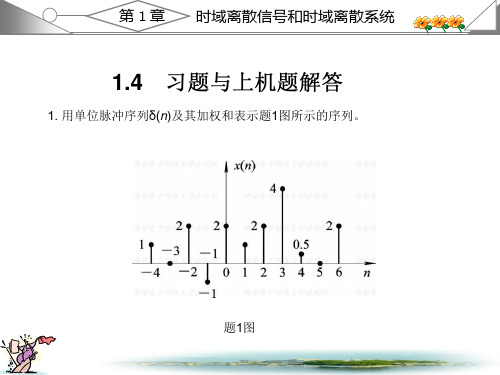
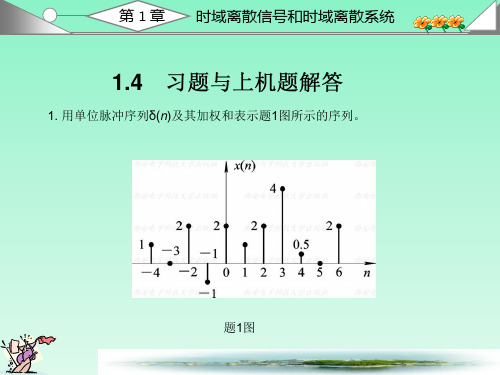
数字信号处理第四章附加题
数字信号处理(第三版)_课后习题答案全_(原题+答案+图)
第 1 章
时域离散信号和时域离散系统
6. 给定下述系统的差分方程, 试判定系统是否是因果稳定系统, 并说明
理由。
1 N 1 N k 0 (2) y(n)=x(n)+x(n+1)
第 1 章
(2) 令输入为
x(n-n0) 输出为
Байду номын сангаас
时域离散信号和时域离散系统
y′(n)=2x(n-n0)+3
y(n-n0)=2x(n-n0)+3=y′(n)
故该系统是非时变的。 由于 T[ax1(n)+bx2(n)]=2ax1(n)+2bx2(n)+3 T[ax1(n)]=2ax1(n)+3 T[bx2(n)]=2bx2(n)+3 T[ax1(n)+bx2(n)]≠aT[x1(n)]+bT[x2(n)] 故该系统是非线性系统。
m
第 1 章
时域离散信号和时域离散系统
题7图
第 1 章
时域离散信号和时域离散系统
y(n)={-2,-1,-0.5, 2, 1, 4.5, 2, 1; n=-2, -1, 0, 1, 2, 3, 4, 5}
第 1 章
解法(二)
时域离散信号和时域离散系统
采用解析法。 按照题7图写出x(n)和h(n)的表达式分别为
n n0 k n n0
|x(k)|≤|2n0+1|M, 因
此系统是稳定的; 假设n0>0, 系统是非因果的, 因为输出
数字信号处理第四章习题

第四章习题4.1 (a) By expanding the equation()()[]()⎥⎦⎤⎢⎣⎡==⎰--∞→∞→2200021T T Ft j T xx T xx dt e t x T E lim F P E lim F 00πΓ taking the expected value, and finally taking the limit as ∞→0T ,show that the right-hand side converges to )(f xx Γ.(b) Prove that2102211)(1)(∑∑-=---+-==N n fn j fm j N N m xx en x N e m r ππ.4.2 For zero-mean, jointly Gaussian random variables, X 1, X 2, X 3, X 4, itis well known that)()()()()()()(3241423143214321X X E X X E X X E X X E X X E X X E X X X X E ++=. Use this result to derive the mean-square value of ()m r xx and the variance, given by()[][]()()()[]∑∞-∞=+-+-≈n xx xx xx xx m n m n n m N N m r γγγ*22varwhich is defined as[][][]22(()(var m r E m r E m r xx xx xx -=. 4.3 By use of the expression for the fourth joint moment for Gaussianrandom variables, show that(a)()()[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡+++=2212122121421)(sin )(sin )(sin )(sin 1f f N N f f f f N N f f f P f P E x xx xx ππππσ (b)[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡++=2212122121421)(sin )(sin )(sin )(sin )()(cov f f N N f f f f N N f f f P f P x xx xx ππππσ(c)[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎭⎫ ⎝⎛+=242sin 2sin 1)(var f N fN f P x xx ππσ under the condition that the sequence ()n x is a zero-mean white Gaussian noise sequence with variance 2x σ.4.4 Generalize the results in Problem 4.3 to a zero-mean Gaussian noiseprocess with power density spectrum )(f