基于仿生学的扑翼机设计与仿真
仿生扑翼结构优化设计及动力学仿真分析
仿生扑翼结构优化设计及动力学仿真分析
徐涛;丁长涛
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)1
【摘要】针对目前飞行器结构复杂、效率低下及动作单一等问题,设计一种新型仿生扑翼飞行机构,仅通过单驱动装置即可实现机构扑翼的扑动、折叠、扭转等运动。
依据生物尺度率设计扑翼机构的结构尺寸并对机构参数进行优化;通过SolidWorks 构建仿生三维模型并基于ANSYS Workbench对扑翼机构进行有限元分析,得到扑翼齿轮组、曲柄、主翼杆等主要部件的总形变、应力、等效应变及主、副翼动力学运动参数,为仿生样机研制提供理论支持。
【总页数】5页(P128-132)
【作者】徐涛;丁长涛
【作者单位】浙江工业职业技术学院机电工程学院
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.仿生扑翼机构设计及仿真分析
2.仿生扑翼机构设计及仿真分析
3.两段式仿生扑翼机构设计及仿真分析
4.仿生扑翼飞行器扑翼驱动机构的设计探讨
5.仿生扑翼齿轮
组设计及动力学分析
因版权原因,仅展示原文概要,查看原文内容请购买。
两段式仿生扑翼机构设计及仿真分析
tion angle of two rockers were analyzed. The dynamics model of flapping⁃wing aircraft was established by using SolidWorks and ADAMS
software. The motion parameters of internal and external wings and the overall position and attitude changes of the aircraft were ana⁃
和飞行器整体的位姿变化。 结果表明: 在相同杆长条件下, 曲柄中存在夹角的机构在减少左右摇杆相位差角方面更具优
势; 两段式仿生扑翼机构可实现翅翼慢频率扑动和展向折弯。 仿真结果验证了机构设计的合理性, 为扑翼飞行器后续的研
究提供参考。
关键词: 单曲柄双摇杆机构; 同步性; 相位角差; 两段式仿生扑翼机构
2020 年 1 月
机床与液压
MACHINE TOOL & HYDRAULICS
第 48 卷 第 2 期
Jan 2020
Vol 48 issn 1001-3881 2020 02 032
本文引用格式: 李京虎,付国强,武斌.两段式仿生扑翼机构设计及仿真分析[ J] .机床与液压,2020,48(2) :144-148.
器, 德国 FESTO 公司设计了翅膀能主动折弯的 Smart⁃
bird
[5-6]
; 南京航空航天大学昂海松团队研制了主动
双曲柄双摇杆机构、 平面单曲柄双摇杆机构等 [8-9] 。
这些机构主要有对称模式和不对称模式两种, 对称模
式下两侧摇杆运动时没有相位角差, 不对称模式下则
基于连杆齿轮机构的仿生扑翼飞行器设计
基于连杆齿轮机构的仿生扑翼飞行器设计仿生扑翼飞行器是一种根据仿生学知识进行设计的飞行器,其体积小、重量轻、运动方式灵活多变、隐蔽性好,在军事领域和民用领域具有广泛的潜在应用。
基于四连杆机构中的曲柄摇杆机构进行扑翼飞行器扑翼机构的设计,并计算其自由度;基于齿轮系机构进行扑翼飞行器传动机构的设计并计算其自由度;然后将扑翼机构与传动机构结合,使得一个电机即可驱动两侧扑翼上下扇动,实现扑翼功能,所设计的仿生扑翼飞行器结构简单、易于实现。
