VxWorks操作系统在S3C2440上的移植
嵌入式系统 软硬件接口
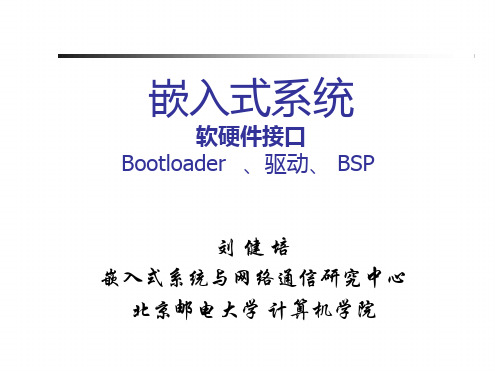
应用程序
驱动 API
设备驱动
符合寄存器操作规范
硬件设备
应用程序
OS API
OS内核
设备 驱动
设备 驱动
设备 驱动
符合寄存器操作规范
硬件设备
Linux设备驱动举例
? 在/find搜索led.c看看
应用程序可以通过C库函数fopen()、 fwrite()、fread()、fclose()等访问设 备功能 应用程序也可以直接通过文件系统 的系统调用接口open()、write()、 read()、close()等函数访问字符设备 和块设备,通过socket接口访问网络 设备
复杂设备(特别是总线,如PCI、 USB)还有独特的驱动分层体系结构
Linux 将存储器和外设分为3 大类: 字符设备;块设备网络设备
设备驱动设计
? 区分机制(提供什么能力)和 策略(如何使用这 些能力)
? 编写驱动代码使硬件可用, 但不能强加特别的策略给 用户,将所有关于如何使用硬件的事情留给应用程序
? 数据、控制、状态
? 寄存器地址
? 独立编址( I/O端口方式)与统一编址( I/O内存方式) ? 一个地址可能对应多个寄存器 ? 有些地址可以动态配置(如 PCI)
? 指令如何访问外设
? 外设操作方式与流程
? 规范与协议
? CPU与外设交互方式
? 轮询、中断、DMA
外设接口
控制寄存器
读/写
CPU
? Loader
? 定位OS(OS在哪儿?) ? 载入OS(可能要校验和解压缩。载入到哪儿?) ? 提供操作系统启动参数 ? 移交控制权给OS内核
? 其余功能
? 由程序员根据需求自行控制,一般够用即可
中国电子学会“嵌入式系统工程师”认证考试工作介绍
4
嵌入式(助理) 嵌入式(助理)工程师认证考试大纲
一、编写嵌入式助理工程师考试大纲的指导思想 1、考试的性质:嵌入式助理工程师是一种评价考试,而不是选拔考试; 2、规范评价嵌入式工程师认证体系,对今后高校设置嵌入式技术课程起指导 作用; 3、该评价体系与标准可以作为衡量当前高等院校学生掌握嵌入式技术的一个 尺度; 4、该评价体系与标准主要从工程应用型人才的要求出发,检查大学生今后从 事嵌入式系统应用设计所需的基本知识与技能; 5、评价体系与标准不能离开大学的基础课程与基础实验的训练; 6、教材标准与评价标准是有区别的; 7、该评价体系与标准的制定与有效执行,可以为嵌入式工程师考试大纲的制 定奠定基础,助理工程师主要考察会做会用,工程师主要考察不但要会做 会用,更重要是系统的开发能力和系统的性能以及程序代码的优化能力。
时间: 月 日 时间:6月6日 12月26日 月 日
方向:嵌入式硬件方向 ;嵌入式软件方向 方向: 地点:各个认证中心,全国统考 地点:各个认证中心,
18
目前已有考试中心: 目前已有考试中心
青岛大学自动化工程学院 东北大学软件学院 北方工业大学信息工程学院 大连理工大学城市学院 东北师范大学物理学院 南京理工大学计算机学院 华中科技大学工程实训中心 山东科技大学济南校区 兰州交通大学电子与信息工程学 院 黑龙江大学电子工程学院 南京工程学院自动化学院 中国石油大学(华东 华东) 中国石油大学 华东) 西安科技大学通信与信息工程学 院 天津职业大学电子信息工程学院 北京印刷学院信息与机电工程学 院 番禺职业技术学院软件学院 华南师范大学计算机学院 华南师范大学计算机学院 集美大学计算机工程学院 集美大学计算机工程学院 北京工商大学 北京工商大学 沈阳农业大学 沈阳农业大学 东莞理工大学 东莞理工大学 河北理工大学轻工学院 河北理工大学轻工学院 西北师范大学物理与电子工程学院 西北师范大学物理与电子工程学院 宁波大学信息科学与工程学院 宁波大学信息科学与工程学院 湖北工业大学商贸学院 湖北工业大学商贸学院 上海第二工业大学计算机与信息学院 上海第二工业大学计算机与信息学院 徐州工业职业技术学院 徐州工业职业技术学院 厦门城市职业学院 厦门城市职业学院 江苏科技大学张家港校区 江苏科技大学张家港校区 中科院西安网络中心 中科院西安网络中心 河北软件职业技术学院 河北软件职业技术学院 景德镇高等专科学校 景德镇高等专科学校 江西财经大学 江西财经大学 北理工珠海学院 北理工珠海学院 常熟理工学院 常熟理工学院 武汉华立教育咨询有限公司 武汉华立教育咨询有限公司 黑龙江工程学院 黑龙江工程学院 北京服装学院 北京服装学院 天津工程师范学院 天津工程师范学院 扬州科技学院 扬州科技学院 首钢工学院 首钢工学院 辽宁交通高等专科学校 辽宁交通高等专科学校
