基于SolidWorks和ANSYS的机器人手臂性能分析与优化设计
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化一、引言滑移装载机是目前应用较为广泛的一种工程机械,其具有灵活、高效的特点,能够适应不同地形和作业环境的需要。
而作为滑移装载机的重要组成部分之一的机动臂,其结构设计和性能优化对于整个机器的使用效果和使用寿命具有重要的影响。
在机动臂的设计过程中,采用有限元分析方法对其进行分析和优化,能够有效地提高机动臂的性能和使用寿命。
二、机动臂的结构和工作环境滑移装载机的机动臂一般由臂体、臂杆和液压缸等部分组成。
在工作时,机动臂需要承受较大的载荷和振动,因此对于机动臂的结构强度和耐久性有着较高的要求。
由于机动臂在工作过程中需要做出各种角度和位置的调整,因此在设计过程中还需要考虑其动力学性能和运动稳定性。
三、有限元分析的原理和方法有限元分析是一种结构分析的方法,通过将整个结构分割成有限个小单元,然后通过求解每个小单元的力学行为来得到整个结构的响应。
有限元分析技术在工程领域已经得到了广泛的应用,通过对结构进行有限元分析,可以得到结构的应力、位移、振动等性能指标,帮助设计人员优化结构设计。
本文将采用ANSYS软件对滑移装载机机动臂进行有限元分析。
首先需要建立机动臂的三维模型,然后将其网格化,最后通过施加载荷和边界条件,得到机动臂在不同工况下的应力、位移等性能指标。
1.建立机动臂的三维模型在进行有限元分析之前,需要先建立机动臂的三维模型。
通过CAD软件可以建立出相应的三维模型,并将其转换成ANSYS软件可以识别的格式。
2.网格化将三维模型分割成有限个小单元是有限元分析的第一步,也是最关键的一步。
通过ANSYS软件中的网格划分功能,可以将整个机动臂模型分割成有限个小单元,以便后续的分析。
3.施加载荷和边界条件在进行有限元分析之前,需要确定机动臂的工作条件和受力情况,在ANSYS中可以根据实际工况施加相应的载荷和边界条件,然后进行力学分析求解。
4.得到机动臂的应力、位移等性能指标通过有限元分析可以得到机动臂在不同工况下的应力、位移等性能指标,这些指标可以帮助设计人员评估机动臂的结构强度和稳定性,并进行相应的优化。
基于SolidWorks和ANS_省略_自由度焊接机器人的建模与优化设计_袁安富

基于 SolidWorks 和 ANSYS Workbench 的六自由度焊接机器人的 建模与优化设计
53
文章编号: 1004- 2539( 2013) 02- 0053- 05
基于 SolidWorks 和 ANSYS Workbench 的六自由度焊接机器人的 建模与优化设计
杆 Li + 1上的点 Oi + 1作用有力矩 Mi + 1 和力 Fi+ 1, 在连 杆 Li 上作用有自重力 Gi ( 过质心 Ci ) ; ri 和 r+ 分别由 Oi 到 Oi + 1和 Ci 的向径, 如图 2 所示。
图 2 杆件之间的静力传递
按静力学方法, 把这些力、力矩简化到 Li 的固联
py = d 6s23 c 4s 5- d 6c 23 c5+ d4 c 23+ a3s23+ a2s2
nz = - s4 c5 c 6+ c 4s6
oz = s4 c5 s6+ c 4 c6
az = - s4 s5
( 10)
因此
- ( s4 s6d 4- s5 c6 a3- c 4c 6d6+ c 4 c5 c 6d4+
不同, 实际焊接时的轨迹频繁变动。 ( 3) 仿真技术。机器人在研制、设计和试验过程
中, 经常需要对其运动学、动力学性能进行分析以及进 行轨迹规划设计, 而机器人又是多自由度、多连杆空间 机构, 其运动学和动力学问题十分复杂, 计算难度和计 算量都很大。若将机器人作为仿真对象运用计算机图 形技术、CAD 技术和机器人学理论在计算机中形成几 何图形, 并动画显示, 然后对机器人的机构设计、运动 学正反解分析、操作臂控制以及实际工作环境中的障 碍避让和碰撞干涉等诸多问题进行模拟仿真, 这样就 可以很好地解决研发机器人过程中出现的问题。
ANSYS结构优化在起重臂设计中的应用研究

ANSYS结构优化在起重臂设计中的应用研究随着工程技术的不断发展,结构优化在各种工程领域中得到了广泛的应用。
起重臂设计作为机械设计领域中的重要分支,在应用中也面临着一系列挑战,包括重量减轻、强度提高、结构稳定性等问题。
