雷达对抗原理1
雷达对抗原理 习题答案
i =1 N
Tri − τ i ) Tri
N N N N τ1 + τ i τ +τ τ +τ τ +τ i ) + ∏ (1 − 2 i ) + ∏ (1 − 3 i ) + ...... + ∏ (1 − N ) Tri Tri Tri Tri i =1,i ≠ 2 i =1, i ≠3 i =1, i ≠ N
jφ D 解: A ± 1 = m ⋅ ⋅ 2 2 2π sin ω x ± λs 2π ωs ± λs F λ0T fs D D 3.25 = = 5µ s vs 0.65 vs fs
λs =
空间位移
ξ +1 = ξ− 1 =
1 T ∆f = 1 τ τ ≥T τ <T
Ta = 65
Ω a = 360 o
Tr = 1.2 × 10−3 s
Ω AoA = 360o
TR = 2min = 120s
Z =1
(1)慢可靠搜索 θ Ta ≤ TR ⋅ r Ω AoA
Ta ⋅ θa ≥ E ⋅ Tr Ωa
6≤
θr 3
θ r ≥ 18o
≥ Z × 10−3 × 1.2
θ r min = 18o
在 0 °, 60 ° ,120 ° ,180 ,° 2 4 0 ,° 3 0 0 ° 上误差最大。 这时, R =
12θ S θr
2
×
θS , θS = θr 2
⇒ R =6
最大误差 dϕ = 1.29 × 6 + 10 = 17.74 ° 最小误差 dϕ = 10°
在 3 0°, 9 0°, 1 5 0°, 2 1 0°, 2 7 0°, 3 3 0° 上误差最小。这时, R = 0 (3)当 N = 4 时, dϕ = 1.29R +
雷达对抗原理系统组成PPT课件

20
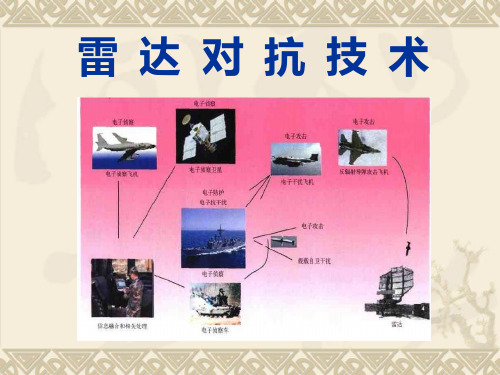
四、雷达对抗涉及的关键技术
测频及脉冲参数测量技术 脉内调制特征分析与识别技术 雷达侦察测向技术 脉冲分选技术 雷达被动定位技术 雷达辐射源识别技术 雷达干扰技术
根据具体的无线电设备划分
通信对抗与反对抗 雷达对抗与反对抗 光电对抗与反对抗 引信对抗与反对抗 敌我识别系统对抗与反对抗
11
12
2019/12/27
二、电子战发展现状及发展趋势 【发展现状】
美军“2010年联合设想”是其确定其装备技术 发展方向和未来高技术作战的基本出发点,为其武 装部队的发展,提供了作战标准,成为其三军设想 的基础,是构建21世纪初高技术战场的蓝本。
产生PDW
21
谢 谢!
