飞剪机构设计说明书
机构原理课程设计飞剪
机构原理课程设计飞剪一、教学目标本课程的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握飞剪的机构原理、工作原理和应用领域;技能目标要求学生能够运用所学知识分析飞剪的结构和性能,并具备一定的创新设计能力;情感态度价值观目标要求学生培养对机械工程的兴趣,提高工程实践能力,树立正确的工程伦理观。
通过分析课程性质、学生特点和教学要求,明确课程目标,将目标分解为具体的学习成果,以便后续的教学设计和评估。
二、教学内容根据课程目标,选择和教学内容,确保内容的科学性和系统性。
本课程的教学大纲如下:1.飞剪的机构原理:介绍飞剪的机构组成、工作原理和性能指标。
2.飞剪的工作原理:讲解飞剪的运动学、动力学和控制原理。
3.飞剪的应用领域:介绍飞剪在工程实际中的应用,如钢铁、矿山、造纸等行业。
4.飞剪的创新设计:学习飞剪的设计方法,培养学生的创新设计能力。
教学内容以教材为主,结合实际情况,适当拓展相关参考书籍和多媒体资料。
三、教学方法选择合适的教学方法,如讲授法、讨论法、案例分析法、实验法等,以激发学生的学习兴趣和主动性。
1.讲授法:用于讲解飞剪的机构原理、工作原理和应用领域。
2.讨论法:学生针对飞剪的设计和应用展开讨论,促进学生思考。
3.案例分析法:分析实际案例,让学生了解飞剪在工程中的应用和优势。
4.实验法:安排实验课程,让学生亲身体验飞剪的工作原理和性能。
通过多样化的教学方法,提高学生的学习兴趣和主动性。
四、教学资源选择和准备适当的教学资源,包括教材、参考书、多媒体资料、实验设备等。
1.教材:选用权威、实用的教材,如《机械工程导论》、《飞剪设计与应用》等。
2.参考书:推荐学生阅读相关领域的经典著作和最新研究成果。
3.多媒体资料:制作课件、视频等多媒体资料,丰富教学手段。
4.实验设备:配置合适的实验设备,为学生提供实践操作的机会。
教学资源应能够支持教学内容和教学方法的实施,丰富学生的学习体验。
飞剪的机构分析与设计
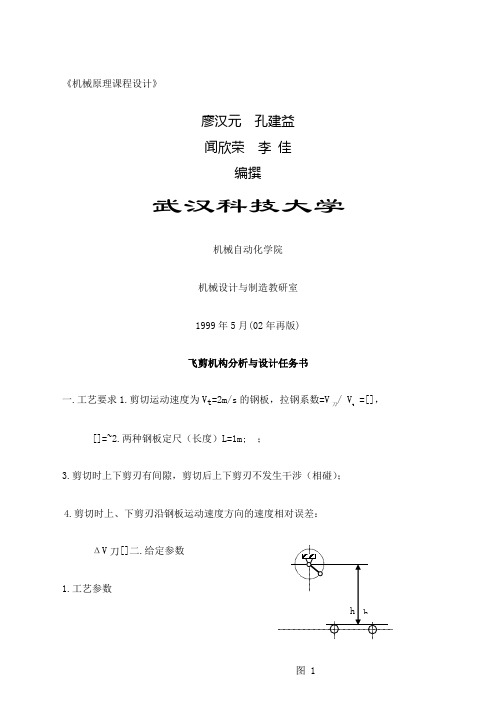
《机械原理课程设计》廖汉元孔建益闻欣荣李佳编撰武汉科技大学机械自动化学院机械设计与制造教研室1999年5月(02年再版)飞剪机构分析与设计任务书一.工艺要求1.剪切运动速度为V t=2m/s的钢板,拉钢系数=V刀/ Vt=[],[]=~2.两种钢板定尺(长度)L=1m; ;3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰);4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差:ΔV刀[]二.给定参数1.工艺参数图 1剪切力F=10T=98kN;支座A距辊道面高约为 h250mm(如图1);刀刃重合量Δh5mm;钢板厚度Δb=1mm;2.机构设计参数按定尺L=1m给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:V 刀=2|V Et -V Ft |/(V Et +V Ft ) = .3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数>1:V 刀= (V Et +V Ft )/2;= V 刀/ V t = =~. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h 250mm刀刃重合量Δh5mm 钢板厚度Δb=1mm 2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
《飞剪机构分析与设计》补充资料(doc 8页)

《飞剪机构分析与设计》补充资料(doc 8页)<<飞剪机构分析与设计>>补充资料一、 正弦飞剪机构的设计1、 建立机构设计的计算模型e 、f 为由刀刃安装确定的结构尺寸,Δh 为刀刃重合量。
