基于CAN总线的田间作业机车工况数据监测系统设计与实现概要
基于CAN总线的机车实时监控系统
基于CAN总线的机车实时监控系统
谭刚
【期刊名称】《《可编程控制器与工厂自动化(PLC FA)》》
【年(卷),期】2005(000)005
【摘要】介绍一种基于 CAN 总线的机车实时监控系统,系统由数据采集单元(模拟量、数字量、开关量)、车载控制单元以及地面控制中心组成。
论文详细介绍了系统的硬件结构和主要软件流程。
上位机协调三个数据采集模块工作,并通过 GPRS 的短消息(SMS)业务,上位机将机车运行数据(包括牵引电机电压、电流)实时发送到地面控制中心,地面控制中心实时监控机车运行状态。
【总页数】4页(P70-73)
【作者】谭刚
【作者单位】西南交通大学
【正文语种】中文
【中图分类】TP277
【相关文献】
1.基于CAN总线的机车通信与监控系统 [J], 李白燕;朱建林;罗伟斌;张建华
2.基于CAN总线的机车实时监控系统 [J], 谭刚
3.基于CAN总线的机车电气监控系统的设计 [J], 叶晶莹;郭其一
4.基于CAN总线机车磨合试验分布式监控系统 [J], 钟旭;李飞燕
5.基于CAN总线的机车运用状态实时监测系统 [J], 陈立功;周军全
因版权原因,仅展示原文概要,查看原文内容请购买。
农田作业机车工况远程数据传输系统设计论文
农田作业机车工况远程数据传输系统设计论文第1篇:农田作业机车工况远程数据传输系统设计论文随着通信技术的不断进步,无线通信网络已覆盖在各个领域,从有线通信到无线通信有了进一步的跨越。
有线网络难以摆脱线缆束缚,在田间布线耗时耗精力,维护起来也不够方便,为了节省精力和时间,提高田间机车工作的数据传输可靠*及稳定*。
因此,选用gprs技术对田间作业机群信息进行远程数据传输,实现机车作业状态、作业环境、地理环境等*[1],这样系统可以实时准确对田间机具运行状态和数据进行*,同时工作人员能随时对田间作业机车进行远程控制,还能通过上位机对读取的数据进行分配、组合和集中管理提供了可靠的依据。
这样一来为工作人员节省了大量的时间,也能及时地了解田间机具的工作状态。
因此利用此技术也能够提高现代农业的工作效率和经济发展等方面有着重要作用。
1系统整体方案系统主要研究微控制器、gprs通信网络和数据中心三部分组成。
传感器采集到数据经过a/d转换以及相关处理后发送到stm32微控制器,stm32通过串口将数据发送到gprssim900a模块,gprs无线数据传输系统与数据中心之间一般可通过http协议建立数据连接。
将数据经gprs空中接口接入无线网络,并由移动通信连接到网络,通过网关到达远程数据中心,数据中心接受数据将其分类整理储存等。
2stm32芯片特*意法半导体推出的stm32系列32位微未完,继续阅读 >第2篇:网络传输系统设计论文1网络结构设计1.1网络结构总体方案网络结构是整个系统的基础,网络结构的设计直接关系到整个网络的传输质量、业务拓展及运营服务质量。
目前,网络结构的设计已从电缆向光纤,从模拟向数字化、宽带化、智能化趋势发展。
网络拓扑结构主要分星形网、树形网及环形网,一个网络一般由多种网络结构组合而成,为达到较高的可靠*拟采用环形+星型网络拓扑结构,在主干段以及配线段用光传输系统实现光纤到楼,再建同轴电缆和双绞线重叠网作为用户引入。
基于 CAN 总线的拖拉机作业数据解析
0 引言
随着我国现代信息 电子技术 的发展 及其应用 领 域的延伸 , 应用在我 国农林 车辆和机具上 , 的电子技 术设 备 也越 来 越广 泛 。在 农 林 车 辆 和 机 具上 , 电子 技
