机械创新设计第七章 仿生原理与创新设计
机械创新大赛仿生蝴蝶原理
机械创新大赛仿生蝴蝶原理随着科技的不断发展,仿生学已经成为了各个领域的一个重要研究方向。
在机械工程领域,仿生学的应用也越来越广泛,尤其是仿生蝴蝶原理已经成为了机械创新大赛的热门议题。
那么,什么是仿生蝴蝶原理呢?
仿生蝴蝶原理指的是通过模仿蝴蝶的翅膀结构和运动方式,来设计并制造机械部件或者机械系统。
蝴蝶的翅膀具有轻巧、结构复杂、材料多样等特点,这些特点为机械系统的设计提供了新的思路。
另外,蝴蝶在飞行时能够实现高速、稳定、灵活和节省能源等特点,这些特点也能够为机械系统的设计提供参考。
仿生蝴蝶原理可以广泛应用于各个领域,如航空航天、机器人、风力发电等。
以飞行器领域为例,通过仿生蝴蝶原理可以设计出更加灵活、省能源的飞行器。
例如,湿性飞行器就是一种应用了仿生蝴蝶原理的机器人,在空气中行动时,通过振动机翼的方法来控制飞行方向和姿态。
同样,蝴蝶的颤翅飞行也可以为人们带来更为灵活和节能的新型飞行器。
在机械创新大赛中,选手们可以探究蝴蝶的翅膀结构、飞行方式等方面,进而设计和制造仿生机械系统或者机械部件。
例如,可以借鉴蝴蝶翅膀的结构来设计新型的机械材料,也可以仿照蝴蝶的颤翅飞行来设计更为灵活和节能的机器人。
总之,仿生蝴蝶原理不仅可以为机械工程带来全新的思路,而且还有很大的应用前景。
希望各位考生在参赛之前,能够广泛学习和研究仿生学的相关知识,进一步提升自己的创新能力和实践水平。
机械系统创新设计-7反求工程与创新设计

反求类型:实物反求、软件反求、影象反求 反求问题的提出: 反求问题的提出:60年代初
反求过程: 反求过程:研究、分析、消化过程——对已
知产品再创造过程——开发同类新产品
反求内容: 反求内容:分析设计思想
分析设计原理 分析结构形状 分析加工工艺及精度 分析材料 分析工作性能及维护与管理
反求特点: 反求特点: 依赖多种学科知识为基础 依靠信息情报为支撑 依照知识产权的各类规定
7.2 实物反求
分类: 分类 整机反求、部件反求、零件反求 特点: 特点:形象直观、可直接测量、有可比性、 反
求周期短
反求过程与内容: 反求过程与内容:准备阶段、实物分析、实物
分解、实物测绘、材料反求、关键性技术反求
• 反求过程与内容
1.准备阶段 1.准备阶段
准备反求对象的各种原始资料。说明书、使用手册、 广告等。据此搞清反求对象的功能指标。 准备反求过程中所需要的各种测试、实验、装拆等有 关资料和设备;制定测试与实验的规范,做好试车和 测试准备。
2.实物分析 反求设计思想、原理、 2.实物分析-反求设计思想、原理、性能
进行试车:对实验中的静态和动态数据进行科学 进行试车: 处理;对实验中出现的故障进行纪录 分析功能及原理:分析、分解功能原理,画出草 分析功能及原理 图,装配示意图,机构运动简图,搞清设计思想、 原理及性能
3.实物分解 3.实物分解-反求结构,分解原则:
7.3 软件反求
软件的概念:图纸、技术资料、产品样本、说
明书等。
软件反求特点:抽象性、智能性、科学性、综
合性、创造性。
反求过程与内容:论证(引进必要性和可行性)
分析(原理方案、技术条件)换算(标准的换算和 材料牌号的代换)计算和模拟实验
创新创业教育 5.1:仿生创新设计原理及分类
5.1 仿生创新设计原理及分类5.1.1仿生学与仿生机械学概述在长期的进化过程中,受到自然条件的严峻选择,为了生存和发展,自然界形形色色的生物各自练就了一套独特的本领。
例如,有利用天文导航的候鸟,有建筑巧妙的蜂窝,有能探测势源的响尾蛇;海洋中水母能预报风暴;老鼠能事先躲避矿井崩塌或有害气体;蝙蝠能感受到超声波;鹰眼能从三千米高空敏锐地发现地面上运动着的小动物;蛙眼能迅速判断目标的位置、运动方向和速度,并能选择最好的攻击姿势和时间。
