比例阀控制非对称液压缸系统的非线性建模与仿真
基于Simulink的比例阀控液压缸的建模与仿真
基于Simulink的比例阀控液压缸的建模与仿真张兵;邓子龙【摘要】By improving the hydraulic system of the clamp experiment table to make it a closed-loop control system, and taking the system as the research object, the mathematical model and simulink simulation model are established. The dynamic performance in time and frequency domains is analyzed. Aiming at the improvement of the dynamic performance ofthe system, the damping ratioδh , the hydraulic cylinder frequency wh ,and the open loop gain Kc , of the close-loop control ing system, and their effect on the dy-namic performance of the system are analyzed by using MATLAB so as to provide reference for the design, calibration and optimiza-tion of the hydraulic system.%通过对夹具实验台液压系统进行改进,使其成为闭环控制系统并以此系统为研究对象,建立数学模型和Simulink仿真模型,分析了系统在时域和频域的动态性能。
从提高系统动态特性的角度出发,应用MATLAB分析了液压缸频率wh、阻尼比δh 和闭环控制系统开环增益Kc 对系统动态性能的影响,从而为液压系统的设计、校正、优化提供借鉴。
阀控缸建模方法的数字仿真比较

]:电极,则电极尺寸比所需要的尺寸小,通过电火花
放电加工后的模具尺寸相应偏小,丽产品尺寸也偏
小;只有通过方法三(“画出工件缩小余量值之后的
3D图形,再使用平底刀以。的余量直接加工”),加
工后的电极尺寸最为准确,通过电火花放电加工后的
模具尺寸也最为准确,相应的产品尺寸才准确,因此 推荐在实际的加工过程中,尽量使用这种方法。
E:兰集竽
砭——流量增益、m2/s:
(7)
C;(PI—p:)一C。p。】 式中:G。——流量系数,无因次;
(2d)
”——阀口面积梯度,“;
托——阀口开度,“;
P——液体密度,kg/m3;
卢,——系统的等效容积弹性系数,Pa;
见——供液压力,Pa;
p。——液压缸左腔压力,Pa;
p:——液压缸右腔压力,Pa;
编程时给刀具端部侧边增加一个R值,图6所 示,月的值为工件余量的绝对值,然后再指定工件负 的余最值,而实际使用没有端部侧边R角的相同直 径刀具进行加I:。
局部放大图
局部放大图
图8
图9
则加亡情况如图7及图8局部放大图所示,加工过程
中,刀具端部R与工件R面相切,只要工件的负余
量的绝对值不火于刀具的只值,则加工的结果就是
我们所需要的结果。然而,我们实际使用的刀具并不
存在端部的R,所以加工的实际情况不是上图8所示
的理想情况,而是如『翻9所示.川具底部的尖角切入
丁工件内,加工的帮体结果如图l()所示.外侧轮廓 线表示理想的工件外形,内N”E域
轮廓线表示实际加工出的工
件外形。,显而易见,实际加
工出的工件外形小于理想的
l:件外形,刀具切人工件内
应频率与振幅的关系曲
电液比例阀控液压缸系统建模与仿真

本 文搭 建 了 比例 阀控 非 对 称 液压 缸 控 制 系统 , 建 立 了该 系 统 的数 学 模 型 ,着 重 对 阀 控 非 对 称 液 压 缸 的建 模 方 法 进 行 了研 究 ,并 利 用 Maa tb中 的 l Smuik进行 仿真 分析 ,设 计 了 PD控制 器 对 系统 i l n I
进 行校 正 。Biblioteka 2 比例 阀控 液压 缸控 制系统 的数学模型
2 1 阀控非 对称 液压 缸的数 学模 型 .
