双电机消隙
双电机消隙转台伺服系统的设计10

双电机消隙转台伺服系统的设计摘要:由于机械传动系统中齿轮轮齿的间隙会形成非线性误差,它影响着系统的动态性能和稳态精度。
本文针对齿轮传动中存在的齿隙非线性,以双电机驱动实现消除齿隙。
本文着重描述了该系统的控制原理和软硬件设计,根据所需消隙转矩和负载转矩、运动速度和加速度的关系,设计了实时消隙转矩补偿控制器实现系统完全消隙。
实验结果表明,采用双电机消隙的转台的定位精度得到有效的提高。
关键词:伺服系统;双电机消隙;定位精度0引言天线的性能参数如指向、波瓣宽度、增益等可以通过设计、计算和测试来确定,转台是天线性能参数测试时的主要设备,它可以为天线提供多种运动方式,并提供具体的位置信息。
但是由于机械加工时存在误差和机械磨损以及传动齿轮之间存在间隙,转台控制系统的跟踪精度和稳定性往往达不到预设的要求,所以消除齿轮间隙以提高传动精度显得尤为重要。
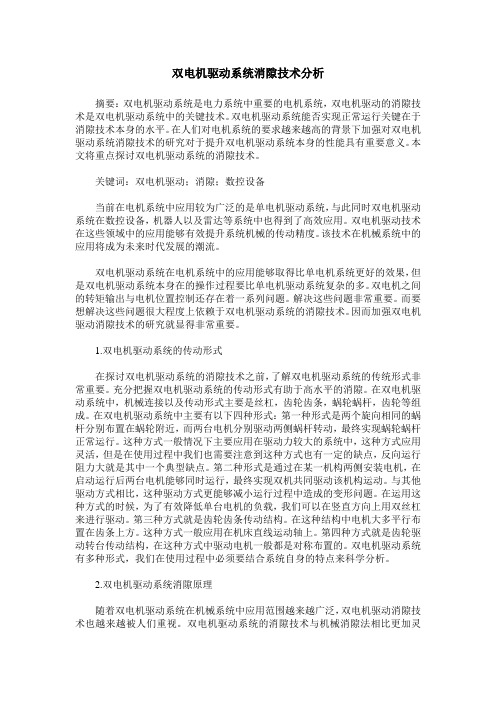
1实施方案1.1伺服系统硬件设计图1 双电机消隙伺服系统控制框架双电机消隙伺服系统控制框架如图所示,天线控制单元(威纶通触摸屏EMT3070A)通过自由协议和PCC间进行通信,实现速度指令、状态控制和状态信息等控制操作。
控制模块是实现系统闭环的关键环节,它接受来自编码器的转台位置参数和来自触摸屏、PCC的输入指令,对转台位置进行控制,并进行数字校正,实现转台的精确定位,同时监控转台运转情况,通过机械限位和软件监测实现转台的保护功能。
1.2双电机消隙原理采用双电机传动的方法来消除传动间隙,就要使一台电机工作在速度模式,作为消隙驱动的主动电机,输出的主动力矩和测试转台的运动方向一致;另外一台电机则工作在力矩控制模式下,作为消隙驱动的从动电机,为消隙机构的齿圈提供向后的张紧力。
图2 双电机消隙结构当转台顺时针运动时,电机1为速度控制模式,电机2为电流控制模式,两台电机分别作为主动电机和从动电机,力矩分别为M1、M2,则提供的总力矩M=M1-M2。
当转台工作在逆时针模式时,情况正好相反。
双电机驱动系统消隙技术分析
双电机驱动系统消隙技术分析摘要:双电机驱动系统是电力系统中重要的电机系统,双电机驱动的消隙技术是双电机驱动系统中的关键技术。
双电机驱动系统能否实现正常运行关键在于消隙技术本身的水平。
在人们对电机系统的要求越来越高的背景下加强对双电机驱动系统消隙技术的研究对于提升双电机驱动系统本身的性能具有重要意义。
本文将重点探讨双电机驱动系统的消隙技术。
关键词:双电机驱动;消隙;数控设备当前在电机系统中应用较为广泛的是单电机驱动系统,与此同时双电机驱动系统在数控设备,机器人以及雷达等系统中也得到了高效应用。
双电机驱动技术在这些领域中的应用能够有效提升系统机械的传动精度。
该技术在机械系统中的应用将成为未来时代发展的潮流。
双电机驱动系统在电机系统中的应用能够取得比单电机系统更好的效果,但是双电机驱动系统本身在的操作过程要比单电机驱动系统复杂的多。
双电机之间的转矩输出与电机位置控制还存在着一系列问题。
解决这些问题非常重要。
而要想解决这些问题很大程度上依赖于双电机驱动系统的消隙技术。
因而加强双电机驱动消隙技术的研究就显得非常重要。
1.双电机驱动系统的传动形式在探讨双电机驱动系统的消隙技术之前,了解双电机驱动系统的传统形式非常重要。
充分把握双电机驱动系统的传动形式有助于高水平的消隙。
在双电机驱动系统中,机械连接以及传动形式主要是丝杠,齿轮齿条,蜗轮蜗杆,齿轮等组成。
在双电机驱动系统中主要有以下四种形式:第一种形式是两个旋向相同的蜗杆分别布置在蜗轮附近,而两台电机分别驱动两侧蜗杆转动,最终实现蜗轮蜗杆正常运行。
这种方式一般情况下主要应用在驱动力较大的系统中,这种方式应用灵活,但是在使用过程中我们也需要注意到这种方式也有一定的缺点,反向运行阻力大就是其中一个典型缺点。
第二种形式是通过在某一机构两侧安装电机,在启动运行后两台电机能够同时运行,最终实现双机共同驱动该机构运动。
与其他驱动方式相比,这种驱动方式更能够减小运行过程中造成的变形问题。
一种双电机消隙伺服系统_程登元
关键词 : 消隙传动; 伺服系统; 脉宽调制; 多极旋转变压器
中图分类号 : T N957; T P273 文献标识码 : A 文章编号 : 1672 - 2337( 2009) 05 - 0392 - 05
A Kind of Double Motor Anti Backlash Mechanism Servo System
