基于BP神经网络PID整定原理和算法步骤
基于BP神经网络的PID控制系统设计
基于BP神经网络的PID控制系统设计一、引言PID(Proportional-Integral-Derivative)控制器是一种常用的自动控制器,其通过测量系统的输出偏差,根据比例、积分和微分三个因素来控制系统的输出。
然而,传统的PID控制器难以适应复杂、非线性和时变的系统,对于这类系统的控制,神经网络已经被证明是一种有效的方法。
本文将介绍基于BP神经网络的PID控制系统设计。
二、BP神经网络简介BP神经网络(Backpropagation Neural Network)是一种常用的前向反馈型人工神经网络,其通过反向传播算法来训练网络参数,从而实现对输入数据的学习和预测。
BP神经网络拥有多层神经元,每个神经元都与下一层神经元相连,并通过权重和阈值来传递和处理输入信息。
三、PID控制器简介PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成,其控制输出的公式为:u(t) = Kp * e(t) + Ki * ∑e(t)dt + Kd * de(t)/dt其中,u(t)为控制器的输出,Kp、Ki、Kd为控制器的三个参数,e(t)为系统的输出偏差,∑e(t)dt为偏差的积分项,de(t)/dt为偏差的微分项。
1.数据采集和预处理:首先需要采集系统的输入和输出数据,并对其进行预处理,包括数据归一化和滤波处理等。
2.神经网络设计和训练:根据系统的输入和输出数据,设计BP神经网络的结构,并使用反向传播算法来训练网络参数。
在训练过程中,根据系统的输出偏差来调整比例、积分和微分三个参数。
3.PID控制器实现:根据训练得到的神经网络参数,实现PID控制器的功能。
在每个控制周期内,根据系统的输出偏差来计算PID控制器的输出,将其作为控制信号发送给被控制系统。
4.参数调优和性能评估:根据控制系统的实际情况,对PID控制器的参数进行调优,以提高系统的控制性能。
基于BP神经网络的PID控制器设计
基于BP神经网络的PID控制器设计PID控制器是一种常用的控制器,可以通过根据系统的误差、历史误差和误差的变化率来计算控制信号,从而实现对系统的控制。
传统的PID控制器可以通过调节PID参数来实现对系统动态特性的控制,但是参数调节过程往往需要经验和反复试验,而且很难实现对非线性系统的精确控制。
近年来,基于BP神经网络的PID控制器设计方法得到了广泛的关注。
BP神经网络是一种常用的人工神经网络模型,可以通过训练得到输入与输出之间的映射关系。
在PID控制器设计中,可以将误差、历史误差和误差的变化率作为BP神经网络的输入,将控制信号作为输出,通过训练神经网络来实现对控制信号的合理生成。
1.数据预处理:首先需要采集系统的输入输出数据,包括系统的误差、历史误差和误差的变化率以及相应的控制信号。
对这些数据进行归一化处理,以便神经网络能够更好地学习和训练。
2.网络结构设计:根据系统的特性和要求,设计BP神经网络的输入层、隐藏层和输出层的神经元数量。
通常情况下,隐藏层的神经元数量可以根据经验设置为输入层和输出层神经元数量的平均值。
3.训练网络:采用反向传播算法对神经网络进行训练,以获得输入和输出之间的映射关系。
在训练过程中,需要设置学习率和动量系数,并且根据训练误差的变化情况来确定训练的终止条件。
4.参数调整:将训练得到的神经网络与PID控制器相结合,根据神经网络的输出和系统的误差、历史误差和误差的变化率来计算控制信号,并通过对PID参数的调整来实现对系统的控制。
1.适应能力强:BP神经网络能够通过训练来学习系统的动态特性,从而实现对非线性系统的精确控制。
2.自适应性高:BP神经网络能够根据实时的系统状态来实时调整控制信号,从而实现对系统动态特性的自适应控制。
3.参数调节方便:通过BP神经网络的训练过程,可以直接得到系统的输入和输出之间的映射关系,从而减少了传统PID控制器中参数调节的工作量。
4.系统稳定性好:基于BP神经网络的PID控制器能够根据系统状态及时调整控制信号,从而提高了系统的稳定性和鲁棒性。