22
23
2019/12/27
电子战的listening part 处理对象为雷达系统时称为雷达侦察
6
【电子攻击】
使用电磁或定向能,以削弱、压制或瓦解敌方作战能力为目的对人员和设施或 设备的攻击。
【电子对抗(ECM,electronic countermeasure)】-软杀伤 以阻止或降低敌方对电磁频谱有效利用为目的的电子战行动。 电子干扰—达到破坏、损害或中断敌方使用电磁频谱的目的而有意 进行的电磁能量的辐射、转发或反射。 欺 骗—给敌方电子武器系统传递错误信息或掩盖真实信息而采取的 电磁能量的有意辐射、转发、闪烁、抑制、吸收、屏蔽、增 强或反射等。
【反辐射导弹、定向能武器】-硬杀伤 DEW(Directed Energy Weapons)—使用激光或高功率微波发射来摧毁电子设备或使之 失效。 ARM(Antiradiation missiles)—辐射源寻的。
第1章雷达对抗概述优秀课件
3. 信号综合威胁程度高
现代雷达与各种杀伤性武器系统的结合十分紧密, 如制导雷达、炮瞄雷达、反辐射寻的等,都直接威胁到 雷达对抗设备和人员的生存。由于受到杀伤性武器系 统威力范围的限制,这些雷达往往在目标尚未进入攻击 范围时保持电磁静默(不发射),由其它探测设备提供 信息保障,一旦目标进入攻击范围则立即投入工作,迅速 捕获目标,引导武器攻击。
波束宽度θa在Ωθ范围内扫描
S′是N个具有周期特性的脉冲信号序列
{si(n)}n1,iN01 按照(1―4)式条件的合成。当N
的数量很大时,由于各信号序列的到达时间是相互独立的,
在一定时间内近似满足统计平稳性和无后效性,根据随机
过程理论,S可以采用泊松(Poisson)流近似描述。
在时间τ内到达n个脉冲的概率
i0
(1―5)
式中,fri为第i部雷达的平均脉冲重复频率。在典型 情况下,如果i雷达的工作频率、所在方向、脉冲宽度都 在雷达对抗设备的检测范围内,只要其天线波束指向雷 达对抗设备,接收到的信号功率就能高于接收机灵敏度, 则Pi为
Pi
0 1
a
波束始终不指向雷达对抗设备 波束始终指向雷达对抗设备
第1章雷达对抗概述
1.1 雷达对抗的基本概念及含义
1.1.1 雷达对抗的含义及重要性 在现代战争中,每一个作战装备和作战人员都会因
其在战争中的地位和作用而受到多种雷达和武器系统 的威胁、杀伤。如图1―1所示的一架作战飞行中的军 用飞机,可能会同时遭受到敌方数种雷达、杀伤武器的 威胁。如果它及所在方不能有效地对抗敌方诸多的威 胁雷达和武器系统,则其不仅不能完成预定的作战任务, 甚至不能保证自己的生存。
2. 信号调制复杂,参数多变、快变
雷达通过信号调制波形和参数的选择与变化,可以 获得诸多目标信息检测和抗干扰等方面的利益。随着 信号产生技术和处理技术的发展,一部雷达往往能够根 据需要,产生多种不同调制特性的波形,特别是在脉冲持 续时间内的频率和相位调制;此外,出于反侦察、抗干扰 等的需要,许多雷达都可以改变发射信号的载频、脉冲 重频、脉冲波形或其它调制参数;这种变化的时间可能 是数秒、数十毫秒,甚至到每个发射脉冲都发生捷变。
雷达对抗原理的实验

雷达对抗原理的实验雷达对抗原理的实验是为了研究和验证各种雷达对抗技术的有效性和可行性。
雷达对抗是指通过一系列手段,干扰、欺骗或破坏敌方雷达系统的功能和性能,以达到保护自身隐蔽性、降低被侦测和打击风险的目的。
下面将从实验的目的、方法和结果三个方面详细介绍雷达对抗原理的实验。
实验的目的是通过模拟和重建实际作战环境下的雷达与干扰器、电子对抗系统的相互作用,研究雷达对抗相关理论,并研究不同对抗手段对雷达探测性能的影响。
实验旨在验证各种干扰技术的有效性,评估对抗手段的可行性,为实际作战中的雷达对抗提供依据和指导。
实验的方法主要包括场地实验和仿真实验两种。
