3自由度旋转台的动力学分析
《2024年度一种3自由度自动钻铆机构的运动学分析与优化设计》范文

《一种3自由度自动钻铆机构的运动学分析与优化设计》篇一一、引言随着现代制造业的快速发展,自动化钻铆技术已成为提高生产效率和产品质量的关键技术之一。
其中,3自由度自动钻铆机构作为实现自动化钻铆的重要设备,其运动学分析与优化设计显得尤为重要。
本文旨在针对一种3自由度自动钻铆机构的运动学特性和性能进行深入研究,以期达到提高工作效率和稳定性的目的。
二、3自由度自动钻铆机构概述3自由度自动钻铆机构主要由驱动系统、传动系统、执行机构等部分组成。
其中,驱动系统提供动力,传动系统将动力传递到执行机构,执行机构则完成钻铆作业。
该机构具有三个方向的自由度,即沿X轴、Y轴和Z轴的移动,能够实现对工件的精确定位和钻铆作业。
三、运动学分析1. 坐标系建立与转换为了研究3自由度自动钻铆机构的运动学特性,首先需要建立合适的坐标系。
本文采用笛卡尔坐标系,将工件和机构分别固定在两个坐标系中。
通过坐标系之间的转换关系,可以分析机构的运动轨迹和姿态。
2. 运动学方程建立根据机构的运动原理和坐标系转换关系,建立机构的运动学方程。
该方程能够描述机构在三维空间中的运动状态,包括位置、速度和加速度等参数。
通过对该方程的分析,可以了解机构的运动特性和性能。
四、优化设计1. 设计参数优化为了提高3自由度自动钻铆机构的工作效率和稳定性,需要对机构的参数进行优化设计。
主要包括驱动系统的功率、传动系统的传动比、执行机构的运动轨迹等参数的优化。
通过仿真分析和实验验证,确定最优的参数组合。
2. 结构优化除了参数优化外,还需要对机构的结构进行优化设计。
通过对机构的结构进行改进和优化,可以提高机构的刚度和精度,减少振动和误差。
同时,还需要考虑机构的轻量化和紧凑性,以满足现代制造业对设备的要求。
五、实验验证与结果分析为了验证优化设计的有效性,本文进行了实验验证。
通过对比优化前后的机构性能指标,如工作效率、稳定性、精度等,验证了优化设计的有效性。
实验结果表明,经过优化设计的3自由度自动钻铆机构具有更高的工作效率和稳定性,能够满足现代制造业的要求。
3自由度并联机器人的运动学与动力学分析_刘善增

第 45 卷第 8 期 2009 年 8 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 5 N o . 8 Aug. 2009
DOI:10.3901/JME.2009.08.011
3 自由度并联机器人的运动学与动力学分析*
刘善增 1, 2 余跃庆 1 佀国宁 1 杨建新 1 苏丽颖 1
(1. 北京工业大学机械工程与应用电子技术学院 北京 100124; 2. 中国矿业大学机电学院 徐州 221116)
1 3-RRS 并联机器人的运动学分析
一种空间 3 自由度并联机器人的结构简图,如 图 1 所示。它由一个动平台 P1P2P3,三条支链 BiCiPi(i=1, 2, 3)和一个静平台(基座)B1B2B3 组成。其 中,动平台通过球面副(S 副)与各支链连接,静平台 通过转动副(R 副)与各支链连接,且 Bi 处转动副的 轴线与 Ci(i=1, 2, 3)处转动副的轴线对应平行。分别 建立与动平台固结的局部(动)坐标系 Pxyz 和系统 (固定)坐标系 OXYZ,如图 1 所示,坐标系的原点 P 和 O 分别位于动平台和静平台的几何中心,轴 z 和 Z 分别垂直于动、静平台向上,轴 x、y 与 X、Y 分 别平行和垂直于上、下平台的边 P2P3 与 B2B3。局部 定坐标系 Bixiyizi (i=1, 2, 3)的 xi 轴与 Bi 处转动副轴线 一致,zi 垂直于静平台 B1B2B3 向上,yi 轴同时垂直 于 xi 和 zi 轴。
三自由度稳定平台运动学分析
LOGO
三自由度并联自稳定平台的 机构设计与运动学分析
汇报人: 汇报人:
( X bi , Ybi , Zbi ,1)
旋转矩阵 Rop 为
cα sγ Rop = s s α γ cβ cγ + cα sβ c y − cα sβ c y 0
T
= Rop ( xbi , ybi , zbi ,1)
T
(1-1)