总线 具 备 以下1 0 k m) ; ③ 传输 速率高 ( 最高 可达 1 M b i t /
s ) ; ④基于优先级 的无破坏性逐位 仲裁 ; ⑤ 远程数据 请求 ; ⑥错误检测和 出错 处理 ; ⑦ 节点故 障不妨碍 总
止, 国 际上 已经 先后 出现 诸 如 D I N 9 6 8 4 、 I S O 1 1 7 8 3 、 S A E J I 9 3 9 、 C A N o p e n及 D e v i c e N e t 等基于 C A N协议 标
线 因其优 异 的功 能特 性 得 到 广 泛 的 应 用 , 相 应 地 在 农
种 可靠 性好 、 性能 高、 开 发 简 便 并 且 成 本 较 低 的现
场 总线 , 在 国 内外 已经 得 到 普 遍 的 应 用 , 也 是 在 我 国
应 用 最早 的现 场 总线 之一 。在 汽车 制 造 中 , C A N总
收 稿 日期 :2 0 1 4 一】 1 — 1 0
有 优 越 的可 靠性 、 实时 性 和灵 活 性 , 国 内许 多 科研 机 构 正 在 将 C A N 总线 应 用 于 农 林 车 辆 各 个 系 统 中 。农 林 车 辆
基于CAN总线的田间作业机车工况监测系统

Ba s e d o n CAN Ba s
Xu Qi a n h u P , L i a n g Ch u n y i n g L Z h u L i n g l i n g 1 , Wa n g Y u a n d o n g
( 1 . C o l l e g e o f I n f o r ma t i o n a n d T e c h n o l o g y , He i l o n g j i a n g B a y i A g r i c u l t u r a l U n i v e r s i t y , D a q i n g 1 6 3 3 1 9 ;
Dec .2 O1 5
1 2 月
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 2 - 2 0 9 0 . 2 0 1 5 . 0 6 . 0 1 8
基于 C AN总线 的田间作业机 车工况监测 系统
徐千 惠 。 梁春 英 , 朱 玲玲 , 王元冬
C A N总线传输方式将数据传输 到数据 发送 端。 数据发送端对信息采集端上传 的数据进行整合 和打包 后 , 通过 G P R S 无线传输 到上位机 。上位机可 以实时 的对机车运行信息进行监测 和存储 , 为实现 田间作业机车精准作业提供 了依据 。 关键词 : C A N总线 ; G P S ; 单片机 ; 油箱温度 ; 田间作业机车
第2 7卷 第 6期
2 01 5笠
黑 龙 江 八 一 农 垦 大 学 学 报
J o u r n a l o f H e i l o n g j i a n g B a y i A g i r c u l t u r a l U n i v e r s i t y
基于CAN总线技术的油井智能数字监测系统设计

