信号调理板接连接雷达模块示意图
汽车维修技术资料:别克GL8维修电路图(倒车雷达系统连接器端视)

11.5.2.2 倒车雷达系统连接器端视图左后角部倒车雷达探头左后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号 2BK (黑色)2379E倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 OG (橙色) 2376 左后中间倒车雷达探头信号 2BK (黑色)2379D倒车雷达探头低电平基准右后角部倒车雷达探头右后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 PU (紫色) 2378 右后角部倒车雷达探头信号 2BK (黑色)2379B倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 D-GN (深绿色) 2377 右后中间倒车雷达探头信号 2BK (黑色)2379C倒车雷达探头低电平基准倒车雷达探头控制模块接头零件信息l12124957l24路F 安普模块 MODULAR(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号2 OG (橙色) 2376 左后中间倒车雷达探头信号3 D-GN (深绿色) 2377 右后中间倒车雷达探头信号4 PU (紫色)2378 右后角部倒车雷达探头信号 5 - - 未用 6-7 - - 未用 8 - - 未用 9-1011 PU (紫色) 739A 点火装置1电压12 GY (灰色) 2616 后置停车辅助系统停用开关 13-14 -- 未用15 BK/WH(黑色/白色) 2379B 倒车雷达探头低电平基准 16 - - 未用 17 1819 L-BU (浅蓝色)2380 后置停车辅助系统信号输出 20 - - 未用 21 - - 未用 22OG (橙色)900灯控制23L-GN(浅绿色)24A 倒车灯供电电压24BK(黑色)350H接地。
车载防撞雷达研究与设计
车载防撞雷达研究与设计作者:李海涛田宇航任震赵静来源:《电子技术与软件工程》2018年第19期摘要车载防撞雷达作为汽车主动安全的核心,可有效降低事故发生概率。
本文设计并实现了一个车载防撞雷达系统,并提出一种新的目标探测算法,通过测试实验,该系统达到了预期设计指标。
【关键词】防撞雷达多目标配对 DSP LFMCW雷达车载防撞雷达是主动式安全技术的核心部件,其可以对目标实现自主检测,同时判断是否报警等功能。
本文围绕车载防撞雷达系统展开了研究,分析其基本工作原理,搭建车载防撞雷达硬件平台,研究雷达系统的目标探测算法,实现汽车防撞雷达的测速和测距功能。
1 车载防撞雷达的基本原理车载防撞雷达目的是获取目标的距离速度信息,根据策略采取有效措施并主动报警。
1.1 车载防撞雷达测距测速原理线性调频连续波(LFMCW)雷达调制方式简单,具有优良测距能力并且功率小,是车载防撞雷达最常用的一种方式,因此采用LFMCW作为本文车载防撞雷达系统的工作体制。
LFMCW体制雷达的工作原理是将信号的频率按照一定的线性斜率进行调制并发射,利用回波的时延来解算目标的信息。
当目标运动时,目标会和雷达产生相对速度(具有多普勒频移),但存在距离速度耦合,LFMCW通过采用不同斜率的调制波来去除耦合效应,从而完成对距离和速度的解算。
1.2 车载防撞雷达的总体设计要求道路环境的复杂决定了雷达系统应能够快速并且能够精准的探测本车周围目标。
根据使用要求,对车载防撞雷达系统提出以下总体指标要求:中心载频(f):24.125GHz波长(λ):12.4mm扫频带宽(B):250MHz距离分辨率(△R):<1m速度分辨率(△v):<1m/s水平波束宽度:≥15°测距范围:1m-50m最大可测速度:30m/s更新时间:≤40ms2 车载防撞雷达硬件系统的设计2.1 雷达系统的整体结构方案车载防撞雷达系统的整体结构方案见图1所示,系统以常见的LFMCW雷达系统为基础,主要是由收发天线、射频前端、中频信号调理模块、信号处理模块、调制波发生器组成。
X波段宽带雷达发射机的设计