xx Γ, as given by()[]()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+Γ=222sin 2sin 1var f N fN f f P xx xx ππ (Hint: Assume that the colored Gaussian noise process is the output of a linear system excited by white Gaussian noise.)4.5 Show that the periodogram values at frequencies,1,1,0,/-==L k L k f k given by (4.1.35), can be computed by passing the sequence through a bank of L IIR filters, where each filter has an impulse response )()(/2n u e n h N nk j k π-= and then computing the magnitude-squared value of the filter outputs at n=N. Note that each filter has a pole on the unit circle at the frequency f k .4.6 The Bartlett method is used to estimate the power spectrum of asignal x(n). We know that the power spectrum consists of a single peak with a 3 dB bandwidth of 0.01 cycle per sample, but we do not know the location of the peak.(a) Assuming that N is large, determine the value of M=N/K so thatthe spectral window is narrower than the peak.(b) Explain why it is not advantageous to increase M beyond thevalue obtained in part (a).4.7 The N-point DFT of a random sequence x(n) is ∑-=-=10/2)()(N n N nk j e n x k X π.Assume that E[x(n)]=0 and E[x(n)x(n+m)]=)(2m w δσ (in other words,x(n) is a white noise process).(a) Determine the variance of X(k).(b) Determine the autocorrelation of X(k).4.8 An AR(2) process is described by the difference equation)()2(81.0)(n n x n x ω+-=, where w(n) is a white noise process withvariance 2ωσ.(a) Determine the parameters of the MA(2), MA(4), and MA(8)models that provide a minimum mean-sequare error fit to thedata x(n).(b) Plot the true spectrum and those of the MA (q), q=2,4,8spectra and compare the results. Comment on how well theMA(q) models approximate the AR (2) process.4.9 An MA (2) process is described by the difference equation )2(81.0)()(-+=n n n x ωω, where w(n) is a white noise process withvariance 2ωσ.(a) Determine the parameters of the AR(2), AR(4), and AR(8)models that provide a minimum mean-square error fit to the data x(n).