e ix β = − x b i c γ s β + y b i s γ s β + z b i c β e ix γ = − x b i s γ c β + y b i c γ c β
e iy α = − x b i s γ s α − x b i c γ s β s α − y b i c γ s α − y b i s γ s β c α − z b i c β c α e iy β = − x b i c γ c β c α − y b i s γ c β s α + z b i s β s α e iy γ = − x b i c γ c α − x b i s γ c β s α − y b i s γ s α − y b i c γ s β c α − z b i c β c α
Company Logo
ai , Yai (pX−aixyz , Z ai )
自稳定平台的工作空间
三自由度摇摆台方案设计及仿真分析
第19卷 第12期 中 国 水 运 Vol.19 No.12 2019年 12月 China Water Transport December 2019收稿日期:2019-07-23作者简介:时阳阳(1993-),男,上海理工大学硕士生。
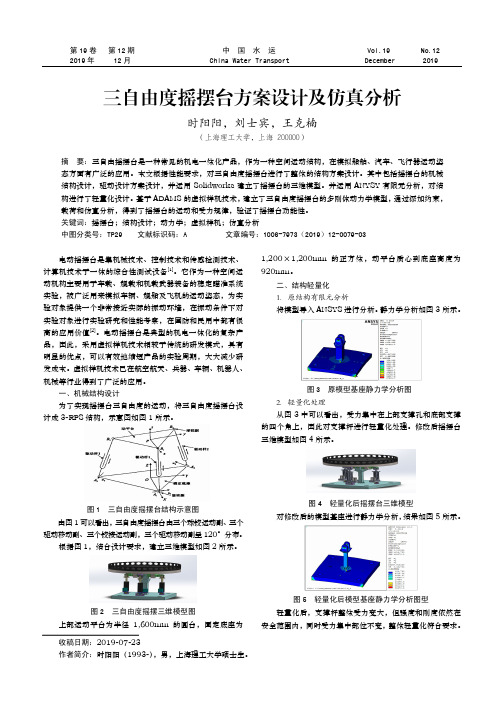
三自由度摇摆台方案设计及仿真分析时阳阳,刘士宾,王克楠(上海理工大学,上海 200000)摘 要:三自由摇摆台是一种常见的机电一体化产品,作为一种空间运动结构,在模拟船舶、汽车、飞行器运动姿态方面有广泛的应用。
本文根据性能要求,对三自由度摇摆台进行了整体的结构方案设计。
其中包括摇摆台的机械结构设计,驱动设计方案设计,并运用Solidworks 建立了摇摆台的三维模型。
并运用ANYSY 有限元分析,对结构进行了轻量化设计。
基于ADAMS 的虚拟样机技术,建立了三自由度摇摆台的多刚体动力学模型,通过添加约束,载荷和仿真分析,得到了摇摆台的运动和受力规律,验证了摇摆台功能性。
关键词:摇摆台;结构设计;动力学;虚拟样机;仿真分析中图分类号:TP29 文献标识码:A 文章编号:1006-7973(2019)12-0079-03电动摇摆台是集机械技术、控制技术和传感检测技术、计算机技术于一体的综合性测试设备[1]。
它作为一种空间运动机构主要用于车载、舰载和机载武器装备的稳定瞄准系统实验,被广泛用来模拟车辆、舰船及飞机的运动姿态,为实验对象提供一个非常接近实际的振动环境,在振动条件下对实验对象进行实验研究和性能考察,在国防和民用中都有很高的应用价值[2]。
电动摇摆台是典型的机电一体化的复杂产品,因此,采用虚拟样机技术相较于传统的研发模式,具有明显的优点,可以有效地缩短产品的实验周期,大大减少研发成本。
虚拟样机技术已在航空航天、兵器、车辆、机器人、机械等行业得到了广泛的应用。
一、机械结构设计为了实现摇摆台三自由度的运动,将三自由度摇摆台设计成3-RPS 结构,示意图如图1所示。
三自由度工业机器人动力学分析
(18)
【下转第65页】 第40卷 第9期 2018-09 【53】
将式(11)代入式(10)中可得:
(12)
当Te>TL时,
dω dt
>
0 ,系统加速;
图3 机器人动力学控制原理图
当Te<TL时, dω < 0 ,系统减速; dt
当Te=TL时,系统以恒速运动,即稳态运动,在稳 态时,电动机的电磁转矩大小由电动机的负载转矩所 决定。
在实际的系统中,在电机与负载之间往往有减速 器,如图4所示。
图4 多轴传动系统图
在计算过程当中,我们通常将负载转矩折算到电机
转矩上。
首先,按照能量守恒,折算到电机轴上的负载功率
应等于工作机械的负载工率加上减速器中的损耗,即:
TL′ωM
= TLωL η
(13)
两种运动负载折算到电机轴上的转矩为:
(14)
式中,η<<1为1 传动效率,i
=
ωM ωL
为减速器减速比。
按照能量守恒:
1 2
J ωM2
=
1 2
J M ωM2
+
1 2
J LωL2
(15)
等效的转动惯量和飞轮矩分别为:
J
=
JM
+
JL
(ωM / ωL )2
=
JM
+
JL i2
(16)
GD2
=
GDM2
