高精度超短基线在水下定位中的应用
超短基线定位系统在侧扫声呐水下定位中的应用

G o n g y i v u 。 s n u : ● ● ■ ■ 三 ● ■ ■ ■ 至 ■ ■ ■ 主 ■ ● ■ ■ 茎 ■ ■ ● ■ ■ ● ■ ■ ● l ■ l _ -
2 超 短 基 线 定 位 系统 来自 用 中 的误 差 分 析 根 据 图 1可 以 了解 到 超 短 基 线 的 数 据 来 源 主 要 有 D G P S 、
采用直角三角形基阵 , 直 角 边 的阵 元 间 距 为 d , X 轴 指 向船 首方 向, 3 个 基 阵 的坐 标 如 图 2所 示 , 分别为 ( 0 , d, 0 ) 、 ( 0 , 0 , O ) 、
2 0 1 4 年第 3 O期总 第 4 2 0期
收 基 阵 到拖 鱼 的 相 对 方 位 角 ; 通 过 测 定 声 波 到 接 收 基 阵 的 时
由于 在 实 际 生 产 中 斜 距 r远 大 于 阵元 间 距 d, 因 此 可 推 导 出公 式 ( 8 ) 、 ( 9 ) :
一
间, 再利用声速剖面修 正波速 线 , 最 终确定 接收基 阵到拖 鱼 的
了 3根 单 相 海 底 电 缆 , 作为 南方 电 网主网与 海南 电 网的联络 线 。受 狭 管 效 应 影 响 , 琼 州海峡 常年海 流较大 , 而 海 底 电 缆 部
( o 。 0)
分海域海床为泥沙底质 , 易因海水 冲刷而使海底地形 地貌产 生
巨大变化 。同时琼州海峡是 国内最繁忙 的航道之一 , 船舶抛锚
相 对距 离 , 从 而 确 定 拖鱼 的相 对 位 置 。
水下作业专项施工方案汇总

水下作业专项施工方案汇总一、前言水下作业是一项具有挑战性和复杂性的任务,需要通过科学合理的施工方案来保障作业的安全、高效进行。
本文将针对水下作业中常见的几种专项施工方案进行汇总和分析,旨在为水下作业施工提供参考。
二、深水定位作业方案深水定位作业是水下施工中常见的场景之一,对于定位精度和稳定性要求较高。
基于目前先进的技术手段,我们提出了以下深水定位作业方案:1.浮标定位法–通过在水面设置浮标,结合GPS、声纳等定位设备,实现对水下作业区域定位。
2.超短基线(USBL)定位法–利用超短基线系统,通过水下无线信号传输定位数据,实现水下设备的准确定位。
三、水下焊接作业方案水下焊接是水下作业中的重要环节,需要克服水压、水质等影响因素。
为保证焊接作业的质量和安全,我们提出以下水下焊接作业方案:1.气体保护焊接–在水下引入保护气体,组织水下氧气对焊接质量的影响,保障焊接质量。
2.潜水员手持电弧焊接–潜水员携带手持电弧焊接设备,通过手工操作完成水下焊接作业,灵活性高,但需注意安全防护。
四、水下管道铺设作业方案水下管道铺设是水下工程中的常见施工内容,需要综合考虑地形、水流等因素。
我们提出以下水下管道铺设作业方案:1.水下挖沟法–采用潜水员使用水下挖掘机或水下吹砂机等工具,在水底挖掘沟槽,便于管道的铺设与安装。
2.水下定向钻井法–利用水下定向钻井技术,通过水下水平定向钻井,实现管道铺设的快速、高效安装。
五、结语水下作业是一项技术含量高、风险较大的工作,需要针对不同施工环境和任务要求制定相应的专项施工方案。
通过本文对水下深水定位、水下焊接和水下管道铺设三个方面的方案汇总,希望能为水下作业施工提供一些参考和帮助。
GAPS超短基线声学水下定位技术及其在海洋调查中的应用
GAPS超短基线声学水下定位技术及其在海洋调查中的应用陈维【期刊名称】《大众科技》【年(卷),期】2014(000)005【摘要】GAPS水下定位系统是法国IXSEA公司开发的一套便携式声学超短基线水下定位系统,具有安装方便,操作简单、精度高等特点。
本文分析了水下定位系统的分类和原理,并以GAPS超短基线水下定位系统为例分析了其组成,原理,工作过程及误差分析,并简单介绍了其在海洋地质调查中的应用。
