飞剪的机构分析与设计
飞剪的机构分析与设计飞剪的机构分析与设计飞剪飞剪的机构分析与设计的机构分析与设计飞剪的机构分析与设计

图 1一.工艺要求1.剪切运动速度为V t =2m/s 的钢板,拉钢系数δ=V 刀/ V t =[δ], [δ]=1.01~1.052.两种钢板定尺(长度)L=1m; 0.65m ;3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰);4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV 刀≤0.05=[ε]二.给定参数1.工艺参数剪切力F=10T=98kN;支座A 距辊道面高约为 h ≈250mm(如图1);钢板厚度Δb=1mm;2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:△V 刀=2|V Et -V Ft |/(V Et +V Ft )≤ [ε] = 0.05.3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V 刀= (V Et +V Ft )/2;δ= V 刀/ V t =[δ] =1.01~1.05. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h ≈250mm 刀刃重合量Δh ≈5mm 钢板厚度Δb=1mm 2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角γ2、摇杆摆角ψ如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
《飞剪机构分析与设计》补充资料(doc 8页)
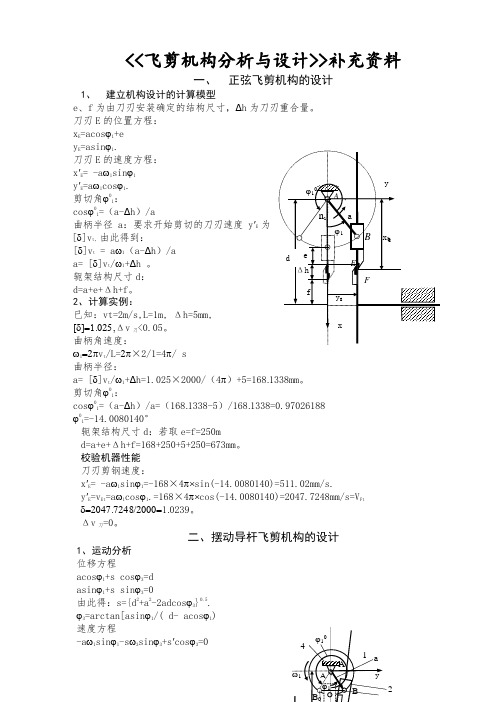
<<飞剪机构分析与设计>>补充资料一、正弦飞剪机构的设计1、建立机构设计的计算模型e、f为由刀刃安装确定的结构尺寸,Δh为刀刃重合量。
刀刃E的位置方程:x E =acosϕ1+ey E =asinϕ1.刀刃E的速度方程:x'E = -aω1sinϕ1y'E =aω1cosϕ1.剪切角ϕ01:cosϕ01=(a-Δh)/a曲柄半径a:要求开始剪切的刀刃速度y'E为[δ]vt,由此得到:[δ]vt = aω1(a-Δh)/aa= [δ]vt /ω1+Δh 。
轭架结构尺寸d:d=a+e+Δh+f。
2、计算实例:已知:vt=2m/s,L=1m, Δh=5mm, [δ]=1.025,Δv刀<0.05。
曲柄角速度:ω1=2πv t/L=2π×2/1=4π/ s曲柄半径:a= [δ]vt /ω1+Δh=1.025×2000/(4π)+5=168.1338mm。
剪切角ϕ01:cosϕ01=(a-Δh)/a=(168.1338-5)/168.1338=0.97026188 ϕ01=-14.0080140°轭架结构尺寸d:若取e=f=250md=a+e+Δh+f=168+250+5+250=673mm。
校验机器性能刀刃剪钢速度:x'E = -aω1sinϕ1=-168×4π⨯sin(-14.0080140)=511.02mm/s.y'E =vEt=aω1cosϕ1.=168×4π⨯cos(-14.0080140)=2047.7248mm/s=VFtδ=2047.7248/2000=1.0239。
Δv刀=0。