1 系 统 的 组 成 及 原 理
比例 阀控 非 对 称 液 压 缸 控 制 系 统 的硬 件 组 成 如 图 1 示 ,主要 由滤 油 器 1和 6 所 、溢 流 阀 2、液
广泛 的应 用 。
液压 缸加 载指 定 负 载 (±2 ) 0t ,位 移传 感 器 将 液 压 缸 活 塞 的位 置 信 息 通 过 数 据 采 集 卡传 递 给计 算 机 与 理想 位 移 进行 比较 ,得 出差 值 ,经 过 优 化 处 理 和转 换 输 出控 制 信 号 ,通 过 比例放 大 器 放 大 后 驱 动 电液 比例 方 向 阀工 作 ,从 而 实 现对 液 压 缸 位 置 的精 确控 制 。
n l sswi t b a d c l rt st es s m v at e d sg e I o t l r h e ut h w a h y t m d l sc r ay i t Ma l n ai ae y t i h e in d P D c n r l .T er s l s o t t e s se mo e o — h a b h e oe s h t i r c ,a d h s hg e c u a y a d b t r s b l y atrt e c l r t n e t n a ih ra c r c n et t i t f h a i ai . e a i e b o
对称四通阀控非对称液压缸系统的建模与仿真

l P s - P L
2 01 5 . 0 9建设机械技术与管理 8 7
个节 流窗 口是 匹配 和对 称 的,供 油压 力 恒定 ,回油压 力 为零 。则可 建立 阀的线性 化流量方程 为 [ 4 ] :
q L =Kq x 一 K £ ( 5 )
一
q l + q 2
g l +g 2
在式 ( 7 )和 ( 8 ) 中,外 泄 露 流 量 C e p P 和C :
通 常 很小 ,可 以忽 略 妞果 压 缩 流 量 和
吼
一
( 6 ) - 2 v 亟 相 等 q d t … 一 l =2 u q 2。 。
以滑 阀为研 究 对 象 ,假 定 阀与液 压 缸 的连 接 管道
对 非对 称 液 压 缸 的分 析,建 立 了对 称 四通 阀控 制非对
P 一P
( 3 )
由式 ( 1 )~( 3 )可得 :
P , + 2  ̄ P L
( 4 )
称 液压 缸的数 学模 型 ,利用 MAT L AB中的 S i mu l i n k 工具包 建 立了系 统的仿真模 型 ,并结合 实际例子对其 动 态特性 进 行 了仿真分析 。
—
— -
:
2( ]  ̄ P 1 ) =
'
S
( 2 )
p S
Po
式中 : C d一 流量 系数 ; W一 阀的面积梯度 / m; P 油液密度 / ( k g / m 1 。 定义负载压 力 P L 为:
=
图1 对称 液 压 缸也 称为 单杆 活塞 缸 ,与对 称 液压 缸
豳长安大学 道路施 工技术与装备教 育部重点实验 室 刘 航/ L I U Ha n g 谢 东/ XI E D o n g 赵 ’  ̄/ Z HA O Wu
液压缸动力学特性的建模与仿真

液压缸动力学特性的建模与仿真液压缸是一种常见的执行元件,广泛应用于各类工业设备中。
在工程设计和优化过程中,了解液压缸的动力学特性对于提高其性能和可靠性至关重要。
本文将探讨液压缸动力学特性的建模与仿真方法。
液压缸的动力学特性是指其在工作过程中受到的力和力矩对速度、加速度和位移的影响。
建立液压缸的动力学模型可以帮助工程师更好地理解其运动规律,并据此进行优化设计。
基于这样的考虑,建模和仿真成为了研究液压缸动力学特性的重要手段。
在液压缸的建模过程中,最常用的方法是基于物理原理的方法。
这种方法通过对液压缸内部液体流动、活塞运动和密封摩擦等因素的分析,建立数学方程描述液压缸的动力学行为。
