精密数控分度转台的控制系统设计
数控机床控制系统设计

数控机床控制系统设计数控机床控制系统是现代机械加工中的重要设备,不仅减轻了人工操作的负担,还能够实现高效精确加工。
本文将从数控机床控制系统的设计原理、控制器的分类以及系统设计中需要考虑的因素等各方面进行详细阐述。
一、数控机床控制系统设计原理数控机床是一种以计算机控制的工具设备。
数控机床的工作原理是通过加工程序与自动化机床相连接,由计算机系统对机床运动进行控制。
数控机床的加工程序是一种由G代码和M 代码组成的程序,G代码主要用于控制机床的直线运动和圆弧运动、刀具半径、零点位置等,M代码则是用于控制机床的主轴转速、冷却液开关等控制信号。
基本上数控机床可以实现加工各种形状的物件,而且加工精度高,生产效率高。
二、控制器的分类数控机床控制器根据其构成和结构可以大致分为以下几个类型:1、点位控制器(P控制器):点位控制器可以控制每一个轴单独移动到预定的位置后,马上停止这一轴的运动,使其它轴继续运动。
2、直线插补控制器(L控制器):直线插补控制器是比点位控制器更为先进的控制器,它不仅在每个轴位置上进行控制,还可以控制各轴在不同的位置上同时启动或同时停止。
3、圆弧插补控制器(C控制器):圆弧插补控制器是对圆弧运动进行控制的控制器。
它可以自动地计算和控制机床在坐标平面或变位平面上的转折点、曲线半径以及运动方向等,圆心和半径的计算完全由控制器来完成。
4、模态控制器(M控制器):模态控制器是负责管理机床程序重复执行的控制器。
它只需输入一次程序,就可以重复地使用该程序。
换言之,它可以使用多个程序段,从而实现切换各种不同加工方式,同时还可以根据不同的工件要求随时更改程序的具体内容。
三、系统设计中需要考虑的因素在设计数控机床控制系统时,需要考虑如下因素:1、系统稳定性:稳定性是数控机床控制系统设计的重要指标,必须保证系统在加工过程中不会出现任何一个运动轴的失控。
系统设计时需要合理选用现代控制技术,同时要对硬件和软件进行完整测试,保证系统的稳定性。
高精度转台控制系统的研制及应用
高精度转台控制系统的研制及应用【摘要】本文提出了高精度转台控制系统的详细设计方法,试验结果验证所研制的转台控制系统运行稳定,功能完善,精度达到±0.002°,满足了相关测试需求。
【关键词】目标定位转台;定位精度;PMAC技术;冗余控制;RCS1.引言随着隐身战机的出现,飞机的隐身性能已经成为衡量战机综合性能的重要指标之一,我们通常对飞机的雷达散射截面(RCS)进行测量,来获取这一指标,用以评估飞机在未来战争中的生存能力。
室外RCS测试平台包含:测试场地、天线系统、测量系统及目标定位转台系统四个部分,其中目标定位转台在室外RCS测试平台中占有相当重要的位置,主要承担测试过程中的目标架设、转动、远程通讯及高精度目标定位等功能,为外场RCS测试、成像诊断测试提供精确的角度对应,因此,对转台的控制特性提出了较高的要求。
2.控制系统的功能、指标要求2.1 功能指标⑴实现SLEW模式、TRACK模式、SECTOR模式、DIRECT模式下转台水平旋转的控制功能;⑵具备俯仰、横滚姿态调节功能;⑶具备TTL脉冲输出功能;⑷具备IE488、RS232、以太网及光纤通讯功能。
2.2 技术指标⑴转台定位精度≤0.005°;⑵系统连续、稳定工作时间≥15小时,且性能满足指标要求;⑶系统工作的环境温度:-10℃~+60℃;保存温度:-20℃~+70℃;相对湿度:20%~95%。
3.基于PMAC技术控制系统的设计综上所述,转台控制系统的设计由以下四个方面组成:3.1 高精度控制系统的设计及研制该控制系统由PCM-4381控制计算机、ARM微处理器、C8051F040单片机、PMAC多轴运动控制卡组成,构成多层次、多处理器的复杂控制系统。
系统各计算单元之间通过CAN总线传递信息,并互相监测,实现对转台安全可靠的控制。
同时该系统主要包括以下三项功能:(1)运动轨迹规划;(2)多处理系统的管理;(3)便捷的人机操作模式。
数控冲床分度工作台的设计
摘要数控机床是采用数字控制技术对机床各移动部件相对运动进行控制的机床,它是典型的机电一体化产品,是现代制造业的关键设备。
数控回转工作台是数控铣床、数控镗床、加工中心等数控机床不可缺少的重要部件,其作用时按照控制装置的信号或指令作回转分度或连续回转进给运动,以使数控机床能完成指定的加工工序。
其外形和分度工作台十分相似,但其内部结构却具有数控进给驱动机构的许多特点。