基于CAN总线技术的油井智能数字监测系统设计卞哲英;高超【摘要】结合油气井地面现场数据的采集与监测,介绍了基于现场总线技术的油井数字智能采集监测系统的构成及各部分功能.阐述了CAN现场总线技术和数字智能传感器在数据采集系统中的应用.【期刊名称】《承德石油高等专科学校学报》【年(卷),期】2014(016)006【总页数】4页(P49-52)【关键词】数据采集;现场总线;智能变送器【作者】卞哲英;高超【作者单位】承德石油高等专科学校计算机与信息工程系,河北承德 067000;承德石油高等专科学校计算机与信息工程系,河北承德 067000【正文语种】中文【中图分类】TP391 应用背景在油气井的勘探开发过程中,需要及时准确的获得储层真实的天然气或原油产能、流体性质、地层参数等资料,以便能对被测试井作出一个比较正确的评价,并为今后该井所处的油气田区块的勘探开发提供理论依据。
因此取全取准各种资料数据在测试流程系统中占了非常重要的地位。
为了准确地录取现场资料,实现自动化地面计量,及时快速地传递数据,提高现场资料传递的实时性和连续性,设计开发了基于总线技术的油井智能数字监测系统。
该系统采用先进的计算机技术、传感技术以及网络技术实现对油井地面数据的远程实时的自动采集与监测[1]。
2 总体设计思路本采集监测系统,采用现场总线技术,利用总线智能压力变送器、总线智能温度变送器、总线智能差压变送器以及各种流量计等电子仪器仪表,结合先进的数据采集软件,构建的基于现场总线技术和智能传感技术相结合的智能数字监测系统,实现井口、油嘴管汇、加热炉、三相分离器等地面计量设备的压力、温度、油气水产量等几十个现场数据的自动采集和录入[2-4]。
所有的数据可以以数字或曲线图的形式显示出来,可以按需要生成各种报表,可以将数据进行实时打印,可以按指定的格式存储到硬盘,还可以实现多种流量测量计算,为油气田公司的决策提供科学的依据。
油井智能数字监测系统应用于高压深井放喷测试作业,必须能安全、准确、全自动获取详尽的测试资料并加以处理和输出,避免测试时人为读取数据的误差及各资料录取时的不同时性。
基于CAN总线的车载记录系统的设计与实现
基于CAN总线的车载记录系统的设计与实现
单彦虎;甄国涌;李圣昆
【期刊名称】《仪表技术与传感器》
【年(卷),期】2010(000)009
【摘要】介绍了以CAN总线为技术背景,半导体存储器为存储介
质,LabWindows/CVI为软件开发平台的车载数据记录系统.该系统通过C8051F60单片机内置的CAN模块来构建一个CAN总线型网络,以实现对发射车辆各种故障信息的记录和在线检测.文中详细阐述了该系统的硬件和软件设计方法和诊断分析软件的实现.结果证明,该记录系统完全满足实际工程需求,具有很高的可靠性,并且已成功运用于某大型车载故障诊断项目中.
【总页数】3页(P40-42)
【作者】单彦虎;甄国涌;李圣昆
【作者单位】中北大学电子测试技术国家重点实验室,山西太原,030051;中北大学电子测试技术国家重点实验室,山西太原,030051;中北大学电子测试技术国家重点实验室,山西太原,030051
【正文语种】中文
【中图分类】TP277
【相关文献】
1.基于STM32的车载定位记录系统设计 [J], 唐彬;杨会玲
2.基于K/CAN总线的蓝牙车载诊断仪设计与实现 [J], 陶鹏;叶桦;徐丽娜
3.基于红外图像采集技术的车载预警记录系统设计与实现 [J], 许美珏;李庆;陈刚
4.基于CAN总线的车载测量系统设计与实现 [J], 王俊华; 何乐; 赵银; 夏群生
5.基于CAN总线的汽车事件数据记录系统开发方案研究 [J], 杨曦
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CAN总线的煤矿现场监测站系统设计与研究
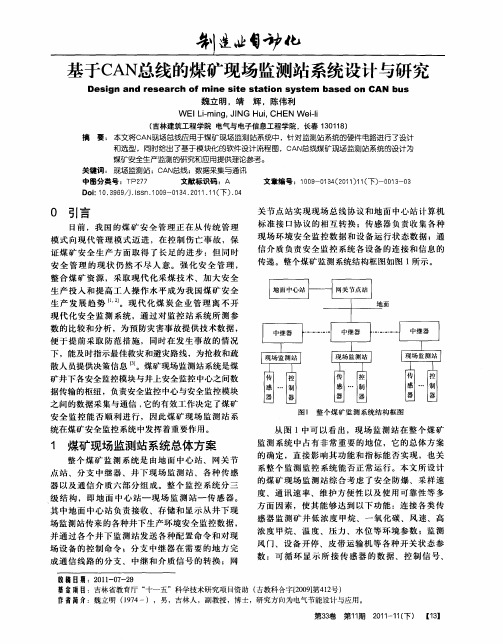
点 站 、分 支 中继介 质六 部分 组 成 。整 个 监 控 系 统 分 三