+
GDL2 i2
(17)
4 机器人动力学模型
机器人的动力学模型就是将机器人的本体模型与 雅可比矩阵和电机模型相结合,即由式(3)、式(9)、式 (12)、式(17)可得:
三自由度螺栓拆卸机械手的设计及动力学分析_孙恒辉
E - ma i:l
sunhenghu@i
第 1期
孙恒辉 等: 三自由度螺栓拆卸机械手的设计及动力学分析
# 17#
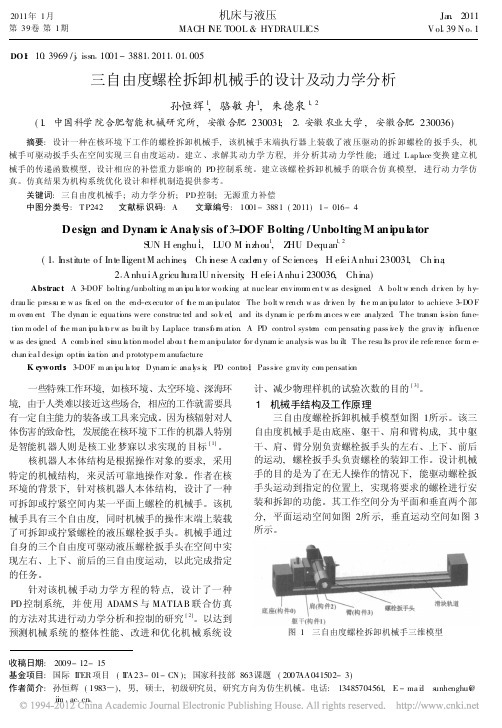
工作原理可以描述为: 通过传感器和相应的检测 办法检测到需要操作螺栓的位置后, 机械手的躯干部 分负责驱动液压扳手沿底座上导轨方向运动到左右的
指定位置, 肩部分负责驱动液压扳手沿与导轨竖直的 方向运动到上下的指定位置, 臂部分负责驱动液压扳 手沿与导轨的水平 垂直方向 运动到 前后的 指定 位置, 通过这三部分的运 动来实现 扳手运 动到指 定的 位置, 拆卸指定的螺栓。 2 机械手运动学分析 211 坐标系定义与位置求解
M 2 = m2 + m3;
M 3 = m3;
l2 = m2 + m3;
l1 = l3 = 0。 为了对该机械手进行动力学分析和控制系统的设
计, 需要根据其 动力学 方程, 通 过 Lap lace变换 建立 机械手的传递函数模型。在实际的仿真分析中, 通过
控制律补偿重力的影响, 因此将重力项略去。该机械
三自由度螺栓拆卸机械手模型如图 1所示。该三 自由度机械手是由底座、躯干、肩和臂构成, 其中躯 干、肩、臂分别负责螺栓扳手头的左右、上下、前后 的运动, 螺栓扳手头负责螺栓的装卸工作。设计机械 手的目的是为了在无人操作的情况下, 能驱动螺栓扳 手头运动到指定的位置上, 实现将要求的螺栓进行安 装和拆卸的功能。其工作空间分为平面和垂直两个部 分, 平面运动空间如图 2所 示, 垂直运动 空间如 图 3 所示。
关键词: 三自由度机械手 ; 动力学 分析; PD 控制; 无源重力补偿 中图分类号: T P242 文献标 识码: A 文章编号: 1001- 3881 ( 2011) 1- 016- 4
并联三自由度运动平台动力学分析

式中: Fz (t ) 为三个电动缸在 a,b,c 三点对动平台作 用力在质心的合力; M1(t ) 为绕 x 轴的转矩; M 2 (t) 为
绕 y 轴的转矩。由此角加速度 和 也就得到了。 根据并联三自由度运动平台系统的机械结构以及技
术指标要求: 三根电动缸总体承受载荷 W=1000kg。
2 动力学分析 由于运动平台的高度非线性和时变性,以及多体系 统的约束条件等都给计算带来巨大困难。利用广义坐标, 对动力学普遍方程进行变换,可以得到与自由度数目相 同的一组独立运动微分方程,从而使方程更简洁,便于 计算。设机构系统广义坐标 qi(t)(i=1,2,3),即为三自由度 运动仿真模拟平台的动平台质心位置的垂直位移 z 和整
基金项目:辽宁省教育厅科研项目(201114126)
1 运动平台自由度的计算 并联三自由度运动平台,其结构简图如图 1 所示。 该机构上下平台支点连接起来后是两个全等的等边三角 形 abc 和 ABC,三条边的长度均为 600mm, 上、下平台 之间用 3 根可伸缩的量程为 400mm 的电动缸相联,即
Dynamic Analysis of a 3-DOF Parallel Platform
FU Jing-shun1,LANG Xiao-hui1,ZHANG Hong2 (1.Shenyang University of Technology,Shenyang 110870; 2.Shenyang Equipment Manufacturing School, Shenyang 110026)
动 平 台 可 以 由 a,b,c 三 点 空 间 坐 标
,
和
完全确定,由于三角形 abc
为等边三角形,且三边长度不变,即 Lab=Lbc=Lca,可列 出三个约束方程:
3自由度并联机床的运动学和动力学研究(翻译)

3自由度并联机床的运动学和动力学研究摘要:中国东北大学已经研制出一种用于钢坯研磨的新型3自由度并联机床。
它具有结构简单,刚度大的优点,更高的力量重量比,较大的工作空间,简单的运动学方程,没有运动的奇异位姿。