合理设计数控分度工作台系统的结构,它是按照数控系统的指令,在需要分度时将工作台连同工件回转一定的角度。
分度时也可以采用手动分度,分度工作台一般只能回转规定的角度。
这在设计时要注意角度的计算,以使数控分度工作台工作时要回到规定的角度。
数控回转工作台是各类数控铣床和加工中心的理想配套附件。
要完成工作台系统部件的结设构设计及总图和零件图;完成小型数控冲转塔式旋转模系统的设计计算。
关键词数控机床;数控回转工作台;数控分度工作台数;控冲转塔式旋转模系统目录绪论 (3)第一章:数控回转工作台的原理与应用 (4)1.1 数控回转工作的原理 (4)1.1.1 设计准则 (5)1.1.2 主要技术参数 (5)1.1.3 本章小结 (5)数控回转工作台的结构设计 (6)1.1.4 传动方案的确定 (6)1.1.5齿轮传动的设计 (8)1.1.6 电液脉冲马达的选择及运动参数的计算 (9)1.1.7 蜗轮及蜗杆的选用与校核 (10)1.1.8 蜗杆与蜗轮的主要参数与几何尺寸 (12)1.1.9 轴的校核与计算 (13)1.2.0 弯矩组合图 (14)1.2.1 根据最大危险截面处的扭矩确定最小轴径 (14)1.2.2 齿轮上键的选择及校核 (14)1.2.3轴承的选用 (15)1.2.4本章小结 (16)第二章数控分度工作台 (17)2.1.1总体方案的设计 (17)2.1.2机械部分的设计 (18)2.1.3蜗杆蜗轮的配合 (20)2.1.4角接触球轴承的选择 (20)2.1.5控制面板的布局及按钮的功能设计 (21)2.1.6控制系统的设计 (22)2.1.7驱动电路的设计 (24)第三章旋转模系统的设计 (26)3.1 旋转模系统的结构 (26)3.1.1 旋转模工作过程 (27)3.1.2 电机选择 (28)3.2 转塔的设计 (29)3.2.1 转塔的材料和工艺 (29)3.2.2 链传动的零件和材料 (30)3.2.3滚子链传动的计算 (31)3.2.4 轴承的选择 (32)3.2.5转塔的定位 (33)3.3自转模的设计 (33)3.3.1蜗轮蜗杆的设计计算 (34)3.3.2 蜗轮蜗杆的材料及特性 (34)3.3.3蜗轮蜗杆的计算 (34)3.3.4 轴承的选择 (39)3.3.5 键的选择 (40)3.3.6 联轴器的选择 (40)总结 (43)致谢 (44)参考文献 (45)1 绪论毕业设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。
高精度数控加工设备控制系统设计与应用
高精度数控加工设备控制系统设计与应用随着科技的飞速发展和应用,数控加工设备已经成为制造业中不可或缺的一部分。
而高精度数控加工设备则是以其精度更高、生产效率更高等特点,日益受到制造业的青睐。
而这些设备则需要配备相应的控制系统才能发挥其最大作用。
本文将就高精度数控加工设备控制系统的设计与应用进行探讨。
一、高精度数控加工设备的特点高精度数控加工设备主要是依靠计算机进行控制的,它们具有很高的精度、生产效率和稳定性等特点。
其中最为突出的就是它的精度更高。
高精度数控加工设备一般可以控制到微米级别。
同时,高精度数控加工设备还具有很高的稳定性和可靠性,这就使得它们在加工过程中的误差更小,加工效率更高。
二、高精度数控加工设备控制系统的设计高精度数控加工设备控制系统的设计主要包括硬件设计和软件设计两部分。
硬件设计硬件设计主要包括控制器、电机驱动器和传感器等方面。
其中控制器是整个系统的核心设备,其主要功能是接收来自计算机的指令,并将其转换成电信号,再通过电机驱动器将电信号变成机械运动。
而电机驱动器则是用来控制电机的转速和方向。
而传感器则是用来检测机床位置和运动状态等信息的。
软件设计软件设计则是整个系统的灵魂,在整个加工过程中起到了关键作用。
软件设计主要包括三个方向:机床控制系统、NC程序编译与执行以及数据传输。
机床控制系统是整个控制系统的核心部分,控制机床的运动,完成加工的任务。
NC程序编译与执行则是将CAD绘图转化为机器代码控制数控机床完成加工过程。
数据传输则是将CAD所绘制的三维模型转换为机器代码控制数控机床完成加工过程,并将加工过程的结果输送回数控机床控制器、计算机和外设中,使其能进行处理或下一步操作。
三、高精度数控加工设备控制系统的应用高精度数控加工设备控制系统的应用非常广泛,它们可以应用在各种领域,如航空航天、医疗、电子、汽车等等。