其中,液体流动方程、动量守恒方程和力矩平衡方程是建立液压缸动力学模型的重要基础。
此外,还需要考虑活塞与缸体之间的摩擦力和液压系统的非理想性等因素。
建立液压缸动力学模型的另一个重要问题是选择适当的仿真工具。
目前,常用的仿真软件有MATLAB/Simulink、LabVIEW和AMESim等。
这些软件具有强大的仿真功能和友好的用户界面,可以同时模拟液压系统和液压缸的动力学行为。
通过这些仿真工具,工程师可以直观地观察液压缸的运动轨迹、力矩曲线和速度变化等,从而优化设计方案。
除了基于物理原理的建模方法,还有基于系统辨识的方法可以用于液压缸的动力学建模。
系统辨识是一种通过实验数据来估计系统的数学模型的方法。
在液压缸建模中,可以通过对其施加不同的输入信号,并记录输出信号的变化来进行系统辨识。
常用的系统辨识方法有ARX模型、ARMAX模型和State Space模型等。
通过系统辨识可以获得更加准确的液压缸动力学模型,进而进行仿真和优化设计。
液压缸动力学特性的仿真研究不仅有助于优化设计,还可以用于故障诊断和故障预测。
通过对液压缸的模拟仿真,可以分析其在不同工况下的性能变化,并预测潜在故障的出现。
这对于维护人员来说是非常有价值的,可以提前采取相应的维护措施,避免设备故障对生产过程造成影响。
基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真
义的 pL 和 Q L 对非对称和对称动力机构均适 用, 具有 普遍意义。
1 2 2 液压缸负载流量方程的推导
( 1) 比例阀的流量方程
如图 2所示, 假设回 油压力 p0 = 0, 则比例 阀左 右两腔的流量方程为
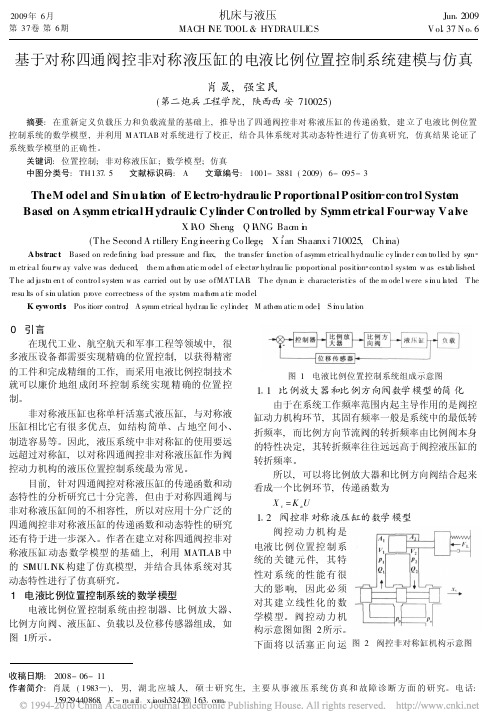
1 电液比例位置控制系统的数学模型 电液比例位置 控制系 统由控 制器、比 例放 大器、
比例方向阀、液压缸、负载以及位移传感器组成, 如 图 1所示。
图 1 电液比例位置控制系统组成示意图
1 1 比例放大器和比例方向阀数学模型的简化 由于在系统工作频率范围内起主导作用的是阀控
缸动力机构环节, 其固有频率一般是系统中的最低转 折频率, 而比例方向节流阀的转折频率由比例阀本身 的特性决定, 其转折频率往往远远高于阀控液压缸的 转折频率。
96
机床与液压
第 37卷
动 (即 y > 0) 的情形 为例 进行分 析建模, 活塞负 向 运动的情形可依此类推。
1 2 1 pL 和 Q L 的重新定义 负载压力 pL 和负载流量 QL 是液压动力机 构特性
研究和系统优化设计的基础。目前对阀控非对称液压
缸的 pL 和 QL 的定义通常采用 2种形式: 一种 是沿用 对称情况下的定 义, pL = p1 - p2, QL = (Q 1 + Q2 ) /2; 另一种定义是 pL = p1 - p2, QL = (Q 1 + Q 2 ) / 2, 其中
力系数,
kc =
1 2
∀xv
pp - pL。
pp - pL;
kc 为 流量 压
1 2 3 阀控缸机构的基本方程
阀控非对称缸位置系统的非线性建模

式 中 : 一Vd / v为液 压 弹 性模 量 , m2 V 为 = pd N/ ; 液压 缸腔 总容 积 , ; 为 无 杆 腔 容 积 , ; m3 V1 m3 V2为 有杆 腔容 积 , ; i 内泄 流量 , / ; m3 QL 为 m。s Qg 为外泄
【 d X  ̄2P —P )l z < 0 一C W / ( s 2/ , D
式中 : Q1为 Pl腔 流 量 , /; m s Q2为 P2腔 流 量 ,
m3s Cd 流量 系数 ; 2 /; 为 7 为节 流窗 口面积梯 度 , p X m; 为 液体 密度 ,g m3z k / ; 为 阀芯位 移 , 定义 向右 为 m, 正 方 向. 2 液 压缸 连续 性方 程为 )
压缸 活塞 所受 外干 扰力 .