在使用相应刀具情况下该机器人可用于磨削,研磨,抛光等加工过程。
在本文中,介绍了简单的机器人的结构和自由度,运动学和工作空间,精度分析,静态和动态的分析及其相关参数。
关键词:并联机床;运动学;动力学;3自由度1.前言与传统机床相比,并联机床具有更高的精度,高刚度的优点,和更高的刚度质量比,所以近些年它得到了行业和机构大量的研究和评估。
由美国Giddings & Lewis公司研制的“六足虫”并联机床被认为是21世纪机床领域中的革命性理念。
然而这个Stewart平台存在运动耦合的缺点,并且具有复杂的运动学和构件要求十分严格。
这类少于六自由度并联机床在行业和机构也因此受到越来越多的关注。
意大利Comau研制出了一种命名为Tricept的四条腿的的三自由度并联机床。
东北大学已经开发出了一种新型三自由度的三腿平行磨削机床(图1)。
与“六足虫”并联机床相比,此三腿平行磨削并联机床具有以下优点:(1)结构简单且具有更大工作空间;(2)动力学方程简单便于控制操作;(3)在工作空间没有运动耦合状态。
图12.并联机床2.1 3自由度系统的布局该三自由度并联机构由一个移动平台,基础平台,一个平行的联动和三条腿的连接两个平台。
中间腿支链控制的移动平台的三个自由,如图2所示。
移动平台的转换是由平行连杆机构控制。
图22.2 运动学和工作空间移动平台平行于基础平台,一个坐标系统(O- X,Y,Z)选择如图2所示,这种机制的逆向运动学正解方程可以表示为:123l l l ===其中w=a-b,2m = ,n=w/2 ,a 和分别表示基础平台的两侧的长度和等边三角形状的移动平台的长度。
该机构的位置正解方程可表示为:2222222132X l l w Y w Z =-+==从公式1和2可知系统在整个工作空间无奇异位姿和运动耦合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3自由度旋转台的动力学分析高征1肖金壮1王洪瑞1金振林21. 河北大学,保定,0710022. 燕山大学,秦皇岛,066004摘要:对3自由度旋转台进行了动力学分析。
该旋转台只有3个方向的转动自由度, 由2自由度球面并联机构和串联在其上的旋转电机构成。
根据旋转台的几何和运动特性建立了系统的输入输出速度方程, 得出了速度雅克比矩阵和动能方程。
利用拉格朗日法和虚功原理, 建立了系统的动力学模型, 解决了特定外载荷和速度、加速度条件下如何求解驱动力矩的问题。
给出了动力学的仿真运算实例, 讨论了在匀速和匀加速情况下, 2自由度球面并联机构驱动力矩的变化。
最后根据动力学方程, 得出了串联在2自由度球面并联机构上的第三个自由度的力矩与输出转角的运动学方程。
关键词:并联机构;旋转台;动力学;拉格朗日法;虚功原理中图分类号:TP242Dynamic Analysis on A 3-DOF Rotational PlatformGao Zheng1Xiao Jinzhuang1Wang Hongrui1Jin Zhenlin21. Hebei University, Baoding, 0710022. Yanshan University, QinHuangdao, 066004 Abstract: Dynamics is analyzed of a 3-DOF (degree of freedom) rotational platform. This rotational platform, which consists of a 2-DOF spherical parallel mechanism and a rotational degree connecting in series to the platform of the 2-DOF mechanism, has only 3 rotation freedoms. System’s input-and-output velocity functions are established according to rotational platform’s geometry and motion characteristics, and