其中最为重要的应该是航空航天领域。
由于飞机的零部件需要精度高、质量好、可靠性强、节省时间和人力等特点,所以需要高精度数控加工设备进行制造。
转台控制系统设计
电磁骚扰是指任何可能引起装置、设备或系统性能降低或者对生命或无生命物质产生损害作用的电磁现象。
它可以通过辐射和传导两种方式转播,而辐射骚扰的测试必须要考虑可重复性、经济性、准确性、抗干扰性和快速定位。
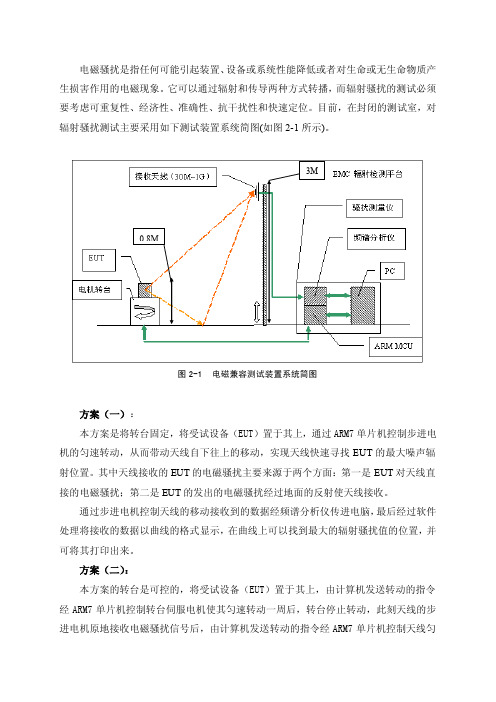
目前,在封闭的测试室,对辐射骚扰测试主要采用如下测试装置系统简图(如图2-1所示)。
3M0.8M图2-1电磁兼容测试装置系统简图方案(一):本方案是将转台固定,将受试设备(EUT)置于其上,通过ARM7单片机控制步进电机的匀速转动,从而带动天线自下往上的移动,实现天线快速寻找EUT的最大噪声辐射位置。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
方案(二):本方案的转台是可控的,将受试设备(EUT)置于其上,由计算机发送转动的指令经ARM7单片机控制转台伺服电机使其匀速转动一周后,转台停止转动,此刻天线的步进电机原地接收电磁骚扰信号后,由计算机发送转动的指令经ARM7单片机控制天线匀速向上移动,同时天线将接收到得信号经频谱分析仪处理后所得的数据,经过串口发给计算机,由计算机里测试软件以一定的算法、最快的速度处理数据,以此找到设备在该点的最大电磁骚扰值。
等天线向上移动1M后,由计算机的测试软件发出指令,使天线停止,同时让再次匀速转动一周,在转动中有天线接收EUT发出的电磁骚扰信号,后面的步骤如上所述。
当计算机读完四次数据时天线移动到最顶端。
测试完毕,由测试软件发出指令使天线回到原始位置,以便下次的测试。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
数控车床XY轴工作台和控制系统设计

数控车床XY轴工作台和控制系统设计数控车床是一种通过编程控制刀具在工件表面上进行切削操作的机床。
其中,XY轴工作台和控制系统是数控车床的核心组成部分。
在设计这些部分时,需要考虑机床的精度、稳定性、速度和可编程性等方面。
首先,设计XY轴工作台时需要考虑其机械结构和精度。
机床的工作台需要具备足够的刚性和稳定性,以确保在切削过程中不产生振动和变形。
同时,工作台的导轨和丝杆等传动装置需要具备高精度和低摩擦系数,以保证工件加工的精度和表面质量。
其次,控制系统的设计是数控车床的关键。
控制系统包括硬件和软件两个方面。
在硬件方面,需要选择适合的数控装置、电机和传感器等,以便实现高精度的位置控制。
在软件方面,需要开发编程界面和运动控制算法,以便实现工件加工的自动化和高效率。
在设计控制系统时,需要考虑以下几个关键问题。
首先是编程界面的设计,即操作人员与机床之间的交互方式。
常见的编程界面有G代码和M代码等,操作人员可以通过这些代码来描述加工过程的具体要求。
其次是运动控制算法的设计,即根据编程要求计算出各个轴的运动轨迹和速度。
在运动控制过程中,需要考虑工件表面的曲率和加工精度的要求,以便实现高品质的加工效果。
最后是运动控制的实时性要求,即在短时间内对运动轨迹和速度进行精确控制。
这对硬件设备和软件算法的性能提出了较高的要求。
总结起来,数控车床的XY轴工作台和控制系统的设计是一项复杂而关键的任务。
在设计过程中,需要考虑机床的精度、稳定性、速度和可编程性等方面。
同时,需要选择适合的数控装置、电机和传感器等硬件设备,并开发编程界面和运动控制算法等软件。
通过合理的设计和选择,可以实现数控车床的高效加工和高品质加工。
精密数控分度转台的控制系统设计

YANG J-i sen, WAN W en- lue, ZHENG Fang-yan, ZHANG T ian-heng ( Engineerin g R esearch Center ofM echan ical T esting T echnology and E qu ipmen t, M in istry of E du cation, Chongq ing Un iversity of T echnology, Chongq in g 400050, Ch ina)
后, 每个驱动器脉冲当量 为 P D = 01009b, 分度转 台的 蜗轮 与蜗 杆传动比 Z = 180, 因此, 每个驱动脉冲当量 $P 为:
$P = PD /Z = 01 000 05b( 01 2d的分度精度要求。一次分度定位所输出
的脉冲总数为
N = S /$P
存储器主要用 来保存 控制 系统的 指令 参 数, 如电 机转 速、 控制精度和分度参数等。 考虑到 微处理 器自带 I2 C 总线接 口, 选用 I2 C 总 线接 口的 EEPROM 芯片 24AA 128, 其存 储 容量 为 128 K B, 能够较好地 满足系 统的 存储要 求。微处 理器 通过 I2 C 接收与之相连。 2. 3. 3 数据接收
采用迈威科技的rs232速度分段参数表332变速控制97分段分段一分段二分段三分段四分段五分段六分段七起始频率hzf0f1f2f3f4f5f6结束频率hzf1f2f3f4f5f6f7在定时器的中断服务程序中对所输出的脉冲进行总的累tms1t2t3t4t5t6t7fhz1f2f3f4f5f6f7加计数并和各分段判断点进行比较以此来判断当前处于哪一个速度分段从而进行相应的频率控制控制方案如图4所示
数控分度工作台设计概述
数控分度工作台设计概述数控分度工作台是一种机械设备,它主要用于旋转工件,以及固定工件的位置,保证在任何时候工件的相对位置不变,从而进行加工。
在现代机械加工领域,数控分度工作台是不可或缺的设备之一,它具有精度高、能耗低、效率高等优点,在加工各种金属材料的零部件时有着广泛的应用。
在设计数控分度工作台的过程中,需要考虑以下几个方面的因素:1.机床类型与性能数控分度工作台通常是结合机床使用的,因此需要考虑机床的类型与性能对工作台的影响。
例如,机床的转速和加速度会影响到分度工作台旋转的准确度和稳定性。
因此,在设计工作台时,需要仔细考虑机床的性能参数,并确保工作台能够适应这些参数。
2.分度角度和分度精度数控分度工作台主要的功能就是实现大角度的旋转与小角度的分度旋转。
因此,在设计时需要仔细确定分度角度,并考虑如何实现分度精度,以保证加工零件的精度。
3.驱动方式数控分度工作台的驱动方式通常是由电机驱动,控制器控制。
但是,不同的驱动方式将会对加工效果产生不同的影响,因此需要仔细选择适合的驱动方式来完成加工。
4.结构与外形设计数控分度工作台的结构与外形设计需要考虑到实际加工过程中的需求。
例如,需要考虑加工件的大小、重量以及加工方式,以确保工作台能够适应各种加工需要。
在实际设计中,可能会遇到许多问题,需要经过详细的分析和研究才能得出最终的结果。
如在设计旋转平台时,需要考虑到工作台摆动时的平衡问题,此外,还需要考虑到工作台的材料和集合的环境,以保证其在使用中的稳定性和可靠性。
另外,需要考虑到工作台的维护和使用,以确保工作台能够保持良好的工作状态。
总体来说,数控分度工作台的设计需要考虑到多方面的因素,包括机床性能、分度角度、驱动方式、结构与外形等。
在设计时需要仔细研究每个方面的因素,以确保最终的设计结果能够满足加工的需求。
尤其需要注意对各个工序的应用要求的不同,以便在工作中能够根据实际需要进行调整和优化,以达到更好的加工效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仪 表 技ns r n tu nt c ni e n e o
201 0 No. 7
第 7期
精 密数 控 分度 转 台的 控 制 系统 设计
杨继森, 万文略 , 方 燕 , 郑 张天 恒
( 庆 理 工 大 学 机 械 检 测 技 术 与 装 备 教 育部 工 程 研 究 中 心 , 庆 重 重 40 5 ) 00 0
rANG i e , J— n WAN e - e, HEN F n —a ZHANG T a — e g s W nl Z u G a gy n, inh n
( nier gR sac e t f c a i l et gT c n lg n q ime t E gn ei ee rh C ne o h nc s n eh ooya dE up n , n r Me aT i
制 系统。该 系统采用步进 电机作为驱动装置 , 利用转 台中嵌入 的高精度 时栅 角位移 传感 器的角位移 测量数据 作为反馈 , 构成闭环控 制, 用分段控制 、 采 逐步逼近 的控制算 法, 达到 高速 、 高精 度分度定位的 目的 。实际应 用表 明: 该控制 系统的分
度 定 位精 度 达 到 ± ” 2。