BP神经网络PID控制
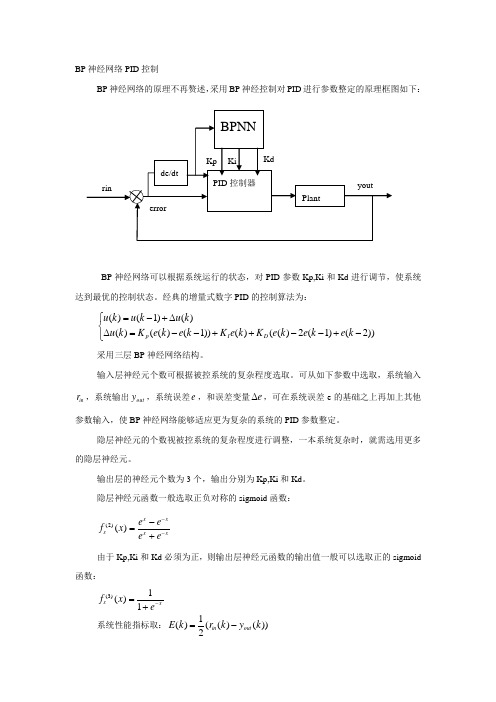
BP 神经网络PID 控制BP 神经网络的原理不再赘述,采用BP 神经控制对PID 进行参数整定的原理框图如下:BP 神经网络可以根据系统运行的状态,对PID 参数Kp,Ki 和Kd 进行调节,使系统达到最优的控制状态。
经典的增量式数字PID 的控制算法为:()(1)()()(()(1))()(()2(1)(2))p I D u k u k u k u k K e k e k K e k K e k e k e k =-+∆⎧⎨∆=--++--+-⎩采用三层BP 神经网络结构。
输入层神经元个数可根据被控系统的复杂程度选取。
可从如下参数中选取,系统输入in r ,系统输出out y ,系统误差e ,和误差变量e ∆,可在系统误差e 的基础之上再加上其他参数输入,使BP 神经网络能够适应更为复杂的系统的PID 参数整定。
隐层神经元的个数视被控系统的复杂程度进行调整,一本系统复杂时,就需选用更多的隐层神经元。
输出层的神经元个数为3个,输出分别为Kp,Ki 和Kd 。
隐层神经元函数一般选取正负对称的sigmoid 函数:(2)()x xsx xe e fx e e ---=+由于Kp,Ki 和Kd 必须为正,则输出层神经元函数的输出值一般可以选取正的sigmoid 函数:(3)1()1s xf x e -=+系统性能指标取:1()(()())2in out E k r k y k =-采用梯度下降法对BP 神经网络的参数进行调整:设输入层的个数为N ,输出向量为(1)O ,隐层个数为H ,输入阵为(2)W ,为H ×N 维向量,输出层的个数为3,输入阵设为(3)W 。
令(1)(1)(1)(1)12[,,,]TN OO O O =设隐层的输入向量为(2)(1)hi W O =,hi 为列向量,第j 个隐层神经元的输入:(2)(1)1Nj ji ii hi w O ==∑,(1,2,j H =)第j 个神经元的输出为(2)()j s j ho f hi =; 输出层的输入(3)(3)I W ho =,输出为(3)(3)(3)()[,,]T s p I D Of I K K K ==按照梯度下降法修正网络权系数,按E(k)的负方向调整系统,并且加一个是搜索加快的收敛全局极小的惯性量:(3)(3)(3)()()(1)oj oj ojE k W k W k W ηα∂∆=-+∆-∂,其中η为学习速率,α为平滑因子; (3)(3)(3)(3)(3)(3)()()()()()()()()()()()oo oj o o oj O k I k E k E k y k u k W y k u k O k I k W k ∂∂∂∂∂∂∆=∂∂∂∆∂∂∂(1,2,3o =,1,2,j H =)其中(3)oj W 为(3)W 的第o 行和第j 列。
基于BP神经网络PID整定原理和算法步骤_精品
基于BP神经网络PID整定原理和算法步骤_精品1.收集实验数据:首先需要收集系统的输入和输出数据,包括输入变量(如温度、压力等)和输出变量(如阀门开度、电机转速等)。
同时,需要记录系统的环境条件,如温度、湿度等。
2.数据预处理:对收集到的数据进行预处理,包括数据清洗、去除异常值等。
确保数据质量的同时,也要注意保持数据的连续性和完整性。
3.构建神经网络:使用BP神经网络构建PID整定模型。
BP神经网络是一种具有前馈和反馈连接的多层感知器,可以用于解决非线性问题。
根据PID控制器的输入和输出关系,设计网络的输入层、隐含层和输出层。
4. 网络训练:使用收集到的实验数据对神经网络进行训练。
训练的目标是使网络的输出尽可能接近实际输出,从而建立输入和输出之间的映射关系。
可以使用误差反向传播算法(Backpropagation)来调整网络的权重和阈值。
5.网络评估:训练完成后,使用预留的一部分数据对网络进行评估。
通过比较网络的输出和实际输出,可以评估网络的准确性和稳定性。
如果评估结果不满意,可以进行网络调整和再训练。
