一种简单快速的相机标定新方法
摄像机标定 方法

摄像机标定方法摄像机标定是计算机视觉领域的一项重要任务,主要目的是确定摄像机的内外参数,以便将图像中的像素坐标转换为世界坐标。
摄像机标定有多种方法可供选择,其中包括使用标定物体、使用棋盘格、使用角点等。
下面将详细介绍其中的几种方法。
第一种方法是使用标定物体进行摄像机标定。
该方法需要摄像机拍摄带有已知尺寸的标定物体,例如固定尺寸的棋盘格或标尺。
通过测量图像中标定物体的像素坐标和已知尺寸,可以计算出摄像机的内外参数。
这个过程通常涉及到图像坐标和世界坐标的转换,以及通过最小二乘法进行参数求解。
第二种方法是使用棋盘格进行摄像机标定。
这种方法是比较常用且简单的一种标定方法。
首先,在摄像机拍摄的图像中绘制一个棋盘格,然后使用摄像机内参数和外参数将棋盘格的世界坐标与图像坐标建立对应关系。
通过采集多幅图像并测量每幅图像中的棋盘格角点的像素坐标,可以得到摄像机的内外参数。
这个过程通常使用角点检测算法来自动检测图像中的棋盘格角点。
第三种方法是使用角点进行摄像机标定。
这种方法也是比较常用的一种标定方法。
和使用棋盘格类似,该方法也是通过摄像机内参数和外参数将角点的世界坐标与图像坐标建立对应关系。
角点通常是由几条直线的交点或者是物体的尖锐边缘。
通过采集多幅图像并测量每幅图像中的角点的像素坐标,可以得到摄像机的内外参数。
这个过程通常也使用角点检测算法来自动检测图像中的角点。
除了上述几种常用方法,还有其他一些比较新颖的摄像机标定方法。
例如,基于模板匹配的方法可以在不需要标定物体的情况下估计摄像机的内外参数。
这种方法需要摄像机拍摄多幅图像,并在每幅图像中定位模板。
通过比较模板在不同图像中的位置,可以估计摄像机的内外参数。
此外,还有基于结构光的方法和基于手眼标定原理的方法等。
总之,摄像机标定是计算机视觉领域的一项重要任务,有多种不同的方法可供选择。
使用标定物体、棋盘格、角点等进行摄像机标定是常见的方法。
这些方法可以通过采集多幅图像并测量像素坐标,计算摄像机的内外参数。
有哪些相机标定的方法

有哪些相机标定的方法
一、基于投影矩阵的标定法
投影矩阵法是最传统的一种标定方法,是根据投影机的几何模型,引入投影方程,用投影矩阵对相机参数进行标定的方法。
它的优点是,标定结果可以得到较高的精度,而且对图像没有任何偏置。
二、基于半误差的标定方法
半误差法是一种比较新的标定方法,它提出了相机参数可以从一组测量点(即半误差的形式)中估计出来的想法。
它的优点是基于实验数据,更容易操作,而且能够从一组测量点中更准确地估计出相机参数。
三、基于深度学习的标定方法
深度学习是近年来发展较快的一个领域,它可以从图像中学习和提取特征,并将其应用于复杂的相机标定任务中。
它的优点是可以从图像中直接提取特征,而不需要手动生成正确的模型,从而大大减少了编程复杂度。
- 1 -。
一种相机标定方法

一种相机标定方法
相机标定是指根据摄影机的内部和外部参数,确定摄影机所拍摄物体的三维坐标与图像上的二维坐标之间的准确关系。
一种常见的相机标定方法是使用相机标定板。
相机标定板是一个具有已知尺寸和模式的平面板,通常是由方形或圆形的黑白格子组成。
标定板应该放置在静止的平面上,并且位于摄像机的整个视场中。
以下是一种相机标定的步骤:
1. 摄像机采集图像:在标定板上采集多张图像。
这些图像应该涵盖摄像机可能使用的不同位置和角度。
2. 提取标定板角点:利用图像处理技术,如角点检测算法,从图像中提取标定板的角点。
角点是标定板格子交叉点的位置。
3. 标定板角点的三维坐标:通过测量标定板的实际尺寸,可以确定标定板角点的三维坐标。
4. 相机参数估计:使用相机模型和标定板角点的二维-三维对应关系,通过最小化重投影误差的优化算法,估计出相机的内部参数(如焦距、主点位置)和外部参数(如旋转和平移矩阵)。