在这些问题中,ANSYS结构优化技术具有着独特的优势,能够帮助工程师设计出更加优化的起重臂结构,提高其性能和效率。
一、ANSYS结构优化技术概述ANSYS是世界领先的工程仿真软件提供商,其结构优化技术能够帮助工程师对复杂结构进行优化设计,并有效地解决工程问题。
结构优化技术主要包括拓扑优化、形状优化、尺寸优化和拓扑尺寸优化等方法。
通过这些方法,工程师可以优化设计出更加轻量化、强度更高的结构,提高结构的性能和效率。
二、起重臂设计中的挑战起重臂是起重机的重要部件,负责吊装和搬运重物。
在起重臂设计中,通常需要考虑结构的重量、强度、刚度和稳定性等问题。
同时,起重臂通常工作在恶劣环境下,需要考虑结构的耐久性和可靠性。
因此,起重臂设计中面临着一系列挑战,需要工程师综合考虑多个方面因素来设计出最优的结构。
三、ANSYS结构优化在起重臂设计中的应用在起重臂设计中,工程师可以利用ANSYS结构优化技术来优化设计结构。
首先是拓扑优化,通过优化结构的拓扑形状,可以有效地减轻结构重量、提高结构强度和刚度。
其次是形状优化,通过优化结构的形状,可以进一步提高结构的性能和效率。
此外,还可以通过尺寸优化和拓扑尺寸优化等方法来优化设计起重臂的尺寸和结构布局,提高结构的工作效率和稳定性。
四、结论在起重臂设计中,ANSYS结构优化技术能够帮助工程师设计出更加优化的结构,提高其性能和效率。
通过结构优化技术,工程师可以优化设计结构的拓扑形状、形状、尺寸和布局,从而实现结构轻量化、强度提高、工作效率和稳定性等目标。
因此,ANSYS结构优化技术在起重臂设计中具有着重要的应用价值,有助于解决工程实际中面临的挑战,推动起重臂设计技术的发展。
机器人手臂运动学分析与优化

机器人手臂运动学分析与优化随着工业自动化的不断深入,机器人手臂已经成为工业制造中不可或缺的一部分。
机器人手臂能够完成机械化生产过程,提高生产效率、优化生产结构、实现生产信息化,为企业减少成本、提高生产效益、提升产品质量和降低缺陷率等方面带来了许多好处。
然而,机器人手臂本身的运动学分析与优化依然是关乎机器人手臂生产效率的重要问题。
本文将探讨机器人手臂运动学分析与优化,以期寻求更高效的解决方案。
一、机器人手臂的运动学分析机器人手臂分为完全机械式机器人和电脑控制的电动机器人两种类型。
不同类型的机器人手臂有着不同的动作学分析方法。
完全机械式机器人的运动学分析主要通过构建机器人手臂的运动学模型来完成,而电脑控制的电动机器人则需要通过进行无电量的建模杆件,再构建其运动方程组,以计算机辅助的方法解出机器人手臂的动作。
在机器人手臂运动学分析中,需要考虑到以下几个方面的运动特性:1. 关节角度:机器人手臂的每个关节都有一定的角度范围,可以通过关节角度的设定来确定机器人手臂的运动。
2. 关节速度:机器人手臂的关节速度与角度有直接关系。
在不同生产环境中,机器人手臂的最大关节速度是不同的。
3. 关节加速度:关节加速度是机器人手臂运动的另一个重要参数。
过大的关节加速度会造成机器人手臂失去平衡,从而导致机器人失效。
4. 工作半径:机器人手臂的工作半径直接决定其能够处理的最大物体尺寸。
工作半径过小则会导致机器人手臂无法操作大型物体,从而影响生产效率。
5. 所需空间:机器人手臂所需空间与其所操作的物体尺寸和数量有关。
过大的机器人手臂在狭小的生产场地中操作会十分困难,而过小的机器人手臂则会限制到生产效率的提高。
以上五个方面都会影响机器人手臂的运动学特性。
我们需要通过分析机器人手臂的运动学特性,来确定如何优化其运动学特性,以达到更高效的效果。
二、机器人手臂的运动学优化机器人手臂的运动学优化主要集中在如何提高机器人手臂的运动特性,来达到更快、更准确的运动效果。
基于ANSYS Workbench的搬运机械手结构优化设计

基于ANSYS Workbench的搬运机械手结构优化设计
谢志江;孙玉;李诚;倪卫
【期刊名称】《机械与电子》
【年(卷),期】2010(000)001
【摘要】分别利用Pro/E和ANSYS Workbench软件对搬运机械手进行三维实体建模与动静态特性分析,并通过形状优化分析设计对比了2种截面结构优化方案,确定使用空心方形截面结构.不仅提高了机械手的低阶固有频率,避免了共振的产生,还提高了机械手的刚度和强度,为结构的改进提供了可靠的参考依据.