6. PID参数计算:根据已经训练好的神经网络,可以使用PID整定算法计算PID参数值。
常用的PID整定算法包括Ziegler-Nichols方法、Chien-Hrones-Reswick方法等。
根据系统的响应特性和性能指标,选择合适的算法进行参数计算。
7.参数调整和优化:根据实际应用需求,对计算得到的PID参数进行调整和优化。
可以通过仿真和实验验证的方式,不断调整参数,直到满足系统的性能要求。
8.实际应用:将优化后的PID参数应用到实际控制系统中。
根据系统的特点和要求,可以进一步进行参数调整和优化。
同时,需要不断监测和评估系统的性能,并及时调整和优化PID参数。
综上所述,基于BP神经网络的PID整定原理和算法步骤主要包括数据收集、数据预处理、神经网络构建、网络训练、网络评估、PID参数计算、参数调整和优化以及实际应用等步骤。
基于BP神经网络的PID控制系统设计
基于BP神经网络的PID控制系统设计一、引言PID控制系统是目前工业控制中广泛应用的一种基本控制方法,它通过测量控制系统的偏差来调节系统的输出,以实现对控制对象的稳定控制。
然而,传统的PID控制器需要事先对系统建模,并进行参数调整,工作效果受到控制对象模型的准确性和外部干扰的影响。
而BP神经网络具有非线性映射、自适应性强、鲁棒性好等优点,可以有效地克服传统PID控制器的缺点。
因此,基于BP神经网络的PID控制系统设计成为当前研究的热点之一二、基于BP神经网络的PID控制系统设计理论1.PID控制器设计原理PID控制器是由比例环节(Proportional)、积分环节(Integral)和微分环节(Derivative)组成的控制器,其输出信号可以表示为:u(t) = Kp*e(t) + Ki*∫e(t)dt + Kd*(de(t)/dt),其中e(t)为控制系统的输入偏差,t为时间,Kp、Ki和Kd分别为比例系数、积分系数和微分系数。
2.BP神经网络理论BP神经网络是一种前馈型神经网络,通过反向传播算法对输入信号进行学习和训练,从而得到最优的网络结构和参数。
BP神经网络由输入层、隐层和输出层组成,其中每个神经元与上、下相邻层之间的神经元互相连接,并具有非线性的激活函数。
3.基于BP神经网络的PID控制系统设计理论基于BP神经网络的PID控制系统设计的核心思想是将BP神经网络作为PID控制器的自适应调节器,根据控制对象的输入信号和输出信号之间的误差进行训练和学习,通过调整BP神经网络的权重和阈值来实现PID 控制器的参数调节,从而提高控制系统的稳定性和鲁棒性。
三、基于BP神经网络的PID控制系统设计步骤1.系统建模首先,需要对待控制对象进行建模,获取其数学模型。
对于一些复杂的非线性系统,可以采用黑箱建模的方法,利用系统的输入和输出数据进行数据拟合,获取系统的数学模型。
2.BP神经网络训练将系统的数学模型作为BP神经网络的训练集,通过反向传播算法对BP神经网络进行训练,得到最优的网络结构和参数。
(完整word版)基于BP神经网络的自整定PID控制仿真
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
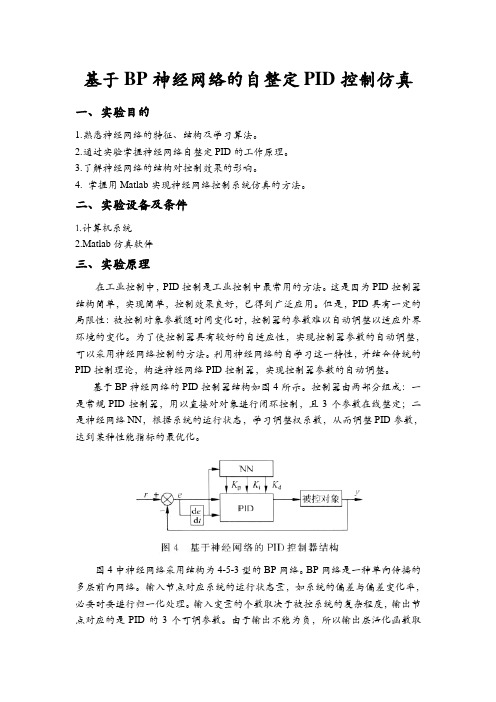
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
基于BP神经网络PID整定原理和算法步骤
基于BP神经网络PID整定原理和算法步骤BP神经网络是一种常用的非线性拟合和模式识别方法,可以在一定程度上应用于PID整定中,提高调节器的自适应性。
下面将详细介绍基于BP神经网络的PID整定原理和算法步骤。
一、基本原理:BP神经网络是一种具有反馈连接的前向人工神经网络,通过训练样本的输入和输出数据,通过调整神经元之间的连接权重来模拟输入和输出之间的映射关系。
在PID整定中,可以将PID控制器的参数作为网络的输入,将控制效果指标作为网络的输出,通过训练网络来获取最优的PID参数。
二、算法步骤:1.确定训练数据集:选择一组适当的PID参数和相应的控制效果指标作为训练数据集,包括输入和输出数据。