场地实验是在实际环境中搭建雷达系统和干扰器的实验平台,通过实际测量和数据分析来验证对抗手段的有效性。
仿真实验是利用计算机模拟雷达系统和干扰器的相互作用过程,通过模拟不同对抗手段的效果来评估其对雷达性能的影响。
在场地实验中,首先需要选择适当的实验场地,搭建合适的雷达系统和干扰器。
雷达系统包括发射机、天线、接收机等各种硬件设备,干扰器包括干扰源、电子对抗系统等。
实验中,可以使用各种对抗手段,如干扰信号发射、频率偏移、干扰源位置偏移等。
通过记录并分析雷达系统接收到的信号,可以评估不同干扰手段对雷达的影响程度。
在仿真实验中,利用计算机建立雷达系统和干扰器的模型,通过设定不同的参数和仿真场景进行模拟实验。
可以通过调整干扰信号的功率、频率等参数,评估不同对抗手段的效果,并比较不同干扰手段之间的差异。
根据实验的目的和方法,可以获得不同对抗手段对雷达系统性能的影响结果。
通过对实验数据进行统计和分析,可以获取雷达对抗的有效手段和方法,并评估其可行性和实用性。
实验结果可以提供给雷达设计师和作战指挥员,作为改进雷达系统或应对对抗措施的参考依据。
总之,雷达对抗原理的实验是为了研究和验证不同对抗手段的有效性和可行性,通过场地实验和仿真实验两种方法,模拟和重建雷达系统与干扰器、电子对抗系统的相互作用过程。
2024年雷达对抗技术01PPT课件
3. 电子战与指挥控制战和信息战的关系
❖ 指挥控制战是进行信息战的军事战略,是军 事信息化的关键和核心。
❖ 指挥控制战的五大支柱是作战作战保密、军 事欺骗、心理战、电子战和实体摧毁。
❖ 电子战是军事信息战的主要手段
4. 现代电子战的新对象C4ISR
现代C4ISR(指挥、控制、通信、计算机、 情报、监视、侦察)系统和精确制导武器系统 广泛地依赖于电磁频谱,因此综合电子战系统 的主要作战对象为敌方的C4ISR系统和精确制 导武器系统。
“哈姆”反辐射导弹
38
F-111歼击轰炸机
F/A-18 大黄蜂歼击机
A-6“入侵者”式舰载攻 1991年,海湾战争爆发。以美国为首的多国 部队对伊拉克实施了规模空前的代号为“白 雪行动”的电子战。
40
EC-130H电子战飞机
F-117A隐形战斗机
41
❖1.2.9 科索沃战争
和水声对抗等; ❖ 2)按配置部位分: ❖ 外层空间对抗、空中对抗、地面(包括海面)对抗和水下对
抗。 ❖ 3) 按频段分: ❖ 射频对抗――频率范围3MHz~300GHz ❖ 光电对抗――频率高于300GHz, 包括红外、可见光、激
光等 ❖ 声学对抗等――频率范围3~300KHz,包括次声波、超
声波等
第1章 雷达对抗概述
1.1 电子对抗的基本概念及含义 1.2 电子战历史 1.3 电子战装备技术发展现状与趋势 1.4 雷达对抗简介 1.5 雷达对抗的信号环境 1.6 雷达侦察概述 1.7 雷达干扰概述 1.8 雷达隐身与反隐身概述 1.9 反辐射攻击武器概述 1.10 雷达对抗技术的发展趋势
1.1 电子对抗的基本概念及含义
❖2) 指挥控制战:
指挥控制战是作战思想和战略,而不是作 战手段。它的攻击对象是包括人员在内的整个 信息系统。主要目的是破坏敌方的指挥控制能 力,保护己方的。
雷达对抗原理1
§2.1 概述
一.频率测量的重要性 1. 频率是雷达功能和用途的反映 2. 频率是选择分选和识别雷达信号的重要参数 3. 频率对准是有效干扰的有效保证 二.指标体系: 1.测频时间 IFM(瞬时测频)
PIF1 = ∆fr / f 2 − f 1 截获时间:达到给定截获概率所用时间 t IF1 ≤ Tr + tth
f L 2 j = f i1 − ∆f r1 / 2 − f i2 + ( j + 0.5)∆f r 2 , j = 0, L m 2 − 1
