约束法求解方法
收敛─约束法原理及其在隧道设计中的应用

收敛─约束法原理及其在隧道设计中的应用收敛─约束法原理及其在隧道设计中的应用摘要:约束法是一种结构设计方法,它使用一组约束条件来确定结构定义空间内的最优设计。
本文介绍了约束法的原理,提出了一些实施约束法的基本技术,并介绍了它在隧道设计中的应用。
最后,本文介绍了一种收敛的约束法技术,它可以实现更好的隧道设计。
关键词:约束法;隧道;设计;收敛1. 绪论约束法是一种结构设计方法,它将结构的设计要求转化为一组约束条件,这些约束条件决定了结构定义空间的范围和局限性,以及结构设计的最优解。
约束法已经广泛应用于结构设计领域,尤其在隧道设计中,它可以更有效地帮助结构设计师完成设计任务。
本文通过介绍约束法的原理、实施技术和在隧道设计中的应用,以及提出一种新的收敛的约束法技术,旨在为结构设计提供更好的方法。
2. 约束法原理约束法的实施是将结构设计要求转化为一组约束条件,这些约束条件决定了结构定义空间的范围和局限性,以及结构设计的最优解。
由于约束条件的存在,在设计空间中只有满足所有约束条件的设计才能被认为是最优解。
约束法的实施通常包括以下几个步骤:(1)确定设计要求,即确定所要设计的结构的功能要求;(2)定义约束条件,将设计要求转化为确定结构定义空间的一组约束条件;(3)计算设计参数,根据约束条件计算出最优解;(4)验证设计参数,通过分析和验证这些参数以确定其是否满足设计要求。
3. 实施约束法的基本技术约束法的实施需要使用一些基本技术,以使设计过程更加高效。
(1)设计参数空间的确定根据设计要求,首先需要确定结构定义空间的范围,这是在实施约束法之前的必要步骤。
在定义这些空间时,设计师需要考虑到与结构设计有关的所有因素,如功能要求、成本、环境条件和材料性能。
(2)约束条件的定义一旦确定了结构定义空间的范围,就可以定义约束条件,这些约束条件对结构定义空间的范围和局限性具有决定性作用,并确定出结构设计的最优解。
(3)设计参数的计算在定义了约束条件后,就可以根据这些约束条件来计算出最优解。
8点法求对极约束

8点法求对极约束在计算机视觉领域,对极约束是指在两个图像中的对应点通过极线相互对应的约束关系。
而8点法则是一种常用的求解对极约束的方法,下面将详细介绍8点法求对极约束的步骤和原理。
一、对极约束的定义和作用对极约束是计算机视觉中用来约束两幅图像中的对应点的关系。
在一对立体图像中,两幅图像的相机内参已知,而相机外参未知。
对极约束描述了两幅图像中对应点之间的关系,即两个对应点所在的光线必须经过摄像机光心。
利用对极约束,可以通过已知的对应点来计算相机的外参,从而实现三维重建等计算机视觉任务。
二、8点法求对极约束的原理8点法是一种常用的求解对极约束的方法。
它的基本思想是通过至少8个对应点的像素坐标来计算出基础矩阵,从而求解相机的外参。
基础矩阵是一个3×3的矩阵,它可以通过两幅图像中的对应点来描述两幅图像之间的几何关系。
三、8点法求对极约束的步骤1. 收集至少8个对应点的像素坐标。
2. 根据对应点的坐标,构建一个8×9的矩阵A,其中每一行对应着一个对应点的约束关系。
3. 对矩阵A进行奇异值分解(SVD),得到矩阵A的最小奇异值对应的奇异向量,将其变为3×3的矩阵F。
4. 对矩阵F进行约束处理,使其满足秩为2的条件。
5. 对矩阵F进行归一化处理,得到最终的基础矩阵。
6. 利用基础矩阵,可以求解相机的外参,实现三维重建等计算机视觉任务。
四、8点法求对极约束的优缺点8点法是一种简单快速的求解对极约束的方法,其优点包括:1. 不需要知道相机的内参,只需要对应点的像素坐标即可。
2. 可以通过至少8个对应点来求解基础矩阵,求解过程相对简单。
3. 可以应用于各种不同的相机模型和图像类型。