标签:连杆机构;齿轮机构;仿生扑翼doi:10.19311/ki.16723198.2017.01.0951引言早在地球上出现人类之前,各种生物已在大自然中生活了亿万年,他们通过自然选择进化而具有的能力很多都值得人类去学习。
仿生是高科技的代名词,它是运用尖端科学技术产品来模仿生物的各种官能感觉和思维判断功能,更加有效地为人服务。
各国都在不遗余力地加大在仿生学方面的研究。
莱特兄弟于1903年造出世界上第一架飞机后,如今的固定翼飞行器在飞行速度和运载能力上都取得了很大的突破。
然而这种固定翼飞行器在起飞和降落时均需要很长的滑行距离,人们还是希望能设计一种真正像自然界鸟儿那样通过上下挥动翅膀飞行的飞行器,我们称这类飞行器为扑翼飞行器。
扑翼飞行器具有无需跑道可垂直起落,并且可以用很小的能量进行长距离飞行,具有较强的机动性等优点。
扑翼飞行器已经广泛的运用在了民用及国防等各个领域。
2研究概要本研究通过模仿自然界的鸟上下挥动翅膀的动作,进行仿生扑翼飞行器的设计。
仿生扑翼飞行器主要分为仿生扑翼机构和电机传动机构两部分。
仿生扑翼机构基于四连杆机构中的曲柄摇杆机构,电机传动机构基于齿轮机构,最终实现扑翼飞行器在空中飞行的功能。
(1)仿生扑翼飞行器:扑翼飞行是鸟类靠自身体力和特殊生理构造实现的一种较复杂的动力飞行。
扑翼飞行器的结构仿生,是模仿鸟类的形态、结构和控制原理,从而设计制造出的功能更集中、效率更高并具有生物特征的机械。
DIY橡筋动力扑翼机
DIY橡筋动力扑翼机
这款飞机模型是利用仿生原理设计的、模仿鸟飞行时翅膀的运动特点设计的,模拟真实飞行。
室内室外均可开展趣味性游戏。
在制作和调试时,一定要尽量让双翼保持节奏一致。
材料外包装
各种制作零部件及说明书
不同颜色的机翼满足孩子们的不同喜好。
看,多像一只展翅飞翔的大鸟!
仔细看看下面,原来是以橡筋为动力的哦!
将橡筋上足劲后松手,等扑翼机的翅膀上下扑动平稳后放开,扑翼机就能够飞起来啦!
调整机翼的配重和尾翼的上扬角度,就可以调整飞机的飞行状态。
我们是为了拍照需要才在屋里放飞的哦。
如果您也要在屋里放飞,注意不要把橡筋上劲过多,否则你的飞机很容易撞坏哦!
【橡筋动力伞翼机】
空模:E012 发布日期: 2010-5-24 6:37:57 人气:124
伞翼结构,机翼展翅更大,采用较新颖的飞行方式。
最长滞空时间可达1分半。
“飞北”指定器材。
翼展:470mm 机长:410mm
材料外包装
各种制作零部件及说明书
看,完成啦!
哇,飞起来啦!。
扑翼飞行机器人的设计与飞行力测试研究

扑翼飞行机器人的设计与飞行力测试研究近年来,随着科技的不断发展,扑翼飞行机器人作为一种新型的飞行器,受到了越来越多的关注。
与传统的固定翼飞行器相比,扑翼飞行机器人模仿了自然界中鸟类和昆虫的飞行方式,具备更好的机动性和适应性。
本文将重点介绍扑翼飞行机器人的设计原理和飞行力测试研究。
首先,扑翼飞行机器人的设计原理主要受到了生物学的启发。
通过研究鸟类和昆虫的翅膀运动方式,科研人员发现,它们的翅膀在飞行过程中不仅向下挥动,还会向前拉伸和向上翘起。
基于这一发现,扑翼飞行机器人的设计者们开发出了一种能够模拟这种翅膀运动的机械结构,使得机器人能够更加灵活地飞行。
其次,针对扑翼飞行机器人的飞行力测试,科研人员们也进行了大量的研究。
他们首先通过数值仿真的方法,模拟了机器人在不同飞行速度下的气动特性。
然后,利用风洞实验对仿真结果进行了验证。
这些实验结果表明,扑翼飞行机器人的翅膀运动能够产生足够的升力和推力,使得机器人能够稳定地飞行。
此外,科研人员们还对扑翼飞行机器人的控制系统进行了研究。
他们发现,通过调节翅膀的挥动频率、挥动角度和挥动幅度等参数,可以实现机器人的姿态调整和飞行轨迹控制。