以此类推:第 k 分路器 m k ,第 k 中放带宽 ∆f rk = ∆f rk −1 / m k , 第 k 中频频率 f ik > ∆f rk−1 / 2 ,第 k 本振组(低外差) :
,为 00
φ 2 = 4 × φ1 = 2π × 4.446 ,取模为: 0.446 × 2π ,
编码: int
0.446 × 2π ,为 01 0.5π
通过第三迟延支路的相位差:
φ 3 = 2π × 4.446 × 4 = 2π × 17.784 ,取模为: 0.784 × 2π ,
f i > (4000 − 2000 )MHZ 2 = 1000 MHZ , 选为 1200MHZ
本振搜索范围:[3200MHZ,5200MHZ] 2)照射时间: Ts = 5 × 2° 360° = 1 36 s ,取 T f = Ts ,由
Tf
∆f r ≥ 1 × 10 −3 4000 − 2000
∆f =
1 = 15.625MHZ 4 2 × 0.5 × 10 −9
3−1 3
2)通过第一迟延支路的相位差:
雷达对抗的名词解释

雷达对抗的名词解释雷达对抗是一种信息对抗技术,是指通过各种手段干扰、破坏敌方雷达系统的正常工作,从而达到混淆、掩护、保护或干扰自身的作战目的。
本文将从雷达基本原理、雷达对抗的方法以及雷达对抗技术的未来发展等方面进行探讨。
一、雷达基本原理雷达是利用电磁波通过发送和接收信号来感知和探测目标的一种无线电设备。
雷达系统通常由发射器、接收器和信号处理器组成。
在雷达工作时,发射器将一束电磁波发送出去,当电磁波碰撞到物体时,一部分会被反射回雷达系统。
接收器接收到返回的信号后,信号处理器会处理并显示出目标的位置、速度等信息。
二、雷达对抗的方法雷达对抗主要有两种基本方法:干扰和隐蔽。
1. 干扰干扰是通过发送干扰信号来干扰敌方雷达系统的正常工作。
干扰信号可以是噪音、杂波、假目标等。
干扰信号可以使敌方雷达系统的接收机受到干扰,从而无法正确接收到目标的回波信号,导致雷达系统无法探测到目标或错误地识别目标。
此外,还有频率突变、信号反转、方位错位等干扰技术,可以使敌方雷达系统误判目标位置和移动速度,降低对目标的打击精度。
2. 隐蔽隐蔽是通过减小雷达系统对目标的侦测概率,降低目标的雷达散射截面积,使目标更难被敌方雷达探测到。
隐蔽技术包括雷达吸波涂层、雷达反射面形状设计、多波束隐身等。
雷达吸波涂层可以吸收入射电磁波,减小反射回波;雷达反射面形状设计可以减小雷达散射截面积,使目标更难被探测到;多波束隐身技术可以通过精确的控制发射和接收的信号方向,使目标的回波的强度减弱,从而降低被侦测到的概率。
三、雷达对抗技术的未来发展随着雷达技术的不断发展,雷达对抗技术也在不断改进和创新。
未来的雷达对抗技术可能会出现以下几个方面的发展趋势:1. 智能化随着人工智能技术的进步,雷达对抗系统可能会引入智能化技术。
智能化的对抗系统可以根据敌方雷达的运行状态和工作模式,自动调整干扰信号的特性和参数,以达到最大的干扰效果。
此外,还可以通过机器学习等技术,自动学习敌方雷达的工作方式和特点,并针对性地进行优化干扰。
大学_《雷达对抗原理》(赵国庆著)课后答案免费下载_1
《雷达对抗原理》(赵国庆著)课后答案免费下载《雷达对抗原理》(赵国庆著)内容提要第1章雷达对抗概述1.1 雷达对抗的基本概念及含义1.1.1 雷达对抗的含义及重要性1.1.2 雷达对抗的基本原理及主要技术特点1.1.3 雷达对抗与电子战1.2 雷达对抗的信号环境1.2.1 现代雷达对抗信号环境的特点1.2.2 信号环境在雷达对抗设备中的描述和参数1.3 雷达侦察概述1.3.1 雷达侦察的任务与分类1.3.2 雷达侦察的技术特点1.3.3 雷达侦察设备的基本组成1.4 雷达干扰概述1.4.1 雷达干扰技术的分类1.4.2 雷达干扰设备的基本组成习题一参考文献第2章雷达信号频率的测量2.1 概述2.1.1 