基于DSP和AD2S80的绝对式感应同步器测角系统
一种基于AD2S80的测角系统的设计
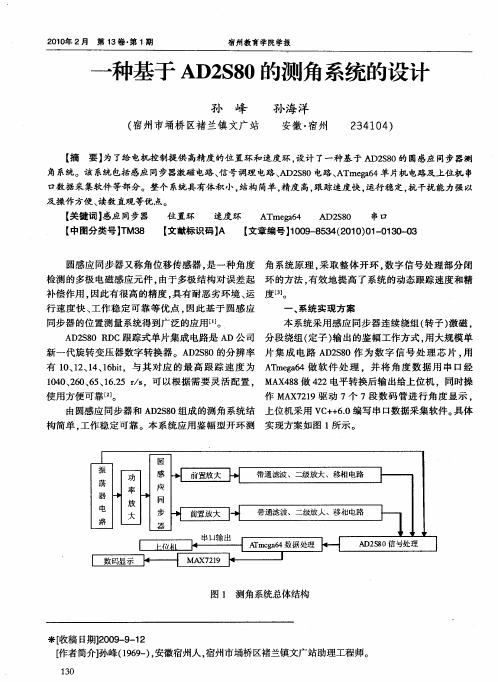
同 时 集 定 时 计 数 器 、外 部 中断 检 测 、P、 S R 、 S IU A T WD T等 多 种 外 设 于一 体 , 在 线 编程 , 可 通 过 片 可 也 本 系统 采 用 70极 的感 应 同步 器 ,将 RP L 2 IP E
感 应 同 步器 的信 号 调 理 电路 共 有 4路 , 由前 置 上 B o odr ot ae 进行在系统编程 , L 便于使用[。 引 放大 、 通 滤波 、 带 二级 放 大 、 相 电路 等组 成 。 移 感 应 同 步器 本 身 是 一 种 低 阻抗 敏 感 元 件 , 热 C K接 到 IT 上作为度进位信号 , B ~ B 2 其 L N0 D 1D 1 作为
角系统。该 系统包括感应 同步器激磁 电路 、 号调理 电路 、 D S0电路 、 T g6 单片机 电路及上位机 串 信 A 28 A mea4
口数 据采 集软 件 等部 分 。整 个 系统具 有体 积 小 , 结构 简单 , 精度 高, 跟踪 速度 快 , 运行 稳 定 , 干扰 能 力强 以 抗 及操作 方便 、 数 直观等优 点 。 读
1. H 方 波 ,经 过 带 通 滤 波 器 选 频 成 同频 率 正 弦 m g6 08 z k ea4有 5 3个 可编 程 的 I 1 O I .工 作 于 5 电压 时 : V
D S0的 I O电平兼 容 ,可扩展外部存储 空间。 信号 , 然后 由 L 85 M17 功率放大后 , 作为圆感应 同步 与 A 2 8 器转子 的激磁信号[。 引
系统 工作时 , 要用 到霍尔 清零 、 按键 清零 和按
检 测 的多 极 电磁 感 应元 件 . 由于 多 极 结 构 对 误 差 起 环的方法 , 有效地提 高了系统 的动态跟踪速度 和精 补偿作用 , 因此 有 很 高 的 精 度 , 有 耐 恶 劣 环 境 、 具 运 度 [。 引 行 速度快 、 作稳定 可靠等优点 。 工 因此 基 于 圆感 应 同步 器 的位 置 测 量 系统 得 到广 泛 的应 用 …。
旋转变压器基础知识
旋转变压器是一种输出电压随转子转角变化的信号元件.当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中.按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正—-余弦旋转变压器(XZ)————其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX)、(XDX )-—-—其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX)实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )—-—-其输出电压与转角成比例关系。
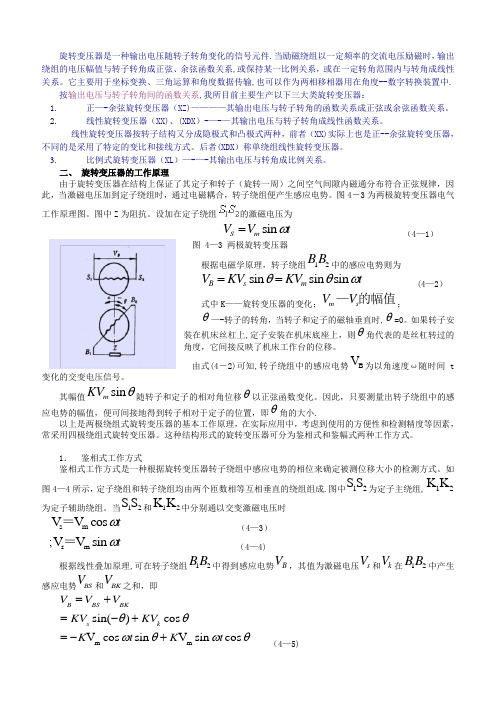
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为 sin ω=- S m V V t (4—1) 图 4—3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2) 式中K ——旋转变压器的变化;—的幅值m s V V ;θ—-转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
AD2S80
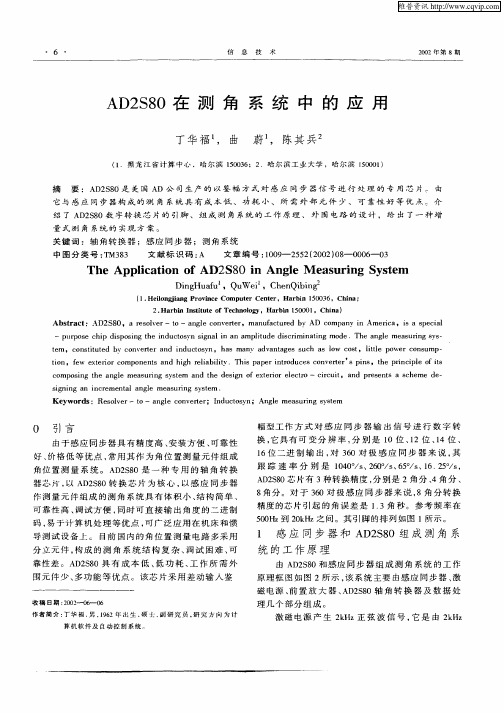