二、摆动导杆飞剪机构的设计1、运动分析位移方程acosϕ1+s cosϕ3=dasinϕ1+s sinϕ3=0由此得:s={d2+a2-2adcosϕ3}0.5. ϕ3=arctan[asinϕ1/( d- acosϕ1) 速度方程-aω1sinϕ1-sω3sinϕ3+s'cosϕ3=0a ω1co s ϕ1+s ω3cos ϕ3+s 'sin ϕ3=0 s '=a ω1sin(ϕ1 -ϕ3) ω3=-a ω1cos(ϕ1 -ϕ3)/s 刀刃位置:x E =a cos ϕ1+ecos ϕ3 y E =a sin ϕ1+esin ϕ3 x F =d-fcos ϕ3 y F =-fsin ϕ3 刀刃速度:x E '=-a ω1 sin ϕ1-e ω3sin ϕ3 y E '=a ω1cos ϕ1+e ω3cos ϕ3 x F '=f ω3sin ϕ3 y F '=-f ω3cos ϕ32、 机构尺寸设计已知刀刃结构尺寸e 、d 。
电气设计任务书-飞剪(0728)

一、用途切头飞剪用于将运行中的钢坯切去头部和尾部,以便钢坯顺利进入精轧机,并且可以提高成品的头、尾质量。
二、结构设备组成切头飞剪采用转鼓式结构,由一台750kW交流电机通过齿式联轴器与主减速机相连,主减速机输出端通过鼓形齿联轴器与下转鼓相连。
上下转鼓间由同步齿轮相连。
当电机转动时带动下转鼓转动,上转鼓也同时转动,由装在上下转鼓上的剪刃剪切带坯。
上下转鼓经双列园柱滚子轴承装到机架内,机架通过预紧螺栓与底座把合一起(见图1)。
图1 飞剪结构简图三、技术数据结构形式:转鼓式剪刃布置:双剪刃90°轧件断面尺寸:34×1430 (管坯钢)40×1580 (普炭钢)最大剪切力: 6500kN剪切力矩: 1750kNm剪切温度:900℃-1050℃(管坯钢)870℃-1050℃(普炭钢)剪切速度:0.5-2m/s剪刃重叠量: 8mm剪刃长度: 1700mm转鼓中心距: 1000mm剪刃回转半径:max.504mm剪刃间隙:0.6-0.9mm材料剪切强度极限: 115 N/mm2(管坯钢900℃时)100 N/mm2(普炭钢900℃时)最大切头长度: 300mm切头长度误差:±30mm折算到电机轴上的转动惯量: 285kgm2(不包括电机)主电机:Z560-2P 750kW n=0-600r/min主减速机速比:i=22.0848四、工作方式飞剪剪前辊道运送钢坯。
剪前导尺使钢坯对中。
测速辊测量出带坯的速度,然后反馈至控制系统控制转鼓速度,使带坯的运行速度与剪切速度相匹配(切头时剪刃水平分速度超前带坯速度1%-5%,切尾时剪刃水平分速度滞后带坯速度1%-5%)。
在不剪切时,剪刃处于等待位置,就是剪刃的静止位置,在此位置上带钢通过飞剪,而剪刃则由冷却水进行冷却。
除了切头切尾外,剪刃均处于该位置。
此时切头剪刃处于270°,切尾剪刃处于180°(见图2)。
图2 剪刃等待位置(通钢位置)(从操作侧看)当飞剪得到切头的指令后,首先将切头剪刃转到240°,该位置就是剪刃的起动位置,当飞剪得到切头起动的指令后,切头剪刃即从240º位置起动加速,在17.75°开始进入剪切,至0°剪切完成,在-20°位置开始制动,在130°位置制动结束,然后再返回到270°等待位置,等待下一个切头指令,再重复以上全过程(见图3)。
冷连轧斜剪刃飞剪结构分析及优化

现代机械与科技2019年第2期中国机械MACHINE CHINA0引言冷连轧机组滚筒式飞剪位于出口区,转盘卷取机之前,承担机组分卷的重要任务。
根据机组指令,将连续轧制出的无头带钢,在不停机的状态下,按照卷重或者卷径进行在线高速分切,以满足生产线下道工序或用户对钢卷的分切要求。
目前,常见的冷连轧滚筒飞剪有三种结构形式,按照剪刃形式分为:直剪刃滚筒飞剪、螺旋剪刃滚筒飞剪及斜剪刃滚筒飞剪。
斜剪刃飞剪由于更加轻便,加工制造成本低,已成为主流机型。
1 斜剪刃滚筒飞剪结构介绍斜剪刃滚筒飞剪主要由电机、减速机、斜齿轮、机架、上下转毂、剪刃间隙调整装置等机构组成(见图1)。