s se w sd sg e n e e o e i h ih a v n e mb d e r c s o y t m a e in d a d d v lp d w t t e hg d a c d e e d d p o e s r h ARM. h tp moo ed v n q i me t a d T e s t ri t r i ge up n , n e sh i
te i ai oka l t id xa c rt yb r i eh n w el f o r bei sc n cl ,n e esr dut h me t gw r t e o n e c ua l y unn t a d h e o t yt l n e o ds a a di i n csa t a js t g n r b e t gh ra a e ts y O
摘要 : 融合 了时栅传 感器测量技 术的 高精度 时栅 分度 转台, 实际应 用过程 中 出现 了因定位 精度 高, 工很 难一 次性 在 人
准 确 分 度 定 位 。针 对 该 问题 , 用 高性 价 比 的 A M 嵌 入 式 处理 器 , 计 开 发 了一 套 基 于 时栅 分度 转 台 的 自动 分 度 定 位 控 利 R 设
a n e n te pr c s . th s g e tifue c n t e wo k efce c Fo o vn h r blm , ne i r tn oa y tb e nd i d x i h o e s I a r a n l n e o h r fiin y. r s li g te p o e o t me g ai g NC r tr a l
t ea g lr me s rn aa f m t e h g r cso i ai g s n o mb d e n t er tr l a s d a efe o t l n h n u a a u g d t r h i h p e iin t i o me g t e s re e d d i o ay t e w su e st e d c n r — r n h b a h oi
关键 词 : 栅 ; R 分 度 转 台 ; 入 式 ; 时 A M; 嵌 闭环 控 制
中 图分 类 号 : P9 T 33
文献标识码 : A
文 章 编 号 :02—14 ( 0 0 0 0 9 0 10 8 1 2 1 ) 7— 0 5— 4
De in fCo r lSy tm o i h Pr cso m e G r tn C t r b e sg o nt o se f r H g e ii n Ti a i g N Ro a y Ta l
f r t n t o sr c n ls d lo o to y t m. h o t la g rt m fs g n ain c n r la d s c e sv p r x main omai o c n t t e co e — p c n rl s se T e c nr lo i o u o o o h o e me tt o to n u c s ie a p o i t o o Wa s d t d x hg r cso n ih s e d i h ls d l p c n rls se Th p l ai n c no msta e i d xn r c — s u e i e ih p e i n a d h g p e t e co e — on i n o o to y t m. e a p i t o fr h t h e i gp e i c o t n
Mii r f d ct n C o g igU iesyo eh oo , h n qn 0 0 0 C ia ns yo uai , h n qn nvri T c n lg C o g ig40 5 , hn ) t E o tf y
Ab t a t h ih p e iin t r t gr t r a l a s d i h c i i g id xn . u t sg n r l i c l t s sr c :T e h g r cso i ga i o ay tb e w s u e n te ma hn n n e ig B t e e al df ut o u e me n ii y i