%the GAPS of underwater positioning system is a portable underwater acoustic ultra-short baseline positioning system developed by IXSEA company in France. It is easy to install, simple operation, high accuracy, etc. This paper analyzes the classification and principle of underwater positioning system, and its composition, principle, working process and error analysis using the GAPS ultra-short baseline underwater positioning system as an example, introduced its application in marine geological survey.【总页数】3页(P15-17)【作者】陈维【作者单位】广州海洋地质调查局,广东广州 510760【正文语种】中文【中图分类】P228.1【相关文献】1.高精度超短基线GAPS在水下定位中的应用 [J], 韩德忠;隋海琛;赵阳;张兆富2.高精度超短基线GAPS在水下定位中的应用 [J], 韩德忠;隋海琛;赵阳;张兆富3.超短基线定位系统在侧扫声呐水下定位中的应用 [J], 陈航伟4.抗差卡尔曼滤波及其在超短基线水下定位中的应用 [J], 罗才智;杨鲲;辛明真;卫进进;张凯;阳凡林5.抗差卡尔曼滤波及其在超短基线水下定位中的应用 [J], 罗才智;杨鲲;辛明真;卫进进;张凯;阳凡林因版权原因,仅展示原文概要,查看原文内容请购买。
GYROUSBL在深海水下定位中的应用

GYROUSBL在深海水下定位中的应用摘要:声学定位系统(Acoustic Positioning System)的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。
本文以某品牌超短基线定位系统为例,就超短基线(Ultra Short BaseLine)声学定位系统的原理、应用范围等几个方面展开讨论,同时介绍了高精度超短基线工程中的实际应用,对使用过程中影响定位性能的主要因素进行了简单分析。
关键词:超短基线水下定位1概述20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基线(简称USBL)水下设备大地定位技术也获得了长足的发展。
高精度水下定位系统具有广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料,因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
1.1关于水下声学定位系统20世纪50~60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。
声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。
从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。
声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。
对大多数用户来说,可重复性精度要比绝对精度重要。
在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。
基于超短基线的侧扫声呐水下目标定位技术
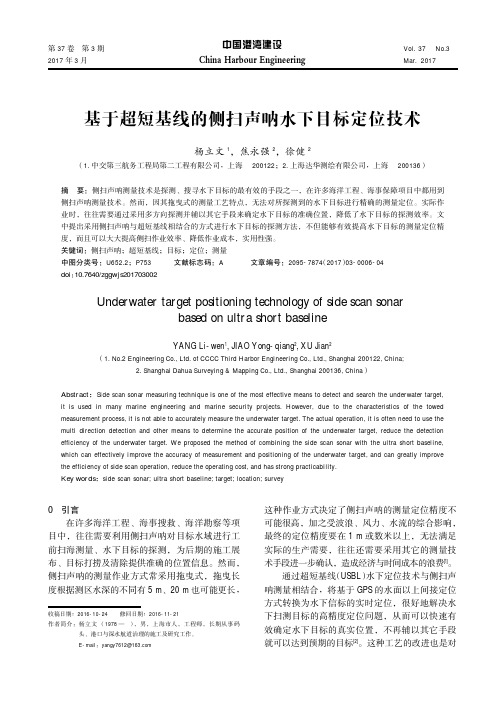