刀刃E 的位置方程: x E =acos ϕ1+e y E =asin ϕ1.刀刃E 的速度方程: x 'E = -a ω1sin ϕ1 y 'E =a ω1cos ϕ1. 剪切角ϕ01: cos ϕ01=(a-Δh )/a曲柄半径a :要求开始剪切的刀刃速度y 'E 为[δ]v t ,由此得到: [δ]v t = a ω1(a-Δh )/a a= [δ]v t /ω1+Δh 。
轭架结构尺寸d : d=a+e+Δh+f 。
2、 计算实例:已知:vt=2m/s,L=1m, Δh=5mm, [δ]=1.025,Δv 刀<0.05。
曲柄角速度:ω1=2πv t /L=2π×2/1=4π/ s 曲柄半径:a= [δ]v t /ω1+Δh=1.025×2000/(4π)+5=168.1338mm 。
剪切角ϕ01:cos ϕ01=(a-Δh )/a=(168.1338-5)/168.1338=0.97026188 ϕ01=-14.0080140°轭架结构尺寸d :若取e=f=250md=a+e+Δh+f=168+250+5+250=673mm 。
校验机器性能 刀刃剪钢速度:AB n1E FΔe f d ϕϕ10xy ax EEy Ex'E= -aω1sinϕ1=-168×4π⨯sin(-14.0080140)=511.02mm/s.y'E=v Et=aω1cosϕ1.=168×4π⨯cos(-14.0080140)=2047.7248mm/s=V Ft δ=2047.7248/2000=1.0239。
飞剪的机构分析与设计飞剪的机构分析与设计飞剪飞剪的机构分析与设计的机构分析与设计飞剪的机构分析与设计

图 1一.工艺要求1.剪切运动速度为V t =2m/s 的钢板,拉钢系数δ=V 刀/ V t =[δ], [δ]=1.01~1.052.两种钢板定尺(长度)L=1m; 0.65m ;3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰);4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV 刀≤0.05=[ε]二.给定参数1.工艺参数剪切力F=10T=98kN;支座A 距辊道面高约为 h ≈250mm(如图1);钢板厚度Δb=1mm;2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:△V 刀=2|V Et -V Ft |/(V Et +V Ft )≤ [ε] = 0.05.3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V 刀= (V Et +V Ft )/2;δ= V 刀/ V t =[δ] =1.01~1.05. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h ≈250mm 刀刃重合量Δh ≈5mm 钢板厚度Δb=1mm 2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角γ2、摇杆摆角ψ如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
飞剪机减速器及四连杆执行机构设计说明书
机械设计课程设计计算说明书设计题目飞剪机传动装置设计能源与动力工程学院(系) 390414 班设计者 39041423 张龙指导教师杨洋2012 年 5 月 9 日北京航空航天大学设计任务书1.设计题目:飞剪机传动装置设计2.设计要求1).飞剪机用于轧件的剪切,在轧件运动方向上剪刃的速度应等于或略大于轧件运动速度。
2).为保证轧件剪切断面质量,要求飞剪机的一对剪切刀片在剪切过程中做平移运动。
3).剪刃的运动轨迹应是一条封闭曲线,且在剪切段应尽量平直,剪切过程中要求剪切速度均匀。
4)单向运动,频繁起动,使用期限为十年,专业机械厂制造,小批量生产,两班制工作。
3.原始技术数据4.设计任务(1)选择电动机。
(2)设计工作机构和减速器。
(3)选择联轴器。
(4)绘制减速器转配图1张,零件工作图2张。
(5)编写设计说明书1分。