2
双电机消隙传动的原理
如图 1 所示 , 利用两套相同的电机 , 分别带动
两套完全相同的减速器 , 再由减速器的输 出轴小 齿轮带动负载轴大齿轮转动 , 通过伺服控制电路, 使大齿轮在启动和换向过程中始终受到偏置力矩 的作用, 两个小齿轮夹紧大齿轮 , 大齿轮无法在齿 轮间隙中来回摆动, 从而达到消除间隙 , 提高伺服 系统电路工作原理
由 D/ A 转换器将控制 电压转换成 10 V 模 拟量, 同时送入运放 1 和运放 2, 在运放 1 和运放 2 的输入端分别加入偏置电压 + V R 和 - V R , 其电压
图 3 双电机伺服控制系统原理图
幅度相同, 极性相 反。运放的 输出端加稳压二 极 管, 限制其输出的最大幅值, 形成饱和段特性曲线。 两个运放的输出分别送入 PWM 功放电路。PWM 功 放电路与伺服电机共同组成电流闭环控制, 运放的电 压与电机的电流呈线性关系, 而电机的电流又与电机 的输出力矩呈线性关系。因此, 改变 D/ A 转换器的 输出电压即可控制电机的输出力矩。 3. 3 R/ D 变换器 本系统采用单通道多极旋转变压器作为角度 测量装置, 其精度为 1 , 旋转变压器的定子固定在 天线基座上 , 转子随天线一起转动 。它的定子和 转子各有 16 对相互正交的绕组。 给定子绕组加励磁电压 : U = U m sin t , 当转 子的绕组轴线与定子励磁绕组轴线呈夹角 时, 两 个绕组中感应电动势分别为 U c = K Um co s( N ) sin t = U cm sin t U s = K Um sin ( N ) sin t = U sm sin t 式中, K 为变压比; N 为极对数, 在此等于 16。 显然, 转子的两个绕组输出电压的振幅与 它 的转角 的 N 倍呈正、 余弦关系, 包含着天线转角 的信息。 因此 , 利用这两个正余弦信号可确定天线 转角 。 为了便于计算机处理, 需要通过 R/ D 变换器 将旋 转 变 压 器 输 出 的 模 拟 量 转 换 成 数 字 量。 AD2S80 是单片 10 位、 12 位、 14 位或 16 位跟踪式 R/ D 变 换器。它采 用 BiMOS 工艺 制 造, 汇 集 了 CMOS 逻辑电路和双极型高精度线性电路的优点。
26966814_双电机同步消隙伺服系统的鲁棒滑模控制策略

2022年4月第50卷第2期Apr.2022Vol.50No.2现代防御技术MODERN DEFENCE TECHNOLOGY双电机同步消隙伺服系统的鲁棒滑模控制策略*李方俊,王生捷(北京机械设备研究所,北京100854)摘要:针对常见的双电机同步消隙伺服系统电流环、速度环、位置环控制结构,提出一种鲁棒性更强、响应速度更快的简化控制策略。
利用反步递推理论设计了伺服系统的位置控制器,由经指令滤波处理后的参考位置指令直接计算出力矩信号传递至电流环,简化了系统的控制结构;在反步控制器设计过程中引入积分非奇异终端滑模面,克服了线性滑模的抖动问题,并使得系统在有限时间内到达平衡状态;采用扩张状态观测器对总扰动进行补偿,使得系统对内部结构参数变化及外在扰动均具有较强的鲁棒性。
在Matlab/Simulink与Adams中进行了联合仿真实验,仿真结果表明,所研究的新型双电机同步消隙控制方法比传统方案具有更佳的跟踪性能,比普通的扰动补偿方法有更好的抗扰能力。
关键词:双电机同步消隙;指令滤波;反步法;积分非奇异终端滑模面;扩张状态观测器doi:10.3969/j.issn.1009-086x.2022.02.014中图分类号:TM921.2;TJ765;TP391.9文献标志码:A文章编号:1009-086X(2022)-02-0104-09 Control of the Dual-Motor Synchronous Anti-Backlash Servo Systemwith Robust Terminal Sliding Mode ControlLI Fang-jun,WANG Sheng-jie(Beijing Institute of Mechanical Equipment,Beijing100854,China)Abstract:Aiming at the common current loop,speed loop and position loop control structure of