人们在技术上遇到的许多问题、许多困难找不到正确解决的方法和途径,生物界早在千百万年前就曾出现,而且在进化过程中就已得到了很好的解决,人类应从生物界得到有益的启示。
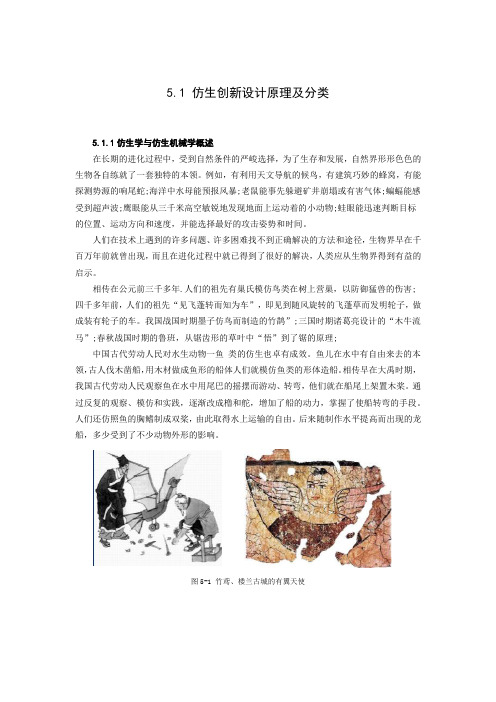
相传在公元前三千多年.人们的祖先有巢氏模仿鸟类在树上营巢,以防御猛兽的伤害;四千多年前,人们的祖先“见飞蓬转而知为车”,即见到随风旋转的飞蓬草而发明轮子,做成装有轮子的车。
我国战国时期墨子仿鸟而制造的竹鹊”;三国时期诸葛亮设计的“木牛流马”;春秋战国时期的鲁班,从锯齿形的草叶中“悟”到了锯的原理;中国古代劳动人民对水生动物一鱼类的仿生也卓有成效。
鱼儿在水中有自由来去的本领,古人伐木凿船,用木材做成鱼形的船体人们就模仿鱼类的形体造船。
相传早在大禹时期,我国古代劳动人民观察鱼在水中用尾巴的摇摆而游动、转弯,他们就在船尾上架置木桨。
通过反复的观察、模仿和实践,逐渐改成橹和舵,增加了船的动力,掌握了使船转弯的手段。
人们还仿照鱼的胸鳍制成双桨,由此取得水上运输的自由。
后来随制作水平提高而出现的龙船,多少受到了不少动物外形的影响。
图5-1 竹鸢、楼兰古城的有翼天使图5-2 木牛流马、龙舟研究生物系统的结构和特征、并以此为工程技术提供新的设计思想、工作原理和系统构成的科学,称为仿生学(bionics)。
仿生学不是仅仅外形相似即可,有些外形相似的仿造很失败,有些外形不像但是结构原理一致的仿生很成功。
图5-3 仿生结构5.1.2 仿生机械分类仿生机械(bio-simulation machinery),是模仿生物的形态、结构、运动和控制,设计出功能更集中、效率更高并具有生物特征的机械。
仿生学原理在机械设计中的应用

仿生学原理在机械设计中的应用一、仿生学原理概述仿生学是一门跨学科的科学,它通过观察和研究自然界生物的结构、功能和行为,从中吸取灵感,将其应用于人类技术的设计和创新中。
仿生学原理在机械设计中的应用,不仅能够提高机械的性能,还能促进机械与环境的和谐共生。
本文将探讨仿生学原理在机械设计中的应用,分析其重要性、挑战以及实现途径。
1.1 仿生学原理的核心概念仿生学原理的核心在于模仿自然界中的生物特性,将其转化为机械设计中的创新点。
这包括但不限于生物的形态、结构、材料特性以及行为模式等。
1.2 仿生学在机械设计中的应用领域仿生学在机械设计中的应用领域非常广泛,涵盖了从基础的机械结构设计到高级的智能控制系统等多个方面。
例如:- 形态仿生:模仿生物的形态,设计出更加符合流体力学原理的机械外形。
- 结构仿生:借鉴生物的骨骼和肌肉结构,提高机械的稳定性和承载能力。
- 材料仿生:利用生物材料的特性,开发新型的高性能材料。
- 行为仿生:模拟生物的行为模式,实现机械的智能化和自动化控制。
二、仿生学原理在机械设计中的实践2.1 仿生学原理在机械设计中的创新应用仿生学原理的应用在机械设计中带来了许多创新。
例如,模仿鸟类的飞行原理,设计出的无人机能够更加高效地在空中飞行;模仿蜘蛛丝的强度和韧性,开发出新型的高强度纤维材料。
2.2 仿生学原理在机械设计中的关键技术实现仿生学原理在机械设计中的应用,需要掌握以下关键技术:- 生物特性的分析与模拟:深入研究生物的特性,通过计算机模拟等手段,将其转化为机械设计的具体参数。
- 材料科学的应用:开发和应用新型的生物启发材料,提高机械的性能和耐久性。
- 智能控制技术:结合现代控制理论,模拟生物的智能行为,实现机械的自适应和自主控制。