5. 校正和验证:根据估计出的相机参数,对标定板图像进行校正,使得图像中的物体位置和标定板上的物体位置能够精确对应。
通过检查校正结果的准确性和稳定性,可以验证相机标定的质量。
相机标定方法可以根据具体的应用和需求进行调整和改进,但以上步骤是一个基本的相机标定流程。
棋盘格标定原理

棋盘格标定原理棋盘格标定是计算机视觉中常用的一种标定方法。
在计算机视觉领域中,图像的大小和像素数量都非常重要。
为了获得准确的测量结果,需要对相机进行标定。
其中,棋盘格标定法是一种可靠的标定方法,能够精确地确定相机的内部参数和外部参数。
棋盘格标定原理是基于相机成像原理的。
相机成像原理是指在相机内部,图像是由光线通过透镜成像形成的。
在相机内部,有两个重要的参数需要标定:相机内部参数和相机外部参数。
相机内部参数是指相机内部的透镜、CCD等元件的参数。
这些参数包括焦距、主点位置、畸变等。
这些参数对于图像的几何形状和尺寸有着重要的影响。
相机外部参数是指相机拍摄时相机的位置和方向。
这些参数对于图像的位置和角度有着重要的影响。
棋盘格标定法是一种通过拍摄棋盘格图案来确定相机内部参数和外部参数的方法。
棋盘格是一种黑白相间的方格图案,可以通过计算机视觉算法进行检测和识别。
拍摄棋盘格图案时,需要注意以下几点:1.棋盘格需要摆放在一个平面上,不能有明显的弯曲和变形。
2.拍摄时需要保证相机和棋盘格的位置和角度不变,可以通过固定相机和棋盘格的位置来实现。
3.需要保证棋盘格图案的清晰度和对比度,可以通过调整光线和相机参数来实现。
拍摄到棋盘格图案后,可以通过计算机视觉算法来检测棋盘格图案,并计算相机内部参数和外部参数。
具体步骤如下:1.通过计算机视觉算法检测棋盘格图案,得到棋盘格的角点坐标。
2.通过求解相机的内部参数,包括焦距、主点位置、畸变等参数。
3.通过求解相机的外部参数,包括相机在空间中的位置和方向。
4.通过对相机的内部参数和外部参数进行优化和校正,得到准确的相机参数。
棋盘格标定法是一种简单、可靠、精确的相机标定方法。
它可以广泛应用于计算机视觉、机器人视觉、虚拟现实、增强现实等领域。
棋盘格标定法的优点是标定过程简单,标定结果准确可靠,但同时也有一些缺点,比如标定过程需要大量的计算,并且需要专业的计算机视觉算法知识。
棋盘格标定法是一种重要的相机标定方法,能够精确地确定相机的内部参数和外部参数。
halcon自标定方法
halcon自标定方法Halcon自标定方法Halcon是一种常用的机器视觉软件,用于开发和实现各种图像处理和机器视觉应用。
在机器视觉领域,相机的标定是非常重要的一步,它能够精确地确定相机的内部参数和外部参数,从而提高图像处理的精度和准确性。
Halcon提供了自标定方法,使相机的标定过程更加简便和高效。
自标定方法基于相机的特征点,通过在图像中检测和匹配特征点来确定相机的内部参数和外部参数。
下面将详细介绍Halcon的自标定方法。
1. 特征点提取在自标定过程中,首先需要从图像中提取特征点。
Halcon提供了多种特征点提取算法,如Harris角点检测、SIFT算法等。
根据实际应用场景的需求,选择合适的算法进行特征点提取。
2. 特征点匹配特征点提取后,需要进行特征点的匹配。
Halcon提供了多种特征点匹配算法,如基于描述子的匹配算法、基于相似性变换的匹配算法等。
通过计算特征点之间的相似性,确定它们之间的对应关系。
3. 相机标定特征点匹配完成后,即可进行相机的标定。
Halcon提供了基于特征点的标定方法,通过求解相机的内部参数和外部参数,得到相机的准确标定结果。
标定过程中需要提供已知的标定板,通过测量标定板上的特征点坐标和图像中对应特征点的像素坐标,计算相机的内部参数和外部参数。
4. 标定结果评估标定过程完成后,需要对标定结果进行评估。
Halcon提供了多种评估方法,如重投影误差、畸变系数等。