中国港湾建设China Harbour EngineeringUnderwater target positioning technology of side scan sonarbased on ultra short baselineYANG Li-wen 1,JIAO Yong-qiang 2,XU Jian 2(1.No.2Engineering Co.,Ltd.of CCCC Third Harbor Engineering Co.,Ltd.,Shanghai 200122,China;2.Shanghai Dahua Surveying &Mapping Co.,Ltd.,Shanghai 200136,China )Abstract :Side scan sonar measuring technique is one of the most effective means to detect and search the underwater target,it is used in many marine engineering and marine security projects.However,due to the characteristics of the towed measurement process,it is not able to accurately measure the underwater target.The actual operation,it is often need to use the multi direction detection and other means to determine the accurate position of the underwater target,reduce the detection efficiency of the underwater target.We proposed the method of combining the side scan sonar with the ultra short baseline,which can effectively improve the accuracy of measurement and positioning of the underwater target,and can greatly improvethe efficiency of side scan operation,reduce the operating cost,and has strong practicability.Key words :side scan sonar;ultra short baseline;target;location;survey摘要:侧扫声呐测量技术是探测、搜寻水下目标的最有效的手段之一,在许多海洋工程、海事保障项目中都用到侧扫声呐测量技术。
usbl超短基线测距原理

usbl超短基线测距原理
标题:USBL超短基线测距原理
一、引言
超短基线(Ultra Short BaseLine,简称USBL)是一种水下定位系统,广泛应用于海洋工程、水下考古、海底资源勘探等领域。
本文将详细介绍USBL的测距原理。
二、USBL测距系统组成
USBL系统主要由水面控制单元、水下声纳信标和数据处理单元三部分组成。
其中,水面控制单元包括发射器和接收器;水下声纳信标用于接收发射器发出的信号并进行反射;数据处理单元负责处理接收到的信号,并计算出目标的位置信息。
三、USBL测距原理
USBL测距原理主要是通过测量声波从发射器到目标再到接收器的时间差,从而计算出目标的距离。
具体步骤如下:
1. 水面控制单元的发射器向水下声纳信标发射声波。
2. 声波到达水下声纳信标后,被反射回来。
3. 接收器接收到反射回来的声波,并记录下接收时间。
4. 数据处理单元根据声波在水中的传播速度以及发射和接收时间,计算出目标的距离。
四、误差分析与修正
由于实际环境中存在各种因素的影响,如声速的变化、多路径效应等,可能导致测距结果出现误差。
因此,在实际应用中,通常需要对测距结果进行误差分析和修正。
五、结论
USBL超短基线测距技术以其精度高、操作简便等优点,在水下定位领域得到了广泛应用。
了解其工作原理,不仅可以帮助我们更好地使用这项技术,也有助于我们在实践中对其进行改进和优化。
六、参考文献
[待补充]。
HiPAP 100 水下定位系统及应用
HiPAP 100 水下定位系统及应用【摘要】本文概述了HiPAP100水下定位系统的组成及其工作原理,并分别就其超短基线和长基线两项功能介绍了其在海洋调查中的广泛应用,说明其在相关海洋调查中的重要性。