2.3 仿生学原理在机械设计中的实施过程仿生学原理在机械设计中的实施过程是一个系统工程,主要包括以下几个阶段:- 需求分析:明确机械设计的目标和需求,确定仿生学原理的应用方向。
机械创新设计(较完整版)

机械创新设计(较完整版)第一讲1、机械创新设计与现代设计、常规设计有什么差异和关联?创新设计方法:充分发挥设计者的创造力,利用人类现有相关科学技术知识,实现创新构思,获得新颖性、创造性、实用性成果.特点:强调发挥创造性,提出新方案,提供新颖。
独特的设计方法,获得具有创新性、新颖性、实用性的成果。
现代设计:以计算机为工具,运用各类工程应用软件及现代设计理念进行的机械设计。
常规设计:常规设计是以应用公式、图标为先导,已成熟的技术为基础,借助设计经验等常规方法进行设计关联:机械常规设计始终是最基本的机械设计方法,在强调现代设计、创新设计时不可忽视其重要性。
创新设计的基础——常规、现代设计方法的综合、灵活运用。
现代设计方法仅仅借助了先进、高效的计算机应用手段,提高了设计过程的效率,但没有脱离常规设计的思维。
2.现代创新人才应具备那些基本素质?(1) 具备必须的基础知识和专业知识(2) 不断进取与追求的精神(3) 合理的创新思维方式(突破传统定式)(4) 善于捕捉瞬间的灵感(创新的必备条件)(5) 掌握一定的创新技法3.学习机械创新设计的内容有那些?1.机构的创新设计2.机构应用创新设计3.机构组合设计产生新机构系统4.机械结构的创新设计5.利用反求原理进行创新设计6.利用仿生原理进行创新设计第二讲1简述创造性思维四大特性(方法的开放性;过程的自觉性;解决问题的顿悟性;结果的独特性)。
影响创造性思维形成与发展的主要因素包括哪些?(1)天赋能力:与生俱来的所有神经元(2)生活实践:后天实践活动具有的重大意义(3)科学地学习与训练科学、简单易行的专业学习与训练2.了解和阐述创造性思维、创造活动、创造能力三者的关系。
3.理解综合、分离创造原理的特性和基本实施途径。
概念:有目的的将复杂对象分解,提取核心技术,并利用于其他新事物。
特征:1)与综合创造原理对立,但不矛盾;2)冲破事物原有形态的限制,在分离中产生新的技术价值;3)实质上综合法与分离法两者无明显界限,实践中常常相互贯穿,共同促成新事物。
机械设计中的仿生学原理与应用

机械设计中的仿生学原理与应用引言:机械工程是一门应用科学,涉及设计、制造、分析和维护各种机械系统的学科。
随着科技的发展,机械设计也在不断创新和演化。
仿生学作为一门跨学科的研究领域,将生物学原理应用于工程设计中,为机械工程师提供了新的思路和方法。
本文将探讨机械设计中的仿生学原理与应用。
1. 仿生学原理的介绍仿生学是从生物学中汲取灵感并将其应用于工程设计中的学科。
生物体在长期进化过程中形成了各种高效、适应性强的结构和功能。
机械工程师可以通过仿生学原理来设计更加优化的机械系统。
仿生学原理主要包括形态学仿生、结构仿生和功能仿生。
2. 形态学仿生在机械设计中的应用形态学仿生是指通过模仿生物体的外形和结构来设计机械系统。
例如,鸟类的翅膀结构启发了飞机的机翼设计,鱼类的鳞片结构启发了涂料和涂层的设计。
通过形态学仿生,机械工程师可以设计出更加轻量化、高强度和低阻力的机械结构。
3. 结构仿生在机械设计中的应用结构仿生是指通过模仿生物体的内部结构和组织来设计机械系统。
例如,蜂巢的结构启发了建筑材料的设计,骨骼的结构启发了机械零件的设计。
通过结构仿生,机械工程师可以设计出更加坚固、轻量化和高效的机械结构。
4. 功能仿生在机械设计中的应用功能仿生是指通过模仿生物体的功能和运动方式来设计机械系统。
例如,昆虫的感知和运动机制启发了机器人的设计,鱼类的游泳方式启发了水下机器人的设计。