通过对比实际观测值和标定结果的差异,评估标定的准确性和精度。
5. 标定结果应用标定结果可以应用于各种机器视觉应用中,如图像校正、目标检测和跟踪等。
通过应用标定结果,可以提高图像处理和机器视觉算法的准确性和稳定性。
总结:Halcon的自标定方法是一种简便高效的相机标定方法,通过特征点提取和匹配,求解相机的内部参数和外部参数,从而实现对相机的准确标定。
标定结果可以应用于各种机器视觉应用中,提高图像处理和算法的准确性和稳定性。
相机标定方法及技巧分析

相机标定方法及技巧分析相机标定是计算机视觉领域中的一项重要技术,它通过矫正相机的非线性畸变和确定相机的内部参数和外部参数,从而提高图像处理和计算机视觉应用的精度和稳定性。
本文将对相机标定的方法和技巧进行详细的分析。
1. 相机标定的基本概念相机标定是指确定相机的内参和外参的过程。
其中,内参包括相机的焦距、主点坐标等;外参包括相机在世界坐标系中的位置和朝向。
这些参数在计算机视觉任务中被广泛应用,例如三维重建、目标跟踪等。
2. 相机标定的方法2.1 标定板法标定板法是目前最常用的相机标定方法之一。
这种方法需要使用一张按照特定规则划分的标定板,在不同的位置和姿态下拍摄多张图像。
通过分析这些图像中的标定板特征点,可以计算出相机的内参和外参。
2.2 归一化法归一化法是一种基于对极几何原理的相机标定方法。
它利用多张不同角度的图像中的相应点的对极约束关系,对相机进行标定。
与标定板法相比,归一化法不需要使用特定的标定板,只需要提供多张具有对应点的图像。
2.3 Kalibr方法Kalibr是一种利用轴承约束进行相机标定的方法。
它通过观察相机在不同角度下对于静态目标的旋转轴承约束,估计相机的内参和外参。
这种方法相对于其他方法,对于非刚性场景和动态场景有更好的鲁棒性。
3. 相机标定的技巧3.1 图像采集要求为了获得准确的相机标定结果,图像采集的质量至关重要。
首先,要确保标定板或特征点在图像中有足够的分辨率。
其次,应避免过曝光和欠曝光的情况,保证图像的亮度均匀。
此外,还需要采集不同角度和距离下的图像,以获得更全面的标定数据。
3.2 标定板的选择对于标定板法,标定板的选择也对标定结果有一定影响。
传统的标定板通常是黑白棋盘格或由黑白相间的圆点组成的棋盘格。
近年来,还出现了更加精确和稳定的标定板,例如纹理丰富的标定板和带有激光二维码的标定板。
选择合适的标定板可以提高标定的精度和鲁棒性。
3.3 多角度标定为了获得准确的相机标定结果,通常需要在多个角度下对相机进行标定。
相机标定拍摄方法
相机标定拍摄方法相机标定是计算机视觉中的重要任务,它主要是通过确定相机的内部参数和外部参数来将图像中的物体从二维图像坐标变换到三维世界坐标,从而实现对物体的精确测量和三维重构。
相机标定的关键是通过拍摄特定的标定板或者标定物体来获取一组已知的图像特征点,并利用这些特征点进行参数估计。
以下是一种常见的相机标定拍摄方法,包括准备工作、标定板的选择、图像采集、特征提取和参数估计等步骤。
准备工作:1.确保相机处于稳定的状态,并解除相机上的自动设置,如自动对焦、自动曝光和自动白平衡等。
2.准备一个标定板或者标定物体,要求表面上具有明显的特征,如棋盘格、圆点阵列或灰度平面等。
3. 安装相机标定软件或库,如OpenCV,以便进行后续图像处理和参数估计。
标定板的选择:1.标定板的尺寸应该足够大,以填满相机视野中的大部分区域。
2.标定板的形状和特征应该容易检测和提取。
3.标定板的材质和颜色应该与实际应用场景保持一致,以确保标定结果在实际应用中的准确性。
图像采集:1.将标定板放置在相机视野内,确保标定板平面与相机成像平面平行。
2.对相机进行适当的调整,以使标定板的特征点在图像中呈现出良好的分辨率和对比度。
3.拍摄一系列包含标定板的图像,尽量覆盖不同的角度、距离和姿态。