摘 要 :A 2 8 D S 0是 美 国 A D公 司 生产 的 以 鉴 幅 方 式 对 感 应 同 步 器信 号 进 行 处 理 的 专 用 芯 片 。 由 它与 感 应 同 步 器构 成 的测 角 系统 具 有 成 本 低 、功 耗 小 、 所 需 外 部 元 件 少 、 可 靠性 好 等 优 点 。介
.
tm , c n tt t d b o v re n n u t s n, h s ma ) d a tg s s c s l w c s , lt e p we o s mp— e o s i e y c n e r a d i d co y u t a n ,a v n a e u h a o o t i l o rc n u t to in。 f w x e o o p n n s a d h g eibi t e e tr rc m o e t n i h r la l y.Th sp p ri to u e o e e ’ i s t e p ncp e o t i i i a e n r d c s c nv r r S p n , h r i l fi t i s c mp sn h n l e s rn y tm n h e in o x e o lcr — cr ui, a d prs ns a s h me d — o o i g t e a g e m a u g s se a d t e d sg fe tr re e to i i ic t n e e t c e e sg i g a n r me t la g e m e s in y t m . i n n i c e n a n l a ur g s se n Ke ywo d r s:Re o v r— t s le o— a ge c n e tr I u ts n;An l a u n y tm n l o v re ; nd co y ge me s r g s se i
转 AD2S80 系列分解器 数字转换器 的特点及应用

转AD2S80 系列分解器数字转换器的特点及应用(转)AD2S80系列分解器数字转换器的特点及应用2010/07/1516:52摘要:介绍了AD2S80系列分解器数字转换器的主要特点、技术指标及使用方法,并以AD2S80A为例详细说明了外接元件的选择及有关参数的计算方法。
关键词:跟踪速率高频滤波器相敏检波器1概述分解器(Resolver)又叫旋转变压器,它和自整角机(也叫同步器)都是角位移传感器,用来测量旋转物体的转轴角位移和角速度。
分解器数字转换器(缩写为RDC)是一种特殊的模数转换器(ADC),它采用比值跟踪的转换方式,专门用于将分解器的角位移信号转换成相应的二进制数字信号,以便计算机系统能够进行相应的数字运算。
它是计算机系统理想的专用接口器件。
AD2S80系列RDC是美国模拟器件公司(AnalogDevicesInc)生产的RDC产品中的一部分。
AD2S80系列包括AD2S80A,AD2S81A,AD2S82A,AD2S83等产品。
以下介绍它们的主要特点和技术指标及使用方法。
2AD2S80系列RDC的主要特点和技术指标AD2S80系列RDC的共同特点:·单片结构,具有尺寸小、性能稳定等优点。
·线路结构相同,芯片内含有输入缓冲器、分段开关、R2R梯形网络数模转换器、可逆计数器、相敏检波器、积分器、压控振荡器(VCO)、数据转换逻辑电路,输出数据锁存器及输出缓冲器等,原理框图如图1所示。
图1AD2S80系列的原理框图及外围器件基本接线图·与外界的接线方法,外接器件参数计算方法及使用方法都完全相同。
·采用BiMOS工艺,兼有CMOS逻辑电路的优点及采用高精度的线性电路。
因此,AD2S80系列的RDC产品具有精度高、长期稳定性好、可靠性高等优点。
·都具有速度传感的输出电压,它与RDC的输入转角变化速率成正比,其线性度为1%。
·由用户选择动态性能。
基于RDC的感应同步器测角系统设计与实现

基于RDC的感应同步器测角系统设计与实现
刘丽艳;张新磊;寇淑辉;唐声权