为 了方便 系统 原理性 方程 的建 立 , 如下 假设 : 做
① 4个 节流 窗 口是 匹配而且 对 称 的 ; 节 流窗 口处 ② 的流 动为 紊流 , 液体 压缩 性 的影 响在 阀中予 以忽 略 ; ③ 每个 相应工 作 腔 的各 点压 力相 同 , 液温 度 和容 油 积弹性模 数 可 以认 为 是 常 数 ; 油 源 供 油 压 力 恒 ④ 定 , 回油 压力 为零 . 且 由于伺服 阀与 液压 缸之 间连接
免 了分段带来 的问题 , 型 中参 量 均 为 实 际物理 量 , 模
j d  ̄2P —P )P ≥ 0 /( s 1/, c
l C w  ̄2P1一P )p, < 0 ,、 dx /( T/ z
阀控非对称液压缸建模方法研究

PL F = =
=
P一 l
() 2
( )当活塞 反 向缩 回(< 0 时 , 2 y ) 负载 压 力 为
PL =A
,
=
A
,
= z 一 n
I
() 3 、
n=A: A。 液 压 缸 有 杆 腔 面 积 和 无 杆 腔 面 积 / 为
之 比。
阀控液压 缸系统 ,是工程上应用 比较广泛的传
动 和 动力 系 统 。其 中 , 阀控 对 称 缸 系统 与 阀控 非 对称 缸 相 比 , 有 很 好 的 控 制特 性 , 实 际 生 产 中得 到 了 具 在
F——活塞杆伸 出的外负载 , N; P、 2 — 液 压 缸无 杆 腔 、 杆 腔 的 有压 力 ,a l — P 有 P; ,、 — — 液 压 缸 无 杆 腔 、 杆 腔 的 有 效 工作 面 有
和 阀控 对 称 液 压 缸 的 数 学模 型 , 阀 控 缸 系统 的静 动 态 特 性 分 析 提 供 了理 论基 础 。 为
关键词 : 阀控非对称 液压缸 ; 负载压 力; 负载流 量 ; 学模 型 数 中图分类号 : H1 75 T 3 . 文献标识码 : A 文章编号 : 6 2 5 5 2 1 】3 0 0 — 4 1 7 — 4 X( 0 10 - 0 9 0
假定 : 阀与液 压 缸 的连 接 管 道 对称 且 短 而粗 , 管 道 中的 压力 损 失 和 管道 动 态 可 以忽 略 ;液压 缸 每 个 工 作 腔 内各 处 压 力 相等 ,油 温 和体 积 弹 性模 量 为 常 数 ; 压缸 内外 泄 漏均 为层 流 流动 。 液 () 1当活 塞正 向伸 出 (> 0 时 , y ) 流人 液 压缸 进 油
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本 文 以 电液位 置 控 制 系统 为 研 究 对 象 , 首 先建 立
在式( 1 )~ 式( 3 ) 中, 消去 中 间变 量 Q 和Q , 以 阀 芯位移 为输 入 , 以两腔 压力 P 。 、 P 以及 活塞杆 的位 移 Y和速度 Y为状 态变量 , 在 MA T L A B中编 辑 S - F u n c t i o n 便 可得 到 阀芯正 向移动 时 的阀控缸 模型 。 同样 阀芯 负 向移动 的模 型可 根据式 ( 4 )~式 ( 6 ) 得到, 两 者 可通 过
控 非对 称缸 整个 闭环 系统 的仿 真分 析 , 为 系统 的设计 提供 指 导 。 关键 词 : 比例 阀 ; 非对 称缸 ; 非 线性模 型 : 仿 真 中 图分类 号 : T H1 3 7 文 献标 志码 : B 文章 编号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 0 4 - 0 0 2 5 - 0 5 引言
称会 不会 超 出额 定流 量 , 这 些疑 问都 使 考查 系统的 中间状 态显得 非 常重要 。 签 于此 , 该 文建 立 了阀控 非 对称 缸 的非 线性微 分 方程 模型 , 同时在 A ME S i m 液 压仿 真软 件 中建 立 了相 同的模 型 以进 行 对 比验 证 , 最后 进行 阀
差 分析 , 很难 把握 系统 的 中间状 态( 如 液压缸 两腔压 力和 流 量的 变化 ) 。 而直接 以物理 微 分 方程 建 立起 的 阀 控缸 非 线性模 型 可 方便 地 进行 数值 仿 真分 析 , 从 而 对 系统 的 中间状 态有 直接认 识 。 当采 用 对称 阀控 制 非对