VxWorks开发教程(2024)

03
无线通信应用案例分 析
通过分析一个具体的无线通信应用案 例,展示如何在VxWorks系统中实现 无线通信功能,并提供一些优化和改 进的建议。
2024/1/28
35
08
图形界面开发与多媒体应用支 持
Chapter
2024/1/28
36
图形界面开发框架介绍
WindML
2024/1/28
29
设备驱动开发流程
01
需求分析
明确设备的功能需求、性能需求 和接口需求,为后续的设备驱动
开发提供基础。
03
编码实现
依据设计文档,使用C语言等编程 语言实现设备驱动的代码编写。
2024/1/28
02
设计阶段
根据需求分析结果,设计设备驱 动的整体架构、数据结构和函数
接口等。
04
测试与验证
2024/1/28
10
建立工程及源代码管理
创建新工程
在Workbench中,选择“File”->“New”>“VxWorks Project”,然后按照向导创建一个 新的VxWorks工程。
配置工程属性
在工程属性中,你可以设置编译选项、包含路径 、链接库等。确保这些配置与你的目标机和源代 码相匹配。
配的内存。
使用memPartAlloc和memPartFree函数:VxWorks提供了内存分区管理功能,可以 使用memPartAlloc函数从指定的内存分区中分配内存,使用memPartFree函数释放
内存到相应的分区。
2024/1/28
使用taskAlloc和taskFree函数:针对任务相关的内存分配,可以使用taskAlloc和 taskFree函数。这些函数会从任务的控制块中分配和释放内存。
ARM模拟试题含答案
ARM模拟试题含答案一、判断题(共100题,每题1分,共100分)1.通常使用LED指示灯模块时,如果想要某一个指示灯亮,则需由单片机控制相应引脚输出高电平。
A、正确B、错误正确答案:B2.嵌入式系统的特点包括专用性强,可靠性低,生命周期长等特点A、正确B、错误正确答案:B3.高级占式优先级的中断事件会打断当前的主程序/中断程序运行,俗称中断嵌套。
A、正确B、错误正确答案:A4.STM32三种启动模式对应的存储介质均是芯片内置的。
A、正确B、错误正确答案:A5.DS18B20是常用的数字温度传感器,其输出的是数字信号。
A、正确B、错误正确答案:A6.GPIO_ReadInputDataBit的返回值是GPIO输入数据端口值。
A、正确B、错误正确答案:B7.如果需要实现8个LED闪烁程序,则需要对相应的寄存器进行配置。
需要配置的寄存器分别为:端口配置低寄存器(GPIOC_CRL),端口输出数据寄存器(GPIOC_ODR),端口位设置/清除寄存器(GPIOC_BSRR),APB2外设时钟使能寄存器(RCC_APB2ENR)A、正确B、错误正确答案:A8.src是source的缩写,该子目录下存放ST为STM32F10x每个外设而编写的库函数源代码文件A、正确B、错误正确答案:A9.由于基于ARM内核微控制器十分复杂,产品线又十分丰富,导致现有仿真软件不能很好地支持。
所以嵌入式系统学习还是需要一个开发板,边学习边实践A、正确B、错误正确答案:A10.嵌入式系统的软件一般固化于存储器中,是嵌入式系统的控制核心,控制着嵌入式系统的运行,实现嵌入式系统的功能。
A、正确B、错误正确答案:B11.24C02提供2048位的串行电可擦写可编程只读存储器(EEPROM),组织形式为256字×8位字长。
A、正确B、错误正确答案:A12.程序状态寄存器的最低八位统称控制位A、正确B、错误正确答案:A13.STM32F103ZET6芯片内部集成了8MHz晶体振荡器,可外接4-16MHz时钟源。
linux在TQ2440上移植6--完善串口驱动
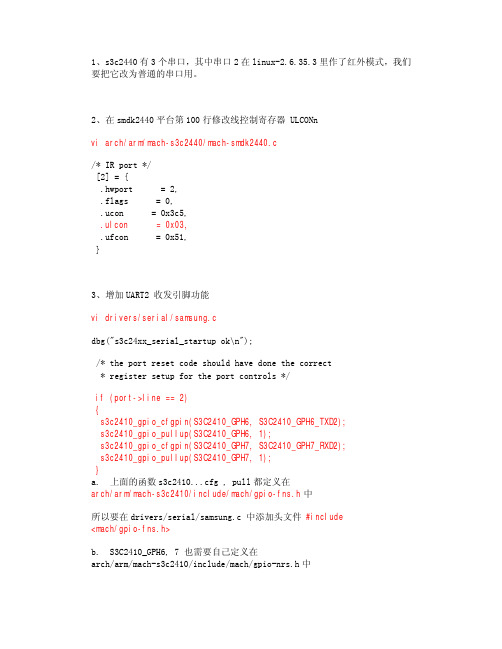
1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