(b) Plot the true spectrum and those of the AR(p), p=2,4,8, andcompare the results. Comment on how well the AR(p) modelsappoximate the MA (2) process.4.10 The autocorrelation sequence for an AR process x(n) ismxx m ⎪⎭⎫ ⎝⎛=41)(γ (a) Determine the difference equation for x(n)(b) Is your answer unique? If not, give any other possiblesolutions.4.11 Suppose that we represent an ARMA(p,q) process as a cascade ofan MA(q) followed by an AR(p) model. The input-output equation for the MA(q) model is ∑=-=qk k k n w b n v 0)()(, where w(n) is a whitenoise process. The input-output equation for the AR(p) model is∑==-+pk k n v k n x a n x 1)()()((a) By computing the autocorrelation of v(n), show thatq m d b b m mq k m w m k k w vv ≤≤==∑-=+0)(022σσγ(b) Show that 1)()(00=+=∑=a k m a m pk vx k vv γγ4.12 Suppose that the AR(2) process in Problem 4.8 is corrupted by anadditive white noise process v(n) with variance 2v σ. Thus, we havey(n)=x(n)+v(n)(a) Determine the difference equation for y(n) and thusdemonstrate that y(n) is an ARMA(2,2) process. Determinethe coefficients of the ARMA process.(b) Generalize the result in part (a) to an AR(p) process∑=+--=pk k n w k n x a n x 1)()()( and )()()(n v n x n y +=.4.13 The harmonic decomposition problem considered by Pisarenko maybe expressed as the solution to the equationa a a Γa H w yy H 2σ=The solution for a may be obtained by minimizing the quadratic form a Γa yy H subject to the constraint that a a H =1. The constraint can be incorporated into the performance index by means of a Lagrange multiplier. Thus the performance index becomes()a a a Γa H yy H 1-+=λζ.By minimizing ζ with respect to a , show that this formulation is equivalent to the Pisarenko eigenvalue problem given in (4.4.9), with the Lagrange multiplier playing the role of the eigenvalue. Thus,show that the minimum of ζ is the minimum eigenvalue 2w σ.4.14 The autocorrelation of a sequence consisting of a sinusoid withrandom phase in noise is)(2cos )(21m m f P m w xx δσπγ+=where 1f is the frequency of the sinusoidal, P its power, and 2w σthe variance of the noise. Suppose that we attempt to fit an AR(2) model to the data.(a) Determine the optimum coefficients of the AR(2) model as afunction of 2w σ and 1f .