【总页数】3页(P65-67)
【作者】谢志江;孙玉;李诚;倪卫
【作者单位】重庆大学机械传动国家重点实验室,重庆,400030;重庆大学机械传动国家重点实验室,重庆,400030;重庆大学机械传动国家重点实验室,重庆,400030;重庆大学机械传动国家重点实验室,重庆,400030
【正文语种】中文
【中图分类】TP241
【相关文献】
1.基于Pro/E和Ansys Workbench的搬运机械手设计与优化 [J], 刘洋; 邢建国; 王龙杰
2.基于ANSYS Workbench的激光器壳体结构优化设计 [J], 马新强; 成巍; 任远; 何建群; 吴明伟
3.基于ANSYS Workbench的磨床床身结构分析与优化设计 [J], 王开德; 韩凯凯
4.基于Ansys Workbench的高速连接器端子结构优化设计 [J], 肖文;霍柱东;孙望
5.基于ANSYS Workbench的压力容器结构尺寸优化设计 [J], 徐亚东
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ANSYS WORKBENCH的六自由度工业机器人摆动臂静力学分析与模态分析
收稿日期:2018-03-27基金项目:山西机电职业技术学院院级课题《基于ANSYS 的六自由度工业机器人研究》的阶段性成果(JKY-18006)作者简介:陈继文(1990 -),男,河南登封人,助教,硕士研究生,研究方向为机器人应用、超细水雾对瓦斯煤尘 爆炸的影响等。
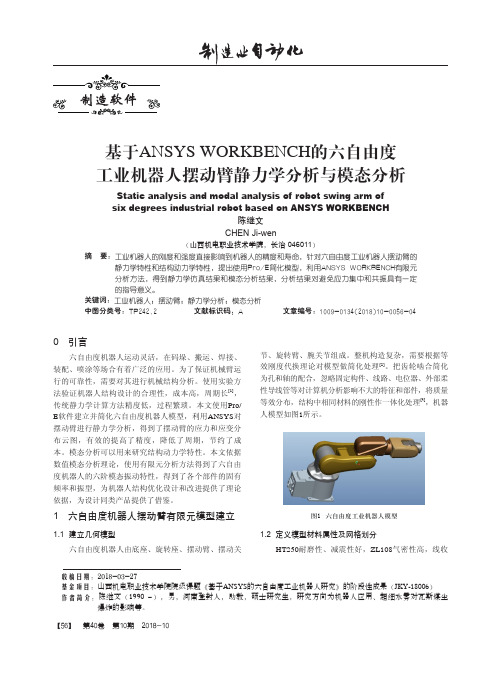
基于ANSYS WORKBENCH 的六自由度工业机器人摆动臂静力学分析与模态分析Static analysis and modal analysis of robot swing arm of six degrees industrial robot based on ANSYS WORKBENCH陈继文CHEN Ji-wen(山西机电职业技术学院,长治 046011)摘 要:工业机器人的刚度和强度直接影响到机器人的精度和寿命,针对六自由度工业机器人摆动臂的静力学特性和结构动力学特性,提出使用Pro/E简化模型,利用ANSYS WORKBENCH有限元分析方法,得到静力学仿真结果和模态分析结果,分析结果对避免应力集中和共振具有一定的指导意义。
关键词:工业机器人;摆动臂;静力学分析;模态分析中图分类号:TP242.2 文献标识码:A 文章编号:1009-0134(2018)10-0056-040 引言六自由度机器人运动灵活,在码垛、搬运、焊接、装配、喷涂等场合有着广泛的应用。
为了保证机械臂运行的可靠性,需要对其进行机械结构分析。
使用实验方法验证机器人结构设计的合理性,成本高,周期长[1],传统静力学计算方法精度低,过程繁琐。
本文使用Pro/E 软件建立并简化六自由度机器人模型,利用ANSYS 对摆动臂进行静力学分析,得到了摆动臂的应力和应变分布云图,有效的提高了精度,降低了周期,节约了成本。
模态分析可以用来研究结构动力学特性。
本文依据数值模态分析理论,使用有限元分析方法得到了六自由度机器人的六阶模态振动特性,得到了各个部件的固有频率和振型,为机器人结构优化设计和改进提供了理论依据,为设计同类产品提供了借鉴。
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析
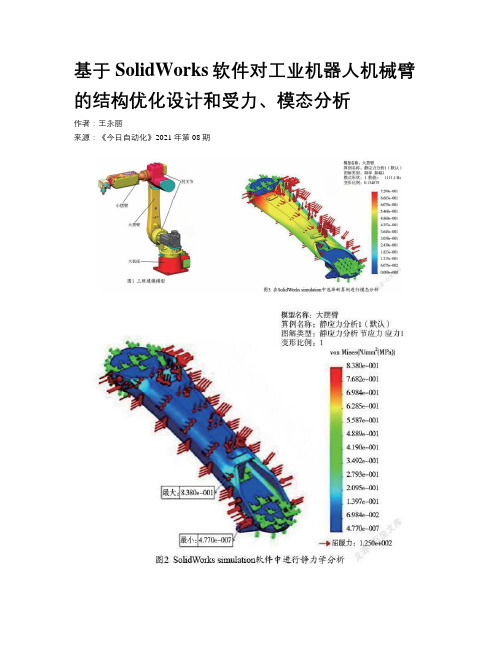
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析作者:王永丽来源:《今日自动化》2021年第08期[摘要]随着现在软件技术的发展,三维建模、仿真软件越来越普及化,SolidWorks软件由其界面操作简单、功能强大被机械设计行业广泛应用,采用SolidWorks软件对某工业机器人机械臂的三维模型结构进行拓扑优化设计,采用SolidWorks simulation软件对机械臂进行静力学、模态仿真分析,几何清理和网格划分,通过计算,设计出较合理的肘关节减速机传动齿轮;达到了工业机器人机械臂高精度柔性运动,机械臂高强度、刚度、最小安全系数和减小应力集中的效果,解决了工业机器人机械臂的优化设计。