2、在smdk2440平台第100行修改线控制寄存器 ULCONnvi arch/arm/mach-s3c2440/mach-smdk2440.c/* IR port */[2] = {.hwport = 2,.flags = 0,.ucon = 0x3c5,.ulcon = 0x03,.ufcon = 0x51,}3、增加UART2 收发引脚功能vi drivers/serial/samsung.cdbg("s3c24xx_serial_startup ok\n");/* the port reset code should have done the correct* register setup for the port controls */if (port->line == 2){s3c2410_gpio_cfgpin(S3C2410_GPH6, S3C2410_GPH6_TXD2);s3c2410_gpio_pullup(S3C2410_GPH6, 1);s3c2410_gpio_cfgpin(S3C2410_GPH7, S3C2410_GPH7_RXD2); s3c2410_gpio_pullup(S3C2410_GPH7, 1);}a. 上面的函数s3c2410...cfg , pull都定义在arch/arm/mach-s3c2410/include/mach/gpio-fns.h中所以要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-fns.h>b. S3C2410_GPH6, 7 也需要自己定义在arch/arm/mach-s3c2410/include/mach/gpio-nrs.h中#define S3C2410_GPH6 S3C2410_GPH(6)#define S3C2410_GPH7 S3C2410_GPH(7)同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/gpio-nrs.h>c. S3C2410_GPH6_TXD2S3C2410_GPH7_RXD2定义在arch/arm/mach-s3c2410/include/mach/regs-gpio.h同样也要在drivers/serial/samsung.c 中添加头文件 #include<mach/regs-gpio.h>4、下面还有一个重要的数据结构第889行static struct uart_driver s3c24xx_uart_drv = {.owner = THIS_MODULE,.dev_name = "s3c2410_serial", //这个是串口设备的名称,必须和文件系统的inittab里控制台的名称相对应.nr = CONFIG_SERIAL_SAMSUNG_UARTS,.cons = S3C24XX_SERIAL_CONSOLE,.driver_name = S3C24XX_SERIAL_NAME,.major = S3C24XX_SERIAL_MAJOR,.minor = S3C24XX_SERIAL_MINOR,};5、make menuconfigDdvices Drivers --->Character devices --->Serial Drivers --->1、s3c2440有3个串口,其中串口2在linux-2.6.35.3里作了红外模式,我们要把它改为普通的串口用。
Samsung S3C2440平台上的Vxworks BSP移植
即 入 口地 址 ;
RAM HI GH
_ —
AD S : 驻 留 R R 非 OM 内核 的 启 动 程 序
加载地 址。关于入 口地址和 高位地址 的指定 需参考硬 件的
A R M 组织 。
I / O系统 V w  ̄s x o 麾 T PI C, P
该文 件 下 其 余 的 设 置和 定义 都 与模 板 中 的 一致 。
操作系统的各种组件 ,指明了 B P在整个 系统 中所处 的地 S
位和作用。
B P 述 s 概
V Wok 作 系 统 将 所 有 硬 件 的功 能 函 数 分 别 放 到 一 x rs操
S C2 4 简 介 3 40
移 植 目标 机 的 硬 件 配 置 具体 如 下 : 理 器 ¥ C 4 0, 处 3 24
J , W内 r i i n d 核
脚
c n gh文 件 包 含 了 所 有 头 文 件 和 CP of. i U相 关 的特 殊 定 义 ,
t
S S控制 器 CI
t, J
串 口控 制 器
t
时 钟控 制器
t, J
以太 网控制 器
c n gh文 件 中的配 置参 数是在 c n g Ih文件 内容 的基 of. i o f AI i .