级 结 构 ,即 地 面 中心 站 一 现 场 监 测 站 一 传 感 器 。 其 中地 面 中 心站 负 责 接 收 、存 储 和 显 示 从 井 下 现
之 间的数 据采 集与通 信 , 的 有效 工作 决 定 了煤 矿 它 安 全 监 控 能 否 顺 利 进 行 , 因此 煤 矿 现 场 监 测 站 系 统在 煤矿 安全 监控 系统 中发 挥着 重要 作用 。
图 1 整 个 煤 矿 监 测 系 统 结 构 框 图
从 图 1中可 以 看 出,现 场 监 测站 在 整 个 煤 矿
生 产 投 入 和 提 高 工 人 操 作水 平 成 为我 国煤 矿 安 全 生产 发展趋势 u ’ 现 代 化 煤 炭 企 业 管 理 离 不 开 。 现 代 化 安 全 监 测 系 统 ,通 过 对 监 控 站 系统 所 测参
面
数 的 比较 和分 析 ,为 预 防 灾害 事 故提 供 技 术数 据 ,
1 煤矿 现场监测站系统 总体 方案
整 个 煤 矿 监 测 系 统 是 由地 面 中心 站 、网 关 节
监 测 系统 中 占有 非 常 重 要 的地 位 ,它 的 总体 方 案
的确 定 ,直 接影 响其 功 能 和指 标 能 否 实 现 ,也 关 系整 个 监 测 监 控 系统 能 否 正 常运 行 。本 文所 设 计 的煤 矿 现 场 监 测 站 综 合 考 虑 了 安全 防爆 、 采 样速 度 、 通 讯 速 率 、维 护 方 便 性 以 及 使 用 可 靠性 等 多
务l
訇 化
基于C N 线的煤矿现 场监测站系统设 计与研究 A 总
Desi gn and esear f m i t s aton s r ch o ne sie t i yst em bas ed on CAN bus
田间作业机车工况监测系统设计
本文目的是设计并实现农业机车定位与作业工况
卫星信号接收机采用和芯星通公司生产的北斗 /
收稿日期: 2014 - 09 - 02 基金项目: 研究生创新科 研 项 目 ( YJSCX2014 - Y52 ) ; 国 家 科 技 支 撑
计划项目子项目( MW - 2013 - SJ011 ) ; 黑龙江省教育厅科 学计划项目( 12521373) 作者简介: 辛 德 奎 ( 1987 - ) ,男,黑 龙 江 鸡 西 人,硕 士 研 究 生,( E - mail) 373448207@ qq. com。 通讯作者: 黄操军( 1966 - ) ,男,重庆忠县人,教授,硕士生导师,( E - mail) huangcaojun@ 163. com。
硬 件 系 统 结 构 ,使 用 C 语 言 编 写 了 相 应 的 驱 动 程 序 。上 位 机 软 件 采 用 C #语 言 进 行 编 写 ,通 过 无 线 收 发 模 块 与 硬
件 系 统 进 行 远 程 通 信 ,获 取 田 间 作 业 机 车 的 作 业 工 况 和 环 境 温 湿 度 等 信 息 ,并 且 能 够 对 采 集 的 信 息 进 行 显 示 、存
报文长度受限 ,并 且 通 信 费 用 较 高 ,不 适 合 农 业 应 用 。
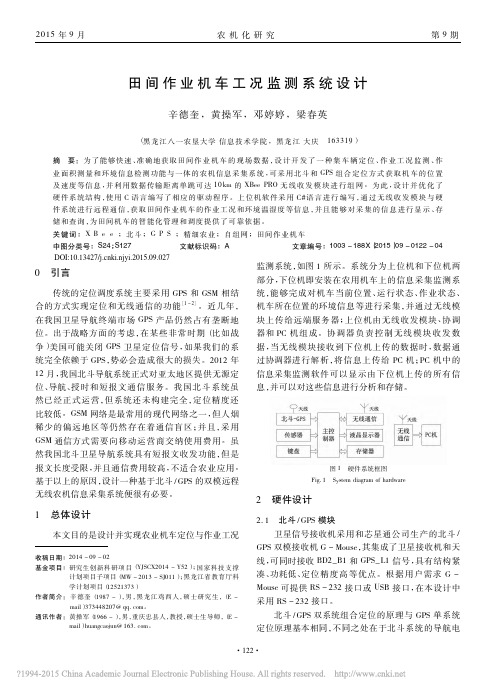
图 1 硬件系统框图
基于以上的原因,设计一种基于北斗 / GPS 的双模远程
Fig. 1 System diagram of hardware
无线农机信息采集系统便很有必要。
2 硬件设计
1 总体设计
2. 1 北斗 / GPS 模块
图 3 电平转换电路 Fig. 3 Level conversion circuit