通过功能仿生,机械工程师可以设计出更加智能化、灵活性强和高效的机械系统。
5. 仿生学在机械设计中的案例仿生学在机械设计中已经有了许多成功的应用案例。
例如,风力发电机的叶片设计借鉴了鲸鱼的鳍状结构,使得风力发电机的效率大幅提升。
另外,仿生学还在无人机、机器人和医疗设备等领域得到了广泛的应用。
结论:机械设计中的仿生学原理与应用为机械工程师提供了新的思路和方法。
通过借鉴生物学原理,机械工程师可以设计出更加优化、高效和智能的机械系统。
随着仿生学的不断发展,相信在未来的机械设计中,仿生学将发挥更加重要的作用。
机械设计中的仿生与生物启发原理

机械设计中的仿生与生物启发原理引言:机械工程作为一门应用科学,旨在研究和应用力学、热力学、材料学等知识,设计和制造各种机械装置和系统。
然而,近年来,仿生学和生物启发原理在机械设计中的应用越来越受到关注。
本文将探讨机械设计中的仿生学和生物启发原理的重要性和应用。
1. 仿生学的概念和原理仿生学是通过模仿生物体的结构、功能和行为,将生物学原理应用于工程领域的学科。
在机械工程中,仿生学的应用可以帮助我们设计出更高效、更可靠的机械装置。
例如,通过研究鸟类的飞行原理,我们可以设计出更轻巧、更节能的飞行器。
2. 生物启发原理在机械设计中的应用2.1 结构优化生物体的结构通常经过漫长的进化过程,具有高度优化的特点。
在机械设计中,我们可以借鉴生物体的结构优化原理,设计出更轻量化、更刚性的机械结构。
例如,通过模仿鸟类骨骼的中空结构,我们可以设计出更轻量化的飞机机身。
2.2 运动机制生物体的运动机制往往高度精确和高效。
在机械设计中,我们可以借鉴生物体的运动机制,设计出更高效的机械传动系统。
例如,通过研究昆虫的腿部结构和运动方式,我们可以设计出更灵活、更高效的机器人。
2.3 自适应性生物体具有自适应性,能够根据环境变化做出相应的调整。
在机械设计中,我们可以借鉴生物体的自适应性原理,设计出更智能、更适应环境的机械系统。
例如,通过研究植物的生长机制,我们可以设计出更智能的农业机械,实现精准农业。
3. 仿生学在机械设计中的应用案例3.1 鸟类飞行原理在飞行器设计中的应用通过研究鸟类的飞行原理,工程师们设计出了更轻巧、更节能的飞行器。
例如,将鸟类的翅膀结构应用于飞机机翼设计中,可以减少飞机的空气阻力,提高飞行效率。
3.2 昆虫运动机制在机器人设计中的应用通过研究昆虫的腿部结构和运动方式,工程师们设计出了更灵活、更高效的机器人。
例如,将昆虫的腿部结构应用于机器人的运动系统中,可以实现更自由、更精准的运动。
3.3 植物生长机制在农业机械设计中的应用通过研究植物的生长机制,工程师们设计出了更智能的农业机械。
机械设计中的仿生学原理与应用

机械设计中的仿生学原理与应用机械设计是一门复杂而富有挑战性的学科,而在这个领域中,仿生学原理的应用已经逐渐成为一个热门的话题。
仿生学是通过借鉴自然界中生物体的结构和功能,来解决工程设计中的问题。
本文将探讨机械设计中的仿生学原理与应用,并分析其中的优势和潜在的挑战。
一、仿生学原理的基础1. 结构仿生学:结构仿生学主要关注自然界中各种生物体的形态结构,例如动物的骨骼、植物的枝干等。
借鉴这些结构,我们可以设计出更轻巧、更坚固的机械结构。
例如,借鉴蜘蛛网的结构,我们可以设计出更为有效的网状结构,用于过滤固体颗粒的设备。
2. 运动仿生学:运动仿生学研究动物和植物的运动方式,通过模仿它们优秀的运动能力,来提高机械设备的性能。
例如,借鉴鱼类的游动方式,我们可以设计出更为高效的水下机器人,提高水下探测和作业的能力。