(b) Determine the reflection coefficients 1K and 2K correspondingto the AR(2) model parameters.(c) Determine the limiting values of the AR(2) parameters and (1K ,2K )as 02→w σ.4.15 This problem involves the use of cross-correlation to detect a signalin noise and estimate the time delay in the signal. A signal x(n) consists of a pulsed sinusoid corrupted by a stationary zero-mean white noise sequence. That is, 10),()()(0-≤≤+-=N n n w n n y n x ,where )(n w is the noise with variance 2w σ and the signal is⎩⎨⎧-≤≤=otherwise M n n A n y ,010,cos )(0ω. The frequency 0ω is known, but the delay 0n , which is a positiveinteger, is unknown, and is to be determined by cross-correlating x(n) with y(n). Assume that 0n M N +>. Let∑-=-=10)()()(N n xy n x m n y m rdenote the cross-correlation sequence between x(n) and y(n). In the absence of noise, this function exhibits a peak at delay 0n m =. Thus,0n is determined with no error. The presence of noise can lead toerrors in determining the unknown delay.(a) For 0n m =, determine ()[]0n r E xy . Also, determine thevariance ()[]0var n r xy , due to the presence of the noise. In bothcalculations, assume that the double-frequency term averages to zero. That is, 0/2ωπ>>M .(b) Determine the signal-to-noise ratio, defined as []{}[])(var )(020n r n r E SNR xy xy = (c) What is the effect of the pulse duration M on the SNR?。
数字信号处理第四章附加题
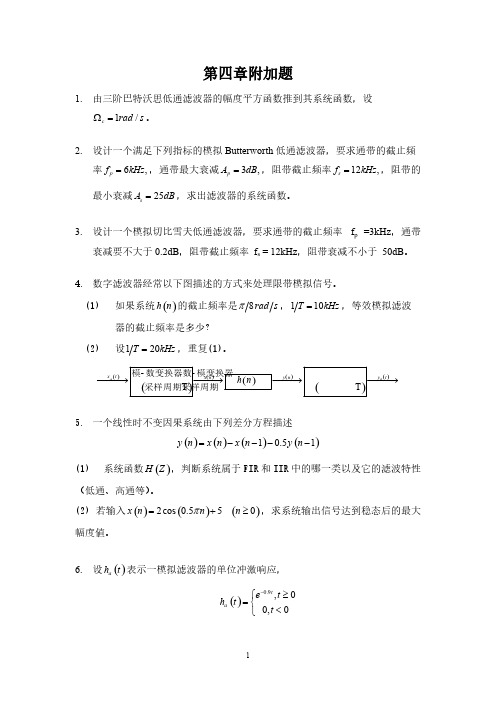
第四章附加题1.由三阶巴特沃思低通滤波器的幅度平方函数推到其系统函数,设。
1/c rad s Ω=2.设计一个满足下列指标的模拟Butterworth 低通滤波器,要求通带的截止频率,通带最大衰减,阻带截止频率,阻带的6,p f kHz =3,p A dB =12,s f kHz =最小衰减,求出滤波器的系统函数。
25s A dB =3.设计一个模拟切比雪夫低通滤波器,要求通带的截止频率 f p =3kHz ,通带衰减要不大于0.2dB ,阻带截止频率 f s = 12kHz ,阻带衰减不小于 50dB 。
4.数字滤波器经常以下图描述的方式来处理限带模拟信号。
(1)如果系统的截止频率是,,等效模拟滤波()h n 8rad s π110kHz =器的截止频率是多少?(2)设,重复(1)。
120kHz =()()()()()()()T T a xt x n y n y t ah n −−−→−−−→−−−→−−−→模-数变换器数-模变换器采样周期采样周期5.一个线性时不变因果系统由下列差分方程描述()()()()10.51y n x n x n y n =----(1) 系统函数,判断系统属于FIR 和IIR 中的哪一类以及它的滤波特性()H Z (低通、高通等)。
(2) 若输入 ,求系统输出信号达到稳态后的最大()()2cos 0.55x n n π=+()0n ≥幅度値。
6.设表示一模拟滤波器的单位冲激响应,()a h t ()0.9,00,0t a e t h t t -⎧≥=⎨<⎩用冲激响应不变法,将此模拟滤波器转化成数字滤波器(表示单位取()h n 样响应,即)。