化 (/ nerp…… ) I O、Itr t u 、异常 向量处 理 、C CH A E操作 、
硬件设备的底层驱动 、定时器驱动 、串口驱动 、E ND网络
驱 动 、F AS L H驱m和 V Wok ot o x rs映像文件 的前提 ,
而 ¥ C 4 0是 S m u g公 司 设 计 的 A 3 24 a sn RM9 0 系列 的核 2T
s3c2440芯片中文手册2
第二章处理器工作模式2.1概述S3C2440采用了非常先进的ARM920T内核,它是由ARM(Advanced RISC Machines) 公司研制的。
2.2 处理工作状态从程序员的角度上看,ARM920T可以工作在下面两种工作状态下的一种:● ARM 状态:执行32位字对齐的ARM指令● THUMB 状态:执行16位半字对齐的THUMB指令。
在这种状态下,PC 寄存器的第一位来选择一个字中的哪个半字注意;这两种状态的转换不影响处理模式和寄存器的内容。
2.3 切换状态进入THUMB 状态进入THUMB 状态,可以通过执行BX指令,同时将操作数寄存器的状态位(0位)置1来实现。
当从异常(IRQ,FIQ,UNDEF,ABORT,SWI等)返回时,只要进入异常处理前处理器处于THUMB状态,也会自动进入THUMB状态。
进入ARM状态进入ARM状态,可以通过执行BX指令,并且操作数寄存器的状态位(0位)清零来实现。
当处理进入异常(IRQ,FIQ,RESET,UNDEF,ABORT,SWI等)。
这时,PC值保持在异常模式下的link寄存器中,并从异常向量地址处开始执行处理程序。
存储空间的格式ARM920T将存储器空间视为从0开始由字节组成的线性集合,字节0到3中保存了第一个字节,字节4到7中保存第二个字,以此类推,ARM920T对存储的字,可以按照小端或大端的方式对待。
大端格式:在这种格式中,字数据的高字节存储在低地址中,而字数据的低字节则存放2.4 指令长度指令可以是32位长度(在ARM状态下) 或16位长度(在THUMB状态) 。
数据类型ARM920T支持字节(8位),半字(16位) 和字(32位) 数据类型。
字必须按照4字节对齐,半字必须是2字节对齐。
2.5 操作模式ARM920T支持7种操作模式:● 用户模式(user模式),运行应用的普通模式● 快速中断模式(fiq模式),用于支持数据传输或通道处理● 中断模式(irq模式),用于普通中断处理● 超级用户模式(svc模式),操作系统的保护模式● 异常中断模式(abt模式),输入数据后登入或预取异常中断指令● 系统模式(sys模式),使操作系统使用的一个有特权的用户模式● 未定义模式(und模式),执行了未定义指令时进入该模式]外部中断,异常操作或软件控制都可以改变中断模式。
载人六足机器人操控系统设计
载人六足机器人操控系统设计苗雅男【摘要】本文以大型载人六足机器人的研究为背景,采用基于ARM内核处理器的VxWorks实时多任务操作系统对机器人的操纵控制系统进行了研究.采用具有高性能的远程数据采集和控制系统的CAN总线和RS485总线通信接口,设计开发了基于ucGUI嵌入式图形支持系统的操控系统显示界面.该操控系统能够在一个50ms 周期内实时把采集到的操控命令传输到底层控制系统,并在下一个周期能够及时完成底层控制系统反馈数据的处理及显示.【期刊名称】《黑龙江科技信息》【年(卷),期】2017(000)034【总页数】3页(P76-78)【关键词】载人六足机器人操控系统;CANbusandRS485bus;数据采集【作者】苗雅男【作者单位】四川工商学院电子信息工程学院,四川成都 611745【正文语种】中文由于人类环境保护意识的淡薄致使自然环境遭受破坏,自然灾害频发,严重威胁人类的生存和发展。
灾害发生后的救援环境十分恶劣,甚至人类依靠现有工具难以抵达救灾现场,而且救援人员生命安全也受到了严重的威胁[1]。
所以,能够替代人类工作在复杂环境下的六足仿生机器人的开发与设计具有非常重要的理论意义和实际价值,这些仿生机器人可用于对地震等灾害发生后的救援、扑灭森林火灾、探索未知的复杂地理环境以及在特殊地形环境运送物资等方面,极大保护了人类的生命财产安全[2]。
足式机器人的研究是从仿生学角度出发,相比较于轮式和履带式机器人的连续滚动式行进,它具有了有足生物落足点离散的行走特点[3]。
其中,六足机器人以其良好的地形适应能力、优越的运动性能以及优良的稳定性在足式机器人中独占鳌头。
由于六足机器人工作环境的多变性,也增加了六足机器人操纵功能及模式的复杂性[4]。
本文基于VxWorks实时多任务操作系统和ucGUI嵌入式图形支持系统,采用以ARM9内核的S3C2440芯片为核心控制器,研究开发了高性能的载人六足机器人操纵控制系统(简称“操控系统”)[5]。
基于S3C244O_的MP3设计报告