3. 功能仿生学:功能仿生学研究生物的功能特点,尤其是一些卓越的功能,例如鸟儿的飞行能力、昆虫的感知能力等。
通过模仿这些功能,我们可以设计出更为灵活和智能的机械设备,在各种环境和应用中发挥重要作用。
二、仿生学在机械设计中的应用1. 航空航天领域:在航空航天领域中,仿生学的应用非常广泛。
例如,借鉴鸟类的飞行方式,研究人员设计出了类似鸟翅的飞行器,大大提高了飞行效率。
此外,仿生学还可以应用于空气动力学设计、结构设计等方面,改进传统的设计方法。
2. 机器人技术:随着人工智能和机器人技术的快速发展,仿生学在机器人设计中扮演重要角色。
例如,借鉴昆虫的感知能力,我们可以设计出更为智能并具备环境适应性的机器人,能够执行复杂的任务,包括搜救、环境监测等。
3. 汽车设计:汽车工程领域可以借鉴仿生学原理优化汽车结构和性能。
例如,模拟鱼鳞的表面结构,可以减小汽车在高速行驶时的气动阻力,提高燃油利用率。
同时,借鉴昆虫的感知系统,可以改进车辆的智能驾驶技术,提高安全性和舒适性。
三、优势与挑战仿生学在机械设计中的应用带来了许多优势,例如提高了设计效率和性能,拓宽了设计思路,降低了成本和资源消耗等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在腿足机构的端点连接吸掌以后, 对掌机构的要求主要有: (1) 掌的姿态可以调节控制,以便在地壁过渡行走时适应壁面法线方向; (2) 调节掌机构的驱动装置尽可能安装到机器人机体上; (3) 爬壁机器人在壁面上移动时, 处于支撑相的掌与足端应没有限制转动的 强迫约束。
爬行壁虎机器人
图7-23 爬行壁虎机器人吸附机构
速影象系统记录与分析其运动情况,然后运用机械学的设计与分析方法,完 成仿生机械的设计过程,是多学科知识的交叉与运用。
2、避免“机械式”仿生: 生物的结构与运动特性,只是人们开展仿生创新活动的启示,不能采取
照搬式的机械仿生 飞机的发明史经历了从机械式仿生到科学仿生的过程。 机械式的仿生是研究仿生学的大忌之一。
图7-8 四足动物的腿部结构示意图
两足步行机器人
二、拟人型步行机器人
图7-9 多组动物的仿生腿结构 a)多足动物的仿生腿 b)仿四足动物的机器人结构
图7-10 拟人机器人腿部的理想自由度
图7-11 拟人机器人腿部6个自由度
图7-12 步行机器人ASIMO
图7-13 步行机器人ASIMO上楼梯
图7-14 “先行者”拟人型机器人
二、仿生机械学
仿生机械(bio-simulation machinery),是模仿生物的形态、结构、 运动和控制,设计出功能更集中、效率更高并具有生物特征的机械。
本章重点讨论仿生机械学 仿生机械学研究内容主要有功能仿生、结构仿生、材料仿生以及控制仿 生等几个方面。
三、仿生机械学中的注意事项
1、了解仿生对象的具体结构和运动特性: 仿生机械是建立在对模仿生物体的解剖基础上,了解其具体结构,用高
第四节 爬行与仿生机构的设计
一、仿生爬行机器人机构 1、爬壁机器人 1)足-掌机构 为了使仿生爬行机器人具有近似于爬行动物的运动特性,爬壁机器人对 足-掌机构都有特殊的要求。爬壁机器人对腿足机构的要求可归纳为以下主要 方面: (1) 腿机构具有足够的刚性和承载能力; (2) 腿机构具有足够大的工作空间; (3) 腿机构足端的支撑相直线位移便于控制。
3、注重功能目标,力求结构简单: 生物体的功能与实现这些功能的结构是经过千万年的进化逐渐形成的,
有时追求结构仿生的完全一致性是不必要的。 如人的每只手有14个关节,20个自由度,如果完全仿人手结构,会造成
结构复杂、控制也困难的局面。所以仿二指和三指的机械手在工程上应用较 多。 4、仿生的结果具有多值性:
图7-15 多种拟人型机器人
三、多足仿生步行机器人
1、多足仿生步行机器人的构造
图7-16 弓背蚁
图7-18 六足步行机器人
图7-17 多种拟人型机器人 a)四足仿生机器人 b)六足仿蟹步行Βιβλιοθήκη 器人2、多足步行仿生机器人实例
图7-19 新西兰六足步行机器人
图7-20 八足步行机器人Scorion 图7-21 六足仿生步行机器人
第七章 仿生原理与创新设计
第一节 仿生学与仿生机械学概述 一、仿生学
研究生物系统的结构和特征、并以此为工程技术提供新的设计思想、工 作原理和系统构成的科学,称为仿生学(bionics)。
仿生学的研究内容主要有: 1、机械仿生:
研究动物体的运动机理,模仿动物的地面走、跑、地下的行进、墙面上 的行进、空中的飞、水中的游等运动;运用机械设计方法研制模仿各种生物 的运动装置。
图7-22 复合足-掌机构结构略图 1-连杆 2、14-带轮 3-杆 4、6-压带轮 5-张紧轮 7-同步带 8-直线轴承 9-导柱 10-丝杠 11-螺母
2、力学仿生: 研究并模仿生物体总体结构与精细结构的静力学性质,以及生物体各组
成部分在体内相对运动和生物体在环境中运动的动力学性质。 例如,模仿贝壳修造的大跨度薄壳建筑,模仿股骨结构建造的立柱,既
消除应力特别集中的区域,又可用最少的建材承受最大的载荷。 3、电子仿生:
模仿动物的脑和神经系统的高级中枢的智能活动、生物体中的信息处理 过程、感觉器官、细胞之间的通信、动物之间通信等,研制人工神经元电子 模型和神经网络、高级智能机器人、电子蛙眼、鸽眼雷达系统以及模仿苍蝇 嗅觉系统的高级灵敏小型气体分析仪等。
由若干构件组成。
5
F 6n kpk k 1
n-构件数,k-运动副数,pk-运动副约束数
5
F 6n kpk k 1
pI 0, pI1 1, pIII 2, pIV 6, pV 11,
F=6×19-(2×1+3×2+4×6+5×11)=27 同理可求得手指部分的自由度为
4、化学仿生: 模仿光合作用、生物合成、生物发电、生物发光等。 例如利用研究生物体中酶的催化作用、生物膜的选择性、通透性、生物大
分子或其类似物的分析和合成,研制了一种类似有机化合物,在田间捕虫笼 中用千万分之一微克,便可诱杀一种雄蛾虫。 5、信息与控制仿生:
模仿动物体内的稳态调控、肢体运动控制、定向与导航等。例如研究蝙蝠 和海豚的超声波回声定位系统、蜜蜂的“天然罗盘”、鸟类和海龟等动物的 星象导航、电磁导航和重力导航,可为无人驾驶的机械装置在运动过程中指 明方向。
图7-5 微型气动人工肌肉结构件图
图7-6 ROMAC简图
第三节 步行与仿生机构的设计
一、有足动物腿部结构与运动分析 足端运行轨迹的测定与分析 大腿相对股骨关节转动角度 小腿相对膝关节转动角度 足底运动 —— 足底着地,足底平放,足底推离
图7-7 两足步行状态分析 a)人的不行状态 b)鸟类的步行状态
F=6×15-(4×5+5×10)=20
图7-1 仿生机械手
图7-2 人手臂示意图 a)人体上肢骨骼 b)人体上肢骨骼机构图 1-肩关节 2-肱骨 3-肘关节 4-尺骨、桡骨 5-腕关节 6-拇指骨 7-腕骨 8-掌骨 9-指骨
二、仿生机械手实例
图7-3 机械手抓取球体
图7-4 人工肌肉简图 a)人工肌肉的构造图 b)人工肌肉致动器简图
要选择结构简单、工作可靠、成本低廉、使用寿命长、制造维护方便的 仿生机构方案。 5、仿生设计的过程也是创新的过程:
要注意形象思维与抽象思维的结合,注意打破定势思维并运用发散思维 解决问题的能力
第二节 仿生机械手
一、仿生机械手的机构组成 仿生机械手机构的运动副及自由度仿生机械手的机构一般为开链机构,