dual-motor synchronous anti-backlash servo system,a simplified control strategy with stronger robustness and faster response speed is proposed.The positon controller of the servo system is designed based on the backstepping theory and the torque reference command is directly calculated and transmitted to the cur‑rent loop from the reference position command after command-filter processing,which simplifies the con‑trol structure.The integral nonsingular terminal sliding surface is introduced in the backstepping control‑ler design process which overcomes the chattering problem of the linear sliding mode control and makes the system reach the equilibrium state in finite time.The extended state observer(ESO)is adopted to compensate the external disturbance which makes the servo system more robust to the changes of the in‑ternal structure parameters and external disturbance torque.The co-simulation experiment is carried out in Matlab/Simulink and Adams and the results show that the proposed new dual-motor synchronous anti-backlash method has better tracking performance than tradition scheme and better anti-disturbance abil‑ity than the ordinary disturbance compensation method.☞测试、发射技术☜*收稿日期:2021-09-23;修回日期:2021-12-02第一作者简介:李方俊(1993-),男,湖南常德人。
双电机消隙

2 3 1
1 0 0 N F
TP Ei A Mn R o a Pn i D o k
i
i t s y s t e m
Masterห้องสมุดไป่ตู้Slave
3. 原理与运行模式—计算
精加工(黄色区域) 这时主动齿轮箱的输出力由安全系数C乘上加速力。 F2M_ max = c x F2a F2M_ max根据移动部件重量 m 和切削力 FP决定 => m2M_max = c x m F2M_Pmax= c x FP
Vorlagen Nr.: 1097-D005821 Rev.: 02
Ei 3,5m到 4 m X-轴 Y-s m a A Mn R o a Pn i D o k
T
P
i
i t s y s t e m
齿轮-齿条传动(龙门移动式)
3. 计算(计算)
较大的工作台面积 负载分配比(重量/切削力)70:30
i
i t s y s t e m
Master-Slave(齿轮-齿条传动主从消隙)
2.原理与运行模式—运行模式
黄色区域: 精加工(加速度较小) 灰色区域: 粗加工或快进(加速度较大), 两个小齿轮朝一个方向工作。 两个小齿轮扭矩方向相反— 无间隙
Vorlagen Nr.: 1097-D005821 Rev.: 02
优缺点g无间隙消除了齿面之间的间隙g更高的刚性2x单个刚性g更好的动态性能两个驱动单元同时工作g更高的精度因为更好的刚性和零间隙g可选用更小的减速箱电机齿轮齿条h成本更高2套驱动单元h更大的体积2x电机2x齿轮箱h更长的调试时间teamrapidovorlagennr