then obtain the velocity Jacobian metrics and energy functions. System’s dynamics model is established by Lagrange method and virtual work principle, and then the drive torque is solved when given the external load, velocities and accelerations. The examples are given of dynamics simulation. The drive torques’ changing curves of the 2-DOF spherical mechanism is discussed under the situation of uniform speed and acceleration. Finally, according to the dynamic functions, the third degree’s kinematics equation is obtained respecting to its torque and output angle.Key words: parallel mechanism; rotation platform; dynamics; Lagrange method; virtual work principle0 前言稳定平台系统是多学科有机结合的产物,其中精密机械动力学建模设计和仿真就是主要的应用技术之一[1]。
机构动力学模型的建立是并联机器人机构研究的一个重要方面,是并联机器人机构进行动力学模拟、动态分析、动力学优化设计及控制的基础[2]。
典型的动力学研究方法主要是Newton-Euler法、Lagrange法和Kane法等。
其中基于虚功原理的Lagrange 法是以系统的动能和势能建立的,推导过程比较简便,并且总能得到形式较为简洁的动力学方程,既能用于系统动力学模拟,又能用于动力学控制,而且清楚地表示出各构件的耦合特性[3]。
Liu[4]等人将机器人的位姿视为广义坐标,以Lagrange方程为依据建立Stewart平台的动力学方程; 白志富[5]等利用Lagrange 法讨论了一种3-HSS并联机构在工作空间内的动力学方程,得出了其显式解,并结合实例对各滑块的驱动力进行了计算机仿真。
刘善增,余跃庆[6]等基于有限元理论、运动弹性动力分析方法和Lagrange 方程,建立了3- RRS 柔性并联基金项目:教育厅河北省高等学校科学技术研究青年基金项目(2010217),科技部国际合作项目(2008DFR10530)机器人的支链动力学模型,通过系统的运动协调关系将各支链组装在一起,得到系统的弹性动力学方程。
陈纯,黄玉美等[7]采用Lagrange 方法建立了VC80 混联机床两自由度并联机构封闭形式的逆动力学模型。
在2自由度球面并联机构的运动平台上串联了一个电机(转动副)构成3自由度旋转台,可应用于具有稳定和跟踪功能的稳定平台。
采用基于虚功原理的Lagrange 法建立了该旋转台的动力学模型,并利用Maple 软件给出了计算机仿真结果。
1 机构说明3-DOF(Degree of Freedom ,自由度)旋转台,如图1所示机构简图,由2-DOF 球面并联机构和串联在其上的转动副构成。
2-DOF 球面并联机构为空间5杆机构,运动副均为转动副,所有轴线皆汇交于一点O ,其中电机1和电机2固定在机架上,为主动副,两电机轴互相垂直。
2-DOF 机构运动平台只能做围绕球心O 的转动。
电机3固连在2-DOF 机构的运动平台上,电机3的轴线垂直于该运动平台。
支架1和支架2分别对应 90的圆心角,支架3对应 180的圆心角。
如图1所示,定坐标系XYZ O -的原点位于2-DOF 球面并联机构的旋转中心O ,X 轴沿电机1的轴线方向,Y 轴沿电机2的轴线,Z 轴由右手螺旋法则确定;动坐标系xyz O -'的原点与定坐标系的原点重合,固接于2-DOF 机构运动平台中心即球面机构的旋转中心O 。