的开 环和 闭环 传递 函数 。这 种方 法对 分 析 系统 的稳定 性 和稳 态 误差 非常 有效 , 但 对一 些 中间变 量 , 如液 压缸
两缸压 力 、 流量 的变化难 以把握 。另 外 , 当采用 对 称 阀 控制 非对 称缸 时 , 其 负载 压 力 和 负 载 流 量 的 定 义 又存 在较 多 的差 异 _ 2 J , 不 利 于传 递 函数 的求 取 。此 外 , 由 于非对 称 液压 缸两 腔 作 用 面积 不 等 , 故 阀 芯在 方 向切 换 时会 使 两腔 压力 产 生 突 变 , 压 力 的突 变会 不会 产 生
电液 比例控 制 系统 一 般 由 P I D控 制 器 、 功 率 放 大 器、 电液 比例方 向 阀 、 液压 泵 、 液压缸、 负载、 传 感 器 等 组成 , 图1 所示 为 典型 的 电液 比例位 置控 制 系统 ¨ ] , 它
可 用于 车辆 的助 力转 向 、 后轮 主动 转 向及 油气悬 架 。
ZHENG Ka i — f e ng,CHEN S i — z h o n g
( 北京理工 大学 机械 与车辆学院 , 北京
1 0 0 0 8 1 )
摘 要 : 电液 比例 阀控 制 液压 缸 组成 的 闭环 系统 多以传 递 函数 的形 式进 行 系统 的稳 定性 分 析 和稳 态误
收稿 日期 : 2 0 1 2 — 1 0 — 1 7
作 者简介 : 郑 凯锋 ( 1 9 8 3 一) , 男, 陕西 宝鸡 人 , 博 士生 , 主 要 从 事 车 辆 主 动 转 向研 究 工作 。
图 中位 置控 制 系统采 用 定量 泵和 溢流 阀组 成定 压 供 油单 元 , 位移传 感 器 检 测 出 活塞 杆 的实 际位 移 并 将
图1 电 液 比例 位 置 控 制 系统
气蚀 或超 压 , 而流 量 的变化 是不 是在 额 定范 围 内 , 都不 能 以传递 函数 的形 式 表 现 出来 。相 反 , 以阀 控 非对 称
液压 缸 的非线 性微 分方 程模 型及 其 数值 仿真 分析 可 以 得到 两腔 压力 和流 量 变 化 时 域 特 性 叫J , 从 而更 全 面 地把 握整 个 系统 的 响应特性 。
的进 出油 量 , 进而 实现 对活 塞杆 的位 移控 制 。 针对 上述 的闭环 控 制 系 统 , 可 以通 过 引 人 负 载压 力和 负载 流量 , 将 流量 方 程 进 行 适 当简 化并 作 线 性 化 处理 得 到 阀控 缸 的传 递 函数模 型 , 进 而 得 出 整个 系统
2 0 1 3年 第 4期
液 压 与 气动
2 5
比例 阀 控 制 非 对 称 液 压 缸 系 统 的 非 线 性 建 模 与 仿 真
郑 凯 锋 ,陈 思 忠
Mo d e l i n g a n d S i mu l a t i o n o n t h e C l o s e — l o o p S y s t e m o f P r o p o r t i o n a l Va l v e Co n t r o l l e d As y mme t r i c a l Hy d r a u l i c C y l i n d e r
其 转换 成 电压信 号 , 与 给 定 的 预 期 位移 电压 信 号 比较
得 出偏 差量 , P I D 控 制 器便 根 据 此 偏 差 量 得 出控 制 电
压值 , 功率 放大 器则 将 得 到 的控 制 电压 放 大 并 以 电流
形式 输 出用 于驱 动 比例 电磁 铁 , 比例 电磁 铁 得 电后 产 生 一定 的输 出力 推 动 阀 芯移 动 , 从 而调 节 液 压 缸 两 腔
称缸 时 , 因液压缸 两腔 的作 用面积 不 等 , 使 活塞在 方向切 换 时导致 液 压缸 两腔 压 力 的 突 变 , 同 时流 量在 两 个
运 动方 向上 的不 对称 也会 引起 活 塞杆位 移 和速度 的不一 致 , 压 力的 突 变会 不会 产 生超 压或 气蚀 , 流 量的 不对