然而,8点法也存在一些缺点:1. 由于只需要至少8个对应点,所以对应点的质量要求较低,容易受到噪声和误匹配的影响。
2. 由于只有一个解,所以对应点的分布要求较为均匀,不能有太多重复的点。
3. 对于非共面的对应点,8点法的精度可能较低。
拉格朗日乘子法等式约束

拉格朗日乘子法等式约束拉格朗日乘子法是一种用于求解等式约束问题的优化方法。
它的基本思想是通过引入拉格朗日乘子,将等式约束问题转化为无约束的优化问题,从而找到约束条件下的最优解。
使用拉格朗日乘子法求解等式约束问题的步骤如下:首先,将原始问题转化为带等式约束的优化问题。
设目标函数为f(x),约束条件为h(x)=0,其中x为待求解的向量。
我们的目标是找到满足约束条件的x,使得f(x)达到最小或最大。
然后,构造拉格朗日函数L(x,λ),其中λ为拉格朗日乘子。
拉格朗日函数的定义为L(x,λ)=f(x)+λ⋅h(x)。
通过引入拉格朗日乘子,我们将原始问题中的等式约束转化为了拉格朗日函数的约束条件。
接下来,求解拉格朗日函数的极值。
我们将拉格朗日函数对x和λ分别求偏导,并令其为零,得到一组方程组。
通过求解这组方程组,可以得到x和λ的值。
最后,检验解的有效性。
将求解得到的x代入原始问题的约束条件中,检验是否满足等式约束。
如果满足,则求解得到的x为原始问题的最优解;如果不满足,则需要重新进行求解。
总的来说,拉格朗日乘子法是一种有效的求解等式约束问题的方法。
通过引入拉格朗日乘子,我们可以将等式约束转化为无约束的优化问题,从而找到最优解。
在实际应用中,拉格朗日乘子法被广泛应用于经济学、物理学、工程学等领域,为解决复杂的等式约束问题提供了有力的工具。
通过使用拉格朗日乘子法,我们可以灵活地处理等式约束问题,并求解出最优解。
它的应用范围非常广泛,可以用于解决各种工程、经济和物理等领域的优化问题。
在实际应用中,我们需要结合具体问题,合理选择合适的目标函数和约束条件,才能得到准确的结果。
在使用拉格朗日乘子法求解等式约束问题时,我们需要注意以下几点:首先,需要确保目标函数和约束条件是可微的;其次,需要求解得到的解是否为局部最优解还是全局最优解;最后,需要对求解结果进行验证,确保满足等式约束。
综上所述,拉格朗日乘子法是一种求解等式约束问题的优化方法。
基于Pro E的渐开线齿轮的精确建模方法

摘要摘要本文基于Pro/E的渐开线齿轮的精确建模方法,利用了Pro/E强大的参数化设计功能,建立复合渐开线齿轮的参数化通用模型,设计新的齿轮时,直接输入齿轮的各项参数即可,则可自动生成齿轮。
复合齿轮是具有内外啮合的复杂模型,本文在圆柱直齿轮的基础上,根据内齿轮加工工艺,对内齿进行整体快速建模,避免了重复建模和衍生误差,提高了精度且利于后期处理。
另外本文还进行了齿轮的装配,且利用Pro/E中的Mechanism模块,对齿轮进行机构运动仿真,并对其测量结果进行了分析,制作了直观的传动动画。
关键词:复合齿轮渐开线参数化建模机构运动仿真ABSTRACTABSTRACTThis paper described the accurate modeling method based on Pro / E involute gear,Established Generic model of the parameters of the composite involute gear using of powerful parametric design capabilities of Pro / E. when produced the new gear, we only needed to input the parameters of the new gear directly, and it could be generated