目录一、飞剪机总体方案设计 (3)1.飞剪机总体布局 (3)2.执行机构设计 (3)3.电机的选择 (4)4.传动比的分配 (4)5.运动和动力参数计算 (5)二、传动零件设计 (6)1.高速级齿轮传动设计 (6)2.低速级齿轮传动设计 (9)3.四连杆机构设计 (12)三、轴的设计 (13)1.高速轴的设计与校核 (13)2.中间轴的设计与校核 (15)3.低速轴的设计与校核 (17)四、轴承的选择与校核 (21)1.高速轴轴承的选择与校核 (21)2.中间轴轴承的选择与校核 (22)3.低速轴轴承的选择与校核 (23)五、键的选择与校核 (25)六、减速器箱体及附件的设计 (27)1.减速器机体各部分结构尺寸 (27)2.润滑和密封形式的选择 (29)七、其他设计说明 (30)八、参考文献 (31)九、附录 (32)1)四连杆执行机构尺寸示意图 (32)2)四连杆运动特性参数表格 (33)3)刀刃轨迹 (34)4)刀刃速度 (35)5)刀刃角度 (36)一、飞剪机总体方案设计1.飞剪机总体布局如图,由电动机输出扭矩,用弹性联轴器连接电动机输出轴与三级减速器的输入端。
飞剪设备说明书
3#飞剪设备说明书一、设备用途3#飞剪机位于精轧机组前,用于轧机正常轧制时的切头和切尾和事故碎断。
二、主要技术性能a、剪机型式:回转式b、工作制度:启停制c、轧件速度:5.13-14.91m/s(预留18.6m/s)d、剪切最大断面:470mm2e、剪切温度:>850℃f、切头尾长度:100-740 mmg、剪刃回转半径:540 mmh、剪切力:最大84KNi、电动机型号:ZTFS-355-22功率N=225KW转速:450r/minj、速比:i=1三、设备组成和结构特点1、设备组成本设备由入口押运导槽、3#飞剪机、转辙器、碎断剪和收集装置五部分组成。
2、结构特点(1)入口摆动导槽入口摆动导槽由二个气缸驱动,分别为提升缸和横移缸,工作时两个缸同时动作,提升缸缸径为Φ100 mm,杆径Φ40,行程为40 mm,横移缸为齿轮齿条摆动气缸,缸径为Φ100 mm,摆动角度为180度。
a、当正常轧制碎断剪切时,剪前摆动导槽上位并向传动侧刀片的位置方向。
b、当切头时,热金属检测器测得轧件头部信号后,剪前摆动导槽牌下位,并靠传动侧刀片的位置方向。
切头后,摆动导管运动至正常过钢位。
c、当切尾时,热金属检测器测得轧件尾部信号后,延时一定时间,剪前摆动导槽处于下位,并靠工作侧刀片的位置方向,切尾后摆动导槽运动至正常过钢位。
(2)3#飞剪机飞剪采用回转式结构,一台225KW的电动机通过鼓型齿联轴器带动剪机高速轴转动,通过剪机内两对i=1的齿轮带动两剪轴及剪刀转动,上下剪刀体均为两把刀片,分别为一对工作侧上下剪刃,一对为传动侧上下剪刃。
a、当正常轧制,碎断剪切、切头时,轧件通过传动侧刀片方向运行。
b、当切尾时,轧件通过工作侧刀片方向运行。
(3)3#飞剪后转辙器3#飞剪后转辙器其功能如下:a、将切头后的轧件导入精轧机;b、事故时将轧件导入碎断剪。
c、将切下的轧件头、尾导入收集装置。
控制方式:气动控制气缸活塞直径:Φ100 mm活塞杆直径:Φ32 mm行程:180 mm(4)碎断剪碎断剪的功能:事故时碎断主要技术性能a、剪机型式:回转式(3刃)b、工作制度:连续工作制c、剪切轧件运行速度:5.13-14.91m/s(预留18.6m/s)d、剪刃回转半径:190mme、剪切温度:>800℃f、碎断长度: ̄260mmg、最大剪切力:85KNh、总传动比:I=1i、电动机型号:Z4-250-31功率N=132KW转速:1000r/min碎断后的轧件通过3#飞剪后的转辙器导入收集装置。
飞剪机构设计说明书

=飞剪机构设计说明书一设计内容1.根据工艺要求制定机构方案,定性比较各方案的优劣;2.设计出满足工艺要求的机构尺寸及上、下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上、下剪刃的轨迹;4.进行机构的运动及力分析,检验上、下剪刃的速度相对误差、拉钢系数是否满足要求,并求出曲柄上的平衡力矩Mb。
二工作原理及要求如上图所示,摆式飞剪由四杆机构ABCD构成。