TP Ei A Mn R o a Pn i D o k
双电机消隙
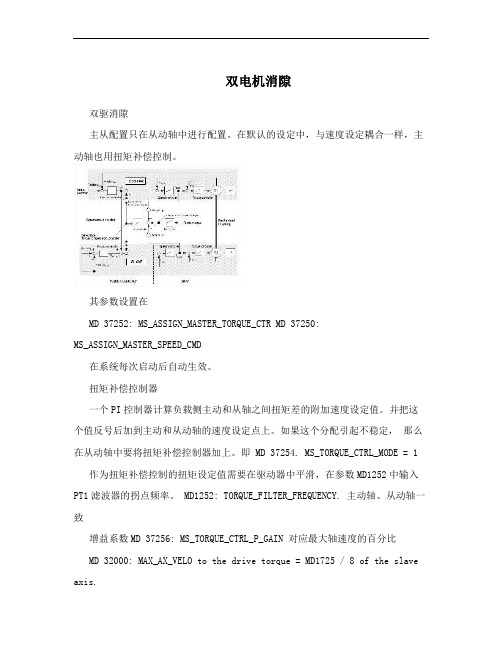
双电机消隙双驱消隙主从配置只在从动轴中进行配置。
在默认的设定中,与速度设定耦合一样,主动轴也用扭矩补偿控制。
其参数设置在MD 37252: MS_ASSIGN_MASTER_TORQUE_CTR MD 37250:MS_ASSIGN_MASTER_SPEED_CMD在系统每次启动后自动生效。
扭矩补偿控制器一个PI控制器计算负载侧主动和从轴之间扭矩差的附加速度设定值。
并把这个值反号后加到主动和从动轴的速度设定点上。
如果这个分配引起不稳定,那么在从动轴中要将扭矩补偿控制器加上。
即 MD 37254. MS_TORQUE_CTRL_MODE = 1 作为扭矩补偿控制的扭矩设定值需要在驱动器中平滑,在参数MD1252中输入PT1滤波器的拐点频率。
MD1252: TORQUE_FILTER_FREQUENCY. 主动轴、从动轴一致增益系数MD 37256: MS_TORQUE_CTRL_P_GAIN 对应最大轴速度的百分比MD 32000: MAX_AX_VELO to the drive torque = MD1725 / 8 of the slave axis.在默认设定中积分部分是无效的积分时间常数 MD 37258: MS_TORQUE_CTRL_I_TIME 以秒为单位输入。
扭矩补偿控制器的输出受参数MD 37260: MS_MAX_CTRL_VELO.的限制设定 MD 37256: MS_TORQUE_CTRL_MODE = 3或MS_TORQUE_CTRL_P_GAIN = 0,就可以使扭矩补偿控制器无效。
扭矩的分配可以通过扭矩补偿器的输入变量参数化。
从动轴的驱动扭矩可以用MD37268加权。
MD 37268: MS_TORQUE_WEIGHT_SLAVE,而主动轴的MD 37268: MS_TORQUE_WEIGHT_SLAVE, =(100 –MS_TORQUE_WEIGHT_SLAVE).当使用扭矩补偿器时机械耦合绝对是必须的,否则驱动器会从静止加速。
双电机电气消隙与单电机机械消隙对比

双电机电气消隙与单电机机械消隙对比导语:本文从原理、性价比、结构等方面说明双电机电气消隙与单电机机械消隙的区别。
一)机械消隙产品(法国REDEX产品):单个电机输入两个齿轮输出形式,(REDEX产品为一个电机输入,两个减速机带齿轮输出,通过专利技术,在减速机中间加预负载,运用机械原理将减速机内部及齿轮齿条之间的背隙全部消除)如图示:二)双电机电气消隙产品(德国STOBER产品):双电机输入两个齿轮输出形式(即,两个电机输入,两个减速机带齿轮输出,运用电气控制,致使一个电机驱动的时候,另一个电机进行制动,将齿轮齿条及减速箱内部背隙全部消除)如图示:德国STOBER双电机电气消隙与其他消隙产品的比较:STOBER电气消隙系统特点如下:结构区别:双电机电气消隙原理是将其中一个电机做制动处理,从而取得预加载力。
也就是说,一个电机驱动一个电机制动,从而消除减速机及齿轮齿条的背隙;性能优越:重复定位精度可以达到0.01(1道以内);控制灵活:需要大力矩加速的时候,两个电机可以同时驱动;硬件要求:齿条和减速机的精度没有要求,可以通过电气补偿方式让消隙效果达到最好;成本控制:比同等的欧洲机械消隙产品成本低;发展前景:性能优越、精度高、成本低,在竞争日益激烈的市场中越来越受到各个厂家的青睐;同行业应用:目前中国生产大型机床,龙门镗铣、落地镗等需要做齿条传动消隙处理的机床基本上都使用的是STOBER双电气消隙产品,主要客户应用情况见部分客户列表REDEX机械式消隙系统特点如下:结构区别:单电机机械消隙实际是通过反向的扭动其中一个齿轮来获取预加载力,也就相当于将一个齿轮固定,在另一个齿轮上加了一个扭力弹簧;性能一般:只能满足一般应用(重复定位精度一般都在0.02以上);模式固定:机械方式预设的单一工作模式,不能根据实际需求做调整;硬件要求:减速机和齿条的精度要求比较高,硬件产品的精度越高消隙效果越好,相应的增加了硬件的成本;发展现状:机械消隙产品设计巧妙,通过简单的结构消除了齿轮与齿条之间的背隙,随着社会发展,机床精度要求越来越高,机械消隙产品已经不能满足应用,越来越多的被高精度、低成本的电气消隙产品所取代。