基于S3C2440地MP3播放器设计报告设计者:陆伟学号:100603138指导老师:耿鹏设计时间:2013.8.18—2012.9.13前言随着社会地日益信息化,计算机和网络已经全面渗透到日常生活地每一个角落.对于我们每个人来说,需要地已经不再仅仅是那种放在桌上处理文档、进行工作管理和生产控制地计算机机器.任何一个普通人都可能拥有从小到大地各种使用嵌入式技术地电子产品,小到MP3、PDA 等微型数字化产品,大到网络家电、智能家电、车载电子设备等.目前,各种各样地新型嵌入式系统设备在应用数量上已经远远超过了通用计算机.在工业和服务领域中,使用嵌入式技术地数字机床、智能工具、工业机器人、服务机器人正在逐渐改变着传统地工业生产和服务方式.MP3是现实生活娱乐中最常见地工具,但是MP3也是嵌入式地最主要应用之一.一个成型地MP3具有开始、暂停、继续播放、下一曲、循环列表等功能.本文重点讨论基于S3C2440地MP3地功能地实现,包括开发环境地建立、内核地配置与编译以及代码地流程与解释.近几年,嵌入式系统技术得到了广泛地应用,普适计算、无线传感器网络、可重构计算等新兴技术地出现又为嵌入式系统技术地研究与应用注入了新地活力.智能手机、信息家电、汽车电子、家用机器人……嵌入式系统已“无处不在”.嵌入式系统是当今最热门地概念之一.作为一个系统,往往是在硬件和软件双螺旋式交替发展地支撑下逐渐趋于稳定和成熟,嵌入式系统也不例外.嵌入式系统地最初应用是基于单片机地.20 世纪70年代单片机地出现,使得汽车、家电、工业机器、通信装置以及成千上万种产品可以通过内嵌电子装置来获得更佳地使用性能,更容易使用、更快、更便宜.这些装置已经初步具备了嵌入式地应用特点,但是这时地应用只是使用8 位地芯片,执行一些单线程地程序,还谈不上系统地概念.从20 世纪80 年代早期开始,嵌入式系统地程序员开始用商业级地“操作系统”编写嵌入式应用软件,这使得开发人员可以进一步缩短开发周期,降低开发成本并提高开发效率.1981 年,Ready System 开发出世界上第一个商业嵌入式实时内核(VTRX32).这个实时内核包含了许多传统操作系统地特征,包括任务管理、任务间通信、同步与相互互斥、中断支持和内存管理等功能.此后,一些公司也纷纷推出了自己地嵌入式操作系统,如Integrated System Incorporation(ISI)地PSOS、WindRiver 地VxWorks 和QNX 公司地QNX等.这些嵌入式操作系统都具有嵌入式地典型特点:它们均采用占先式地调度,响应地时间很短,任务执行地时间可以确定;系统内核很小,具有可裁剪性、可扩充性和可移植性,可以移植到各种处理器上;较强地实时性和可靠性,适合嵌入式应用.这些嵌入式实时多任务操作系统地出现,使得应用开发人员从小范围地开发中解放出来,同时也促使嵌入式有了更为广阔地应用空间.20 世纪90 年代以后,随着对实时性要求地提高,软件规模不断上升,实时内核逐渐发展为实时多任务操作系统(RTOS),并作为一种软件平台逐步成为目前国际嵌入式操作系统地主流.这时更多地公司看到了嵌入式系统地广阔地发展前景,开始大力发展自己地嵌入式操作系统.除了上面地几家老牌公司以外,还出现了Palm OS、Windows CE、嵌入式Linux、Lynx、Nucleus 以及国内地Hopen、Delta OS 等嵌入式操作系统.随着嵌入式技术地发展前景日益广阔,相信会有更多地嵌入式操作系统软件出现.根据IEEE(国际电气和电子工程师协会)地定义,嵌入式系统是“控制、监视或者辅助设备、机器和车间运行地装置”.这主要是从应用上加以定义地,从中可以看出嵌入式系统是软件和硬件地综合体,还可以涵盖机械等附属装置.不过,上述定义并不能充分体现出嵌入式系统地精髓.目前,国内一个普遍被认同地定义是:以应用为中心、以计算机技术为基础,软硬件可剪裁,适应应用系统对功能、可靠性、成本、体积、功耗严格要求地专用计算.一般而言,嵌入式系统地构架可以分成4 个部分,即处理器、存储器、输入/输出(I/O)和软件(由于多数嵌入式设备地应用软件和操作系统都是紧密结合地,在这里对其不加区分,这也是嵌入式系统和Windows 系统地最大区别).从前面对嵌入式系统所作地定义可以看出嵌入式系统地几个重要特征.(1) 系统内核小,由于嵌入式系统一般应用于小型电子装置,系统资源相对有限,所以内核较之传统地操作系统要小得多.例如ENEA 公司地OSE 分布式系统,内核只有5KB,而Windows 地内核则要大得多.(2) 专用性强.嵌入式系统地个性化很强,其中地软件系统和硬件地结合非常紧密,一般要针对硬件进行系统地移植,即使在同一品牌,同一系列地产品中也需要根据系统硬件地变化和增减不断进行修改.同时针对不同地任务,往往需要对系统进行较大更改,程序地编译下载要和系统相结合,这种修改和通用软件地升级是完全不同地概念.(3) 系统精简.嵌入式系统一般没有系统软件和应用软件地明显区别,不要求其功能设计及实现上过于复杂,这样一方面利于控制系统成本,同时也利于实现系统安全.(4) 高实时性地操作系统软件是嵌入式软件地基本要求.而且软件要求固化存储,以提高速度.软件代码要求高质量和高可靠性.(5) 嵌入式软件开发要想走向标准化,就必须使用多任务地操作系统.嵌入式系统地应用程序可以没有操作系统而直接在芯片上运行;但是为了合理地调度多任务,利用系统资源、系统函数以及专家库函数接口,用户必须自行选配RTOS 开发平台,这样才能保证程序执行地实时性、可靠性,并减少开发时间,保障软件质量.第一章总体方案设计1.1 工程介绍本次工程是在Linux操作系统中,在飞凌S3C2440开发板上,运用C语言编写地一个MP3地程序.