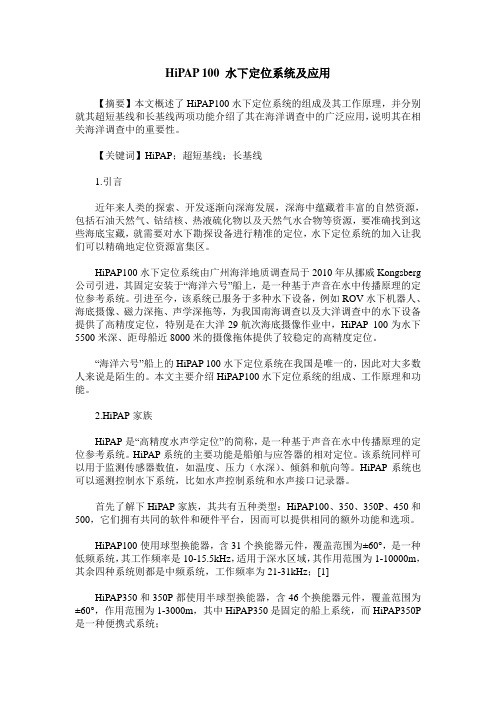
【关键词】HiPAP;超短基线;长基线1.引言近年来人类的探索、开发逐渐向深海发展,深海中蕴藏着丰富的自然资源,包括石油天然气、钴结核、热液硫化物以及天然气水合物等资源,要准确找到这些海底宝藏,就需要对水下勘探设备进行精准的定位,水下定位系统的加入让我们可以精确地定位资源富集区。
HiPAP100水下定位系统由广州海洋地质调查局于2010年从挪威Kongsberg 公司引进,其固定安装于“海洋六号”船上,是一种基于声音在水中传播原理的定位参考系统。
引进至今,该系统已服务于多种水下设备,例如ROV水下机器人、海底摄像、磁力深拖、声学深拖等,为我国南海调查以及大洋调查中的水下设备提供了高精度定位,特别是在大洋29航次海底摄像作业中,HiPAP 100为水下5500米深、距母船近8000米的摄像拖体提供了较稳定的高精度定位。
“海洋六号”船上的HiPAP 100水下定位系统在我国是唯一的,因此对大多数人来说是陌生的。
本文主要介绍HiPAP100水下定位系统的组成、工作原理和功能。
2.HiPAP家族HiPAP是“高精度水声学定位”的简称,是一种基于声音在水中传播原理的定位参考系统。
HiPAP系统的主要功能是船舶与应答器的相对定位。
该系统同样可以用于监测传感器数值,如温度、压力(水深)、倾斜和航向等。
HiPAP系统也可以遥测控制水下系统,比如水声控制系统和水声接口记录器。
首先了解下HiPAP家族,其共有五种类型:HiPAP100、350、350P、450和500,它们拥有共同的软件和硬件平台,因而可以提供相同的额外功能和选项。
HiPAP100使用球型换能器,含31个换能器元件,覆盖范围为±60°,是一种低频系统,其工作频率是10-15.5kHz,适用于深水区域,其作用范围为1-10000m,其余四种系统则都是中频系统,工作频率为21-31kHz;[1]HiPAP350和350P都使用半球型换能器,含46个换能器元件,覆盖范围为±60°,作用范围为1-3000m,其中HiPAP350是固定的船上系统,而HiPAP350P 是一种便携式系统;HiPAP450使用球型换能器,为固定的船上系统,它具有与HiPAP350系统一样的操作和技术性能,同时有着与HiPAP500一样的换能器元件,虽然只有46个元件,覆盖范围为±60°,作用范围为1-3000m,另外它可以升级为与HiPAP500一样的性能;HiPAP500使用球型换能器,含241个换能器元件,覆盖范围为±100°,作用范围为1-4000m,为固定的船上系统。
免标定便携式高精度全球超短基线水下定位系统(USBL)-GAPS-劳雷海洋
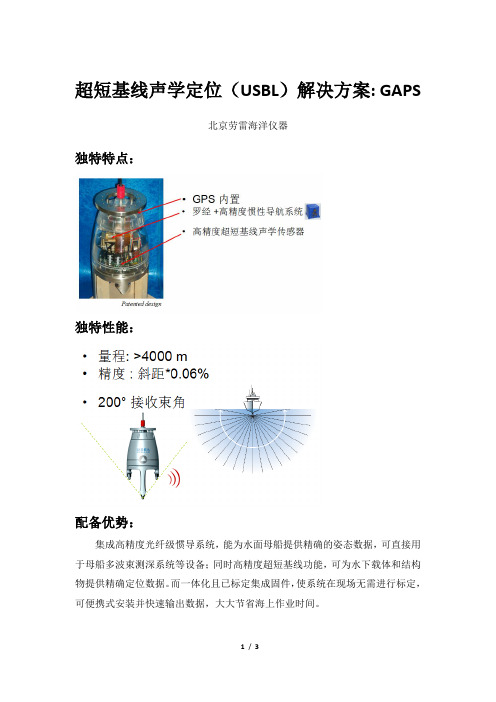
超短基线声学定位(USBL)解决方案: GAPS
北京劳雷海洋仪器
独特特点:
独特性能:
配备优势:
集成高精度光纤级惯导系统,能为水面母船提供精确的姿态数据,可直接用于母船多波束测深系统等设备;同时高精度超短基线功能,可为水下载体和结构物提供精确定位数据。
而一体化且已标定集成固件,使系统在现场无需进行标定,可便携式安装并快速输出数据,大大节省海上作业时间。
主要应用:
海上,AUV和ROV导航,水下测量和检查,钻井,动力定位(DP),结构物安装,管道和缆线布防,潜水员跟踪,地震,海洋科学,防卫系统,新能源领域
技术优势:
产品革新:集成USBL,高等级INS,实时定位和GPS技术,多用途的GAPS 能最大限度地满足海面和水下定位及导航的要求;
技术先进:采用先进信号处理技术和3D声学天线,定位精度可达0.06%斜距,适用范围覆盖10米极浅水至4000米深水
使用方便:一体化便携式结构,无须标定,可快速简便投放,节约时间和成本
主要技术指标:
水下定位
定位精度:0.06%*斜距
有效距离:4000m
覆盖范围:200º(以换能器为中心200°半球形范围内)
水面定位
艏向精度:0.01°
横摇/纵摇精度:0.01°
GAPS系统(内含惯导),为便携式系统,无需标定,重新安装即装即用!!!