双电机电气消隙

双电机电气消隙
未来数控机床的发展趋势主要是大型和重型,因而机床的行程越来越长,对精度的要求也就越来越高。
要消除齿轮齿条传动中产生的背隙,有两种方式,一是:机械消隙,二是双电机电气消隙。
机械消隙是单个电机输入两个齿轮输出的形式,目前有法国的REDEX.而双电机消隙属于双电机输入两个齿轮输出的形式。
双电机消隙目前有德国的STOBER以及台湾的SunUs等。
双电机消隙就是两个电机通过齿轮与赤道仪的主齿轮啮合,并按双电机消隙控制曲线进行驱动,永远不会出现两个电机输出转矩同时为零的情况,即任何时候两个电机至少有一个会对主齿轮施加不为零的转矩,在此转矩的作用下,主齿轮的运动间隙就不可能存在。
当然,此转矩必须大于转动链本身的摩擦力矩。
在实际消隙方式下,当系统需要的输出合力矩为零(静止)时,两通道电机的电枢电流为±Io(消隙偏置电流),其输出力矩大小相等方向相反;当系统需要的输出合力矩增加时,两通道电机的电枢电流随图二的曲线变化,其中一个通道的输出力矩将继续增加,另一个通道的输出力矩逐渐减小至零再增加,由阻力源变为动力源
双电机消隙的优势。
相对于机械消隙,双电机消隙具有性能上的优势,重复定位精度可达到0.01;控制灵活,需要加大扭力是,两个电机可
以同时驱动,而两个电机反方向驱动是可消除背隙;成本控制,由于是同时使用两个伺服电机,股伺服电机的型号可选用较小的,这样成本不会高于机械消隙;双电机消隙具有良好的发展前景,由于其性能优越,精度高,成本低,在竞争日益激烈的市场中越来越受到各大厂家的青睐。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
齿轮-齿条传动(龙门移动式)
t
s y
2. 普通齿轮-齿条传动特点
s
t
e
?两侧的驱动单元获得相同的位置控制命令,能同步到达对应位置。
m
?由于齿条自身的节距误差以及安装误差,齿条与齿轮间会产生间隙,并且
这种结构自身无法消除。
? 两驱动单元互相之间无法形成张力
20 :.ve R
128 500 D-79 01 :.r N ne galroV
n
i
R a
o
Pn
i
D o
k
i
Master-Slave (齿轮-齿条传动主从消隙)
t
s
y s
2.原理与运行模式 —运行模式
t
e
m
灰色区域 :
粗加工或快进(加速度较大), 两个小齿轮朝一个方向工作。
黄色区域 : 精加工(加速度较小)
两个小齿轮扭矩方向相反 — 无间隙
02 ev.: R
821 005 97-D 10 r.: N en Vorlag
1
20 :.ve R
128 500
2
3
D-79
01
:.r
N
ne galroV
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave (齿轮-齿条传动主从消隙)
t
s
y
s t
1. 电消隙结构—张力消除间隙
e
m
(1)两个齿轮箱之间存在张力,这样
controller
4
可以避免齿轮齿条之间的间隙,以及
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave
t
s y
2. 原理与运行模式 —图形
Load direction
s t
Master
e
m
F2M
contra flank
F2M
change over
Slave
F2S
F2M
20 :.ve R
equal flank
128 500 D-79 01 :.r N
02 ev.: R
821 005 97-D 10 r.: N en Vorlag
maXY5TE-s轴mPi 到 4 m
A M
n
i
R a
o
Pn
i
D o
k
i
t
齿轮-齿条传动(龙门移动式)
s y
3. 计算(计算)
s
t e
较大的工作台面积
负载分配比(重量/切削力)70:30
m
原因:Y轴的质量的变化(重心变化)会导致两侧运行不同步
ne galroV
F2S
TP
FE i
A M
n
2Ra io PiSn
D o
k
i
Master-Slave
t
s y
2. 原理与运行模式 —图形
s t
Master
e
m
F2M
Load direction
Contra flank
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
齿轮-齿条传动(龙门移动式)
t
s y
3. 计算(1 )