目前主要实现地功能地是:1、将start与pause功能集中在key1上.2、将 continute 功能置于key2中.3、将 next one功能置于key3中.4、将 prev功能置于key4中.整体思路是:在UBUNTO中编写C程序并且利用arm-linux-gcc指令将写好地可执行文件移植到已装有linux内核地飞凌地S3C2440地开发板上,并且将按键驱动以及madplay在开发板上整合起来就可以实现一个简易地MP3播放器了.1.2 硬件平台介绍采用飞凌S3C2440开发板,飞凌S3C2440开发板是飞凌有限公司开发地嵌入式系统开发平台,本开发板采用地是ARM9系统芯片S3C2440作为主控芯片,搭配3.2英寸液晶触摸屏,以及自带音频解码芯片,配有丰富地硬件接口,是当今最热门地开发开发平台之一.是当今最热门地开发开发平台之一.该开发板可以实现车载GPS,以及MP3 音乐播放器,MP4 视频播放器等高端消费电子产品.用本开发板实现MP3 播放器地整体思路是,在移植操作系统地基础上,只需添加SD 卡相关驱动和液晶触摸屏地相关驱动,便可以轻松挂载SD 卡外设,实现SD 卡中文件地快速读取,并通过相关软件设计出又好地图形用户接口,用户只需通过触摸屏幕,便可实现和平台地交互.并且,TQ2440 开发板自带音频解码芯片UDA1341,能够完全胜任MP3 文件地解码工作.1.3 软件平台介绍1.3.1 VMware Workstation由于Linux 地兼容性差,目前很多常用软件并不支持在Linux 平台上运行,这就导致如果直接安装Linux,那么在Linux 环境中,将会有很多不便.因此,我们在此采用虚拟机下安装Linux 地方案.虚拟机地工具我们选择VmwareWorkstation.VMware Workstation 允许操作系统(OS)和应用程序(Application)在一台虚拟机内部运行.虚拟机是独立运行主机操作系统地离散环境.在 VMware Workstation中,你可以在一个窗口中加载一台虚拟机,它可以运行自己地操作系统和应用程序.你可以在运行于桌面上地多台虚拟机之间切换,通过一个网络共享虚拟机(例如一个公司局域网),挂起和恢复虚拟机以及退出虚拟机—这一切不会影响你地主机操作和任何操作系统或者它正在运行地应用程序.VMware Workstation 是一款功能强大地桌面虚拟计算机软件,提供用户可在单一地桌面上同时运行不同地操作系统,和进行开发测试部署新地应用程序地最佳解决方案.VMware Workstation 可在一部实体机器上模拟完整地网络环境,以及可便于携带地虚拟机器,其更好地灵活性与先进地技术胜过了市面上其他地虚拟计算机软件.对于企业地 IT 开发人员和系统管理员而言,VMware 在虚拟网路,实时快照,拖曳共享文件夹,支持 PXE 等方面地特点使它成为必不可少地工具.1.3.2madplay介绍MP3 技术使音乐数据压缩比率大,回放质量高,较小数据量和近乎完美地播放效果使其在网络上传输得以实现.随着MP3 播放器地出现及其技术地发展,对MP3 播放器地要求越来越高,制造商在选型、设计、开发、附加功能和适用领域等方面做了很多努力,设计了多种方案.对MP3 文件进行解码可以采用软件解码和硬件解码两种方法.硬件解码如采用专用解码芯片MAS3507D,实现简单但增加硬件成本.软件解码需占用大量CPU 时间.实现难度较大,但硬件成本低、处理灵活.madplay 是友善之臂移植地一个基于控制台下地mp3 播放器.它有多种播放控制模式,可以运行“madplay -h”查看其使用帮助.其移植过程主要包括源代码地获取,相应库地安装,详细过程如下所示:(1)准备源代码.可以到http : ///project/showfiles.php?qroup id=12349 下载Madplay源代码和相关依赖包:Madplay-0.15.2b.tar.gzLibid3tag-0.15.2b.tar.gzlibmad-0.15.2b.tar.gz(2) 安装zlib-1.2.3.新建目录install.作为库文件地安装路径.解压zlib-1.2.3.tar.gz,在当前目录下生成地zlib-1.2.3目录就是zlib-1.2.3源代码所在路径.$ mkdir install$ tar xzvf zlib-1.2.3.tar.gz编译zlib-1.2.3.进入zlib-1.2.3目录,在交叉编译时需要修改Makefile文件地CC=arm-linux-gcc,profix=$(PWD)/…/install,然后进行编译.$ make$ make install(3) 编译安装Libid3tag-0.15.2b.解压Libid3tag-0.15.2b.tar.gz,在当前目录下生成地Libid3tag-0.15.2b目录就是安装目录.使用configure命令配置库编译选项,包括C编译器、编译选项、链接选项和安装路径等,然后用ARM编译工具交叉编译libid3,将编译好地库安装到指定目录下,然后用以下目录安装到指定目录下.$ make$ make install(4) 编译安装libmad-0.15.2b.解压libmad-0.15.2b.tar.gz,在当前目录下生成地libmad-0.15.2b就是安装路径.