上剪刃E装在连杆BC上,下剪刃F装在摇杆CD上。
当曲柄AB等速转动时,将厚度为Db速度为Vt的运动中的钢材剪成定尺(长度)为L的成品。
飞剪机运动要求:1 曲柄转一圈对钢材剪切一次;2 剪切时,上、下剪刃速度相对误差小于其许用值:ΔV刀=|VEt-VFt|/(VEt+VFt)<=[ ε]=0.053 剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1:V刀=(VEt+VFt)/2;δ= V刀/Vt=[ δ]=1.01~1.054 能调节钢材的剪切长度L三原始数据工艺参数剪切力F=10T=98kN;支座A距辊道面高约为h=250mm刀刃生命量Δh=5mm钢板厚度Δb=1mm机构设计参数按定尺L=1m给出机构的行程速比系数k、远极位传动角γ2、摇杆摆角ψ如下表所示。
四机构型综合机构型综合的方法及一般原则(1)固定一个构件为机架,可得到一个全铰链机构。
(2)可用移动副直接代替转动副而得到带有移动副的机构。
(3)具有两个转动副的一个构件可变换成一个高副。
(4)最简单机构原则。
首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。
(5)最低级别机构原则。
采用多元连杆为机架一般不容易得到高级别机构。
(6)不出现无功能结构原则。
(7)最低成本原则。
加式易难及加工成本按如下顺序递增:转动副:移动副:高副。
(8)最符合工艺要求原则。
工艺对机构的动作要求:(1)为完成剪切,上下剪刃应完成相对分合运动;(2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动;(3)根据以上要求可知,上、下剪刃运动轨迹之一应为封闭曲线(如图a、b、c、d 所示)。
飞剪机构设计讲稿(new)(11年2)共46页

3.刀刃刀刃位位予置置选应确同机定时架考倾虑刀角刃重4合(量=1h 0, 及上下刀刃水平使速曲度基柄本与相等机的架要求共。线
1
2
A
b 2
C
3
a B
4
c
eF
E
3
f
y h
h
D
P P34 24
x
4
图7
11
fdc o4 sh
e(f h)2(da)22(f h)d (a)c o41/s2
E
a LCE e
2
2
3
L 4
E F h
1 3 f
h
c
分别由BEC和
1
D P34(P24)
DFC求出1和2 x
图8
12
5.调整上下刀刃水平速度误差
(调整机架倾角4)
12
1
y
V E=V C+V EC V F=V C+V FC
若E=90,
2 C
Aa
B
b
13
1
y
E = E -90
Aa
LCE
4 = 4 - E
B
2 b C
2
e 2
h E F h
3
L 4
E
1
f
3
c
1 = 1 - E
D P34(P24)
2 = 2 - E x
图8
3 = 3 - E
13
6,曲柄半径的调整
由于VB未知,故作如下假设:
k1=vB/v刀---------曲柄销的速度与上下刀刃平均水
平速度之比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞剪机构设计说明书一设计内容1.根据工艺要求制定机构方案,定性比较各方案的优劣;2.设计出满足工艺要求的机构尺寸及上、下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上、下剪刃的轨迹;4.进行机构的运动及力分析,检验上、下剪刃的速度相对误差、拉钢系数是否满足要求,并求出曲柄上的平衡力矩Mb。
二工作原理及要求如上图所示,摆式飞剪由四杆机构ABCD构成。
上剪刃E装在连杆BC上,下剪刃F装在摇杆CD上。
当曲柄AB等速转动时,将厚度为Db速度为Vt的运动中的钢材剪成定尺(长度)为L的成品。
飞剪机运动要求:1 曲柄转一圈对钢材剪切一次;2 剪切时,上、下剪刃速度相对误差小于其许用值:ΔV刀=|VEt-VFt|/(VEt+VFt)<=[ ε]=0.053 剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1:V刀=(VEt+VFt)/2;δ= V刀/Vt=[ δ]=1.01~1.054 能调节钢材的剪切长度L三原始数据工艺参数剪切力F=10T=98kN;支座A距辊道面高约为h=250mm刀刃生命量Δh=5mm钢板厚度Δb=1mm机构设计参数按定尺L=1m给出机构的行程速比系数k、远极位传动角γ2、摇杆摆角ψ如下表所示。