特征提取:1.对于棋盘格标定板,利用图像处理算法提取棋盘格角点,得到图像中的特征点坐标。
2.对于其他类型的标定板,如圆点阵列或灰度平面,同样利用图像处理算法提取特征点坐标。
参数估计:1.利用提取到的图像特征点坐标和已知的标定板或物体的实际尺寸,进行相机内部参数的估计,如焦距、畸变系数和主点偏移等。
2.利用估计的相机内部参数和图像特征点坐标,进行相机的外部参数估计,如相机位置和姿态。
相机标定的最终目标是得到精确的相机内外参数,以便在应用中实现准确的物体测量和三维重构。
标定结果可以用于矫正图像畸变、进行物体测量和姿态估计等任务。
需要注意的是,相机标定过程中的数据采集和图像处理需要一定的专业知识和经验。
摄像机标定的几种方法
摄像机标定的几种方法摄像机标定是计算机视觉和图像处理中非常重要的一环,它是通过对图像上已知几何形状的目标进行测量和分析,从而确定摄像机的内参和外参参数的过程。
摄像机标定的目的是为了减小或排除摄像机和图像采集设备的误差,使得图像处理和计算机视觉算法能够更精确地分析和处理图像。
目前,摄像机标定有多种方法,可以根据不同的需求和场景选择适合的方法。
下面将介绍常见的几种摄像机标定方法。
1.二维标定方法二维标定方法是最简单的一种方法,它可以通过对图像中已知平面上的特定点进行测量和分析来确定摄像机的内参参数。
这种方法适用于单目摄像机的标定,通常使用棋盘格或者三维坐标系的特征点标定图像。
2.三维标定方法三维标定方法是一种比较常用的摄像机标定方法,它可以通过对场景中已知三维点和其在图像中的投影进行测量和分析,确定摄像机的外参参数。
通常使用标定板或者特殊形状的物体作为标定点,通过测量物体在图像中的位置和姿态来确定摄像机的外参参数。
3.立体标定方法立体标定方法适用于双目摄像机或者多目摄像机的标定,它可以通过对左右两个摄像机图像中的已知点进行测量和分析,确定摄像机的内参和外参参数。
立体标定方法通常使用立体标定板或者多个标定点,通过匹配左右图像中对应点的位置和姿态来确定摄像机的内参和外参参数。
4.鱼眼镜头标定方法鱼眼镜头标定方法适用于鱼眼摄像机的标定,它可以通过对鱼眼图像中的已知点进行测量和分析,确定摄像机的内参和畸变参数。
鱼眼镜头标定方法通常使用特殊的标定板和算法,通过减少或者消除鱼眼镜头的畸变效果来提高图像的质量和准确性。
5.自动标定方法自动标定方法是一种通过计算机算法自动计算和确定摄像机内参和外参参数的方法。
这种方法通常使用特殊的标定板或者标定物体,通过分析图像中的特征点和线条等信息来确定摄像机的内参和外参参数。
总结:摄像机标定是计算机视觉和图像处理中重要的一环,有多种方法可选。
常见的摄像机标定方法包括二维标定、三维标定、立体标定、鱼眼镜头标定和自动标定方法等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Key words:circular point;imaged absolute conic;camera calibration
doi:10.3969/j.issn.1007—130X.201 1.01.017
中图分类号:TP391
文献标识码:A
· 收稿日期:2010—06—1 7;修订日期:2010—09—14 基金项目:国家f1然f{节琏台资助项目(∽8731 79);深圳f苻科技计期摹础研究项目(JC200903180630A) 通讯地址:361005福建肯哽¨f仃厦f】大学海韵园}}研:q-偻402室 Addrerb:Room 402..'k'tennfic Research Budding 2.Halyun Campus.Xiamen University.Xiamen.Fujian 361005.P.R.China
90
万方数据
^
雾≤
≮/
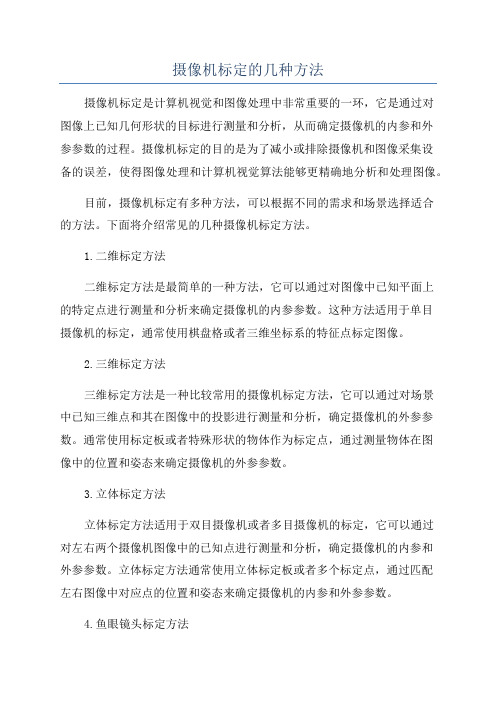
图3本文使用的标定模板
P.