水下调查及作业时,Ixblue公司GAPS等产品典型应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度超短基线定位系统在水下定位中的应用张粤宁1 刘鹏2(1.武汉长江航道救助打捞局,武汉430014;2.上海地海仪器有限公司,上海 200233)摘要:声学定位系统(Acoustic Positioning System)的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。
本文以某品牌超短基线定位系统为例,就超短基线(Ultra Short BaseLine)声学定位系统的原理、应用范围等几个方面展开讨论,同时介绍了高精度超短基线工程中的实际应用,对使用过程中影响定位性能的主要因素进行了简单分析。
关键词:超短基线水下定位1概述20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基线(简称USBL)水下设备大地定位技术也获得了长足的发展。
高精度水下定位系统具有广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料,因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
1.1关于水下声学定位系统20世纪50~60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。
声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。
从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。
声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。
对大多数用户来说,可重复性精度要比绝对精度重要。
在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。
长基线(LBL):长基线定位能在宽广的区域内提供高精度的位置,它需要至少3个应答器组成的阵列部署在海底上的已知点上,水面舰只安装一个换能器。
换能器测量出到水底应答器的斜距,从而计算出自身的坐标位置。
短基线(SBL):短基线定位需要在舰船上安装至少3个换能器阵,换能器之间的位置关系为已知,应答器安装在需要定位的目标上,舰船上的多个换能器测量出到同一个应答器的距离,从而计算出目标的位置。
超短基线(SSBL/USBL):超短基线定位的船载换能器中,有至少3个单元,应答器安装在需要定位的目标上,换能器测量出到应答器的水平和垂直角度及斜距“这三种不同方式的声学定位系统中,长基线定位(LBL)定位精度最高,但是水底布设高精度定位已知点的施工难度大且费用较高,一般使用在石油平台监测、水下考古打捞等需要高精度定位的工程。
短基线定位(SBL)需要对船体进行改造,才能放置换能器基阵,对船只的要求使短基线的应用受一定的限制。
因此,超短基线声学定位系统(SSBL)的优势是很明显的:只需要在船舶上安装一个换能器及其电子单元,就可以提供高精度的声学定位。
1.2超短基线定位的基本工作原理超短基线水下声学定位系统是根据声波在水中传播的速度往返时间测量距离和同时测量相位差的方法进行定位,即是在水下发射声波信号,依其水听器接收阵的多个单元,按等边三角形(或直角)布阵,水听器之间距离只有几厘米,将其设计装在一个部件中,按三角形所在平面,当做基准坐标系的平面,通过测量对比水听器单元接收的声波信号彼此之间的相位差确定应带其相对船艏的方位,同时测量斜距S=1/2vt,即可计算出水下应答器位置的坐标。
以HPR410P为例,在SSBL中,船载换能器向应答器发射脉冲讯问信号,应答器接收到讯问脉冲信号后,发射不同于讯问信号的应答脉冲信号。
系统内位置的计算依据测量应答器的距离和方位,解算出应答器相对于船载换能器三维空间海底位置的坐标。
超短基线定位系统一般由声学测量设备和数据采集处理设备两大部分组成。
声学测量设备由安装在船体的声学换能器和安装在水下的声学应答器组成,声学换能器发射声波信号至应答器,应答器接在收到讯问信号后,发射区别于讯问信号的响应信号回换能器,响应信号经由通讯电缆传输给数据采集处理设备,做进一步加工处理和计算,得到应答器相对于换能器的空间位置和深度。
超短基线声学定位原理2 超短基线定位的应用范围2.1为潜水员水下作业提供高精度定位信息,确保潜水员的安全。
对在建和已建长江干线航道整治工程的水下检测目前还处于起步阶段。
在以往的航道施工中,水下建筑物的施工质量检测,主要是靠施工过程中的施工管理和水下地形测量图及人工探摸来进行控制。