2.构建BP神经网络模型:确定输入层、隐藏层和输出层的神经元数量,并随机初始化神经元之间的连接权重。
3.设置训练参数:设置学习速率、误差收敛条件和训练迭代次数等训练参数。
4.前向传播计算输出:将训练数据集的输入作为网络的输入,通过前向传播计算得到网络的输出。
5.反向传播更新权重:根据输出与期望输出之间的误差,利用误差反向传播算法来调整网络的连接权重,使误差逐渐减小。
6.判断是否达到收敛条件:判断网络的训练误差是否满足收敛条件,如果满足则跳转到第8步,否则继续迭代。
7.更新训练参数:根据训练误差的变化情况,动态调整学习速率等训练参数。
8.输出最优PID参数:将BP神经网络训练得到的最优权重作为PID 控制器的参数。
9.测试PID控制器:将最优PID参数应用于实际控制系统中,观察控制效果并进行评估。
10.调整PID参数:根据实际控制效果,对PID参数进行微调,以进一步优化控制性能。
三、应用注意事项:1.训练数据集的选择应尽量全面、充分,覆盖各种不同工况和负载情况。
2.隐藏层神经元数量的选择应根据实际情况进行合理调整,避免过拟合或欠拟合现象。
3.学习速率和训练迭代次数的设置应根据系统复杂度和训练误差的变化情况进行调整。
基于BP神经网络的PID控制器的研究与实现
第十六届电工理论学术研讨会论文集基于BP神经网络的PID控制器的研究与实现张建国.(漳州职业技术学院电于工程系福建漳州363000)摘要:本文介绍基于BP神经网络的PID控制器的实现方法,可以在一定程度上解决传统PID调节器不易在线实时整定参数、难于对一些复杂过程和参数幔时变系统进行有效控制等问题。
一r一关键词:PID控制;神经网络;研究O引言PID控制要取得好的控制效果,必须寻找比例、积分和微分三种控制作用在形成控制量中相互配合又相互制约的关系,这种关系不一定是简单的“线性组合”,要在变化无穷的非线性组合中找出最佳的关系并非易事。
为此,本文试图利用神经网络所具有的:①能够充分逼近任意复杂的非线性关系,从而形成非线性动力学系统,以表示某种被控对象的模型或控制器模型;②能够学习和适应不确定性系统的动态特性;⑨所有定量或定性的信息都分布储存于网络内的各神经单元,从而具有很强的容错性和鲁棒性;④采用信息的分布式并行处理,可以进行快速大量运算等特点,把神经网络引入传统的PID控制,可以在一定程度上解决传统PID调节器不易在线实时整定参数、难于对一些复杂过程和参数慢时变系统进行有效控制等问题。
1基于BP神经网络的PID控制器BP神经网络具有逼近任意非线性函数的能力,而且结构和学习算法简单明确。
通过神经网络自身的学习,可以找到某一最优控制律下的P、I、D参数。
基于BP神经网络的PID控制系统结构如图1所示。
控制器由两个部分组成:①经典的PID控制器:直接对被控对象过程闭环控制,并且三个参数KP、KI、KD为在线整定式;②神经网络NN:根据系统的运行状态,调节PID控制器的参数,以期达到某种性能指标的最优化。
即使输出层神经元的输出状态对应于PID控制器的三个可调参数KP、KI、KD,通过神经网络的自身学习,加权系数调接,从而使其稳定状态对应于最优控制律下的PID控制器参数。
经典增量式数字PID的控制算式为u(k)=-u(k-1)+KP[e(k)-e(k-1)】+kIc(k)+kDEe(k)-2e(k-1.)+e(k.2)】(1)式中KP、KI、Kd一比例、积分、微分系数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
90年代初,对神经网络的发展产生了很大的影响是诺贝尔奖获得者Edelamn提出Darwinism模型。他建立了一种神经网络系统理论,例如,Darwinism的结构包括Dawin网络和Nallance网络,并且这两个网络是并行的,而他们又包含了不同功能的一些子网络。他采用了Hebb权值修正规则,当一定的运动刺激模式作用后,系统通过进化,学会扫描跟踪目标。Narendra和Parthasarathy(1990年)提出了一种推广的动态神经网络系及其连接权的学习算法,它可表示非线性特性,增强了鲁棒性。神经网络理论有较强的数学性质和生物学特性,尤是神经科学、心理学和认识科学等方面提出一些重大问题,是向神经网络理论研究的新挑战,因而也是它发展的最好的机会。