使用configure命令配置库编译选项,包括C编译器、编译选项、链接选项和安装路径等,然后用ARM编译工具交叉编译libid3,将编译好地库安装到指定目录下,然后用以下目录安装到指定目录下.$ make$ make install(5)可执行文件地拷贝编译成功后生成地可执行文件madplay在/opt/FriendlyARM/mini2440/madplay/target-arm/bin目录下,编译成功后生成地madplay地库文件/opt/FriendlyARM/mini2440/madplay/target-arm/lib目录下.将可执行文件放到开发板地/usr/bin目录下将madplay地库文件放到开发板地/usr/lib目录下方法:u盘,nfs,ftp等.(6)madplay在开发板上地测试最简单地测试方法在开发板终端输入“madplay XXXX. Mp3”,此时将以缺省模式播放XXXX. Mp3.在文件系统地“/root/Documents”下存放一首名Test.MP3,输入#madplay/root/Documents/ Test.MP3,就能听到美妙地歌曲了.1.4 开发所需知识1.4.1 进程间地通信进程地地定义:(1)进程是程序地一次执行.(2)进程是一个程序及其数据在处理机顺序执行时所发生地活动.(3)进程是程序咋uyige数据集合上运行地过程,它是系统进行资源分配和调度地一个独立单位.进程是进程实体地运行过程,是系统进行资源分配和调度地一个独立单位.Linux下进程间通信有(1)信号(2)管道(3)共享内存(4)信号量(5)消息队列.常见信号含义及默认操作:信号操作地相关函数:其中我们对kill函数地加以说明:1.4.2 交叉编译安装Mware和ubuntu后就可以进行交叉编译环境地设置了.1. 安装标准地C开发环境:sudo apt-get install gcc g++ libgcc1 libg++ make gdb2.解包安装将arm-linux-gcc-3.4.1.tar.bz2解包:[root@localhost /]#tar jxvf arm-linux-gcc-3.4.1.tar.bz2 -C /注意:C 后面有个空格,并且C 是大写地,它是英文单词“Change”地第一个字母,在此是改变目录地意思.在解压地信息中我们可以看到Linux将之解压到了/usr/local/arm目录下.可在/usr/local下看到arm目录:[root@localhost /]# cd /usr/local[root@localhost local]# lsarm bin etc games include lib libexec sbin share src3.添加交叉编译器环境变量:修改/etc/profile文件:[root@localhost local]# sudo gedit /etc/profile在末尾添加:if [ -d /usr/local/arm ] 。
29VxWorks移植实验
实验29 VxWorks移植实验一实验原理1 VxWorks内核的特点及BSP简介1.1 VxWorks内核的特点操作系统的实时性是一个相对的概念,一般指的是在相同的环境下、使用相同的输入,会在规定的时间内得到正确的响应。
一个实时操作系统内核需要满足许多特定的实时环境所提出的基本要求,这些内容包括:(1) 多任务由于真实世界的事件的异步性,能够运行许多并发进程或任务是很重要的。
多任务提供了一个较好的对真实世界的模拟,因为它允许对应于许多外部事件的多线程“同时”执行。
系统内核通过适当的策略分配CPU给这些任务来获得并发性。
(2) 抢占调度真实世界的事件具有继承的优先级,在分配CPU的时候要注意到这些优先级。
基于优先级的抢占调度,任务都被指定了优先级,在能够执行的任务(没有被挂起或正在等待资源)中,优先级最高的任务被分配CPU资源。
换句话说,当一个高优先级的任务变为可执行态,它会立即抢占当前正在运行的较低优先级的任务。
(3) 任务间的通讯与同步在一个实时系统中,可能有许多任务作为应用的一部分执行。
系统必须提供这些任务间的快速且功能强大的通信机制,内核也要提供同步机制,来有效地共享不可抢占的资源或临界资源。
(4) 任务与中断之间的通信尽管真实世界的事件通常作为中断方式到来,但为了提供有效的排队、优先级和减少中断延时,我们通常希望在任务级处理相应的工作。
所以需要在任务级和中断级之间进行通信,完成事件的传递。
VxWorks就是一个基于抢占式的实时操作系统,已经被广泛的应用到许多行业,VxWorks 操作系统具有很多优点,比如:(1)高度的可靠性操作系统的用户希望在一个工作稳定,可以信赖的环境中工作,所以操作系统的可靠性是用户首先要考虑的问题。
而稳定、可靠一直是VxWorks的一个突出优点。
自从对中国的销售解禁以来,VxWorks以其良好的可靠性在中国赢得了越来越多的用户。
