的设计305.5.5串级控制系统的设计35心得体会39参考文献40第一章绪论1.1过程控制的定义生产过程自动化,一般是指石油、化工、冶金、炼焦、造纸、建材、陶瓷及电力发电等工业生产中连续的或按一定程序进行的生产过程的自动控制。
水箱液位控制系统(二)正文部分
水箱液位控制系统(二)正文部分前言自古以来,水就在人们的日常生活中扮演了重要的角色。
水是生命的源泉、农业的命脉、工业的血液!一旦断了水,轻则给人民生活带来极大的不便,重则可能造成严重的生产事故及损失。
因此给水工程往往成为高层建筑或工矿企业中最重要的基础设施之一。
任何时候都能提供足够的水量、平稳的水压、合格的水质是对给水系统提出的基本要求。
就目前而言,多数工业、生活供水系统都采用水塔、层顶水箱等作为基本储水设备,由一级或二级水泵从地下市政水管补给。
因此,如何建立一个可靠安全、又易于维护的给水系统是值得我们研究的课题。
在工农业生产以及日常生活应用中,常常会需要对容器中的液位(水位)进行自动控制。
比如自动控制水箱、水池、水槽、锅炉等容器中的蓄水量,生活中抽水马桶的自动补水控制、自动电热水器、电开水机的自动进水控制等。
虽然各种水位控制的技术要求不同,精度不同。
但其原理都大同小异。
特别是在实际操作系统中,稳定、可靠是控制系统的基本要求。
因此如何设计一个精度高、稳定性好的水位控制系统就显得日益重要。
水箱液位控制系统是进行控制理论与控制工程教学、实验和研究的平台,可以方便地构成一阶系统对象(双容水箱)和两阶系统对象(三容水箱)。
用户可通过经典的PID控制器设计与调试,进行智能控制教学实验与研究。
各种控制器的控制效果通过水位的变化直观地反映出来,同时通过液位传感器对水位的精确检测,方便地获得瞬态响应指标,准确评估控制性能。
开放的控制器平台,便于用户进行自己的控制器设计,满足创新研究的需要。
这种系统不仅适用于工业用水的控制,也适用于日常生活和农业生产上的液位控制。
1 系统结构原理1.1自动控制系统的组成(1)自动控制系统是由被控对象和控制装置组成的一个有机总体。
被控对象的输出量即被控量是要求严格加以控制的物理量;而控制装置则是对被控对象施加控制作用的机构的总体,它可以采用不同原理和方式对被控对象进行控制,但最基本的一种是基于反馈控制原理组成的反馈控制系统。
一种双容水箱液位系统的状态反馈控制方法

一种双容水箱液位系统的状态反馈控制方法双容水箱液位系统是指系统中有两个水箱,通过管道相连,其中一个作为主水箱,另一个作为辅助水箱。
液位系统的控制是指通过控制系统对水箱中的液位进行监测和调节,以确保系统稳定运行。
状态反馈控制方法是指通过对系统状态进行实时监测和反馈,对系统进行控制。
双容水箱液位系统常常用于工业生产中的液位控制,例如用于控制锅炉的水位或者蒸汽发生器的水位。
在这种系统中,液位的精确控制是非常重要的,可以保证系统的安全运行和生产的稳定性。
传统控制方法主要是指经验法则和经验参数的调节,常见的方法包括比例控制、积分控制和微分控制。
其中比例控制通过测量水箱的液位并与给定的水位进行比较,从而调节控制阀的开度,使得水位保持在设定值附近。
而积分控制则通过对比实际液位和设定值的差异进行累积,以消除静差。
微分控制则是通过对实际液位变化速率的测量进行控制,以增强系统的稳定性。
传统控制方法存在的问题是对于非线性系统难以准确控制,容易受到环境干扰和参数变化的影响,因此在实际应用中效果并不理想。
与传统控制方法相比,现代控制方法更加灵活和精确,典型的现代控制方法包括模糊控制、遗传算法控制和神经网络控制等。
模糊控制是一种基于模糊逻辑的控制方法,通过建立模糊规则来实现对系统的非线性控制。
遗传算法控制则是通过模拟生物进化过程中的优化机制,寻找最优的控制参数。
而神经网络控制利用人工神经网络的信息处理和学习能力,实现对系统的精确控制。
在双容水箱液位系统中,采用现代控制方法有以下几个优点:1. 对非线性系统的控制效果更好。
传统的比例积分微分控制方法对于非线性系统难以准确控制,而现代控制方法可以更好地适应系统的非线性特性,提高控制精度。
2. 对环境干扰和参数变化的鲁棒性更强。
现代控制方法可以通过对系统状态的实时监测和反馈,及时调整控制参数,以应对环境干扰和参数变化带来的影响。
3. 可以实现自适应控制。
现代控制方法可以通过对系统状态的实时监测和数据的学习,实现对系统的自适应控制,从而达到更好的控制效果。