This article takes the BP neural network as the research object. The content of the research mainly contain: firstly, it introduces the concept of neural network, control structure and mode of study and so on. Secondly, it introduces the artificial neuron model, the basic principles of BP neural network and the derivation process in detail. Then, it applies BP neural network in the PID, and introduces the tuning principles of PID based the BP neural network and steps of the algorithm. Finally,Matlab/Simulink is used to simulate the BP neural network PID control system. In the consequence, the performance of BP neutral networkcontrol significantly good. BPneural network control system has a strong self-tuning, adaptive function.
摘要
神经网络作为一门新兴的信息处理科学,是对人脑若干基本特性的抽象和模拟。它是以人的大脑工作模式为基础,研究自适应及非程序的信息处理方法。这种工作机制的特点表现为通过网络中大量神经元的作用来体现自身的处理功能,从模拟人脑的结构和单个神经元功能出发,达到模拟人脑处理信息的目的。
目前,在国民经济和国防科技现代化建设中神经网络具有广阔的应用领域和发展前景,其应用领域主要表现在信息领域、自动化领域、工程领域和经济领域等。
1.2
当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。在实际生产过程中,由于受到参数整定方法繁杂的困扰,因此常规PID控制的应用受到很大的限制和挑战。人们对PID应用的同时,也对其进行各种改进,主要体现在两个方面:一是对常规PID本身结构的改进,即变结构PID控制。如积分分离算法,抗积分饱和算法和微分项的改进等等。另一方面,与模糊控制、神经网络控制和专家控制相结合,扬长避短,发挥各自的优势,形成所谓智能PID控制。
虽然人工神经网络存在着以上的许多优点及广泛的应用,但同时也存在着一些不足,由于神经网络的不足阻碍了神经网络的发展,在现实应用中BP神经网络是最为广泛的神经网络模型,BP神经网络是在1986年被提出的,因其系统地解决了多层网络中隐含单元连接权的学习问题,它同样具有人工神经网络所具有的特点。本课题是以BP神经网络模型研究为主。BP神经网络的缺点主要表现在以下几个方面:
神经网络是一个由大量简单的处理单元广泛连接组成的系统,用来模拟人脑神经系统的结构和功能。它从开始研究到发展并不是一帆风顺的,经历了兴起到低潮,再转入新的高潮的曲折发展道路。20世纪80年代中期以来,在美国、日本等一些西方工业发达国家里,掀起了一股竞相研究、开发神经网络的热潮。近十多年来人工神经网络的发展也表明了,这是一项有着广泛的应用前景的新型学科,它的发展对目前和未来科学技术水平的提高将有重要影响。
KEY WORDS:BP algorithm,PID control,self-tuning
第1章 绪论
1.1