确定系统函数,并把作为参数,为任何()()a h n Th nT =()H z T T 值时,数字滤波器是稳定的,并说明数字滤波器近似为低通滤波器还是高通滤波器。
7.用冲激响应不变法将以下变换为,抽样周期为T 。
H a (s)H(z)(1)。
数字信号处理 第四章04
同理:∀n1 , 0 ≤ n ≤ L − 1
详见(4-38) P.142
L
M
例:N=12=4×3, M=4 , L=3 算法流图:图4-20,P.144
这是一个蝶形 三点蝶形
这仍然是一个蝶形 四点蝶形
x(n)={x(0), x(1), x(2)…x(11)}
x(0) x(1) x(5) x(9)
= ∑ x( n)WNkn = = =
=
n=0 M −1 L −1
n0 = 0 n1 = 0 M −1 L −1
N −1
x(Mn1+n0)
一列一列 求DFT
= DFTn1 [ x( n1 , n0 )] 0 ≤ k0 ≤ L − 1, ∀n0
∆
n1 = 0
( Mn1 + n0 )( Lk1 + k0 ) x ( n , n ) W ∑∑ 1 0 N Mn1k0 Lk1n0 k0 n0 MLk1n1 x ( n , n ) W W W W ∑∑ 1 0 N N N N
n1 = 0 L −1
n1 = 0,1,..., L − 1
行号
k0 = 0,1,..., L − 1
′ k 0 n0 (3) X 1 (k0 , n0 ) = X 1 (k0 , n0 )WN
0 ≤ k0 ≤ L − 1
0 ≤ n0 ≤ M − 1 (4) ∀k0 , 0 ≤ k0 ≤ L − 1 (针对每一行) M −1 ′ kn ′ X 2 (k 0 , k1 ) = DFTn0 [ X 1 (k 0 , n0 )] = ∑ X 1 (k0 , n0 )WM , k 0 = 0,1,..., M − 1
0 ≤ n0 ≤ M − 1, ∀k
数字信号处理课后习题答案(全)1-7章
第 1 章 时域离散信号和时域离散系统
(6) y(n)=x(n2)
令输入为
输出为
x(n-n0)
y′(n)=x((n-n0)2) y(n-n0)=x((n-n0)2)=y′(n) 故系统是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n2)+bx2(n2) =aT[x1(n)]+bT[x2(n)]
第 1 章 时域离散信号和时域离散系统
题4解图(一)
第 1 章 时域离散信号和时域离散系统
题4解图(二)
第 1 章 时域离散信号和时域离散系统
题4解图(三)
第 1 章 时域离散信号和时域离散系统
(4) 很容易证明: x(n)=x1(n)=xe(n)+xo(n)
上面等式说明实序列可以分解成偶对称序列和奇对称序列。 偶对称序列可 以用题中(2)的公式计算, 奇对称序列可以用题中(3)的公式计算。
(2) y(n)=x(n)+x(nN+1)k 0
(3) y(n)= x(k)
(4) y(n)=x(n-nn0)n0
(5) y(n)=ex(n)
k nn0
第 1 章 时域离散信号和时域离散系统
解:(1)只要N≥1, 该系统就是因果系统, 因为输出 只与n时刻的和n时刻以前的输入有关。
如果|x(n)|≤M, 则|y(n)|≤M, (2) 该系统是非因果系统, 因为n时间的输出还和n时间以 后((n+1)时间)的输入有关。如果|x(n)|≤M, 则 |y(n)|≤|x(n)|+|x(n+1)|≤2M,
=2x(n)+x(n-1)+ x(n-2)
将x(n)的表示式代入上式, 得到 1 y(n)=-2δ(n+2)-δ(n+1)-0.5δ(2n)+2δ(n-1)+δ(n-2)
数字信号处理课后习题答案(全)1-7章
2. 给定信号:
2n+5
-4≤n≤-1
(x(n)=
6
0
0≤n≤4 其它
(1) 画出x(n)序列的波形, 标上各序列值;
(2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列;
第 1 章 时域离散信号和时域离散系统
(3) 令x1(n)=2x(n-2), 试画出x1(n)波形; (4) 令x2(n)=2x(n+2), 试画出x2(n)波形; (5) 令x3(n)=x(2-n), 试画出x3(n)波形。 解: (1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3)
h(n)=2δ(n)+δ(n-1)+ δ(n-2)
由于
x(n)*δ(n)=x(n)
1
x(n)*Aδ(n-k)=Ax(n-k)
2
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ(n-2) 1 2
, 这是2π有理1数4, 因此是周期序
3
(2) 因为ω=
,
所以
1
8
=16π, 这是无理数, 因此是非周期序列。
2π
第 1 章 时域离散信号和时域离散系统
4. 对题1图给出的x(n)要求:
(1) 画出x(-n)的波形;
数字信号处理第4章习题解答教材

DFT [x2 (n)]
DFT {Im[ w(n )]}
1 j Wop (k )
1 2j
[W
((k )) N
W
* (( N
k )) N
]RN
(k)
解:由题意 X k DFT xn,Y k DFT y n 构造序列 Z k X k jY k 对Z k 作一次N点IFFT可得序列z n z(n) IDFT Z k
Re[w(n)] j Im[w(n)]
Wep (k) Wop (k)
由x1(n) Re[w(n)]得
X1(k) DFT[x1(n)] DFT{Re[w(n)]} Wep (k)
1 2
[W
((k
))
N
W *((N
k ))N
]RN
(k)
由x2 (n) Im[w(n)]得
X 2 (k )
(2) 按频率抽取的基-2FFT流图
同样共有L = 4级蝶形运算,每级N / 2 = 8个蝶形运算
基本蝶形是DIT 蝶形的转置
X m1(k )
X m1( j)
WNr
-1
X m (k ) Xm( j)
每个蝶形的两节点距离为2Lm ,即从第一级到 第四级两节点距离分别为8,4,2,1。
系数WNr的确定:r (k )2 2m1 即k的二进制左移m 1位补零
3. N=16 时,画出基 -2 按时间抽取法及按频率抽取法 的 FFT 流图(时间抽取采用输入倒位序,输出自然数 顺序,频率抽取采用输入自然顺序,输出倒位序)。
解: 自然序
倒位序
0 0000 0000 0 1 0001 1000 8 2 0010 0100 4 3 0011 1100 12 4 0100 0010 2 5 0101 1010 10 6 0110 0110 6 7 0111 1110 14
数字信号处理 答案 第四章

z −1
r sin θ
− r sin θ r cos θ
y ( n)
z −1
网络Ⅱ 解 网络Ⅰ:根据信号流程图写出差分方程
y (n) = 2r cos θ y (n − 1) − r 2 y (n − 2) + x(n)
由差分方程得系统函数
H1 ( z ) =
Y ( z) 1 = X ( z ) 1 − 2r cos θ z −1 + r 2 z −1 1 )(rz −1 − e jθ )
(4)并联型
x ( n)
z −1
1/4 10/3
-7/3
y ( n)
z −1
1/2 将系统函数写成部分分式形式
H ( z) =
−7 / 3 10 / 3 + 1 −1 1 1− z 1 − z −1 4 2
4.4 用直接Ⅰ型和直接Ⅱ型结构实现以下系统函数; (1)
H(z)=
−5 + 2 z −1 − 0.5 z −2 1 + 3z −1 + 3z −2 + z −3
3z 3 + 2 z 2 + 2 z + 5 (2) H(x)=0.8 3 z + 4 z 2 + 3z + 2
解 (1)根据系统函数写出差分方程
y (n) + 3 y (n − 1) + 3 y (n − 2) + y (n − 3) = −5 x(n) + 2 x(n − 1) − 0.5 x(n − 2)
可见网络Ⅰ和网络Ⅱ具有相同极点。 4.3 一个因果线性离散系统由下列差分方程描述:
3 1 1 y(n)- y(n-1)+ y(n-2)=x(n)+ x(n-1) 4 8 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章附加题
1. 由三阶巴特沃思低通滤波器的幅度平方函数推到其系统函数,设
1/c rad s Ω=。
2. 设计一个满足下列指标的模拟Butterworth 低通滤波器,要求通带的截止频率
6,p f kH z =,通带最大衰减3,p A dB =,阻带截止频率12,s f kH z =,阻带的最
小衰减25s A dB =,求出滤波器的系统函数。
3. 设计一个模拟切比雪夫低通滤波器,要求通带的截止频率 f p =3kHz ,通带衰
减要不大于0.2dB ,阻带截止频率 f s = 12kHz ,阻带衰减不小于 50dB 。
4. 数字滤波器经常以下图描述的方式来处理限带模拟信号。
(1)
如果系统()h n 的截止频率是rad s π,110T kHz =,等效模拟滤波器的截止频率是多少?
(2)
设120T kHz =,重复(1)。
(
)
()
()
()
()
()
()
T T a
x t x n y n y t a h n −−−→
−−−→
−−−→
−−−→
模-数变换器
数-模变换器
采样周期采样周期
5. 一个线性时不变因果系统由下列差分方程描述
()()()()10.51y n x n x n y n =----
(1) 系统函数()H Z ,判断系统属于FIR 和IIR 中的哪一类以及它的滤波特性(低通、高通等)。
(2) 若输入()()2cos 0.55x n n π=+ ()0n ≥,求系统输出信号达到稳态后的最大幅度値。
6. 设()a h t 表示一模拟滤波器的单位冲激响应,