[关键词]SolidWorks;工业机器人;机械臂; 仿真分析; 优化设计[中图分类号]V279 [文献标志码]A [文章编号]2095–6487(2021)08–0–03[Abstract]With the development of software technology, three-dimensional modeling and simulation software are becoming more and more popular. SolidWorks software is widely used in mechanical design industry because of its simple interface operation and powerful function. SolidWorks software is used to optimize the topology of the three-dimensional model structure of anindustrial robot manipulator, and SolidWorks simulation software is used to optimize the statics and dynamics of the manipulator Through modal simulation analysis, geometric cleaning and mesh generation, a more reasonable transmission gear of elbow reducer is designed through calculation; It achieves the effect of high-precision flexible motion, high strength, stiffness, minimum safety factor and reducing stress concentration of industrial robot manipulator, and solves the optimization design of industrial robot manipulator.[Keywords]SolidWorks; industrial robot; robot arm; simulation analysis; optimal design工业机器人机械手臂由三部分组成,分别是机械部分、传感部分、控制部分。
基于ANSYS的滑移装载机动臂有限元分析与优化
基于ANSYS的滑移装载机动臂有限元分析与优化滑移装载机(Skid Steer Loader,简称SSL)是一种具有滑移机械驱动的装载机,它可以实现全方位的转向和运动,在工程建设、道路维护和农业等领域具有广泛的应用。
滑移装载机的动臂是其重要的工作机构之一,负责承载和操作各种工具和装置。
为了确保滑移装载机动臂的可靠性和安全性,需要对其进行有限元分析与优化。
需要对滑移装载机动臂进行三维建模。
利用CAD软件,绘制出滑移装载机的动臂的几何形状和结构,并生成相应的三维模型。
该模型应包含动臂的各个零部件,如臂体、油缸、连接杆等。
接下来,使用ANSYS软件对滑移装载机动臂进行有限元分析。
有限元分析是一种基于离散法的结构力学分析方法,可以对结构进行应力和变形的计算和分析。
根据滑移装载机动臂的结构和工作条件,确定相应的负载情况,如静力负载、动力负载等。
将这些负载施加到动臂的相应位置上,并进行有限元网格划分和边界条件的设置。
然后,对模型进行求解,并得到动臂的应力和变形分布。