s
t
整个传动系统的性能决定了负载如何分配(如横梁的刚性)
e
m
非龙门式结构
高刚性要求
负载分配比(重量/切削力)50:50
龙门式结构 高刚性要求 高刚性要求
负载分配比(重量/切削力)60:40 负载分配比(重量/切削力)70:30
e
m
设计要求:两个齿轮箱之间的安装距离
a通常需要大于单根齿条的长度,这样
两个齿轮不会同时在一根齿条上工作,
否则有可能损坏齿条安装螺钉。
a
20 :.ve R
128 500 D-79 01 :.r N ne galroV
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave (齿轮-齿条传动主从消隙)
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
一 、普通齿轮-齿条传动
t
s
二 、Master-Slave ( 齿轮-齿条传动主从消隙)
y
s
t
e
m
20 :.ve R
128 500 D-79 01 :.r N ne galroV
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
齿轮-齿条传动结构形式
t
s
y s
单驱动
i
齿轮-齿条传动(龙门移动式)
t
s y
1. 结构
s
t
e
m
3
2 1
两套独立的电机-齿轮箱-小
齿轮驱动单元(1) ,通过机械
联接(横梁2),在两侧不同的齿
3
条上啮合 (3) .
(比如:Z轴、X轴)
1
20 :.ve R
128 500 D-79 01 :.r N ne galroV
TP
Ei
A M
n
i
R a
t
s
y
s t
2. 原理与运行模式 —原理
e
m
Master Slave
Master: 主动单元
Slave: 从动单元,用于与主动 单元之间产生张力
02 ev.: R 821 005 97-D 10 r.: N en Vorlag
Pre-load torque 张力 Master Slave
TP
Ei
A M
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave
t
s y
2. 原理与运行模式 —消隙运行过程
s
t
e
m
位置一
位置 1: 从动小齿轮改变贴合齿面 -改变过程中没有间隙 -系统刚性临时减低
齿面切换
02 ev.: R 821 005 97-D 10 r.: N en Vorlag
位置 2: 主动小齿轮改变贴合齿面 -改变过程中无间隙 -系统刚性临时减低 位置二
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave (齿轮-齿条传动主从消隙)
t
s y
1. 主从电消隙整体结构结构
s
t
e
m
(1)两套相同的电机-齿轮箱-小 齿
轮。
controller
4
(2)(3)通过机械结构联接 ,在 同一根齿条上啮合。
(4)两个单元由同一个驱动器控
制(master-slave)。
齿轮箱自身的间隙。
(2)张力大小由切削力的大小决定。
1
20 :.ve R
128 500
2
3
D-79
01
:.r
N
ne galroV
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
Master-Slave (齿轮-齿条传动主从消隙)
t
s
y
s t
1. Design - electrical pre-loaded
龙门式双驱动
单边消隙
龙门式双边消隙
t
e
m
结构
间隙
有间隙
有间隙
无间隙
无间隙
应用领域
普通定位精度
较大的移动重量
高定位精度 驱动部分零间隙
高定位精度 机械 驱动部分零间隙
较大的移动重量
02 ev.: R
821 005 97-D 10 r.: N en Vorlag
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
02
ev.:
R 821
高加速度 a, 高重量 m ,短间距 s
005
97-D 10 r.: N
en Vorlag
TP
Ei
A M
n
i
R a
o
Pn
i
D o
k
i
齿轮-齿条传动(龙门移动式)
t
s y
4. 应用
s
t
e
- 龙门移动式加工中心
m
- 激光切割机
02 ev.: R
821 005 97-D 10 r.: N en Vorlag