图 2 G - Mouse 应用电路 Fig. 2 G - Mouse application circuit
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于CAN总线的田间作业机车工况数据监测系统设计与实现摘要农业是维持人民的基本生活的基础,然而农业的发展受到自然环境和农业科技的限制。
大幅度提高土地利用率、劳动生产率,提高整体效率,必须依靠科学技术的进步。
田间作业机车在田间松土、播种、施肥、收割等场合发挥着重要作用,但是随着机车的使用率的增多,与田间作业机车有关的安全事故也不断增加,威胁着机车司机的人生安全。
为了提高田间机车在工作过程中的安全性,以往大多数的方法都是通过与司机电话联系或派人到现场查看来确定机车司机的安全和机车的的位置。
深入研究以往的田间作业机车监测技术,并在此基础上设计并实现了“基于CAN总线的田间作业机车工况数据监测系统”,实现了对田间作业机车的位置、作业面积、油箱温度、机车速度等数据的实时监测,已达到减少田间作业机车在田地工作时出现意外情况的目的。
本论文主要完成了一下几方面的工作:1、系统的分析了田间作业机车工作状态监测技术的发展历史和国内外研究概况,阐述了课题研究的意义和目的。
同时对CAN总线做了深入学习。
2、针对田间作业机车工作时可能出现的安全问题,结合监控系统的设计理念和实际情况,提出了“基于CAN总线的田间作业机车工况数据监测系统设计与实现”设计的总体框架,同时分析了该方案的设计理念,设计的缺点和不足及还需要解决的问题。
3、设计了该系统的硬件部分,由数据采集端、CAN总线传输、和数据发送端等组成,实现了数据的采集、传输和发送。
4、根据系统的设计的需要,设计了“基于CAN总线的田间作业机车工况数据监测系统设计与实现”的软件编程。
包括单片机、GPRS、CAN总线的编程。
5、通过多次试验调试,能够得到田间作业机车工况数据信息,并且可以在显示界面上实时的看到这些工作状态数据。
实验的测试结果表明:实验的数据与参考的数据能够较好的吻合,说明误差较小,具有良好的精度。
同时系统采用了CAN总线技术,减少了错综复杂的布线,提高了稳定性,操作简单,该系统将会提高田间作业机车的安全系数和工作效率,具有很好的应用前景,可以大范围推广使用。
关键词:田间作业机车;CAN总线;传感器;GPS第一章绪论1.1选题的背景和意义农业是保证国家发展和经济稳定的重要依据,随着时代的发展,各国清晰的认识到农业对于国家稳定的重要性。
党在十七届三中全会《中共中央关于推进农村改革发展若干重大问题的决定》一文中明确指出:“积极发展现代农业,提高农业综合生产能力”,深入理解和认识发展现代农业的重要性。
随着信息科学技术和微电子技术的发展,田间作业机车是否可以安全的运行,对于保障田间作业机车司机的生命安全、确保产出的农产品质量、提高农田的经济效益都具有十分重要的意义。
同时我国北方地区常会出现一些极端气候的自然灾害,如持续低温、多雪多雨、气候异常、回暖偏晚等,这些对田间作业机车的正常工作带来了难题,在这样气候的影响下,机车达不到要求的效率[3]。
因此对于北方田间机车作业来说,对田间作业机车的监测是个重要的过程。
机车状态监测是针对机车或者机车部件在工作中的运行状态(如车速、油箱温度,作业面积,耗油量等)进行实时的监控和检测,通过各类传感器(如温度感光器,光感传感器、浮子传感器等)将这些数字信号转换成所需的数字信号或者电信号等,通过有效的传输后在处理器中进行分析和处理,最后将数据进行存储已达到对机车工况监测的目的。