上下转毂两端支撑在机架孔内的轴承上,下转毂通过联轴器与减速机输出端相连,上转毂通过传动侧齿轮与下转毂同步动作。
齿轮为斜齿,配合剪刃间隙调整装置来实现剪刃侧隙的调整。
1.电机2.传动减速机;3.传动斜齿轮;4.机架;5.转毂;6.剪刃间隙调整装置图1斜剪刃滚筒式飞剪结构示意图下文从主副齿结构、剪刃间隙调整、防打刀装置、结构间隙消除等几个方面对该飞剪结构特点进行详细介绍:1.1 主副齿结构目前常用的斜剪刃滚筒飞剪主副齿结构有两种:单斜齿轮副结构和组合斜齿轮副结构。
下面分别进行介绍:1.1.1单斜齿W 轮副结构单斜齿轮副结构包括上转毂、下转毂及布置在转毂两侧的两对单斜齿轮副(见图2)。
装配时,先将下斜齿轮定位,调整上转毂两侧的斜齿轮,加大两齿轮间距,使传动侧上齿轮左端面与下齿轮齿面贴紧、操作侧上齿轮右端面与下齿轮齿面贴紧,齿轮副间隙则被完全消除,此时操作侧斜齿轮为主齿,传动侧斜齿轮为副齿。
另有一种方法是加大两齿轮间距,使传动侧上齿轮右端面与下齿轮齿面贴紧、操作侧上齿轮左端面与下齿轮齿面贴紧,齿轮副间隙被完全消除,此时传动侧斜齿轮为主齿,操作侧斜齿轮为副齿。
两种调整方法具有相同的效果,均能使齿轮副间隙完全消除。
图2 单斜齿轮副结构示意图1.1.2组合斜齿轮副结构组合斜齿轮副结构包括上转毂、下转毂及布置在转毂两侧的两对组合斜齿轮副,每对组合斜齿轮副中,由两个上斜齿轮与一个下斜齿轮啮合组成,两个上斜齿轮之间设置有可调整厚度的垫片。
飞剪机构设计讲稿(new)(11年2)共46页

3.刀刃刀刃位位予置置选应确同机定时架考倾虑刀角刃重4合(量=1h 0, 及上下刀刃水平使速曲度基柄本与相等机的架要求共。线
1
2
A
b 2
C
3
a B
4
c
eF
E
3
f
y h
h
D
P P34 24
x
4
图7
11
fdc o4 sh
e(f h)2(da)22(f h)d (a)c o41/s2
E
a LCE e
2
2
3
L 4
E F h
1 3 f
h
c
分别由BEC和
1
D P34(P24)
DFC求出1和2 x
图8
12
5.调整上下刀刃水平速度误差
(调整机架倾角4)
12
1
y
V E=V C+V EC V F=V C+V FC
若E=90,
2 C
Aa
B
b
13
1
y
E = E -90
Aa
LCE
4 = 4 - E
B
2 b C
2
e 2
h E F h
3
L 4
E
1
f
3
c
1 = 1 - E
D P34(P24)
2 = 2 - E x
图8
3 = 3 - E
13
6,曲柄半径的调整
由于VB未知,故作如下假设:
k1=vB/v刀---------曲柄销的速度与上下刀刃平均水
平速度之比。
八杆飞剪机构设计方案
八杆飞剪机构设计方案咱来唠唠八杆飞剪机构的设计方案哈。
一、设计目标。
首先呢,咱得明确这个八杆飞剪机构是要干啥的。
那肯定是要像个超级剪刀手一样,快速又精准地剪断东西呗,比如说金属板材或者卷材啥的。
这就要求它剪东西的时候,既要有足够的剪切力,又得能在合适的时间和位置下刀,就像大厨切菜得切得恰到好处。
二、机构选型。
1. 八杆结构的确定。
为啥是八杆呢?这就好比组建一个篮球队,每个队员(杆件)都有自己的作用。
八杆结构能够提供比较复杂又稳定的运动关系。
多几根杆,可以让整个机构在运动的时候更加灵活多样,能满足不同的剪切需求。
这八根杆可不是随便凑在一起的。
咱们得像搭积木一样,把它们组合得合理又牢固。
2. 杆件的材料选择。
对于杆件的材料,这就像给战士选武器一样重要。
如果是用来剪比较薄的材料,像纸张之类的(开个玩笑,飞剪一般不剪纸啦),那可能铝合金就够了,轻便又便宜。