【期刊名称】《宇航计测技术》
【年(卷),期】2013(033)004
【摘要】对基于RDC(轴角转换器)的感应同步器测角系统的方案进行了设计与工程实现.利用高度集成的RDC,不仅简化了测角系统的设计结构,而且还提高了测角系统的可靠性,降低了转台的生产成本.
【总页数】3页(P1-3)
【作者】刘丽艳;张新磊;寇淑辉;唐声权
【作者单位】北京航天计量测试技术研究所,北京100076;北京航天计量测试技术研究所,北京100076;北京航天计量测试技术研究所,北京100076;北京航天计量测试技术研究所,北京100076
【正文语种】中文
【中图分类】TM932
【相关文献】
1.基于AD2S80A和AVR的圆感应同步器测角系统 [J], 邱子峰;李文华;许斌鹏
2.基于DSP和AD2S80的绝对式感应同步器测角系统 [J], 邱子峰;李文华;许斌鹏
3.基于瞬时值计算的圆感应同步器测角算法 [J], 马永泉;华建文;代作晓;王战虎
4.基于AD2S80A的双路RDC测角系统及接口设计 [J], 郑力;卢刚;李声晋
5.基于FPGA的绝对式圆感应同步器测角系统的设计与实现 [J], 王飞;付晶;韩昌佩
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AD2S80A的高精度测角测速系统设计
C L sdt i l e toi it f ebte nA 2 8 A adD P S sdt i pe e t geps P D ue e n gc ne a e e D S 0 n S ,D Pue lm n al oi o mp m l r c w om n —
摘
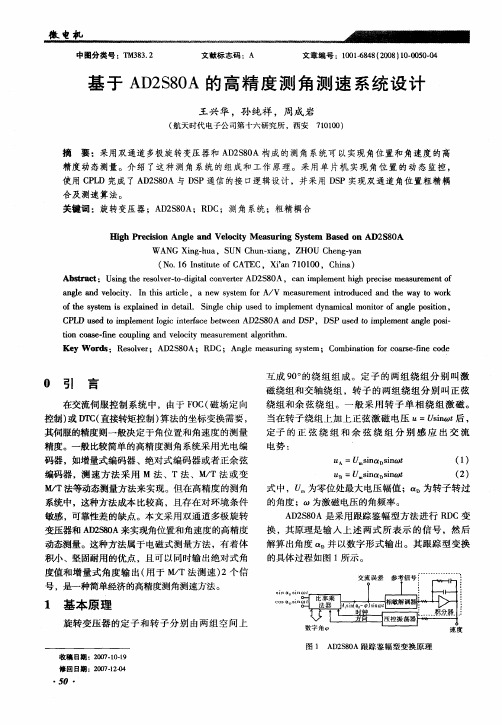
要 :采用双 通道 多极旋 转变压 器和 A 2 8 A构成 的测角 系统 可 以实 现 角位 置和 角速 度 的高 D S0 精度动态测量。介绍 了这 种测角系统的组成和工作原理。采用单片机 实现角位 置的动态监控 , 使用 C L 完成 了 A 28 A 与 D P通信 的接 口逻辑 设计 ,并 采用 D P实现 双 通道 角位 置粗 精 耦 PD D S0 S S
当在转 子 绕 组 上加 上 正弦 激 磁 电 压 u=U iw 后 , s t n
其伺服的精度则一般决定于角位置和角速度的测量
精度 。一 般 比较简 单 的高精 度测 角 系统 采用 光 电编 码器 ,如增 量式 编码 器 、绝 对式 编码 器 或者 正余 弦 编码 器 ,测 速 方 法 采 用 M 法 、T法 、M T法 或 变 / M T法等动态测量 方 法来实 现 。但 在 高精 度 的测 角 /
合及 测速 算法 。
关键词 :旋转 变压器 ;A 28 A;R C;测 角 系统 ;粗精 耦合 D S0 D
m g Pr cso Ange a d lc t e s i y t m s d o AD2S 0A h e ii n l n Veo iy M a urng S s e Ba e n 8
徽 电 机
中图分类号 :T 3 3 2 M 8 . 文献标 志码 :A 文章编号 :10 -8 8 20 )00 5 -4 0 164 (0 8 1.000
基于双通道旋转变压器的高精度测角系统设计
基于双通道旋转变压器的高精度测角系统设计崔建飞;孙凤鸣【摘要】为实现伺服电机驱动回旋机构应用中的角秒级的角度测量精度.选用电气误差小于±10″的无刷双通道旋转变压器作为角度位置传感器,设计了双通道旋转变压器的激励及解算电路,通过数字信号处理器(Digital SignalProcessor,DSP)TMS320F28335读取解算电路输出的角度位置.与传统的无刷双通道旋转变压器角度解算电路相比较,可以有效减少软件算法中数据整合和纠错部分的工作量.实验结果表明该系统能稳定输出高质量的角度位置指示信号.适用于伺服电机定位控制等需要高精度角度位置反馈的场合,具有可靠性高、精度高、软件开销少的优点.