gear automatically.The composite gear is a complexity model with internal and external meshing gear .On the basis of the spur gear, according to the process of the internal gear, the modeling was created overall rapidly. The method avoided modeling Repeatedly and appearing derivative errors, It could improve the accuracy and be helpful to the post-processing .Otherwise, the article also introduced the assembly ,and utilized the Mechanism module in the Pro / E conducted the mechanism motion simulation of the gear . We analyzed the measurement results, produced intuitive animation.Key words: composite gear involute line parametric modeling mechanism motion simulation目录目录第一章绪论 (1)1.1P RO/E参数化建模简介 (1)1.1.1参数介绍 (1)1.1.2关系的介绍 (2)1.2研究目的 (4)1.3研究现状 (5)1.3.1齿轮建模现状 (5)1.3.2参数化设计研究现状 (6)1.4本课题研究内容 (7)第二章软件介绍 (9)2.1P RO/E概述 (9)2.2P RO/E特点 (9)2.3P RO/E在参数化方面的优势 (11)2.4本章小结 (12)第三章渐开线齿轮的介绍 (13)3.1齿轮渐开线的生成原理 (13)3.1.1渐开线的数学描述 (13)3.1.2渐开线的参数方程 (14)3.2齿轮啮合特性 (14)3.3渐开线标准齿轮的基本参数和几何尺寸 (15)3.3.1渐开线齿轮的基本参数 (15)3.2.2渐开线齿轮各部分的几何尺寸 (15)3.4基于P RO/E渐开线齿轮三维建模及参数设计思想 (16)3.4.1参数化建模的基本原理 (16)3.4.2齿轮三维建模的思路 (16)基于P ro/E的复合渐开线齿轮精确建模方法3.5齿轮参数化建模的设计流程 (17)3.6本章小结 (17)第四章复合齿轮参数化建模 (19)4.1渐开线复合齿轮相关参数的确定 (19)4.2渐开线复合齿轮P RO/E实现 (20)4.2.1 绘制外啮合齿轮 (20)4.2.2 绘制内啮合齿轮 (29)4.3齿轮装配及仿真 (33)4.3.1创建箱体 (33)4.3.2齿轮装配及运动机构仿真 (35)4.4本章小结 (41)第五章总结 (42)致谢 (43)参考文献 (44)1第一章绪论第一章绪论1.1 Pro/E参数化建模简介参数化设计是Pro/E重点强调的设计理念。
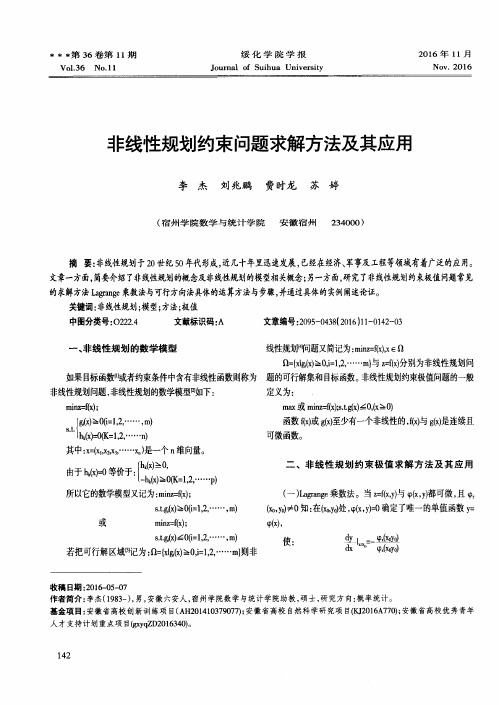
非线性规划约束问题求解方法及其应用
令
则
一 f , ( x o , y o )
,
y o ) + ( x 0 , y o ) = 0
求的极小点; 否则, 从( x ㈣开 始继续迭代, 到满足精度要求结 则在 ‘ P ( x , y ) = 0的前提条件下 , 目 标 函数 = f ( x , y ) 在点( ) ( 0 , 束 , 称此方法为可行方向法。 y 0 ) 有极值的必要条件为】 【 I ) ’ ) L 满足方 程组: 若x ∞ 点的有效约束集叫E 空, 利用下述不等式组来确定