()0.9,0
0,0
t a e t h t t -⎧≥=⎨<⎩
用冲激响应不变法,将此模拟滤波器转化成数字滤波器(()h n 表示单位取样响应,即()()a h n Th nT =)。
确定系统函数()H z ,并把T 作为参数,T 为任何值时,数字滤波器是稳定的,并说明数字滤波器近似为低通滤波器还是高通滤波器。
7. 用冲激响应不变法将以下
变换为
,抽样周期为T 。
(1) 。
(2)
,n 为任意正整数。
8. 用冲激响应不变法设计一个离散时间低通滤波器,连续时间巴特沃斯滤波器
的幅度平方函数为
()
()
2
21
1/a
N
c H j j j Ω=
-ΩΩ
滤波器的技术指标为
()
11
0j p p
H e
ω
δωω-≤≤≤≤
()
j s
s H e
ω
δωωπ≤≤≤
假设没有混叠,问冲激响应不变法中所用的采样周期值对设计结果是否有影响,并说明理由。
9. 图示是由R C 组成的模拟滤波器,写出其传输函数()a H s ,并选用一种合适
的转换方法,将()a H s 转化成数字滤波器()H z ,最后画出网络结构图。
10. 试用双线性变换法设计一低通数字滤波器,并满足技术指标如下: (1) 通带和阻带都是频率的单调下降函数,而且没有起伏; (2) 频率在0.5π处的衰减为 3.01dB -;
(3) 频率在0.75π处的衰减至少为15dB 。
11. 设计一个数字滤波器,要求3dB 截止频率为π2.0,频率在π5.0到π之间的
阻带衰减至少为15dB ,系统取样频率为500Hz ,用双线性变换法设计满足指标的最低阶巴特沃思滤波器的传递函数,并用正准型结构实现。
12. 设计一个数字低通滤波器,要求其截止频率 f c = 50Hz ,在 fc 处的衰减为α
c = 3dB 。
系统的取样频率为
500Hz ,要求从二阶 Butterworth 模拟低通滤波
器中用双线性变换法导出数字滤波器的 H(z)。
13. 冲激响应不变法和双线性变换法是两种滤波器设计方法。
这两种方法将s 左
半平面的极点映射到z 平面单位圆内部,从而保持模拟滤波器的稳定性。
如果一个模拟滤波器的所有极点和零点都在s 左半平面内,那么这个滤波器具有最小相位。
(1)确定冲激响应不变法是否可以将最小相位模拟滤波器映射为最小相位
离散时间系统。
(2)对于双线性变换法重复(1)。
14. 阶数2N ≥时,连续时间滤波器()a H s 的系统函数可以用两个低阶系统的级
联来表示
()()()12a a a H s H s H s =
所以,一个数字滤波器可以通过将变换直接应用到()a H s 来设计,也可以通过分别将()1
a H s 、()2
a H s 变换为()1H z 、()2H z 来设计,然后以级联方式实现
()()()12H z H z H z =
(1) 如果()1H z 、()2H z 用冲激响应不变法由()1
a H s 、()2
a H s 设计,与
用冲激响应不变法由()a H s 直接设计的滤波器()H z ,式()()()12H z H z H z =是否成立。
(2) 对双线性变换法重复(1)。
15. 假设某模拟滤波器()a H s 是一个低通滤波器,又知()()
11
a z s z H z H s +=
-=,数字
滤波器()H z 的通带中心位于下面哪种情况?并说明原因。
(1) 0ω=(低通)。
(2) ωπ=(高通)。
(3) 除0或π以外的某一频率(带通)。
16. 设计一个数字巴特沃斯高通滤波器,要求其通带截止频率0.8p ωπ=rad ,通
带衰减不大于3d B ,阻带截止频率0.5s ωπ=rad ,阻带衰减不小于18dB ,采样间隔为2s 。
17. 证明u z =-(旋转变换)是一个低通→高通的稳定变换。
18. 把模拟低通滤波器传递函数中的s 用1/s 代替,就得到模拟高通滤波器。
即
若)(s G a 是低通滤波器的传递函数,)(s H a 是高通滤波器的传递函数,则
)/1()(s G s H a a =。
另外,数字滤波器还可以借助双线性变换1
1+-=
z z s 从模拟
滤波器映射得到(为方便起见,设2=T )。
在这种映射下,虽然频率刻度有了畸变,但保留了幅度特性的特征。
下图的网格表示一
个截止频
率为
2/πω=L 的低通滤波器。
常数A 、B 、C 、D 都是实数。
试问为了得到截止频
率为2/πω=H 的高通滤波器,应如何修改这些系数?
19. 利用双线性变换法设计一个满足下面指标要求的数字带通巴特沃思滤波器:
通带上下边缘频率各为 200Hz 和300Hz ,通带波动3dB ,阻带上下边缘频率分别为 50Hz 和450Hz ,阻带衰减20dB ,取样频率为1kHz 。
请用模拟滤
ω
波器频率变换实现本设计。
20. 设滤波器差分方程为
)2(6
1)1(6
5)1(2
1)()(--
-+
-+
=n y n y n x n x n y
试用正准型及一阶节的级联型、并联型结构实现此差分方程。