这些控制参数的优化研究,为扑翼飞行机器人的飞行性能提供了重要的理论基础。
总之,扑翼飞行机器人的设计与飞行力测试研究在科学界取得了不少进展。
通过仿生学原理的应用,科研人员们设计出了能够模仿鸟类和昆虫飞行方式的机械结构。
通过数值仿真和风洞实验,他们验证了扑翼飞行机器人的飞行能力。
此外,控制系统的研究也为机器人的飞行性能提供了可靠的支持。
相信在未来的日子里,扑翼飞行机器人将会迎来更加广阔的发展前景,为人类带来更多的惊喜和便利。
扑翼机结构设计及运动仿真
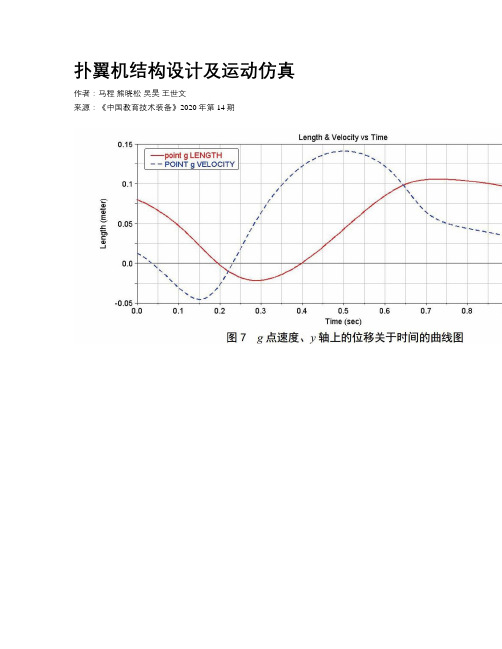
扑翼机结构设计及运动仿真作者:马程熊晓松吴昊王世文来源:《中国教育技术装备》2020年第14期摘要撲翼飞行器可以通过对鸟类或昆虫飞行动作的模仿实现飞行。
设计从生物学的视角出发,对鸟类在飞行过程中翅膀的动作进行分解总结。
阐述仿生扑翼飞行器所需要实现的基础要求,设计出一种合理可靠的二段折翼式仿生扑翼飞行器驱动机构。
使用Pro/E对设计出的驱动机构进行三维实体建模,通过运动仿真功能对驱动机构进行验证。
结果表明,设计的驱动机构符合设计要求,具有可行性。
设计为仿生扑翼飞行器的设计研制以及实体样机制造提供了理论依据。
关键词仿生扑翼飞行器;驱动机构;建模;仿真;Pro/E中图分类号:G642.0 文献标识码:B文章编号:1671-489X(2020)14-0027-03Structure Design and Motion Simulation Analysis of Bionic Flapping-wing Aircraft//MA Cheng, XIONG Xiaosong, WU Hao, WANG ShiwenAbstract Bionic flapping-wing aircraft is a flying tool that can beimitating the flight movements of flying organisms such as birds orinsects. From the perspective of biology, the structural characteristicsof bird wings were analyzed in detail, and the movement of wingsduring flight was decomposed and summarized. Based on several basic requirements for it, a reasonable and reliable driving mecha-nism of two-stage folding-wing bionic flapping-wing aircraft was designed. By using the 3D design software Pro/E, the 3D solid modelof the designed drive mechanism was built and feasible. It has been provided some theoretical basis for the design and manufacture of mechanism.Key words desks bionic flapping-wing aircraft; driving mechanism; modeling; simulation; Pro/E 1 前言仿生扑翼飞行器的研究一直是飞行器领域的热点,各种样式的仿生扑翼飞行器能够模仿自然界中各种鸟类或昆虫在空中飞行的动作,完成人们设置好的各种任务。