电机1轴与支架1直接相连,输入角为α,电机2轴与支架3直接相连,输入角为β,电机3轴与工作台直接相连,输入转角为γ;3-DOF 旋转台的输出转角为x θ,y θ,z θ。
x yz )(O'O1支架12x θy θαγ X Y21A 2A 1B 1C 1D 2B 2C 支架13图1 3-DOF 旋转台机构简图 图2 3-DOF 旋转台原型图2所示为金振林等设计制造的3-DOF 旋转台原型。
图中,电机1和电机2通过平行四边形1111D C B A 和2322D C B A 分别与支架1和支架3相连。
引入平行四边形结构可改变电机的安装位置,改善机构整体的紧凑性。
电机3安装在电机3支架内(图2中看不到),而电机3支架对应于图1中2-DOF 机构运动平台。
2 输入输出速度方程由文献[8]中的分析可知2-DOF 球面机构的角位移输入输出关系为)cos cos sin arctan(βααθ=x (1)βθ=y (2)而3-DOF 中绕Z 轴转动的自由度由电机3独立控制,所以γθ=z (3)式(1)左右两边对时间求导,得βααββαααβθ222cos cos sin sin cos sin cos +⋅+⋅= x (4) 式(2)左右两边对时间求导,得βθ =y(5) 式(3)左右两边对时间求导,得γθ =z (6)由式(4)(5)可得2-DOF 球面并联机构的速度Jacobian 矩阵为⎪⎪⎪⎭⎫ ⎝⎛++=10cos cos sin sin cos sin cos cos sin cos 2222221βααβααβααβJ (7) 式(4)~(6)即为系统的输入输出速度方程,整理得速度Jacobian 矩阵⎪⎪⎪⎪⎪⎭⎫ ⎝⎛++=1000100cos cos sin sin cos sin cos cos sin cos 222222βααβααβααβJ (8) 3 动能方程机构的总动能T 由1T ,2T ,3T 构成,即321T T T T ++= (9)其中1T 为工作台、电机3和电机3支架,即2-DOF 球面并联机构运动平台的动能,2T 为连杆i i B A 、i i C B 、i i D C (2,1=i )以及支架1和支架3的动能,3T 为工作台绕z 轴转动的动能。
ωI ω0T 121ch T = (10) 式中()T y x θθ =ω为输出速度矢量,0ch I 为平台相对于过质心的坐标系的惯量矩阵, 用输入速度矢量代替输出速度矢量,整理后得()()()()T10T 1T 012121βαβαθθθθ J I J I ch y x ch y x T == (11) 工作台、电机3和电机3支架可看作一个整体,则其惯性张量为⎪⎪⎭⎫ ⎝⎛=yy yx xy xx ch I I I I 0I (12) 动能2T 为2223122121222123212221222211232122212)21()21()(21)(212122122121212212βαβαββααββαα r m I I r m I I r m r m I I I I v m v m I I I I T +++++=+++⋅++⋅=+++⋅++⋅= (13)1I 为连杆i i B A 的转动惯量,2I 为支架1和支架2的转动惯量,3I 为支架3的转动惯量,i m 为两个平行四边形长边连杆i i C B (2,1=i )的质量,1v ,2v 为两个平行四边形长边连杆的速度,r 为电机转轴到平行四边形长边连杆转轴中心的长度。
动能3T 为22233212121γθω w z w w I I I T === (14) w I 为工作台的转动惯量,是已知量。
4 3-DOF 旋转台的广义力分析由于机构含有3个转动自由度,可以用3个电机的主动输入为广义坐标k q (3,2,1=k )来描述机构的运动。
为了求得广义坐标k q 下的广义力k Q ,先设某一个广义坐标k q 不为零,其它2个广义坐标为零,根据虚功原理有k k k k q M W q Q ∆+∆∙='=∆∑θM δ (15)式中k j i M z y x M M M ++=为机构所受的外力矩;k j i θz y x θθθ∆+∆+∆=∆为末端的虚角位移;k M 为电机k 的驱动力矩。