对于田间作业机车工作状态监测技术的研究是保障田间作业机车正常工作的基础条件。
监测系统能对出现故障机车做出快速准确的反应,提高设备的可靠性和智能化调度水平,同时也能够保障田间作业机车司机的生命安全,减少维修费用,为公司减少了经济支出,带来了巨大经济效益。
早期的田间作业机车工况数据监测系统主要在机车的布线中使用价格高昂的模拟信号线,而且每一个传感器需要单独布线,线多而乱,不仅给装机带来麻烦,而且也为以后更新传感器时带来不必要的麻烦。
田间作业机车工况数据监测系统的采集端一般采用无线的传输模式,但是由于车载部分传输距离较近,再加上无线传输的性能不够稳定,农田地里环境恶劣,这些都将限制监控系统的正常工作。
从数据传输的角度讲,无线传输的速度不如有线传输的速度快,这大大的影响了系统的实时性,进而影响监控系统,这一类型的田间作业机车工况数据监测系统已经不能适应现代的农业发展的需求。
现代的田间作业机车工况数据监测系统一般利用计算机、网络、数字通信的技术支持,充分彰显了强大的工作能力和广阔的应用性。
由这样的交叉组合技术组成的监测系统具有很高的可靠性和安全性,田间作业机车司机也可以依靠机车内的设备及时了解机车的内部情况,一旦出现问题,立即采取相应的措施,减少损失。
随着科学技术的发展,嵌入式微控制器MCU(Micro Control Unit)的优越性能凸显出来,应用也越来月广泛。
现代的通信技术日新月异,有线传输也取得了突破性的进展。
这些技术都为田间作业机车工况数据监测系统提供了强有力的技术支持。
1.2国内外发展现状新世纪以来,一些发达国家为了达到农业高效率和高产出的目的,开始着手于田间作业机车工况数据采集监控系统的研究与实践,与之相关企业也先后开发了各有特色的田间作业机车工况数据采集监控系统,CAN总线技术就是监测系统的重要组成部分。
CAN总线是一项以计算机、智能传感和数据通信为主的综合性技术,在当代的自动化控制领域发展迅速,被誉为自动化领域的局域网。
CAN总线(Controller Area Network)最早是由德国Bosch公司在1986年提出,它具有性价比高、传输速度快、实时性和可靠性强等特点,当时普遍适用于解决汽车问题,现如今已经被广泛运用到自动控制、楼宇自动化、医学设备等各个领域。
随着CAN总线在各个领域的广泛使用,国际上也对CAN总线的通信格式提出了更加严格的要求,1991年在各方的共同努力下CAN总线技术规范(Version2.0)制定完成并正式发布。
此外“现代农业靠科技,科技使用靠农机。
”得益于我国大力推进农业现代化、农业信息化和农业机械化的国家政策。
有效的采用田间作业机车工况数据监测,可以使田间作业机车达到高效率、低功耗的目的,更大的促进农业高效生产和农业经济的发展,在未来的中国,田间作业机车工况数据监控市场应用前景将十分广阔。
1.2.1国外发展现状及趋势凯斯-纽荷兰Winner系列电子系统、8030系列的电子信息系统、迪尔Intellitrak电子仪表系统,道依兹Agrotronic-l电子驾驶操纵系统、福格森的Autotronic系统和Datatronic 系统等[6],这些装置主要控制田间作业机车的常规信息参数、液晶图形显示、超声光报警、和控制随机性能参数(机车实际前进速度、工作时间、发动机和动力输出轴(PTO)转速、机车作业面积、作业效率及滑转率等),还具有优化驾驶操纵方案、故障诊断和报警、前驱动、差速锁上和动力输出轴(PTO)自动控制等功能。
国外田间作业机车大多安装机载计算机系统。
功能是采集和分析处理机车作业过程中传感器采集回来的信息参数,这些信息参数主要包括发动机转速,PTO转速、作业行驶速度、打滑率等。