%The aim of this study was to implement high precision angel measurement of rotary device. Two speed resolver which electrical error is less than ± 10″ was utilized to as angle position angle. Powering and decoding circuits were designed for the two speed resolver. The angle information was then read by Digital Signal Processor (DSP)TMS320F28335. Compared with other decoding methods of two speed resolver,this study can reduce software consumption on data integration and error correction. The results we obtained demonstrate this system could output high quality angle position indication signal with features of high precision,high reliability and simply coding.【期刊名称】《电子设计工程》【年(卷),期】2018(026)011【总页数】5页(P136-139,144)【关键词】角度测量;双通道旋转变压器;双通道轴角数字转换模块;TMS320F28335【作者】崔建飞;孙凤鸣【作者单位】天津津航计算技术研究所天津300300;天津市航空电子综合显示控制重点实验室天津300300;天津津航计算技术研究所天津300300;中国民航大学中欧航空工程师学院,天津300300【正文语种】中文【中图分类】TN79+2在运动系统的精密控制领域,角度位置的测量至关重要,常用的角度位置传感器包括光电编码器[1]、霍尔传感器[2]、旋转变压器[3](以下简称旋变)等种类。
旋转变压器基础知识

旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值ms V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言
1 测 角 系统 工作 原 理 及 实现 方 案
测角系统是转 台系统 中最重要 的组成部分之 一 , 航天地 是 面测试系统 、 工业精 密控制 系统 等不可 缺少 的要组 成部 分。 圆感应 同步器是一种 角度检测 的多极电磁感应 器件 , 有精度 具
该系统粗精双通道感应同步器均采用单 相转子激 励 , 两相
定子绕组输 出的鉴幅工作方式 。工作原理 如下 : 圆感应 同步 设
器转子激励信号为
适 合在 恶 劣 环境 工作 , 有很 高的 实用 价值 。 具
关键词 : 绝对式感应 同步 器; 角; D S0 D P 动 态误差 测 A 28 ;S ;
中 图 分 类号 :H 2 T 82 文 献 标 识 码 : A 文 章 编 号 :0 2一】4 (0 0 0 0 6 10 8 1 2 1 )8— 00—0 3
仪 表 呲
技
e
Ab o u e I d c o y g e M e s r me tS se Ba e n DS n s l t n u t s n An l a u e n y tm s d o P a d AD2 8 0 S
Q uz— n 。 .IWe—u 。X i—e g I ieg一 L nha . U Bnpn f
术 _ 5
与
2 Grd aeU ies y C ieeA a e f c n e, e ig1 03 C ia . a u t nv ri , hns cd myo i csB in 0 09, hn ) t Se j