第 3 6卷 第 1 1 期
V0 1 . 3 6 NO . 1 1
绥 化 学 院 学 报
J o u na r l o f Su i hu a Un i v e r s i t y
2 0 1 6年 1 1月
NO V .2 01 6
非线性规划约束 问题求解ห้องสมุดไป่ตู้法及其应用
其中: x = ( x J , x x …- . x ) 是一个 n 维向量。
。 等 {
或
2 , … . p )
所以它的数学模型又记为: m i n z - f ( x ) ;
s . t . & ( x ) 0 ( i = 1 2…一 , m ) m i n z = f ( x ) ; s . t . g  ̄ ( x ) L O ( i = l , 2 , ……, m )
f ( x ) 0 ( i = l , 2 , ……, m ) t h k ( x ) - o  ̄= 1 , 2 , ……n )
函数 f ( l x ) 或g ( x ) 至少有一个非线性的, f ( x ) 与g ( x ) 是连续且 可微函数。 二 、非 线 性 规 划 约 束 极 值 求解 方 法及 其 应 用
带约束条件的欠定方程求解
带约束条件的欠定方程求解
假设我们有一个欠定方程组Ax=b,其中A是一个m×n的矩阵(m<n),x是一个n维向量,b是一个m维向量。
由于m<n,所以
这个方程组是不完全确定的,即方程的数量少于未知数的数量。
为
了使方程有解,我们需要引入一个约束条件,通常是一个关于未知
向量x的附加条件。
在数学上,我们可以使用最小二乘法来求解带约束条件的欠定
方程。
最小二乘法的基本思想是通过最小化误差的平方和来求解方程,即找到一个x,使得||Ax-b||^2最小。
当引入约束条件后,我
们需要考虑如何在满足约束条件的情况下,使得误差的平方和最小。
除了最小二乘法,还有其他方法可以用来求解带约束条件的欠
定方程,比如拉格朗日乘子法、广义逆等。
这些方法在不同的情况
下都有其适用性和局限性。
在工程领域,带约束条件的欠定方程求解常常用于信号处理、
控制系统设计、数据拟合等问题中。
在物理学中,这种方法可以用
来处理测量误差、参数估计等。
在经济学中,它可以用来分析市场
行为、经济预测等。
总之,带约束条件的欠定方程求解是一个具有挑战性和实际应用价值的数学问题,它需要我们结合数学理论和实际问题,寻找合适的方法来求解不完全确定的方程组,并且在满足约束条件的情况下,得到合理的解。
运筹学-约束最优化方法
若AT的各个行向量线性无 关.根据Kuhn-Tucker条件, 在该线性规划的最优点y* 处存在乘子向量x*≥0,使得
即Ax*=b 对偶规划约束条件 及(ATy*-c)T x*=0 线性规划互补松弛条件
29
5.1.3 一般约束问题的最优性条件
定理1.3.1 在上述问题中,若 (i)x*为局部最优解, 有效集I*={i|ci(x*)=0,i∈I}; (ii)f(x),ci(x)(1≤i≤m)在x*点可微; (iii)对于i∈E∪I*, 线性无关, 则存在向量l*=(l1*,· · · ,lm*)使得
解:本问题是求点(1,1)T到如图三角形区域的最短 距离.显然唯一最优解为x*=(1/2,1/2)T.
19
例题(Fritz-John条件)
min f(x)=(x1-1)2+(x2-1)2 s.t. c1(x1,x2)=(1-x1-x2)3≥0 c2(x)=x1≥0 c3(x)=x2≥0 即
35
惩罚函数法
惩罚是手段,不是目的
KT条件中li*ci(x*)=0 称为互补松弛条件. 它表明li*与ci(x*)不能 同时不为0.