根据有限元分析的结果,对滑移装载机动臂进行优化。
根据分析结果,确定哪些部位的应力和变形超过了许用范围,对这些部位进行改进和优化。
可以采用增加材料厚度、改变截面形状、增加支撑结构等方法来提高动臂的结构刚度和强度。
在进行优化时,还需要考虑与其他部件的配合性、动作灵活性和生产成本等因素。
进行模拟验证和实验验证。
根据优化后的动臂设计,利用ANSYS软件进行模拟验证,即将优化后的动臂模型放入工作环境中,重新施加负载并进行有限元分析。
对模拟结果进行评估,并与实际测试结果进行对比。
如果模拟结果与实际结果相符,则可以认为优化后的动臂设计是可靠的。
如果有差异,则需要对设计进行再次优化。
基于ANSYS的滑移装载机动臂有限元分析与优化是一项复杂而又重要的工作。
通过该分析与优化,可以提高滑移装载机动臂的结构安全性和可靠性,为滑移装载机的使用提供有力的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
・48・ 机器人技术 机械 2009年第12期 总第36卷———————————————收稿日期:2008-12-22基金项目:成都市科技攻关项目(08GGZD089GX -007)基于SolidWorks 和ANSYS 的机器人手臂性能分析与优化设计赵伟1,殷国富1,陈航1,周晓军2(1.四川大学 制造科学与工程学院,四川 成都 610065;2.成都广泰实业有限公司,四川 成都 610165) 摘要:在国内外工业机器人的研究基础上,针对机械手的结构特点和性能要求,采用基于SolidWorks 的三维建模和基于ANSYS 的结构性能分析相结合的方法,对所开发的50 kg 工业机器人大臂进行了性能分析和结构优化设计,对解决产品结构性能设计中存在的问题、缩短产品设计周期具有指导意义,改变了传统工业机器人的设计方面的局限性,一定程度上丰富了工业机器人的设计方法。
关键词:SolidWorks ;ANSYS ;机械手;结构分析;优化设计中图分类号:TP241,TP391.77 文献标识码:A 文章编号:1006-0316 (2009) 12-0048-03Property analysis and structure optimization of robotic arm based on SolidWorks and ANSYSZHAO Wei 1,YIN Guo-fu 1,CHEN Hang 1,ZHOU Xiao-jun 2(1.School of Manufacturing Science and Engineering ,Sichuan University ,Chengdu 610065,China ;2.Chengdu Great Industrial co. Ltd.,Chengdu 610165,China)Abstract :On the basis of national and international industrial robot’s study productions. Given the sturcture and properties requirements of the manipulator, 3D modeling and performance analysis based on the SolidWorks and ANSYS were utilized to optimize the dimension as well as the structure of 50 kg industrial robotic arms which were newly developed. These two methods efficiently resolve the problem during the product design processing and greatly shorten the design period.It solves the problem of limited design and increases industrial robot’s design methods to a certain extent. Key words :SolidWorks ;ANSYS ;robotic arm ;structural analysis ;optimization机器人技术在现阶段是一种前沿技术,它与生物技术、大型计算机技术、纳米技术等一起被认为是未来科技发展的方向。