为了促进CAN总线以及CAN总线协议的进一步发展,欧洲于1992年成立了CiA(CANin Automation)。
在CiA的作用下,CAN总线技术在纺织机械、汽车电子控制系统、电梯控制系统、安全监控系统、医疗仪器、船舶运输和航空航天控制等方面均得到了广泛的应用[7]。
CiA现在有全世界400多家公司加入其中,如今CiA已经是全球应用CAN总线技术最权威的机构。
根据国外资料报道,CAN总线技术已广泛的应用于家用电器、智能楼宇以及小区建设中。
它的每个节点都可以随机的访问,通信速度能够满足要求。
一些网关如CAN总线与TCP/IP协议的转换,可以使一个房间或者一整栋大厦的CAN总线信息转变为Internet的形式后传输出去或反过来通过这类网关把外网传来的信息转换为CAN总线的形式,即实现了远程控制[10]。
1.2.2、国内发展现状及趋势在以往的国内测控领域,由于没有更好的选择,大多采用BITBUS或RS-485作为通信总线。
其不足主要有:一主多从,无冗余;数据通信为命令响应,传输率低;错误处理能力弱,采用CAN总线技术后即可解决上述问题[11]。
CAN总线上的每一个节点都可作为主节点交换数据并且可以分出优先级。
这些特点使其在工业测控领域众多总线中成为首选的现场总线之一[13]。
基于CAN总线的田间作业机车工况监测采用高新技术提高了机车性能、可靠性和安全性等。
目前国内机车工况监控系统的研究情况主要如下:21世纪初期吉林大学任辉、杨印生等在泰国农机作业委托的调查中论述了农机作业委托的定义,郭鸿鹏开展了农机作业委托决策支持系统研究的工作。
2006年国家农业信息化工程技术研究中心李洪等人开展了基于GPS、GPRS和GIS的农机监控调度系统的研究,实现为远距离快速采集农机信息、农机资源的实时监控和有效调度提供了一种切实可行的解决方案。
2009年华南农业大学罗锡文、张智刚等设计东方红X-804机车的DGPS自动导航控制系统,针对东方红X-804机车在特定工况下,所提出的跨行地头转向控制方法对试验机车具有良好的适用性。
2010年山东理工大学李进鹏和杨自栋设计了一套8行精密播种机的监测系统,采用液晶触摸屏作为人机界面,实现了直接地显示8行播种工况的功能。
2004-2012年,浙江大学何勇等进行了基于网络的农业机械装备管理信息系统的研究,开发了农机性能综合检测仪,该仪器能够完成快速测定农机的工作状态,实现了一机多用[16]。
目前,对机车的作业研究主要集中于驱动系统、行走机构、液压悬挂、制动、导航研究等几个方面,相对于作业参数的实时监测及本机工作状态的实时检测研究较少,对于CAN总线运用到农机中的研究也是较少的。
系统将农机工况信息传输技术与装备研制,实现农机作业参数的本地及远程监控是本系统的主要研究内容。
1.3 研究的主要内容本课题的主要任务是基于CAN总线的田间作业机车工况数据监测系统的建立。
着重突出以下几方面的研究:第一章,分析了国内外的研究现状,阐述了本论文的目的和意义,并提出了本研究的主要内容第二章,详细的介绍了基于CAN总线的田间作业机车工况数据监测系统的总体框架设计,包括CAN总线的概述和协议,GPS接收器概述,各类传感器、单片机信息和GPRS 发送等。
第三章,设计硬件,包括传感器模块,GPS模块和GPRS模块,显示屏模块和CAN 控制器模块信息采集端包括GPS(Global Positioning System)接收模块、浮子传感器,温度传感器等,将这些模块按照设计顺序依次连接进行测试。
第四章,进行软件编程,软件编程部分是本论文的重点和难点。