但要是剪金属板材,那就得选高强度的钢材了,比如45号钢之类的,这样才能承受住剪切时的巨大力量,不至于在干活的时候“胳膊折了”。
三、运动分析。
1. 轨迹规划。
这个飞剪的剪切刃啊,得像个听话的小宠物一样,按照我们规定的路线走。
我们要设计好它的运动轨迹,就像给它画好跑道一样。
这个轨迹得保证在剪切的时候,刀刃能垂直地切入材料,而且在剪切前后能快速地离开,不能在那儿磨磨蹭蹭的。
比如说,在卷材向前运动的时候,飞剪的刀刃要先加速到和卷材速度差不多,然后“咔嚓”一下剪下去,再迅速减速回到初始位置,准备下一次剪切。
这就像运动员跑步,起跑、冲刺、减速,每个环节都得控制好。
2. 速度和加速度分析。
速度可不能太慢了,不然就不叫飞剪了。
但是也不能太快,太快了机构可能会散架或者控制不住。
要根据剪切材料的速度和厚度来确定飞剪刀刃的速度。
加速度也很关键呢。
如果加速度太大,机构会受到很大的冲击力,就像开车突然猛踩油门一样,对车(机构)不好。
所以要合理地规划加速度,让机构在平稳的状态下完成快速的剪切动作。
飞剪机剪切机构的运动设计
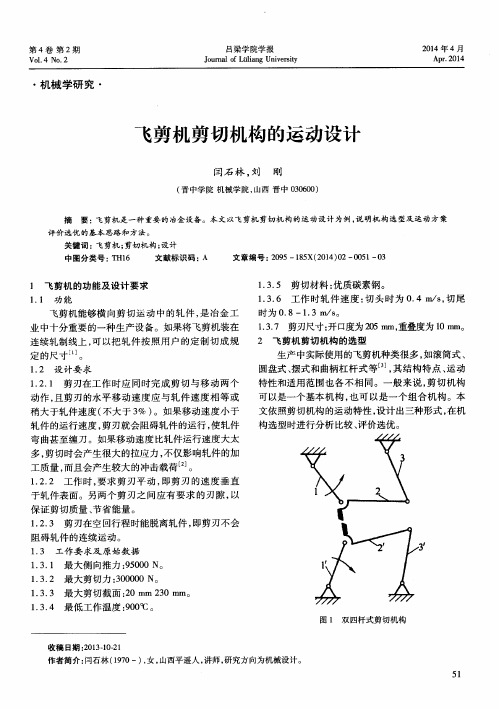
件, 使得 轧件 断 面平 直 , 提 高加 工质量 。该 方案 的缺 点是结 构 比较复 杂 , 机 构 整 体质 量 大 , 惯性力大 , 因
此只适用于运动速度较低的场合 。
2 飞 剪机 剪切机 构 的选型
生 产 中实 际使用 的飞 剪机种 类很 多 , 如 滚筒式 、 圆盘式 、 摆 式和 曲柄 杠 杆式 等 J , 其结 构 特 点 、 运 动 特性 和适用 范 围也 各 不 相 同 。一 般来 说 , 剪 切 机 构
1 . 2 . 1 剪刃在 工 作 时 应 同时 完成 剪 切 与 移 动 两 个
时为 0 . 8—1 . 3 m / s 。
飞剪 机能 够横 向剪 切 运 动 中 的轧 件 , 是 冶 金 工
业 中十分重要 的一种生产设备。如果将飞剪机装在 连续 轧制 线上 , 可 以把 轧件 按 照用 户 的定 制 切 成 规
定 的尺 寸 。
1 . 2 设 计要 求
1 . 3 . 7 剪刃尺寸 : 开 口度为 2 0 5 m m, 重叠度为 1 0 m m。
轧件 的运行 速度 , 剪 刃就会 阻碍轧 件 的运行 , 使 轧件
弯 曲甚 至缠 刀 。如果 移动 速 度 比轧件 运行 速度 大太
多, 剪切时会产生很大的拉应力 , 不仅影响轧件 的加
工 质量 , 而 且会 产生 较大 的 冲击载 荷 。 I . 2 . 2 工作 时 , 要求剪刃平动 , 即剪 刃 的速 度 垂 直 于轧件 表 面 。另两 个 剪 刃 之 间 应 有要 求 的刃 隙 , 以
飞剪地机构分析报告与设计
图 1飞剪机构分析与设计任务书一.工艺要求1.剪切运动速度为V t =2m/s 的钢板,拉钢系数δ=V刀/ V t =[δ],[δ]=1.01~1.052.两种钢板定尺(长度)L=1m; 0.65m ; 3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰); 4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差: ΔV 刀≤0.05=[ε]二.给定参数1.工艺参数剪切力F=10T=98kN;支座A 距辊道面高约为 h ≈250mm(如图1);h ≈5mm;钢板厚度Δb=1mm;2.机构设计参数 按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:∆V 刀=2|V Et -V Ft |/(V Et +V Ft )≤ [ε] = 0.05.3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数δ>1: V 刀= (V Et +V Ft )/2;δ= V 刀/ V t =[δ] =1.01~1.05. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h ≈250mm刀刃重合量Δh ≈5mm 钢板厚度Δb=1mm2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角γ2、摇杆摆角ψ如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械原理课程设计》廖汉元孔建益闻欣荣李佳编撰武汉科技大学机械自动化学院机械设计与制造教研室1999年5月(02年再版)飞剪机构分析与设计任务书一.工艺要求1.剪切运动速度为V t=2m/s的钢板,拉钢系数=V刀/ Vt=[],[]=~2.两种钢板定尺(长度)L=1m; ;3.剪切时上下剪刃有间隙,剪切后上下剪刃不发生干涉(相碰);4.剪切时上、下剪刃沿钢板运动速度方向的速度相对误差:ΔV刀[]二.给定参数1.工艺参数图 1剪切力F=10T=98kN;支座A距辊道面高约为 h250mm(如图1);刀刃重合量Δh5mm;钢板厚度Δb=1mm;2.机构设计参数按定尺L=1m给出机构的行程速比系数k 、远极位传动角2、摇杆摆角:表1 参数与方案三.设计内容1.根据工艺要求制定机构方案,定性比较各方案的优、劣;2.设计出满足工艺要求的机构尺寸及上下剪刃的位置尺寸;3.根据最终设计结果按比例绘制机构运动简图及上下剪刃的轨迹;4.进行机构的运动及力分析,检验上下剪刃的速度相对误差、拉钢系数是否满要求,并求出曲柄上的平衡力矩M b《飞剪机构分析与设计》指导书二,对剪机运动的要求:1.曲柄转一圈对钢材剪切一次;2.剪切时,上、下剪刃速度相对误差小于其许用值:V 刀=2|V Et -V Ft |/(V Et +V Ft ) = .3.剪切时,上下剪刃应与钢材运动同步。
一般希望剪刃速度略大于钢材运动速度,即拉钢系数>1:V 刀= (V Et +V Ft )/2;= V 刀/ V t = =~. 4.能调节钢材的剪切长度L三,设定参数1.工艺参数剪切力F=10T=98kN 支座A 距辊道面高约为h 250mm刀刃重合量Δh5mm 钢板厚度Δb=1mm 2.机构设计参数按定尺L=1m 给出机构的行程速比系数k 、远极位传动角2、摇杆摆角如表1所示。
四.机构的型综合首先对工艺要求进行分析,把工艺要求变换为对机构运动的要求,然后根据对机构的动作要求进行型综合。
1.工艺对机构的动作要求:(1)为完成剪切,上下剪刃应完成相对分合运动;(2)为剪切运动中的钢材,上下剪刃在完成相对分合运动的同时还应有沿钢材方向的运动;(3)根据以上要求可知,上下剪刃运动轨迹之一应为封闭曲线(如图3a )、b)、c)所示)。
图3 d)上下刀刃均为非封闭曲线,使得飞剪在空行程中沿钢材运动方向逆向剪切,这是不允许的。
2.机构型综合的方法及一般原则(1)固定一个构件为机架,可得到一个全铰链机构。
(2)可用移动副直接代替转动副而得到带有移动副的机构。
(3)具有两个转动副的一个构件可变换成一个高副。
图 3a)b)c)d)(4)最简单机构原则。
首先采用最简单的运动链进行机构综合,不满足要求时才采用较复杂的运动链。
(5)最低级别机构原则。
一般采用多元连杆为机架不易得到高级别机构。
(6)不出现无功能结构原则。
(7)最低成本原则。
加工易难及加工成本按如下顺序递增:转动副、移动副、高副。
(8)最符合工艺要求原则。
表2、3和图4、5给出F=1、F=2各类运动链及其结构图,作为进行机构变换的依据。