图4本文使用的标定模板的投影
直线B7C 7交消隐直线f。于P7.。根据射影几 何[1 s]的知识,一条线段被它的中点和这条直线上
的无穷远点调和分离,故这4个共线点B7、C7、D7 和P’,的交比为一1,即:
(B’C’,D’P 71)=一1
(5)
由于摄像机的透视变换具有保持交比不变的
在射影变换的作用下,研。和研。仍是共轭点。 可以由实部和虚部分别为0得到关于K吖K叫的 两个约束,故若有一定数目的圆环点像点即可线性 求解K1Ji(~。
2.3单应性矩阵
不失一般性,我们假设模板平面在世界坐标系 的X_y平面,即模板平面方程为Z一0。记旋转矩 阵R第i列为r。。从方程(1)我们有:
X
y
2 标定原理
2.1针孔相机成像模型
摄像机的基本成像模型是针孔模型,本文采用 该模型。它的成像基础是中心投影(或透视投影)。 三维空间中的一点M一(X,Y,Z)7在图像上的投 影点聊一(z。Y)7为光心与M点的连线与图像平 面的交点。厨一(X,Y。Z,t)7和痢=(工。Y,f)7分 别表示点M和m的齐次坐标。在齐次坐标系下, 三维点M和它的投影点棚间的投影关系町以表 示如下:
88
万方数据
1 引言
相机标定是从二维图像恢复i维信息至荚莺 要的一步,需要杯定的参数包括摄像机内参数和外 参数。摄像机内参数描述棚机成像的几何特征,摄 像机外参数描述相机相对于f址界坐标系的方向和 位置。
迄今为止,在相机标定方面已经做r很多的工 作,摄像机标定的理论问题已得到较好的解决。对 于摄像机标定的研究来说,当fjl_『研究工作集中在针 对具体的实际应用nq题。采J}J特定的简便、实用、快 速和准确的标定方法。目前的这些工作可以大致 分为两类。第一类方法不使用标定参照物,仅利用 摄像机在运动过程中感知到的周围环境的图像与 图像之问的对应关系对摄像机进行标定,通常称之 为自标定¨’3 3。它又可以分为:基于自动视觉的摄 像机自标定技术(基于平移运动的自标定技术和基 于旋转运动的自标定技术),利用本质矩阵和基本 矩阵的自标定技术,利用多幅图像之间的直线对应 关系的摄像机自标定方法,以及利用火点和通过弱 透视投影或平行透视投影进行摄像机标定等。另 一类方法是通过观察标定物来恢复物体的度埴结 构,确定摄像机内参数。该方法要求标定物的三维 几何结构已知。
本文提出一种新的标定方法,该方法耍求相机 在3个(或3个以七)不同方佗摄取一个包含其内 接正三角形的网的新喇标定模板的|冬I像。与传统 方法不I叫的是,该方法避免了复杂的椭嘲拟合和汽
万方数据
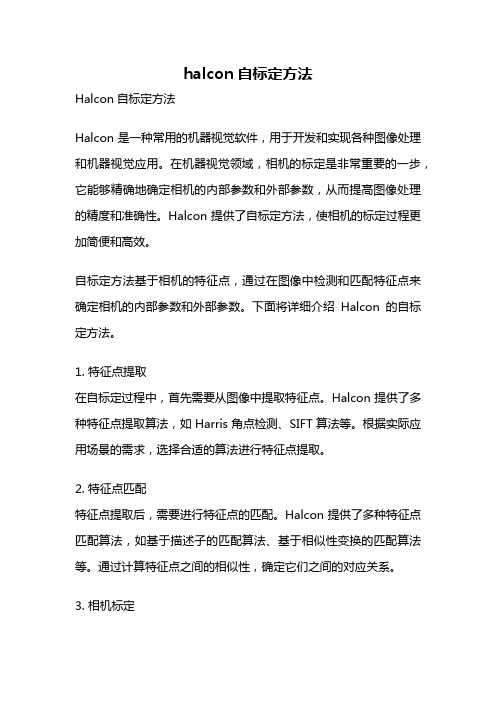
图1 张方法使用的标定模板
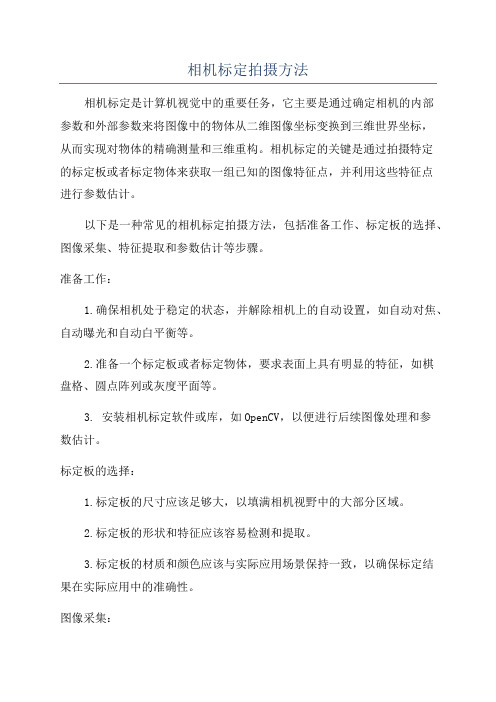
人≯. ≮◇
图2孟方法使用的标定模板 线拟合。降低了计算的复杂度,提高了标定速度。对 噪声更加鲁俸。此外,标定过程既不需要模板的任 何物理度量,也不要建立模板及其图像上点的对 应,标定过程很简单、易于操作。实验结果验证了 该方法的有效性。