一种双容水箱液位系统的状态反馈控制方法

一种双容水箱液位系统的状态反馈控制方法双容水箱液位系统是一种常见的液位控制系统,该系统由两个水箱组成,一个接受输入信号控制液位上升,另一个通过输出信号控制液位下降。
为了实现对系统液位的准确控制,需要采用状态反馈控制方法。
状态反馈控制方法是一种通过测量系统状态并根据测量结果进行控制的方法。
在双容水箱液位系统中,系统状态即为水箱的液位。
基本思想是通过测量液位,然后根据测量结果进行控制,使得实际液位能够与期望值保持一致。
需要建立双容水箱液位系统的数学模型。
通常可以利用质量守恒原理来建立系统的动态方程。
由于液位是连续的变量,可以利用容积与液位之间的关系来建立模型。
假设两个水箱的液位分别为h1和h2,输入信号为u,输出信号为y,根据质量守恒原理可以得到如下动态方程:V1 * dh1/dt = Qin - QoutV2 * dh2/dt = Qout - QinV1和V2分别为水箱1和水箱2的容积,Qin和Qout分别为输入流量和输出流量。
根据流量-液位的转化关系,可以得到:将上述方程代入动态方程中,可以得到双容水箱液位系统的数学模型。
然后,需要设计状态反馈控制器。
状态反馈控制器的作用是根据当前的状态值来计算控制输入,使得系统状态能够逐渐趋于期望值。
在这里,期望值即为所需液位。
状态反馈控制器的设计可以利用线性二次调节器(LQR)方法。
LQR方法基于系统的状态空间模型,通过对系统状态变量和控制输入变量进行加权,得到最优控制器。
可以定义一个性能指标,如系统状态与期望值之间的误差平方的积分,然后通过求解Riccati方程得到最优的加权矩阵,从而得到最优控制器。
将设计好的状态反馈控制器与双容水箱液位系统相连。
通过测量实际液位,然后根据测量结果计算控制输入,将控制输入传递给系统,使得实际液位能够逐渐趋于期望值。
双容水箱液位系统的状态反馈控制方法包括建立系统数学模型、设计状态反馈控制器以及将控制器与系统连接起来。
该方法可以实现对液位的准确控制,提高系统的稳定性和运行效果。
双容液位控制系统的设计
双容液位控制系统的设计摘要在化学工业生产中,液位控制是一项非常重要的环节。
本论文所论述的双容液位控制系统是以过程综合自动化控制系统实验为平台,以仪表控制方法为主要工具,进行液位控制方法设计。
智能控制仪表蕴含大量高科技技术,且具备许多优点,因此越来越广泛的被应用于工业控制领域。
论文也对组态软件MCGS的特点及基本使用方法进行了简单介绍,这样对串级控制实施监控,提供了条件。
在控制算法方面,系统选用PID控制器。
然后根据系统具体的控制要求,主回路选择PI调节器,副回路选择P调节器;并选用适当整定法对调节器参数进行整定。
关键词:双容液位控制系统,智能仪表控制,MCGS组态软件,PID控制?—Dual-tank liquid level control system designAbstractProduction in the chemical industry, liquid level control is a very important part. Discussed in this paper two-tank liquid level control system is based on the process of experiments Integrated Automation Control System as a platform to instrument control as the main instrument designed for liquid level control. Intelligent Control Instrument contains a large number of high technology, and have many advantages, so more and more widely applied in industrial control.Papers also features MCGS configuration software and the basic use a brief introduction, this implementation of the cascade control monitoring, provided the conditions.In the control algorithm, the system adopts PID controller. And specific control requirements according to the system, the main loop select PI regulator, the Deputy loop select P regulator; and an appropriate tuning the parameters of the regulator tuning.