四机构型综合机构型综合的方法及一般原则(1)固定一个构件为机架,可得到一个全铰链机构。
(2)可用移动副直接代替转动副而得到带有移动副的机构。
(3)具有两个转动副的一个构件可变换成一个高副。
(4)最简单机构原则。
首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。
(5)最低级别机构原则。
采用多元连杆为机架一般不容易得到高级别机构。
(6)不出现无功能结构原则。
(7)最低成本原则。
加式易难及加工成本按如下顺序递增:转动副:移动副:高副。
(8)最符合工艺要求原则。
工艺对机构的动作要求:(1)为完成剪切,上下剪刃应完成相对分合运动;(2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动;(3)根据以上要求可知,上、下剪刃运动轨迹之一应为封闭曲线(如图a、b、c、d 所示)。
图d上、下刀刃的运动轨迹均为非封闭曲线,使得飞剪在空行程中沿钢材的逆运动方向剪切,这是不允许的。
三种方案的比较本计算方案我的方案小组内其它方案运动链图机构简图刀刃轨迹优点1.采用四杆机构,结构紧凑,运动形式较简单.2.全部采用转动副,加工容易,成本也比较低。
3.通过机构尺寸,容易实现不同定尺的加工任务。
1.因为下刀刃运动形式简单,容易调整上下刀刃的水平速度误差。
2.机构可变尺寸多,可以调节多种定尺加式方式。
1.采用四杆机构,结构和运动形式比较简单。
2.上下刀刃配合较好,适合加工固定尺寸钢板。
缺点1.采用六杆机构,结构比较复杂。
2.采用了较多的移动副,增加了加工难度和制造成本。
而且本机构占用空间比较大。
1.不方便改变定尺长度。
2.移动副的构件较大,克服摩擦力的能量损失大,效率不高注意:机构简图尺寸可能不符合实际情况。
五机构的尺寸设计下面列出参照《机械原理》和设计指导书的方法,用Matlab计算尺寸的过程。
(“%”之中的为注释)%%%%%%%%%设计参数初始赋值%%%%%%%%k=1.2 %%%k表示行程数比系数%%%%%gama2=68*pi/180 %%%gama2表示γ2%%%%fai=22*pi/180 %%%%fai表示Ψ%%%%%%%%aerf4=15*pi/180 %%%%aerf4表示α4,以后aerf均表示α%%%%k1=1.2 %%%k1为曲柄销B点的速度与刀刃平均速度之比,此处初值任取1左右%%%%vt=2segema=1.04 %%%segema表示拉钢系数%%%%%L=1h=0.25detah=0.005 %%%detah表示刀刃重合量%%%%%%detab=0.001 %%%detab表示钢板厚度%%%%%%%fc=98000 %%%表示剪切力%%%%%%%%%%% %%%%%%%%%%计算相对尺寸%%%%%%%%%%%%%%%seta=pi*(k-1)/(k+1)gama1=fai+gama2-setaseta0=atan((sin(gama2)*sin(seta))/(sin(gama1)-sin(gama2)*cos(seta)))A=cos(seta+seta0)*sin(gama2+seta0)B=sin(gama2)+sin(seta0)*cos(gama1+seta+seta0)N=2*sin(gama2)*cos(seta+seta0)a0=(A-B)/Nb0=(A+B)/Nc0=sin(seta0)/sin(gama2)d0=1//////////////////////////////计算结果////////////////////////////////seta =0.2856gama1 =1.2852seta0 =1.3094A =-0.0146B =-0.0061N =-0.0450a0 =0.1897b0 =0.4590c0 =1.0419d0 =1%%%%%%%%%%计算绝对尺寸%%%%%%%%%%%%%%t=L/vtw1=2*pi/t%%%计算曲柄转速%%%a=k1*segema*L/(2*pi)%%%其中k1=Vb-V刀,利用B点的速度与k1,V刀的关系计算a%%% ul=a/a0b=ul*b0c=ul*c0d=ul/////////////////////////////////计算结果//////////////////////////// t =0.5000T =0.5000w1 =12.5664a =0.1986ul =1.0471b =0.4806c =1.0909d =1.0471%%%%%%%%刀刃位置确定%%%%%%%%%%%%%%%%f=d*cos(aerf4)-he=((f-detah)^2+(d-a)^2-2*(f-detah)*(d-a)*cos(aerf4))^0.5detaaerf=acos((c^2+(d-a)^2-b^2)/(2*c*(d-a)))aerf3=aerf4+detaaerfLce=(c^2+(f-detah)^2-2*c*(f-detah)*cos(aerf3))^0.5Lcf=(c^2+f^2-2*c*f*cos(aerf3))^0.5aerf2=acos((b^2+e^2-Lce^2)/(2*b*e))Lcef=(Lce+Lcf)/2aerf2x=acos((b^2+e^2-Lcef^2)/(2*b*e))%%%aerf2x即表示计算重新得到的α2%%% aerf3x=acos((c^2+f^2-Lcef^2)/(2*c*f))%%%aerf3x即表示计算重新得到的α3%%% //////////////////////////////计算结果//////////////////////////////f =0.7614e =0.2285detaaerf =0.4347aerf3 =0.6965Lce =0.7045Lcf =0.7039aerf2 =2.8977Lcef =0.7042aerf2x =2.8904aerf3x =0.6969%%%%%%%%%%剪切角fai01的确定%%%%%%%%%Jbec=acos((e^2+Lcef^2-b^2)/(2*e*Lcef))%%%Jbec表示角BEC%%% Jdec=acos((f^2+Lcef^2-c^2)/(2*f*Lcef))%%%Jdec表示角DEC%%%cegama=Jbec+JdecLbd=(e^2+f^2-2*e*f*cos(cegama))^0.5Jdab=acos((a^2+d^2-Lbd^2)/(2*a*d))fai01=aerf4-Jdab%%%Jdad表示角DAD%%%//////////////////////////////计算结果/////////////////////////////Jbec =0.1704Jdec =1.6778cegama =1.8483Lbd =0.8528Jdab =0.1886fai01 =0.0732%%%%%%%调整上下刀刃水平速度误差%%%%%%%%%%%%%%%计算九个理论点的程序也是如下代码改编过来的%%%l=(a^2+d^2-2*a*d*cos(fai01-aerf4))^0.5fai00=atan((d*sin(aerf4)-a*sin(fai01))/(d*cos(aerf4)-a*cos(fai01)))fai3=fai00-acos((b^2-l^2-c^2)/(2*l*c))%%%按正切函数求角度时,应根据函数中分子分母的正负号判断所在象限后决定%%%fai2=atan((l*sin(fai00)+c*sin(fai3))/(l*cos(fai00)+c*cos(fai3)))faie=atan((e*sin(fai2+aerf2x)-b*sin(fai2))/(e*cos(fai2+aerf2x)-b*cos(fai2)))if(faie<0) %%%对faie取值的选取%%%faie=pi+faieenddetafaie=faie-pi/2aerf4x=aerf4-detafaie%%%aerf4x,aerf01x,fai2x,fai3x均为调整后的值%%%fai01x=fai01-detafaiefai2x=fai2-detafaiefai3x=fai3-detafaie////////////////////////////////计算结果//////////////////////////////////l =0.8528fai00 =0.3055fai3 =-2.3999fai2 =-1.5523faie =1.5086detafaie =-0.0622aerf4x =0.3240fai01x =0.1354fai2x =-1.4901-2.3377%%%%%%%%调整刀刃与钢材运动速度同步%%%%%%%%%w2=(-a*w1*sin(fai01x-fai3x))/(b*sin(fai2x-fai3x))w3=(a*w1*sin(fai01x-fai2x))/(c*sin(fai3x-fai2x))vet=a*w1*cos(fai01x)+e*w2*cos(fai2x+aerf2x)vft=f*w3*cos(fai3x-aerf3x)vd=(vet+vft)/2k1x=a*w1/vd%%%k1x为同步后的值%%%ax=k1x*segema*L/(2*pi)%%%ax和下面的bx,cx,dx,ex,fx均为满足给定设计要求的机构尺寸%%% ux=ax/abx=b*uxcx=c*uxdx=d*uxex=e*uxfx=f*ux%%%%%%%%%%剪切角为fai01x%%%%%%%%%%///////////////////////////////结果/////////////////////////////w2 =-4.2934w3 =-3.0472vet =2.3068vft =2.3068vd =2.3068k1x =1.0820ax =0.1791ux =0.9017bx =0.43330.9837dx =0.9441ex =0.2060fx =0.686六机构平衡力矩的计算(仍然接上面程序)%%%%%%%%%计算平衡力矩%%%%%fai1x=fai01xvex=-ax*w1*sin(fai1x)-ex*w2*sin(fai2x+aerf2x) vfx=-fx*w3*sin(fai3x-aerf3x)Mb=fc*(vex-vfx)/w1/////////////////////////////////////计算结果///////////////////////////// fai1x =0.1354vex =0.5679vfx =-0.2235Mb =6.1714e+003%%%%机械校验%%%%xe=ax*cos(fai1x)+ex*cos(fai2x+aerf2x)xf=dx*cos(aerf4x)+fx*cos(fai3x-aerf3x)ye=ax*sin(fai1x)+ex*sin(fai2x+aerf2x)yf=dx*sin(aerf4x)+fx*sin(fai3x-aerf3x)detax=abs(xe-xf)/(xe+xf)detay=abs(ye-yf)/(ye+yf)vet1=ax*w1*cos(fai1x)+ex*w2*cos(fai2x+aerf2x)vft1=fx*w3*cos(fai3x-aerf3x)vd1=(vet1+vft1)/2segema1=vd1/vtsegemadetavd=abs(vet1-vft1)/(vet1+vft1)/////////////////////////////////计算结果///////////////////////////xe =0.2124xf =0.2124ye =0.2272yf =0.2272detax =5.2270e-016detay =8.5506e-016vet1 =2.0800vft1 =2.0800vd1 =2.0800segema1 =1.0400segema =1.0400detavd =根据计算结果,利用PRO/E建模,进行仿真后得到的图像:E点与F点的运动学仿真.由上图可以看出,上下刀刃共速时,即是飞剪工作位置点。