l X 波段 宽 带雷达 发射 机 的概述
雷达是利用物体发射 电磁波 的特 点来发现探测 目标 ,并 确 定 目标 的距离 、 方位、 高度 以及速度等参数 。在雷达运行过 程 中, 当雷达 发现 目标后会发射无线 电信 号, 而这种无线 电信 号 的发射是 由发射机来完成 的,雷达发射机为雷达提供一个 早搏受 到调制 的大功率射频信号 ,经馈线和收发开关 由天线 辐射 出去 。在 V波段宽带雷达发射机 中, x波段 宽带雷达是
了将信号完整地传 输到接收端,调制器必须完整地将信号还 原成原始信息 。在信号处理模块 中,声 电转换 的关键元件就
是振动膜 , 当膜片接 收到信号时, 就会 引起 电场发生变化, 利
扰能力 , 在 雷达工作 时, 有时需要它在几个频率上 同时工作 。
x波段 宽带雷达发射和接受 一个很窄的波束, 绝大部分 的能量
都集中在主波束里 , 每 一束波 都包含 一系列的电磁脉冲信 号。 在 x波 段宽带雷达 发射机 中, X 波段 雷达代表 的是发射 的电磁 波频率范围 。在非相控阵单雷达条件下 ,高频 的波段具有精 确度高、 定位更准确 的特点 , 而低频波段 的作用范 围远 , 发现 目标的距离大 。正是 由于这一特点 , x波 段宽带雷达 一般作 为短距离的火控雷达 。
确保每一项参数都达标, 进而提高发射机 的可靠性 。
2 : 3 电源 、 电路设计 电源在 x波段 宽带雷达 发射机运行过程 中有着决定性的
作用 。 首先, X 波 段 宽 带 雷达 发射 机 通 过 的 电压 、 电 流 非 常大 ,
大现实 意义 。x波段 宽带雷达发射机作为一种重要 的检测设
一
在 同一块 电路板中才能起到更好 的调制作用 。而功放 电路的 组成部分需要单独放在 一块 电路板 中。电源负责雷达统中的 电压的供应,而模拟 部分主要是对雷达系统 中的发射信号进 行滤波处理。当雷达探测好信 号时, 信号发送 端发 出信 号, 为
传感器信号调理电路PPT课件
测量放大器也叫仪表放大器、数据放大器
它对微小差模电压很敏感,适用于测量远 距离的小信号,适合与微小信号输出的传 感器配合使用。
2 测量放大器的电路原理
测量放大器构成
由两级放大器构成: Ui1
+
U3 R3 U5
R5
A1
-
1. 两个同相放大
R1
-
A3
UO
器A1、A2输
IG
RG
R2
+
入阻抗高。
2. 普通差动放大
+
U3 U 4 RG R1 R2
-
R4
R6
Ui1 Ui2
RG
A2
Ui2
+
U4
U0 U3 R5 R3
U5 U3
R3
U5
R6 R4 R6
U4
测量放大器原理电路
U0
U
4
R4
R6
R6
1
R5 R3
U3
R5 R3
2 测量放大器的电路原理
测量放大器的增益
K U0 U i1 U i2
Ui1
失调电压:当运放两输入为零时,输出端存在的 电压。
输入失调电压:运放输出端电压为零时,两个输 入端之间所加的补偿电压。
输入偏置电流:当运放的输出直流电压为零时, 其两输入端的偏置电流平均值。
输入失调电流:当运放的输出直流电压为零时, 其两输入端偏置电流的差值。
……
1 概述
运算放大器类型
通用型运算放大器:
反向输入
-
输出
同向输入
+
运算放大器
μA709很快地被随后而来的新产品μ A741取代, 741有着更好的性能,更为稳定,也更容易使 用。741运算放大器成了微电子工业发展历史 上一个独一无二的象征,历经了数十年的演 进仍然没有被取代,很多集成电路的制造商 至今仍然在生产741。
微波(雷达)感应模块原理调试
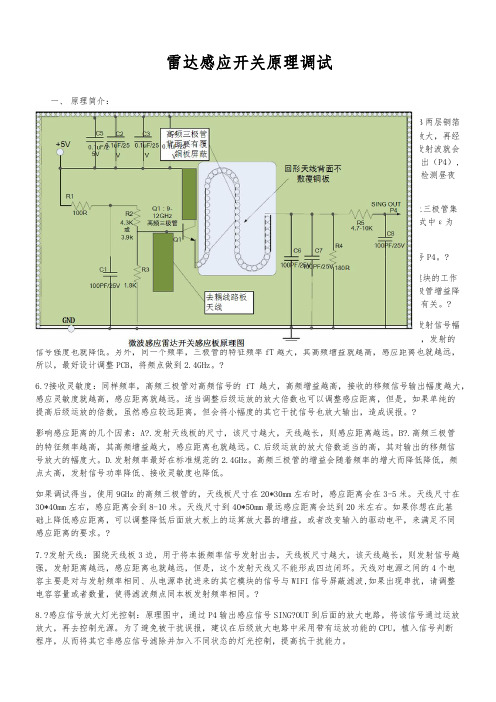
雷达感应开关原理调试一、原理简介:1.?主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。
发射的2.4-3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。
另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。
?2.?发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。
该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。
?3.?接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号?4.?发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。
一般的发射频率2.5GHz左右最佳,频率过高,则高频三极管增益降低,感应距离近。
发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。
?5.?发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及其发射信号幅度。
发射信号强度越大,感应距离越远。
但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。
另外,同一个频率,三极管的特征频率fT越大,其高频增益就越高,感应距离也就越远,?B?.高频三极管C.后级运放的放大倍数适当的高,其对输出的移频信2.4GHz。
信号调理电路