工业机器人是一种集人工智能、计算机、电子通信、机械制造等先进技术于一体的自动化装备。
广泛应用于现代化生产中的自动化生产线上,很大程度地提高了生产效率。
机械手臂是机器人的一个重要组成部分,一直是研究的重点,但是机械手臂的结构设计不是一个唯一性设计。
现在世界上一些先进的机器人制造厂商,如瑞典ABB 、日本FANUC 和Yaskawa ,德国KUKA 等公司都设计出了具有各自特色的机器人手臂,并且都形成系列化的产品。
国内工业机器人的研发、生产尚处于行业初期,还没有形成商品化、系列化。
机械手臂的结构设计大多采用相似设计,处于经验设计阶段,其结构的合理性、科学性没有理论依据,致使设计出来的机械手臂,一方面可能存在局部结构太结实、手臂的重量和惯量增加的问题,给机械手的运行带来负面影响,另一方面,局部结构的强度可能又不够,影响整体刚度,并有可能在使用中提前损坏。
为了验证机械手臂结构设计的合理性,就必须生产样机,再做大量强度试验来验证,然后再对结构进行改进,之后才能小批生产形成商品,这样使整个开发周期延长,开发成本也相应增加。
本文以三维建模软件SolidWorks 和有限元分析软件ANSYS 相结合,进行了机械手臂的三维设计机械2009年第12期 总第36卷机器人技术 ・49・和有限元分析。
旨在对50 kg负载机器人的研究分析的基础上,以此作为平台,从而有可能实现产品的系列化、标准化,从而提高产品的设计效率,缩短产品的设计周期,降低成本,为企业在激烈的市场竞争中赢得时间。
1 机械手臂的三维实体建模方法SolidWorks是基于Windows平台开发的智能型高级CAD/CAM/CAE组合软件,使用Windows OLE 技术、直观式设计技术、先进的parasolid内核以及良好的与第三方软件的集成技术,已经成为全球装机量最大的软件。
现代工业机器人的重复定位精度一般都能够达到0.4 mm以内,所以在机械手臂的设计上必须要考虑的是减轻机械手臂的重量、并且要保证机械手臂的刚度,即在设计的时候要考虑静刚度和动刚度,从而有效减轻机械手臂的振动。
由于机械手臂本身的结构特点,还要考虑以后导入ANSYS后的数据衔接问题,因此在建模的过程中要考虑ANSYS建模的习惯。
模型在建立的过程中大量使用草图功能,用草图生成各种模型的基本结构,然后辅助以拉伸、旋转、切除等方法生成实体,从而提高了效率、缩短了设计周期。
在做ANSYS分析的时候把模型做了适当的简化,如果形体过于复杂,把模型导入ANSYS软件中时,会出现一些实体结构无法识别,造成网格划分的困难或者分析结果不收敛,从而影响分析精度。
对于机械手臂的设计,从能实现基本功能的最简单结构开始,然后根据有限元分析结果,对受力大的部位进行加强、对不受力的部位减少材料,这也体现出CAD建模和有限元分析各自的优点,他们的结合无疑可以大大提升设计效率。
图1为某六自由度工业机器人的大臂简图,该机器人要实现的主要功能是抓取、搬运、放置工件及焊接等,可以极大满足多种工业加工需要,其有效运动行程达2 m。
图1 机械手臂简化模型2 机械手臂性能的有限元分析方法SolidWorks自带的分析插件COSMOS Xpress 可以进行有限元分析,但是它只支持对固态单实体零件的分析,不支持对装配体、表面模型或多实体零件的分析,而且它的约束形式单一,仅限于面约束,同时载荷的施加形式也过少,对于一些特殊的载荷形式,比如非均布载荷以及作用于点或线的载荷都无法进行施加,因而无法处理很多工程实例。