《小型扑翼飞行器的结构设计及仿真分析》

《小型扑翼飞行器的结构设计及仿真分析》一、引言随着科技的不断发展,扑翼飞行器因其高效、灵活的飞行特点,在军事侦察、环境监测、生物仿生学等领域中受到了广泛的关注。
本文旨在探讨小型扑翼飞行器的结构设计及其仿真分析,为扑翼飞行器的设计与研发提供理论依据。
二、小型扑翼飞行器的结构设计(一)基本框架设计小型扑翼飞行器的结构主要由以下几个部分组成:框架、动力系统、驱动系统、飞行控制系统和扑翼机构。
其中,框架是整个飞行器的基础,负责支撑和固定其他部件。
(二)扑翼机构设计扑翼机构是扑翼飞行器的核心部分,其设计直接影响到飞行器的飞行性能。
扑翼机构主要包括翼片、连杆、驱动装置等。
翼片的设计要考虑到空气动力学特性,以提高飞行器的升力和稳定性。
连杆和驱动装置的设计要保证翼片的运动轨迹和速度,以实现高效的能量转换。
(三)动力系统与驱动系统设计动力系统通常采用电动或燃油发动机,为飞行器提供动力。
驱动系统则负责控制扑翼机构的运动,通常采用舵机或电机等。
在设计中,要考虑到动力系统的功率、重量、体积等因素,以及驱动系统的控制精度和可靠性。
(四)飞行控制系统设计飞行控制系统是扑翼飞行器的重要组成部分,负责控制飞行器的姿态和轨迹。
通常采用微处理器和传感器等设备实现控制。
在设计中,要考虑到控制系统的稳定性、响应速度和抗干扰能力等因素。
三、仿真分析(一)仿真模型的建立利用计算机仿真软件,建立小型扑翼飞行器的三维模型。
模型要尽可能地反映真实情况,包括各部件的尺寸、重量、材料等参数。
(二)仿真实验过程在仿真软件中,对模型进行动力学分析和运动学分析。
通过改变模型的参数,如翼片形状、连杆长度、驱动速度等,观察飞行器的飞行性能变化。
同时,还可以通过仿真实验分析飞行控制系统的控制效果和稳定性。
(三)仿真结果分析根据仿真实验的结果,分析各参数对飞行器性能的影响。
通过对比不同设计方案的仿真结果,选择最优的设计方案。
同时,还要对飞行控制系统的控制效果和稳定性进行分析,以提高飞行器的整体性能。
仿生扑翼机器人的机械系统设计研究
仿生扑翼机器人的机械系统设计研究近年来,仿生机器人技术迅猛发展,其潜在的应用领域不断扩大。
其中,仿生扑翼机器人作为一种模拟昆虫翅膀运动的机器人,具有较高的机动性和适应性,在无人侦查、救援和农业等领域有着广阔的前景。
本文将着重研究仿生扑翼机器人的机械系统设计。
首先,机械系统设计是仿生扑翼机器人实现扑翼运动的关键。
为了模拟昆虫翅膀的运动特点,机械系统应具备轻量化、高刚度和高可靠性的特点。
一种常见的设计方法是采用柔性材料制作翅膀,如碳纤维复合材料,以实现翅膀的轻量化和高刚度。
同时,采用特殊的结构设计,如曲线状的翅膀弯曲轴,可以使机械系统具备较好的可靠性和机动性。
其次,机械系统设计还需考虑扑翼机构与驱动系统的协同工作。
在仿生扑翼机器人中,扑翼机构通常采用类似昆虫的并联结构,通过多个关节和连杆实现翅膀的运动。
为了实现高效的扑翼运动,机械系统设计需要考虑关节的精确控制和连杆的合理长度。
同时,驱动系统需要提供足够的力和速度,以实现扑翼机构的正常工作。
电机、液压或气动系统都可以作为驱动系统的选择,不同的驱动方式会对机械系统的设计提出不同的要求。
最后,机械系统设计还需考虑机器人的稳定性和控制性能。
由于仿生扑翼机器人在空气中运动,存在空气动力学效应的影响,机械系统设计需要考虑机器人的稳定性。
通过调整翅膀的形状和尺寸,以及控制翅膀的运动轨迹,可以提高机器人的稳定性。
此外,机械系统设计还需要与控制系统紧密结合,通过传感器和反馈控制实现对机器人的精确控制。