Ab t a t Ba e n a s l t d c o y sa g e s n o , sn 2 8 n P t r c s h in l u i gt e w y o oe s r c : s d o b ou e i u t s n a n l e s r u ig AD S 0 a d DS p o e s t esg a , s h a f n o n wh l o e o p a d s n lp o e s p r c o e o t e a s l t n u a mp i d — ee t a u e n y tm sd sg e . h sp p r p n lo n i a r c s at ls d l p, b o ue a g lra l u e d t c g o h t me s r me t s s e wa e in d T i a e d ti dy d s u s d t e h r w r fte s s m ,h i u t n l ssa d t e s p t a w s u e o h ih e h u n n p e n ea l l ic s e h a d a e o y t e h e t e cr i a ay i n h t h t a s d t eg tn te r n ig s e d a d c e mi i h y a ce r r T e s s m a h i u so i l tu t r , o k n t bl y h g r cso a d b t rn ie i n s t e d n mi ro . h y t h ste vr e f mp e sr cu e w r ig sa i t , ih p e iin, n et o s h e t s i e mmu i n—
( . i n I si t o t s n r c in M e a is C i eeA a e fS i c s X ’n7 0 1 , hn ; 1 X ’ n t u e f a t Opi d P ei o h n c , hn s c d my o ce e , i 1 1 9 C i a ca s n a
21 00年
传 感 器
a S ns r nd e o
2 0 0l No .8
第 8期
基 于 DS P和 A S 0的绝对 式 感应 同步器 测 角 系统 D2 8
邱 子峰 。 , 。 李文 华 许斌 鹏 ,
( . 国科 学 院西 安 光 学 精 密 机 械 研 究 所 , 西西 安 1中 陕 70 1 ;. 国 科 学 院研 究 生 院 , 京 1 19 2 中 北 10 3 ) 0 0 9
t . e s se wa s e ily a pl d t e n te had cr u sa e n a e y hih ut ia e v l s y Th y tm se p cal p i o beus d i h r ic m tnc s a d h d v r g i z bl aue . e l Ke r y wo ds: b ou e idu ts n;a l a urm e t a s l t n co y nge me s e n ;AD2S 0 ;DS 8 P;dy mi ro na c e r r
摘 要: 以绝对式 圆感应 同步器作为角度 传感器, 应用 A 2 8 D S0和 D P对其输 出信号进行处理 , 用总体开环和数 字信 S 采 号处理部分闭环的方案, 设计 了一套鉴幅型绝对角度 测量 系统。具体论述 了该 系统 的硬件 结构 、 电路 分析 以及 系统在提 高运行 速度 和动 态误 差补偿 方面所采取 的措施。整个 系统具有 结构 简单 , 定性好 , 度 高, 干扰 能力强 的优 点 , 别 稳 精 抗 特