尤其潜水员人工探摸,危险性大、效率低,水底环境复杂,对潜水员的位置确定就非常关键。
目前国外对水下建筑物的检测多用水下机器人(ROV),ROV自身带光学的水下相机,在长江三峡库区清澈的水域可以直接进行观测提供清晰图像。
ROV还可以携带声学成像设备,针对我国江河和海洋比较浑浊的情况,ROV还可以通过携带声学成像设备,用声学的方式进行水下建筑物的检测。
2.2 为使用深拖设备,如遥控及其人、无人潜水器或自主潜水器(ROV)等进行水下建筑物检测,获取勘测的精确位置资料。
3影响定位性能的因素水下导航定位系统要实现精确导航定位,必然受到GPS导航定位系统的稳定性和可靠性、船载(集成)辅助传感器的稳定性和可靠性、超短基线导航定位系统的稳定性和可靠性、水上定位和水下定位数据融合方法等的影响和制约。
在工作应用中,应合理进行误差分配,控制显著误差,求得最佳测量成果。
水下定位的主要误差来源,包括超短基线基阵测距误差、超短基线基阵姿态测量误差、测角误差、测距交会求解造成的误差、超短基线基阵阵元相位差引起的误差、声传播引起的误差、声学噪声引起的误差、超短基线基阵和应答器安装引起的误差、校准误差、水下工作环境引起的误差、载体运动速度变化引起的误差、超短基线数据和GPS数据融合时的误差等。
但总的来说,误差来源可以综合到三个方面:校准误差、测距误差和测角误差。
3.1 校准误差船只航行时航行轨迹的瞬间变化是于气候和海况好坏有着直接关系,超短基线定位计算的瞬间起算大地坐标是通过GPS提供的,换能器安装在摇摆不定的船上,随着船只摆幅的大小变化,定位航迹于实际航迹并不完全一致。
如不考虑GPS自身定位误差的影响,依其接收天线安装高度,船只姿态对GPS和超短基线的校准的影响亦是不可忽视的因素。
3.2 测距误差测距误差主要是由测时误差引起的,而测时误差又与信噪比和声速息息相关。
声波在水下传播过程中,声速、声线弯曲、水面反射等都会影响测时准确度,而声波的扩散、吸收和环境中的噪声会影响信噪比大小,因此测距误差主要是由水声学因素引起的,水下定位时的工作条件和工作方法直接影响定位精度。
3.3测角误差测角误差主要是由阵元间相位测量误差、姿态角度误差和罗经角度误差引起。
姿态角度误差和罗经角度误差主要由安装技术引起,而相位误差与基阵和应答器的位置关系有关。
当应答器在基阵正下方时,阵元间相位差很小,从而使定位误差保持在一个较小的数值上,因此超短基线只在基阵下方一个椎度范围内定位精度较高。
4小结高精度超短基线HPR410P的便携式安装,大大减轻了工作人员野外操作和安装的繁琐性,提高了工作效率;为实现水下高精度、高要求的工程定位作业提供了可能性。
通过工程中的应用,其灵活性、方便性、高精度的特点,使其应用前景非常广阔。
The Application of Ultra Short Baseline Named HPR410P in Underwater PositioningZhang Yue-ning1, ,Liu Peng2(1. Wuhan Changjiang Waterway Rescue & Salvage Bureau, Wuhan 430014, China;2.Shanghai Geo Marine Instrement Company, Shanghai 200233,China)Abstract:The technological research of the acoustic positioning system and its application fulfills an important role in the oceanic scientific investigation and the underwater engineering in the present age. Taking a brand of the ultra-short baseline positioning system as a sample, this paper would discuss the principle of the USBL acoustic system as well as the scope of its application. In the same time, the application of this USBL of high accuracy in the engineerings is also discussed. The paper analyses also the main elements that would affect its performance of the positioning in the application.Key words:USBL, underwater positioning,。