图4 F=1的运动链结构图表2单自由度运动链表3两自由度运动链图5 F=2的运动链结构图[机构变换例]:选用图4中最简单的F=1的四杆运动链进行机构变换。
如图6 a)所示以AD为机架;CD 为滑块、D为移动副(图6 b);上、下刀刃分别装在曲柄、滑块上(图6 c)。
方案分析:方案满足上、下剪刃运动轨迹之一应为封闭曲线的运动要求。
其最大的优点是结构简单。
但存在如下突出缺点:①横向尺寸大。
偏距大、连杆长度短将使机构压力角增大。
为减小压力角,必需增大连杆长度BC;②调节钢材定尺困难。
定尺调短时曲柄转速增高,为使刀刃速度与钢材速度V同步,必需减小曲柄半径AB和刀刃E的转动半径AE(图中的AB、tAE)。
由于剪切点由点K上移到K,因此必需将钢材抬起方能进行剪切,这是不允许的。
此为一个坏方案。
可见上刀刃不能装在曲柄上。
DBc)图6 曲柄滑块机构的飞剪五.机构尺度设计分两步进行:1.四杆机构的相对尺寸设计;2.计算四杆机构的绝对尺寸。
1.四杆机构的相对尺寸设计(见“机械原理”P126)已知参数:k, 2, .计算机构的相对尺寸a,b,c, d=1.B 1 0图 72.计算四杆机构的绝对尺寸(1)曲柄半径a剪切钢板一次所需的时间t :t=L/V t (s)曲柄的转速n 1和角速度1:若曲柄销的速度为V B ,则曲柄半径a 为:a=V B /1.设:k 1=v B /v 刀 (k 1为曲柄销B 点的速度与刀刃平均速度之比)V B =k 1V 刀=k 1[]V t .由此得到:a=k 1 []V t /1,或 a=k 1 []L/(2) (2)C)图 8初步设计时k 1可任选。
(*机构初步设计完成后再重新确定k 1)2 四杆机构的绝对尺寸相对尺寸为:a 0 , b 0 ,c 0 ,d 0 。
绝对尺寸为:a ,b ,c ,d:求比例尺L =a/a 0。
得绝对尺寸:a=L a 0, b=L b 0, c=L c 0, d=L 。
3.刀刃位置确定如图8所示,取机架角4=10且使曲柄与机架共线的机构位置来确定刀刃位置尺寸,这是考虑到:可得到刀刃重合量Δh ,且此时有v Ft v Et (此时连杆的绝对瞬心在D 点且有2=3)。
若计算出f 、3、e 、2,即确定了刀刃F 、E 的位置。
f=dcos 4-h (3) e={(f-Δh)2+(d-a) 2-2(f-Δh)(d-a)cos 4}. (4)初步计算3、2:3=4+Δ。
Δ由ΔBCD按余弦定理求出。
3求出后可由ΔBDE和ΔBDF求出L CE、L CF。
然后由ΔBCE按余弦定理求出2。
注意到点E、F应满足重和,即LCE =LCF。
故令L CEF =(LCE+LCF)/2 (5)按长度LCEF 及尺寸b,e,c,f重新计算2*、*34.剪切角1(0)的确定:剪切角1(0)即剪切时所对应的曲柄转角。
由图9知:1(0)=4DAB.DAB由ΔADB按余弦定理求解。
长度LBD由ΔBE(F)D求得,ΔBED的角=BEC+DEC。
BEC、DEC分别由ΔBEC、ΔDEC按余弦定理求解。
C图 9 5.调整上下刀刃水平速度误差当曲柄转角1=1(0)时飞剪对钢材进行剪切。
此时若上、下刀刃E、F沿钢材方向的速度误差太大,则出现倾斜的钢材切口,甚至不能切断钢材。
因此必需调整某参数以控制上、下刀刃的速度误差。
上、下刀刃的速度可写成如下矢量方程:V E =VC+VECV F =VC+VFC若VEC、VFC垂直于钢材运动方向(即CE(F)线与钢材运动方向平行),则其在钢材运动方向的分量为零,VE 、VF沿钢材的分量即VC沿钢材的分速度而相等。
故计算CE(F)的位置角E,再使整个机构沿顺时针转动以使CE(F)线与钢材运动方向平行。
即调整机架倾角a4使上、下刀刃的速度误差为零。