28
线性规划情形
对于线性规划问题 min f(y)=-bTy s.t. -ATy≥-c 其中 y∈Rm,A∈Rm×n, b∈Rm,c∈Rn 问题有n个约束条件. 各个约束条件关于y 的梯度为-AT的行向 量(-pi).
借助于Farkas引理,可推出存在li*≥0(i∈I*), 使得
类似与Fritz-John条件的证明,可以证明KuhnTucker条件. 有效约束函数的梯度线性无关称为KuhnTucker约束规范. 如果该约束规范不满足,最优点不一定是KT点.
拉格朗日约束条件求极值

拉格朗日约束条件求极值拉格朗日乘数法是一种求解约束问题的方法,它通过添加一个拉格朗日乘数来将约束条件转化为限制条件,从而得到极值问题的一组等价的条件和方程。
具体来讲,我们设要求解的函数为f(x),经过变换后它的约束条件为g(x)=0。
此时,我们可以将约束条件转化为一个限制条件,即加入拉格朗日乘数k来把f(x)和g(x)结合起来,即构造一个新函数L(x,k)=f(x)+k*g(x)。
接下来我们利用这个新函数的极值条件来求解x的最优解,从而实现优化求解。
根据拉格朗日乘数法的理论,我们需要先对L(x,k)分别对x和k求偏导,然后将偏导数等于零,解出x和k的值,从而获得最优解。
具体来讲,我们有以下步骤:1. 构造新函数L(x,k)=f(x)+k*g(x)2. 对L(x,k)分别对x和k求偏导数,得到以下的两个方程组:∂L/∂x=∂f/∂x+k*∂g/∂x=0∂L/∂k=g(x)=03. 解方程组,得到x和k的取值:∂f/∂x+k*∂g/∂x=0k=-∂f/∂g/∂x4. 将解出的x和k代入原函数f(x),求得函数的最优值。
需要注意的是,用拉格朗日乘数法求解约束问题时,一定要确认约束条件的充分性条件是否满足。
如果约束条件不满足,或者充分条件不满足,则拉格朗日乘数法会出现不可行解或无界解等问题。
因此在实际应用中,我们需要严格考虑约束条件是否满足,并使用其他方法来进行调整和特化,以保证求解的正确性和高效性。
总之,拉格朗日乘数法是一种非常有用的约束问题求解方法,它能够通过加入拉格朗日乘数来将约束条件转化为限制条件,从而实现高效的求解和优化。
在实际应用中,我们需要综合考虑问题的约束条件、充分性条件和求解方法,从而进行权衡和调整,以得到最优的求解结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
约束法求解方法
约束法求解方法通常是指通过设定一些约束条件,将问题简化为一个优化问题,然后使用各种优化算法进行求解。
这种方法在许多领域都有应用,例如计算机图形学、机器学习、运筹学等。
在约束法求解中,最重要的步骤是设定合适的约束条件。
这些条件可以根据问题的特性来设定,例如,在机器学习中,可以根据已知的训练数据来设定一些约束条件,使得求解的模型能够更好地拟合训练数据。
一旦约束条件设定好,就可以使用各种优化算法进行求解。
常见的优化算法包括梯度下降法、牛顿法、遗传算法等。
这些算法可以在一定的时间内找到最优解或近似最优解。
约束法求解方法的一个重要特点是它可以处理大规模的问题。
由于约束条件的引入,可以将问题分解为多个子问题,从而可以并行处理这些子问题,提高求解效率。
需要注意的是,约束法求解方法也存在一些限制。
例如,有时候设定的约束条件可能会引入新的噪声或偏差,影响最终的求解结果。
此外,对于一些复杂的问题,可能难以找到合适的约束条件或优化算法进行求解。
总之,约束法求解方法是一种有效的解决问题的方法,它可以处理大规模的问题,提高求解效率。
但在使用这种方法时,需要注意设定合适的约束条件和选择合适的优化算法。