雷达信号频率测量的重要性2.1.2 测频系统的主要技术指标2.1.3 现代测频技术分类2.2 频率搜索接收机2.2.1 搜索式超外差接收机2.2.2 射频调谐晶体视频接收机2.2.3 频率搜索形式2.2.4 频率搜索速度的选择2.3 比相法瞬时测频接收机2.3.1 微波鉴相器2.3.2 极性量化器的基本工原理2.3.3 多路鉴相器的并行运用2.3.4 对同时到达信号的分析与检测2.3.5 测频误差分析2.3.6 比相法瞬时测频接收机的组成及主要技术参数 2.4 信道化接收机2.4.1 基本工作原理2.4.2 信道化接收机存在的问题2.4.3 信道化接收机的特点和应用 2.5 压缩接收机2.5.1 Chirp变换原理2.5.2 表声波压缩接收机的工作原理 2.5.3 压缩接收机的参数2.6 声光接收机2.6.1 声光调制器2.6.2 空域傅立叶变换原理2.6.3 声光接收机的工作原理2.6.4 声光接收机的主要特点习题二参考文献 ?第3章雷达的方向测量和定位3.1 概述3.1.1 测向的目的3.1.2 测向的方法3.1.3 测向系统的主要技术指标3.2 振幅法测向3.2.1 波束搜索法测向技术3.2.2 全向振幅单脉冲测向技术3.2.3 多波束测向技术3.3 相位法测向3.3.1 数字式相位干涉仪测向技术3.3.2 线性相位多模圆阵测向技术3.4 对雷达的定位3.4.1 单点定位3.4.2 多点定位习题三参考文献 ?第4章雷达侦察的信号处理4.1 概述4.1.1 信号处理的任务和主要技术要求 4.1.2 信号处理的基本流程和工作原理 4.2 对雷达信号时域参数的'测量4.2.1 tTOA的测量4.2.2 PW的测量4.2.3?AP的测量4.3 雷达侦察信号的预处理4.3.1 对已知雷达信号的预处理4.3.2 对未知信号的预处理4.4 对雷达信号的主处理4.4.1 对已知雷达信号的主处理4.4.2 对未知雷达信号的主处理4.5 数字接收机和数字信号处理4.5.1 数字接收机4.5.2 数字测频4.5.3 数字测向4.5.4 信号脉内调制的分析习题四参考文献 ?第5章雷达侦察作用距离与截获概率5.1 侦察系统的灵敏度5.1.1 切线信号灵敏度PTSS和工作灵敏度POPS的定义 5.1.2 切线信号灵敏度PTSS的分析计算5.1.3 工作灵敏度的换算5.2 侦察作用距离5.2.1 简化侦察方程5.2.2 修正侦察方程5.2.3 侦察的直视距离5.2.4 侦察作用距离Rr对雷达作用距离Ra的优势 5.2.5 对雷达旁瓣信号的侦察5.3 侦察截获概率与截获时间5.3.1 前端的截获概率和截获时间5.3.2 系统截获概率和截获时间习题五参考文献第6章遮盖性干扰6.1 概述6.1.1 遮盖性干扰的作用和分类6.1.2 遮盖性干扰的效果度量6.1.3 最佳遮盖干扰波形6.2 射频噪声干扰6.2.1 射频噪声干扰对雷达接收机的作用6.2.2 射频噪声干扰对信号检测的影响6.3 噪声调幅干扰6.3.1 噪声调幅干扰的统计特性6.3.2 噪声调幅干扰对雷达接收机的作用 6.3.3 噪声调幅干扰对信号检测的影响 6.4 噪声调频干扰6.4.1 噪声调频干扰的统计特性6.4.2 噪声调频干扰对雷达接收机的作用 6.4.3 噪声调频干扰对信号检测的影响 6.5 噪声调相干扰6.5.1 噪声调相干扰的统计特性6.5.2 影响噪声调相干扰信号效果的因素 6.6 脉冲干扰习题六参考文献第7章欺骗性干扰7.1 概述7.1.1 欺骗性干扰的作用7.1.2 欺骗性干扰的分类7.1.3 欺骗性干扰的效果度量7.2 对雷达距离信息的欺骗7.2.1 雷达对目标距离信息的检测和跟踪7.2.2 对脉冲雷达距离信息的欺骗7.2.3 对连续波调频测距雷达距离信息的欺骗 7.3 对雷达角度信息的欺骗7.3.1 雷达对目标角度信息的检测和跟踪7.3.2 