张正友^提出一种j}J平面模板(如图l所示) 代替传统标定物的有效标定方法。首先通过移动 摄像机或模板,获得3个(或3个以上)不同方化的 模板图像,然后确定模板及其图像E点的对应,计 算出图像和模板之fhJ的嗨应性矩阵.进而求解摄像 机内参数。但是,该方法需要确定模板E点阵的物 理坐标以及l冬l像和模板之问的点的匹配.这给使用 者带来4i便。盂晓桥。“61等人提出r一种新恻的定 标模板(如图2所示),一个圆和通过圆心的若干直 线。该方法要求3个(或3个以t)不问方位的模 板I冬I像,即町线性求解伞部摄像机内参数。此外, 它遵循嘲环点标定的思路,给出r多种类剐的模板 均适用于标定的结论‘71。f}j是,标定的精度强烈依 赖于椭圆和A线拟合的准确度,而儿拟合过程也很 耗时。此外。还有很多其他标定模板“12j,包括两 个同心圆、两个平行圆和三个)乓面吩I等。
刘碧霞-.2。李绍滋L3。郭锋1‘3。苏松志h3
LIU Bi-xial一。LI Shao-zil.一。GU0 Fen91-v,SU Song-zhil·3
(1.厦门大学智能多媒体技术实验室智能科学系,福建厦门361005; 2.厦门大学计算机科学系,福建厦f-I 361005;
3.厦门大学福建省仿脑系统重点实验室。福建厦f-1 361005) (1.Intelligent Multimedia Technology Labo啊tory,Delmrtment of Cognitive Science,Xiamen University,Xiamen 361005; 2.Department of Computer Science。School of Information Science and Technology-Xiamen University。Xiamen 361005;
,.3 f]
=p
吃妇
O
七舯…z ]●●●j
曰㈨ 1
r
因此,模板平面上的点M和它的像点m之间的关
系可以通过单应性矩阵H表示如下:
旆一//M,日一Airl ffz f]
(4)
从上式我们可知单应性矩阵在相差一个非零常数
因子的意义下是相等的。
3 相机标定
3.1 圆环点像点的推导
本文提出的新标定模板如图3所示,其中△A7 B’C 7是圆O’的内接正三角形。直线A 7F 7通过圆 o’的圆心交圆o 7于点F 7。直线C,G 7通过圆o 7的 圆心与圆交于点G’。D7是B 7C7的中点,且B7C7上 A 7F 7。E7是A 7B 7的中点,且A’B 7上c,G 7。标定模 板的图像如图4所示,直线BC、AF、AB和CG与 消隐直线的投影分别交于点P。、P:、P。和P.。
降s“o] 鲡=K[R t3而.K—f 0 fo t,。l (1)
L-o o 1 j