先对机构进行运动分析求出2角(参考《机械原理》p29p30),再由矢量多边形方程BE=BC+CE由下式求E角:tan =[esin()-bsin]/[ecos()-bcos] (6)E =E-90 (7)E即整个机构沿顺时针转动的角度。
按下式计算机构转动后的机架倾角和各构件的位置角:4 =4-E(0)1= (0)1-E2 =2-E3 =3-E6,调整刀刃与钢材运动速度同步先进行运动分析求出2、3,再由矢量方程AE=AB+BE求上、下刀刃沿钢材方向的速度分量VEt =yE、VFt=yF(机构的运动分析参考《机械原理》p29p30)。
求出上、下刀刃沿钢材方向的平均速度V刀及拉钢系数:V 刀=(VEt+ VFt)/2 (8)= V刀/ Vt(9)一般,即上、下刀的速度不满足拉钢系数的要求。
由于曲柄转速不能调整故应调整曲柄半径。
初定曲柄半径a时公式中的k1(为曲柄销B点的速度与刀刃平均速度之比)是任意选定的,故应按下式计算出实际的k1*值后重新计算曲柄半径a*:k1*=a1/ V刀,(10)a*=k1*[]Vt/1,或a*=k1*[]L/(2) (11)为保证原始给定参数2、k 、不变,各长度尺寸应作如下调整:b=, c=d=e=f=由此得到满足给定设计要求的机构尺寸为带*的参数,其剪切角为(0)1。
7,求曲柄的平衡力矩M b如图8所示,按瞬时功率法求曲柄的平衡力矩M bM b1-F c V Ex +F c V Fx =0M b =F c (V Ex -V Fx )/ 1 (12)六.机构设计性能校验(用带*号尺寸计算)1,检验剪切( (0)1 )时,上下刀刃对刀误差:2,检验剪切时上下刀刃是否与钢材运动速度同步(;3,检验剪切时上下刀刃速度的相对误差v 刀4 ,检验机构是否达到给定设计要求(k 、2 、 )5,从结构尺寸、传力性能等方面与方案5比较其优劣。
(作方案5的与方案1比较))/(2)/(2F E F E F E F E y y y y y x x x x x +-=∆+-=∆图 9七.设计的内容及要求(一)设计说明书内容(仅供参考)1,设计任务(题目;具体设计内容);2,飞剪的工作原理及工艺要求;3,原始数据(工艺参数;设计参数);4,机构型综合(型综合原理;工艺对机构动作的要求;三种方案的比较:本计算方案、自己的方案、小组内自选一方案);5,机构的尺寸设计(四杆机构相对尺寸计算;刀刃位置尺寸及剪切角的确定方法;机构绝对尺寸计算及调整的原理与方法;最终设计结果);6,机构的平衡力矩计算;7,主要结论(与方案5(1)比较列出机器的尺寸参数及性能;从机器的尺寸大小、机重、传力等方面比较本方案的优缺点);8,结束语(设计心得与体会)9,参考文献(作者.文献名.出版社.出版年月.卷期号[或页号])(二)设计的具体要求1,按自己的设计绘制机构型综合3 图一张。
要求:1)如何从运动链变换得到;2)按合理的比例绘制机构简图;3)按比例画出上下刀刃的轨迹并判断方案的合理性;分析优缺点。
4)图面填充率不小于75%,文字用仿宋体书写。
2,按机构设计的最终尺寸,按比例绘制机构图(2图)及上下刀刃的轨迹。
要求:1)标出尺寸、运动副、位置参数等的代号,列表标出其数值;2)以X为起始位置将曲柄圆周等分为12等分,图解求点E、F的轨迹(加剪切点共13个点位); 3)列表标出点E、F坐标的图解值与理论值及其相对误差(%)。
4)图面填充率不小于75%,文字用仿宋体书写。
3,设计说明书用钢笔书写、文字清晰端正、内容完整精炼流畅。
不少于15页;4,阐明原理,方法时应配有示意图(用铅笔仪器绘制);5,将设计说明书及两张图纸装订后粘贴封面。
[附录:机构设计的优化方法]机构设计的优化方法是一种适应性很强的设计方法。