对圆锥扫描角度跟踪系统的干扰7.3.3 对线性扫描角度跟踪系统的干扰7.3.4 对单脉冲角度跟踪系统的干扰7.4 对雷达速度信息的欺骗7.4.1 雷达对目标速度信息的检测和跟踪7.4.2 对测速跟踪系统的干扰7.5 对跟踪雷达AGC电路的干扰7.5.1 跟踪雷达AGC电路7.5.2 对AGC控制系统的干扰习题七参考文献第8章干扰机构成及干扰能量计算8.1 干扰机的基本组成和主要性能要求8.1.1 干扰机的基本组成8.1.2 干扰机的主要性能要求8.2 干扰机的有效干扰空间8.2.1 干扰方程8.2.2 干扰机的时间计算8.3 干扰机的收发隔离和效果监视8.3.1 收发隔离8.3.2 效果监视8.4 射频信号存储技术8.4.1 模拟储频技术(ARFM)8.4.2 数字储频技术(DRFM)8.5 载频移频技术8.5.1 由行波管移相放大器构成的载频移频电路 8.5.2 由固态移相器构成的载频移频电路习题八参考文献第9章对雷达的无源对抗技术9.1 箔条干扰9.1.1 箔条干扰的一般特性9.1.2 箔条的有效反射面积9.1.3 箔条的频率响应9.1.4 箔条干扰的极化特性9.1.5 箔条回波信号的频谱9.1.6 箔条的战术应用9.2 反射器9.2.1 角反射器9.2.2 龙伯透镜反射器9.3 假目标和雷达诱饵9.3.1 带有发动机的假目标9.3.2 火箭式雷达诱饵9.3.3 投掷式雷达诱饵9.3.4 拖曳式雷达诱饵9.4 隐身技术习题九参考文献《雷达对抗原理》(赵国庆著)目录该书系统介绍了雷达对抗的基本原理,系统的组成,应用的主要技术等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.第一类:
,
,
2.第二类:易引起错误 3.同时到达信号检测: 单信号:自混频,无输出,无标志 多信号:混频,有输出,有标志 六.误差分析: φ = ωT ∆φ c :5°鉴相器性能 ∆φ q :量化误差 ∆φ q = ∆φ N :内部噪声 ∆φ i :同时到达信号 七.IFM 接收机的组成及主要技术指标 P29, Fig2-16 1.组成: 限幅放大器 消除幅度影响 延时鉴相器 编码,输出频率 同时到达信号检测:消除不可靠测量 门限检测/定时检测:消除噪声及低 SNR 信噪比信号影响,保证一段时间指测
,为 00
φ 2 = 4 × φ1 = 2π × 4.446 ,取模为: 0.446 × 2π ,
编码: int
0.446 × 2π ,为 01 0.5π
通过第三迟延支路的相位差:
φ 3 = 2π × 4.446 × 4 = 2π × 17.784 ,取模为: 0.784 × 2π ,
f L (t ) = 1000 MHZ + 30MHZ + (2000 − 1000 )MHZ × t ' 10 −3 = 1030MHZ + 10 6 MHZ × t ' , t ' = mod (t ,1ms )
2)在搜索过程中,输出信号有无的时间 t1 , t 2 :
f L (t1 ) − 1125 MHZ = 30 − 1MHZ f L (t 2 ) − 1125MHZ = 30 + 1MHZ
f L3 j = 300 − 125 / 2 − 100 + ( j + 0.5)31.25 MHZ , j = 0,L 3
分别为:153.125MHZ,184.375MHZ,215.625MHZ,246.875MHZ 2)在第一层中通过 0 信道,因为: 2223MHZ -1050MHZ=1173MHZ ∈[950MHZ,1450MHZ] 通带 在第二层中通过 1 信道,因为: 1173MHZ-837.5MHZ=335.5MHZ ∈[237.5MHZ,362.5MHZ] 通带 在第三层中通过 3 信道,因为: 335.5MHZ-246.875MHZ=88.625MHZ ∈ [84.375MHZ,115.625MHZ] 频率估计:
编码: int
0.784 × 2π 0.25π
= 6 ,为 110
测频编码由高到低为:0001110。
§2.4 信道化接收机
一.基本工作原理 1.多波道接收机 P31 Fig2-17 各信道彼此交叠,覆盖测频范围 2.纯信道化接收机 P32 Fig2-18 (1)波段分路器 (2)本振器组、混频、中放、检波、检测 (3)再分波段 (4)分辨力
k
例 某信道化接收机测频范围为[2GHZ,4GHZ] ,采用 4×3 结构,试求:1)频率分辨力和各 级接收机设计;2)若有 2223MHZ 信号进入,求其在接收机中的传输信道和频率估计 解:1) ∆f = (4000 − 2000 ) 4 × 4 × 4 = 31.25MHZ
第一分路器 4,第一中放带宽 ∆f r1 = (4000 − 2000) 4 = 500 MHZ , 第一中频频率 f i1 > (4000 − 2000) 2 ,选为 1200MHZ,第一本振组:
n 比特, ∆f =
∆F , ∆F 测频范围 2n
四.多路鉴相的并行运用: 1.组成 P26 Fig2-13
2.
T——第一路延时线长度 m——每一路量化比特数 n——相邻支路延时时间差 k——并行路数 3.码字校正: (1)频率编码,高位及零点的多余路 (2)低位灵敏,高位不灵敏,用低位校位高位 五.同时到达信号检测
2. 测频范围: ΩRF :测频系统最大可测的雷达信号频率范围 瞬时带宽: ∆f r :任一瞬时可测的频率范围 频率分辨力: ∆f r :所能分开的两个同时到达信号的最小频率差 测频误差: δf
max
=±
1 ∆ pulse : τ cw
a) b)
f L 2 j = f i1 − ∆f r1 / 2 − f i2 + ( j + 0.5)∆f r 2 , j = 0, L m 2 − 1
以此类推:第 k 分路器 m k ,第 k 中放带宽 ∆f rk = ∆f rk −1 / m k , 第 k 中频频率 f ik > ∆f rk−1 / 2 ,第 k 本振组(低外差) :
2.频率快速可靠搜索:
⇒
缺点:可能建立稳定大幅度振荡, v f ↑⇒ 幅度 ↓ 3. 频率搜索概率:
例 某宽带滤波-高中频搜索接收机测频范围为[2GHZ,4GHZ] ,Z=1,被测雷达的脉冲重复周 期 1ms,波束宽度 2°,圆周扫描,周期 5 秒,试求: 1)宽带滤波的通带,中频频率的选择,本振的搜索范围 2)采用频率慢可靠搜索的搜索周期和最窄的接收机带宽 解:1)宽带滤波通带:[2000MHZ,4000MHZ]
f Lkj = f ik −1 − ∆f rk −1 / 2 − f ik + ( j + 0.5)∆f rk , j = 0, L m k − 1
频率分辨力: ∆f = ( f 2 − f 1 )
∏m
k
k
根据接收信号通过的各检测信道 n k , k = 1,2 L 进行频率估计:
fˆ= f 1 + ∑ nk × ∆f rk + ∆f 2
2.2 频率搜索接收机
一.组成 P17 Fig2-2 1.高端:选频 2.中放 3.检波,视放 4.信道: fi = mfl + nfR
m = 1, n = −1, f R = f l − fi ——主信道
m = −1, n = 1, f R = f l + fi ——镜频信道
波形: 0 t1 t2
解得:
t1′ = 0.124 ms ′ = 0.126ms t2
1ms
二.射频调谐的晶体视频接收机 P19,Fig 2-4 1.预选器:调谐作用 2.检波器:脉冲,电平超过门限即认为有信号 3.增加 simin:前选器,后选器 从此向前见赵国庆讲义 三.频率搜索形式: 1. 分类: ;连续,步进,单程,双程 2. 特点:显示,控制 四.搜索速度的选择: a) 频率慢可靠搜索: 搜索概率为 1