综上所述,仿生扑翼机器人的机械系统设计是实现扑翼运动的关键。
通过采用轻量化、高刚度和高可靠性的材料,设计合理的扑翼机构和驱动系统,以及考虑机器人的稳定性和控制性能,可以实现高效、稳定的扑翼运动。
随着技术的不断发展,仿生扑翼机器人的机械系统设计将进一步提升,为各个领域的应用带来更多可能性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于仿生学的扑翼机设计与仿真
苏扬、邵冠豪、史佳针、李根、李凯兴
(中国民航大学航空工程学院,天津,300300)
摘要:仿生扑翼飞行器是一种模仿昆虫或鸟类扑翼飞行的新型飞行器。
由于具有重量轻、体积小、隐身性、可操作性好和成本低等特点,在国防和民用领域均有十分广泛的应用前景。
本文主要介绍了基于仿生学研制的某小型扑翼无人飞行器,并对其设计思想和制作工艺进行详细阐述与说明。
关键词: 仿生学扑翼机无人侦察制作工艺
0 前言
论文详细介绍了一款基于仿生学研制的小型扑翼无人飞行器。
该扑翼飞行器可以作为无人侦察机使用,整机重20g,采用四翅扑翼机构,翼展为280mm,整机全长仅190mm。
该机采用轻木为材料来制作机身,KT板来制作尾翼。
不但价格低廉,加工方便,而且还能很大程度上保持较轻的重量和足够的强度。
扑翼传动机构采用3D打印技术进行制作,材料为PLA塑料。
整机外形尺寸是以家燕为仿生对象来进行设计的,整机的外形尺寸参数如表1所示。
表 1 扑翼无人飞行器试验机结构参数(单位mm)
名称机身长度机身宽度机身最高处翼展机翼弦长机翼厚度垂尾高度
参数190 40 35 280 85 0.015 55
1 扑翼飞行器的设计与建模
扑翼机构采用四翅机构是由于四翅机构可以利用Wei-Fogh效应而产生较高的升力[2],这会对之后添加工作负载产生很大的帮助。
机身结构外形尺寸参数是根据尺度效应[3]来确定的,在最大限度地减重和模仿家燕的同时,还留有一定的可调裕度以适应不同重量的负载。
尾翼结构采用应用较为成熟的常规式尾翼。
控制方面采用电磁舵机+微型接收机来作为控制舵面的方式。
整机三维建模如图1所示。
图1 整机的三维建模图2 重心位置示意图
2扑翼飞行器的分析与调整
我们对所设计的扑翼飞行器分别进行了重心、气动、振动、扑动稳定性四个方面的分析,分析结果如下:
重心分析:在三维建模软件中完成整机的三维建模之后,再对各个部件按照实际情况进行材料的定义,定义完材料之后进行质量统计,得出该扑翼飞行器的整机质量约为12g,重心位置如图2所示,可见其重心在空气动力弦与对称面的交点附近,便于机身的稳定。
气动分析:由于机翼是对称结构,所以仅需对一侧机翼进行气动分析,我们利用CFD软件Fluent来对一侧机翼进行分析。
为了简化分析,本文仅对刚性扑翼进行分析,而不考虑机翼柔性变形对流动产生的影响。
分析可得:扑翼时产生升力的大小与其扑翼速度有着密切的联系,瞬时扑翼速度越快,产生的升力越大,而且在下扑过程中产生的升力要比在上扑过程中产生的升力要大(如图3和图4所示)。
这与2006年6月23日美国科学家在《自然》杂志上报告的“其他鸟类(除蜂鸟外)飞翔时所需的升力全部来自翅膀下扇”结论是一致的[4]。
所以,我们在设计传动机构时,使其在下扑行程时具有急回特性,从而可以提供更大的升力。
图3 翼面压力云图(下扑速度最大时)图4 翼面压力云图(上扑速度最大时)
振动模态分析:扑翼机在空中飞行时,扑翼拍打产生振动。
因此我们对扑翼机整体进行动态分析,分析其固有频率是十分有必要的。
我们研究的是扑翼机的空中振动特性,不需要施加约束,所以使用自由状态固有频率分析。
我们指定计算模态阶数为30,计算结果取前15阶模态,各阶振型和固有频率如下表所示。