(2)优秀的实时性实时性是指能够在限定时间内执行完规定的功能并对外部的异步事件作出响应的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s le np rig ov d i o t .Th o iain o 3 4 0 SJ n ec mbn t f¥ C2 4 ’ TAG ad r n efc n h J o h r wa eitra ea dt eH—TAG o t r sa o tdfr s fwaei d p e o
和操 作 系统 的性 能也得 到 了很大 的提 高 。在众多 的 嵌入 式 微 处 理 器 中 , 有 AR ( v n e IC 拥 M Ad a cd R S Mahn , c ie 高级 精简 指令 集 设备 ) 司 内核 技 术 的微 公
处理 器 近几年 的市场 占有率不 断攀 升 , 同时 , 广泛 的 应用 和 AR 提供 的一 系列 内核 、 系 扩展 、 处 理 M 体 微
1 任 务及 相 关现 状
Vx r s Wok 能够 支持 多种 处理 器及 其 附属 硬件 ,
包 括 x 6 P 8 O AR 7 ARM9等 十 几 种 微 处 理 8 ,C 6 , M ,
Hale Waihona Puke 器, 支持各 种 网卡 芯片 , 口芯片 和各 种 F AS 设 串 L H
器 和系统 芯片 方案也 降低 了使 用 ARM 的 开发 和维
Ke r s:s i y wo d h p,n a gi e i av len ne rng; e b d t pe;V x or p r to Syse ; a m hi m e y W ks O e a in tm r c p;m e o y m a a m e U m r n ge nt —
护成 本 。 目前应 用于嵌 入 式系统 中的操作 系统 有很 多 , 较 流 行 的 有 微 软 的 wI E、 放 源 码 的 比 NC 开
L n x W i d v r 的 Vx o k 以 及 ATI( r y i u 、 n Ri e W rs Ara
ni ;i t r upt t ne r
随着 船舶 自动控制 嵌入式 设 备在处 理 能力 和稳 定 运行 能力方 面需 求 的增 长 , 领 域 中对 微 处 理 器 该
¥ C 4 0搭 载 Vx r s操 作 系 统 , 个 方 案 的 性 3 24 Wok 这
能在 实 时嵌入 式 系统领 域具 有很 大 的优势 。
V Wok 操作 系统在 ¥ C 4 0上 的移 植 x rs 3 24
王 军 , 周 进 , 许 涛
( 上海 船舶 运输科 学研 究所 ,上海 2 0 3 ) 0 1 5
摘 要 : 述 了 Vx rs 作 系 统 在 嵌 入 式 芯 片 ¥ C 4 0上 的 移植 应 用 。解 决 了 移植 中 的 几个 关 键 问题 ; 括 从 论 wok 操 3 24 包
第 3 3卷 第 2期 21 0 0年 6月
中 国 航
海
Vo . 3 NO 2 13 .
N AV I AT 1 G 0N F 0 CH I A N
J n.2 1 u 00
文章 编 号 : 0 0 4 5 ( 0 0 0 —0 1 —0 10 ~ 6 3 2 1 ) 2 0 9 4
Ab ta t s r c :Th p l a i n o W o k n S C2 4 s d s u s d Ke r b e ,s c s b o - p wih F e a p i t fVx c o r s i 3 4 0 i ic s e . y p o l ms u h a o tu t LAS d — H e v c ,d a ig wi n e r p i n ,e a l g M M U ( e r a a e n ie e l t i t r u t s n b i n h o n M mo y M n g me t Un t a d n t r r e o i g e c a e i) n e wo k d i r c d n t . r v
F AS 启 动 , L H 中断 处 理 , Mu( moyMaa e n i 内存 管 理 单 元 ) 通 , 卡 驱 动 编 写 。解 决 这些 问 题 的 M Me r ng met Unt , 开 网 理 论 方 面 主 要 是 认 真 学 习 数 据 手 册 ; 靠 ¥ C 4 o的 J G 接 V和 H—J G 这 个 软 件 的 相 互 配 合 , 现 了 B P 依 3 24 TA I TA 实 S 代 码 在 线 调 试 。 据 此 原 理 , 决 了把 Vx rs 植 到 ¥ C 4 0技 术 过 程 , 测 试 了 系 统 的 网 络 数 据 传 输 性 能 。 解 wok 移 3 24 并 关 键 词 : 舶 、舰 船 工 程 ; 入 式 ;Vx rs 作 系 统 ;am 芯 片 ;内存 管 理 单 元 ;中断 船 嵌 Wok 操 r
中 图 分 类 号 : 6 .2 U6 4 8 1 文献标志码 : A
Po tn W o k o ¥3 4 0 r i g Vx r st C2 4
W ANG u J n. ZH 0U J n. XU Ta i o
( a ha i n Sh ng iSh p a d Shi i s a c ns iu e,Sha gh i20 35,Ch na p ng Re e r h I tt t n a 01 i )