ANSYS提供了与各种CAD软件的专用接口,其自带的图形接口能识别IGES、ParaSolid、CATIA、Pro/E、UG 等标准文件。
IGES是一种被普遍接受的中间标准格式,可以在不同的CAD和CAE系统之间交换几何模型。
ANSYS的IGES输入能力在工业界是最强的,而且,因为过滤器程序可以输入部分文件,所以至少可以输入模型的一些部分。
本文以ANSYS 9.0和SolidWorks 2006为例,将SolidWorks的模型数据进行简化后导入ANSYS 中进行有限元分析。
由于IGES文件在导入的时候经常会出现丢面或者多面、多线等情况,导致在后面的处理过程中进行网格划分、添加约束和添加受力的时候出现不可解决的错误,导致分析无法进行,所以在一般分析零件的时候能够简化的就应当尽量简化以减少ANSYS可能会产生的错误。
在进行网格划分前必须设置材料属性,选择单元类型Solid 92,材料的杨氏模量E=205 GPa,弹性模量为0.3。
网格划分是建模中非常重要的一个环节,网格划分的好坏将直接影响计算结果的准确性和计算进度,甚至会因为网格划分不合理而导致计算不收敛。
根据该实体的结构特点、载荷类型以及分析的需要,网格划分尺寸应不大于实体的最小壁厚值。
最后采用自由网格划分的方法进行网格的划分。
图2为划分网格后的机械手臂。
图2 简化后的机械手臂机械手一端通过螺栓与RV减速器相连,RV减速器再与伺服电机相连从而实现机械手臂的转动,所以整个运动过程中的受力都在螺栓连接上;机械・50・ 机器人技术 机械2009年第12期 总第36卷手另一端要承受拿取重物、往复运动的受力。
因此选取受力最大的一个位置,也就是水平位置对大臂进行受力分析,在右端圆台上开出一小块平面,有助于施加载荷。
3 结果分析和结构优化由图3、图4可以看出,该大臂结构受力最大在大臂螺栓连接处和直杆与圆盘相接处,所以该实体的危险处就是RV减速器与大臂连接螺栓处。
因此可以考虑优化的结构是,根据RV减速器的型号相应增加螺栓个数以分担受力,在两个形体结合处增加缓冲设计以减少应力集中,在一些受力比较轻的地方减少材料以减轻整个大臂的质量,从而可以降低伺服电机功率增加经济性和稳定性。
图3 大臂位移等值线图图4 大臂等效应力等值线图图5是优化后的分析图,可以看出在两个分型面处增加了缓冲设计,极大减小了应力集中,并且在手臂不受力的中间部位增加了凹槽,极大减轻了模型的重量,在前端受力处增加了一个加强筋,增加了材料减薄后的强度。
在最基本受力分析后就可以根据产品的实际需要增加其它辅助部件,结合控制部件等优化外形,形成产品的最终设计。
4 结论通过实例阐述了利用三维建模软件SolidWorks 建立实体模型以及其与有限元分析软件ANSYS的对接,从而成功地对实体模型进行了结构分析,找出了其薄弱环节并提出了相应的改进建议,从而大大的提高了设计效率,缩短了设计周期,降低了设计成本,也为一些没有实际设计经验的人员提供了一种直观的方法。
图5 优化后的等效应力等值线图参考文献:[1]刘国良. SolidWorks 2006完全自学手册[M]. 北京:科学出版社,2006.[2]龚振帮. 机器人机械设计[M]. 北京:电子工业出版社,1995.[3]于殿勇,李瑞峰,等. 120 kg负载工业机器人的开发[J]. 高技术通讯,2002,(6):81-84.[4]段全心,殷玉枫,刘中. 基于ANSYS的滚珠轴承离合器应力分析[J]. 现代制造工程,2008,(1):91-93.[5]周惠明. 关节型机械手的结构创新设计[J]. 煤矿机械,2007,(10).[6]张瑾. 基于Pro/E和ANSYS的阀门实体建模与有限元分析[J]. 石油矿场机械,2008,(1):47-49.[7]常宗瑜,陈秉聪. 水下机器人-机械手系统的动力学分析[J]. 机械,2006,33(4):4-6.(上接第47页)二次开发主要采用Grip、VC、VB等编程语言实现,通过二次开发,可控制局域网内所有用户的UG软件界面、快捷键一致,从而使编程技术人员在网内任意用户电脑上都能按自己习惯的方式操作软件而不会影响编程速度。