与传统无线电不同,软件无线电要求尽可能地以数字形式处理无线信号,因此必须将A/D和D/A转换器尽可 能地向天线端推移,这就对A/D和D/A转换器的性能提出了更高的要求。主要体现在两个方面。
(1)采样速率。依据采样定理,A/D转换器的抽样频率fs应大于2Wa(Wa为被采样信号的带宽)。在实际中, 由于A/D转换器件的非线性、量化噪声、失真及接收机噪声等因素的影响,一般选取fs>2.5Wa。
(2)分辨率。采样值的位数的选取需要满足一定的动态范围及数字部分处理精度的要求,一般分辨率80dB 的动态范围要求下不能低于12位。
谢谢观看
信号调理电路
把模拟信号变换为用于数据采集、控制过程、执行计算显示读出或 其他目的的数字信号的电路
01 简介
目录
02 信号调理
03 调理技术组成
04 信号滤波
05 信号隔离
06 模数转换
基本信息
信号调理电路(signal conditioning circuit)是指把模拟信号变换为用于数据采集、控制过程、执行计 算显示读出或其他目的的数字信号的电路。
某无人机飞控系统半实物仿真平台设计

2012年7月1日第35卷第13期现代电子技术Modern Electronics TechniqueJul.2012Vol.35No.13某无人机飞控系统半实物仿真平台设计薛 鹏,肖前贵,高艳辉(南京航空航天大学自动化学院,江苏南京 210016)摘 要:介绍了某型无人机飞控系统半实物仿真平台的总体功能,阐述了该平台的硬件选型原则、选型方案、基本功能及自制部件的设计过程,对各分系统仿真软件设计框架进行了描述。
最后,通过实际仿真对平台的设计功能进行了验证。
该平台也可用于对无人机飞行品质的仿真评估,以及无人机指挥操控人员的日常模拟训练。
关键词:无人机;飞行控制系统;半实物仿真;传感器仿真中图分类号:TN911.7-34;TP391.9 文献标识码:A 文章编号:1004-373X(2012)13-0111-04Design of hardware-in-the-loop simulation platform for a certain UAV flight control systemXUE Peng,XIAO Qian-gui,GAO Yan-hui(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)Abstract:The paper introduces a hardware-in-the-loop simulation platform of a certain UAV flight control system,illus-trates the selection principle,the selection scheme and functions of platform hardware and the design procedure of self-madecomponents,and describes framework of sub-system simulation software.Finally,the design functions of platform wereachieved and verified by systematic debugging and simulation.The platform can also be used to assess the UAV flight qualityand simulate the routine training for UAV operators.Keywords:UAV;flight control system;hardware-in-loop simulation;sensor simulation收稿日期:2012-02-220 引 言无人机作为模拟飞机类来袭目标,可为防空武器系统的火控雷达校飞、射击等任务提供空中靶标,是武器系统研制、鉴定过程中必不可少的装备[1]。
风廓线雷达信号处理机设计与实现

每 片 D P的存储器 接 口接有 18KX 2位 的同步 S 2 3
静态存储器(S A 和 4M× 2 SR M) 3 位的同步动态存储器 (D A , 6 S R M)2 个字的突发传输速率可达 34M / , 5 3 B s可
实现无缝 连接 。两 D P之 间还 接有 低 等 待 的 8KX 2 S 3 位双端 口 R M, 直接 进 行 数 据 交换 。通 过 板 内 P I A 可 C 接 口及 D P主机通道接 口( P ) S H I可实现两 SR M 之 间 SA 数 据 的直 接 存 取 ( MA) 或 者 将 某 个 S R M 的数 据 D 、 SA 传递 给另一 个 D P S。
CHEN HHa c .hu
( aj gR sac stt o lc ois eh o g , N nig2 0 1 ,C ia N ni eerhI tue f et nc c n l y a j 10 3 hn ) n ni E r T o n
【 btat T ed a D P+F G yt t c r o r a s n rcs r s r oe.T ef co n ei fh A s c】 h ul S r P A ss m su t e f a r i a poes o sd h n t nadds o te e r u a d gl o ip p u i n g
维普资讯
第2卷 8
第 5期
现 代 雷 达
M o en d r d r Ra a
V 1 2 No 5 o. 8 .
20 06年 5月
Ma 0 6 y 20
53
风 廓 线 雷达 信 号 处理 机 设 计 与 实现