在计算机技术没有发展的条件下,大量需求的控制对象是一些较为简单的单输入单输出线性系统,而且对这些对象的自动控制要求是保持输出变量为要求的恒值,消除或减少输出变量与给定值之误差、误差速度等。而PID控制的结构,正是适合于这种对象的控制要求。因此PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛应用于过程控制中,尤其适用于可建立精确数学模型的确定性控制系统。然而实际工业生产过程往往具有非线性,时变不确定性,难以建立精确地数学模型,应用常规PID控制器不能达到理想的控制效果,而且在实际生产现场中,由于受到参数整定方法繁杂的困扰,常规PID控制器往往整定不良,性能欠佳,对运行工况的适应性很差。所以人们从工业生产过程需要出发,基于常规PID控制器的基本原理,对其进行了各种各样的改进,形成所谓智能PID控制[1]。而其中神经网络所具有的大规模的并行处理和分布式的信息存储;极强的自学、联想额容错能力;良好的自适应和自组织性;多输入、多输出的非线性系统都基本符合工程的要求。人工神经网络作为生物控制论的一个成果,其触角几乎延伸到各个工程领域,并且在这些领域中形成新的生长点。
以神经网络研究为开端,整个学术界对计算的概念和作用有了新的认识和提高。计算不仅仅局限于数学中,更不仅采取逻辑的、离散的形式,在大量的物理现象以至生物学对象中,进行各种各样的计算,而且大量的运算表现在对模糊低精度模拟量的并行计算,对于这一类计算,传统的计算机是无能为力的。神经网络的数学理论本质是非线性的数学理论,因此,现代非线性科学方面的进展必将推动神经网络的研究,同时,神经网络理论也会对非线性科学提出新课题。神经网络研究的对象是神经系统,这是高度进化的复杂系统,也是系统科学中一个重要的具体的领域。神经网络的研究不仅重视系统的动态特性,而且强调事件和信息在系统内部的表达和产生。
Nowadays, the neural network has wide application fields and prospects in the national economy and modernization of national defense science.It mainly applies in information, automation, economical and so on.
神经网络应用时不需考虑过程或现象的内在机理,一些高度非线性和高度复杂的问题能较好地得到处理,因此神经网络在控制领域取得了较大的发展,特别在模型辨识、控制器设计、优化操作、故障分析与诊断等领域迅速得到应用。神经网络控制作为二十一世纪的自动化控制技术,国内外理论与实践均充分证明,其在工业复杂过程控制方面大有用武之地。而工业现场需要先进的控制方法,迫切需要工程化实用化的神经网络控制方法,所以研究神经网络在控制中的应用,对提高我国的自动化水平和企业的经济效益具有重大意义[2]。神经网络具有很强的非线性逼近能力和自学习能力,所以将BP神经网络算法与PID控制相结合产生的间接自校正控制策略,能自动整定控制器的参数,使系统在较好的性能下运行。
本文以BP神经网络作为研究对象。研究的内容主要有:首先介绍了神经网络的概念、控制结构,学习方式等。其次,介绍了人工神经元模型,并对BP神经网络的基本原理及推导过程进行详细阐述。再次将BP神经网络的算法应用于PID中,介绍了基于BP神经网络PID整定原理和算法步骤。最后利用MATLAB/Simulink对BP神经网络PID控制系统进行仿真,得出BP神经网络的控制效果明显好,它具有很强的自整定,自适应功能。
(1)学习过程收敛速度慢,训练易陷入瘫痪;
(2)训练过程中易陷入局部极小值;
(3)网络泛化能力差;
(4)隐节点数及权重和阈值初始值的选取缺乏理论指导:
(5)未考虑样本选择对系统的影响;
(6)未考虑传递函数对神经网络系统的影响;
另外,网络结构的确定:包括隐含层数及各隐含层节点数的确定:以及学习率的选取等问题的存在严重阻碍了BP神经网络的发展,致使其理论发展缓慢。同时也因为BP网络的这些缺点限制了其应用领域的拓宽及应用程度的深入,不利于国民经济的健康发展。因此,研究BP神经网络显然具有重要理论意义和重要的应用价值。