f i > (4000 − 2000 )MHZ 2 = 1000 MHZ , 选为 1200MHZ
本振搜索范围:[3200MHZ,5200MHZ] 2)照射时间: Ts = 5 × 2° 360° = 1 36 s ,取 T f = Ts ,由
Tf
∆f r ≥ 1 × 10 −3 4000 − 2000
f L1 j = 2000 − 1200 + ( j + 0.5)500 MHZ , j = 0,L 3
分别为:1050MHZ,1550MHZ,2050MHZ,2550MHZ 第二分路器 4,第二中放带宽 ∆f r 2 = 500 / 4 = 125MHZ , 第二中频频率 f i 2 > 500 / 2 ,选为 300MHZ,第二本振组:
抑制镜频信道:①高中频 ②零中频 ③逻辑判别 5.超外差接收机 P19,Fig2-4 ①窄带超外差 ②宽带超外差 100~200MHz ③宽带预选超外差 例 某超外差搜索接收机测频范围为[1GHZ,2GHZ] ,中频频率 30MHZ ,频率搜索周期 1ms, 中放带宽 2MHZ,试求: 1)本振的频率变换范围和调谐函数 f L (t ) 2)若有频率为 1125MHZ 的连续波信号到达,求视频输出波形 解:1)本振频率变化范围:[1000+30MHZ,2000+30MHZ]
1.二比特量化器 0°~360°四等分, ∆φ = 90 o ∆f / 4 2.多比特:
cos(φ − α ) = cos(α )[ tgα sin φ + cos φ ] sin( φ − α ) = cos(α )[sin φ − tgα cos(φ 0]
α = 45o 时,三比特,8 等分, ∆φ = 45o , ∆f / 8 α = 22.5o 时,四比特,16 等分, ∆φ = 22.5o ∆f / 16
同时信号的分离能力
∆t < 10ns 10ns < ∆t < 120ns
Simin ,D:保证精确测频条件下输入信号功率变化范围
三.技术分类:
搜索频率窗:截获概率,频率分辨力矛盾 频率取样法: 毗邻频率窗:但增加信道数量 相关器:比相法IFM 变换法: FFT : 压缩(SAW ), 声光,DFFT
∆f =
1 = 15.625MHZ 4 2 × 0.5 × 10 −9
3−1 3
2)通过第一迟延支路的相位差:
φ 1 = 2π × 0.5 × 10 −9 × 2.223 × 10 9 = 2π × 1.1115
取模为: 0.1115 × 2π ,编码: int 通过第二迟延支路的相位差:
0.1115 × 2π 0.5π
∆φ 360o , ∆φ = n ——最小的量化单元宽度 2 2 3
量一个信号 2. 技术参数: (1) ∆F = 1 / T
min ,
T min 最短延时线长度
(2) ∆f ,1MHz 频率分辨力 (3) σ f 用统计描述,如均方根法 (4)截获概率时间:当脉冲宽度大于最长延迟线的延迟时间时,对单个脉冲 频率截获概率 → 1 ,原则上讲,频率截获时间为一个脉冲重复周期 (5)simin ,-40~-50dBm, D: 50~60dB (6)同时到达信号处理 (7)测频时间 100~300ns (8)寂静时间 50~70ns 高密度信号环境下的应用受到了限制 例 某比相法瞬时测频接收机测频范围[2GHZ,4GHZ] ,3 路并行运用,相邻迟延比为 4,最长 迟延支路的量化为 3bit ,试求: 1)三路迟延的时间,理论测频精度 2)若有 2223MHZ 信号输入,试求其测频编码输出 解:1) T1 = 1 (4 − 2)10 9 = 0.5ns, T2 = 4T1 = 2ns , T3 = 4T2 = 8ns