其中,k是任何非零尺度因子。[R f]表示摄像机 外参数,其中R是3×3的旋转矩阵。t表示从世界 坐标系到稍I机坐标系的平移向鲢,K表示摄像机外 参数。其中(U。.u。)是主点坐标,^和厂。分别表示 z轴和Y轴方向的尺度因子,s表示关于两个坐标 系的畸变。 2.2 圆环点和绝对二次曲线(IAC)
然后通过得到的圆环点像点坐标,可线性求解摄像机内参数。与传统方法不同的是,该方法避免了复杂的 椭圆拟合和直线拟合,降低了计算复杂度,提高了标定速度和精度,对噪声更加鲁棒。此外,该方法中的标 定过程不需要模板的任何物理度量,也不要建立模板及其图像上点的对应,标定过程简单易于操作。基于
模拟和真实图像的实验验证了该方法的有效性和鲁棒性。
在三维射影夺间中,我们把满足t=0的点称
89
为无穷远点,所有无穷远点构成了无穷远平面k。 在无穷远平面上满足M7M一0的点构成了绝x寸-- 次曲线n。。。不难验证绝对二次曲线的投影 (IAC)L13]"to是二次曲线,硼=(KK7)_1一K—rK~, 并且与摄像机的方位无关。绝对二次曲线的投影 包含了摄像机内参数的全部信息,如果能够拟合出 绝对二次曲线的投影,那么通过Cholesky[1¨分解, 摄像机内参数矩阵K就可以确定。
一个平面丌与丌。。相交于一条直线,这条直线 称之为这个平面的无穷远直线,记为J。。无穷远 直线与绝对二次曲线口。相交于两个特殊的点C, (1。i,0,0)7和C2(1,一i,0,0)r,它们就是7r的圆 环点。它们的像点m。和7[1z应该落在绝对二次曲 线的投影硼上,于是有:
mTlC-rK mI一0,m歹rⅨ~7n2—0 (2)
3.Fujian Key Laboratory of the Brain-Like Intelligent System-Xiamen University,Xiamen 361005,China)
摘 要:本文提出了一种新的相机自标定方法,该方法要求摄像机在3个(或3个以上)不同方位摄取 一个包含其内接正三角形的圆的新型标定模板的图像。首先,从模板图像中推导得到圆环点的像点坐标;
黼 性 质 有
鼹 (
卜 胛 一 |I 1
同理
㈨岍 ∞
B
rr
=一
)( 一眠 h凹 肥卜= 胛1l
由式(6)和式(7)可以得到P。、P:、P。和P‘ 的值。
C。和c2是绝对二次曲线上的圆环点,它们的 像点分别记作m。和m:,且它们在绝对二次曲线的
投影上。由于C。和c2共轭,在透视投影变化下,
m1和m2仍然是共轭的。根据Laguerre定理n朝 的推论,由于B7C 7上A7F 7,P。、P:被m。和m。调 和分离,即:
CN43—1258/TP ISSN 1007一130X
计算机工程与科学
CoMPUTER ENGlNEERlNG&SClENCE
文章编号:1007~130X(2011)01—0088—06
201 1年第33卷第1期
V01.33,No.1,2011
一种简单快速的相机标定新方法
A New Easy Fast Camera Self——Calibration Technique