\Key words: dual-tank liquid level control system, intelligent instrument control, MCGS configuration software, PID control目录双容液位控制系统的设计 (i)、摘要 (i)Abstract (ii)1 绪论 (1)课题来源,背景及意义 (1)课题研究的内容安排 (2)2 THJ-2型高级过程控制系统 (3)系统简介和组成 (3)系统控制仪表的组成 (3)、检测装置 (3)执行机构 (4)控制器 (4)智能仪表的发展前景、应用领域和优点 (4)系统软件 (5)系统特点 (5)本章小结 (6)3 MCGS组态软件 (7)—什么是MCGS组态软件 (7)MCGS组态软件的系统构成 (7)MCGS组态软件的特点 (7)建立MCGS工程 (8)设计画面流程 (9)整体画面 (13)本章小结 (15)4 液位串级控制系统分析与建模 (16)-串级控制系统的分析 (16)串级控制系统及组成结构 (16)串级控制系统的特点和适用场合 (16)串级控制系统的设计 (16)双容水箱液位串级控制系统的组成 (17)系统建模 (18)系统特性测试 (19)模型最终确定 (21);本章小结 (22)5 系统的PID参数整定 (23)PID概述 (23)控制器参数整定方法 (23)PID参数的确定 (27)系统特性测试. (28)本章小结 (30)6 结论 (31)!参考文献 (32)致谢 (33)?1 绪论课题来源,背景及意义过程控制涉及炼油、化工、发电、冶金、造纸、医药和轻工业等工业部门,对国民经济的发展起着十分重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种双容水箱液位系统的状态反馈控制方法
双容水箱液位系统是一种常见的控制系统,用于控制水箱中的液位。
系统由两个水箱和一根连接两个水箱的管道组成。
该系统的目标是通过控制水流进入和流出水箱来维持水箱的液位在设定值附近。
一种常用的控制方法是状态反馈控制。
状态反馈控制是基于系统的状态变量(如液位)进行控制的方法。
该方法通过测量系统的状态变量,计算出控制输入,并将其作为反馈信号输入到系统中。
这样,系统就可以根据测量到的状态变量来调节控制输入,以使系统的状态达到设定值。
1. 系统建模:需要建立双容水箱液位系统的数学模型。
这个模型描述了系统的动态
行为,可以根据系统的物理特性和控制需求进行建立。
常用的建模方法包括基于物理原理的动力学方程和基于经验数据的系统辨识方法。
2. 设计状态反馈控制器:基于系统的模型,可以设计状态反馈控制器。
控制器可以
根据系统的状态变量进行调节,并产生控制输入。
在设计过程中,可以使用控制理论中的方法,如线性二次调节器(LQR)或H∞控制来设计控制器的增益矩阵。
3. 系统仿真:使用建立的数学模型,可以进行系统的仿真来评估控制器的性能。
在
仿真中,可以考虑不同的初始条件和控制输入,并观察系统的响应。
如果系统的响应满足控制需求,可以进一步优化控制器的参数。
4. 控制器实现:将设计好的控制器实现到实际的控制系统中。
这需要选择合适的控
制器实现方式,如模拟电路、数字控制器或嵌入式系统。
控制器实现后,可以进行系统的实时控制实验。
5. 控制器调试和优化:在实际的控制实验中,可能会出现一些问题,如控制器调节
不准确、系统不稳定等。
在这种情况下,需要对控制器进行调试和优化,如调整控制器的增益或改变控制策略等。
双容水箱液位系统的状态反馈控制方法包括系统建模、状态反馈控制器设计、系统仿真、控制器实现以及控制器调试和优化等步骤。
通过这个方法,可以设计出满足控制需求的控制器,并将其应用到实际的控制系统中。