模态阶数模态振型固有频率(Hz)
1 左上翼1弯45.7275
2 右上翼1弯49.4701
3 右下翼1弯89.063
4 左上翼2弯112.092
5 左下翼1弯113.343
6 平尾1弯155.533
7 左上翼3弯209.624
8 右上翼2弯214.875
9 右下翼2弯261.8
10 机身平尾2弯292.069
11 左下翼2弯334.82
12 右上翼3弯384.889
13 右下翼3弯447.736
14 平尾垂尾弯扭451.461
15 左下翼3弯482.746
由此可以看出,全机固有频率偏高,而该扑翼飞行器的最大扑动频率才30Hz左右,很难引发共振。
从图中我们发现,全机振动变形主要集中在机翼和尾翼上,而机翼是飞机产生升力的主要结构,同时和尾翼一起为飞机提供操纵性。
可见机翼和尾翼的结构刚度对飞机安全性和操纵性影响很大。
所以根据此结论,需要对尾翼和机翼进行加固以提高其结构刚度。
图5 两翼升力曲线
扑动稳定性分析:我们通过动力学分析软件Adams对扑翼机构的运动进行分析。
首先,先在Adams里建立虚拟样机模型,之后,运用Delaurier条带理论[5]对小型扑翼机的一维拍动模型进行气动升力计算,再对Adams建立的虚拟样机施加气动力,计算并分析其升力曲线。
得到的两翼升力曲线如图5所示。
而且从图中可以看出,此机构两侧机翼的升力曲线完全重合,由此可以表明此扑翼机构的运动具有稳定性。
3 扑翼飞行器的制作
3D打印机打印出的扑翼传动机构零件是通过钢制轴钉来相互连接的,其不但具有一定的强度且表面光滑不会影响传动。
机身与尾翼各个组件是通过胶接的方式来进行连接的,具有一定的连接强度。
机翼的材料是聚酯薄膜,为保证机翼具有一定的刚度,在四片机翼上各加固了一根直径为0.5mm的碳杆。
尾翼采用0.6g的微型电磁舵机驱动,(驱动力矩)。
为使驱动升降舵的电磁舵机良好定中,我们想到利用磁性物体同性相斥的原理,在此电磁舵机下部通过胶接的方式固定一小块具有磁性的物体,使电磁舵机在初始时就受到一个向上的斥力从而舵面也可以保持在中立位。
扑翼飞行器试验机的整机实物图,如图6和图7所示。
图6 整机实物图1 图7 整机实物图2
5 结论
试验机的组装完成后,进行试飞等一系列试验,以检验结构强度。
气动特性等。
经过试飞表明,扑翼机的设计和制作工艺都能比较好地与预期效果吻合,达到了较为满意的结果。
当然,试飞之后也发现一些小问题。
其一是扑翼传动机构的齿轮由于冲击等原因而产生的滑齿现象,我们在加强了齿轮轴心处的连接后这种现象发生的几率明显下降。
其二是增加图传负载之后,平飞高度下降的问题,在适当改进设计更换较高转速电机之后有所改善。
参考文献:
[1] 张铮.仿生扑翼飞行器的动力特性分析及结构优化设计(应用型).哈尔滨:哈尔滨工业大
学硕士论文,2014.
[2]Wesi-Fogh T.Quick estimates of fiight fitness in hovering animals, including novel mechanism for lift Produetion.J ExP Biol.,1973,59:169-230
[3]刘岚,方宗德,侯宇等. 微扑翼飞行器的尺度律研究与仿生设计[J]. 中国机械工程,2005, 9(18):1613-1617.
[4]周凯.微扑翼飞行器动力学仿真及驱动机构优化设计.西安:西北工业大学硕士论文,2007.
[5]Delaurier J.D. An aerodynamic model for flapping-wing flight.Aeronautica journal[C],1993,125-130。