阀控非对称液压缸建模方法研究
对称阀控制非对称缸电液伺服系统建模分析
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
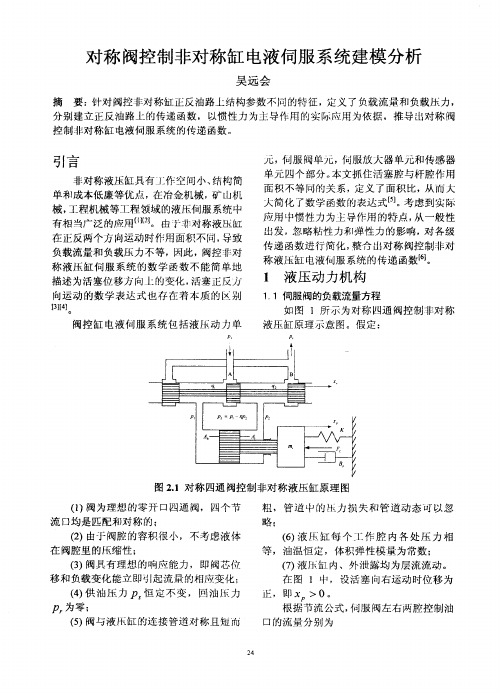
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
基于SIMULINK的阀控非对称液压缸系统的研究

中图分类号:THl37.8
文献标识码:A
文章编号:1672—8904(2008}01—0003-003
1引 言
在现代化工业生产中,非对称液压缸具有占用 空间小、加工密封简单、制造成本低等的优点,因而 在一些精度要求不太高的场合得到了广泛的应用。 笔者在建立阀控非对称液压缸的数学模型的基础 上,引入了闭环PID位置控制,并利用MATLAB中 的SIMULINK模块库仿真与分析研究其控制性能。
效作用面积之差导致了液压缸活塞杆外伸与内缩
时一些参数的改变,因此,应分别对液压缸活塞杆
外伸与内缩进行分析研究(本文仅以活塞杆外伸为
例进行了仿真分析,有关活塞杆内缩的情况读者可 根据下述方法自行设计仿真,在此不再赘述)。在这
一液压伺服系统中,我们尝试从阀的负载压力一流
量特性、油缸负载流量方程和液压缸的力方程三方
综上所述的结论,搭建系统的SIMULINK模型 如图4所示。由于系统外负载力为不定参量,所以 可用随机模块来表示。为了能更好地说明系统的准 确性,系统仿真过程中分别使用了正弦信号、阶跃 信号以及方波信号作为系统的输入信号来进行系 统的仿真,其仿真结果如图5、图6、×104
控
图3阀控非对称液压缸控制系统方框图
4仿真
‘。 ‘。~i根据式(4)所得公式代入表(1)所示数据并经
整理得:
Y—.
1.66x106
U
s3+8.23s2+9604s
Y
一0.00083s一0.0067
凡
s3+8.2382+9604s
本文中,我们采用的是增量式PID控制器。在
设计该控制器的过程中,我们对控制器的比例系数 K,,积分系数Ki以及微分系数Kd进行了调节,从 而提高了系统的稳定性、响应速度、超调量以及稳 态精度。在研究过程中,我们采用试凑法选取了 Kp=0.020、Ki=O.003以及Kd=O.00 1。
长行程阀控非对称缸建模分析

第1 ( 期 总第 2 期 ) 0
20 0 7年 1 月
赢体钴动 控副
Fu d o rTrn m/so n nt l li P we a s sin a d Co r o
No1Sr lN .0 . ei o ) ( a 2
J n,0 7 a. 0 2
长 行 程 阀控 非对 称 缸 建模 分 析
肖志权 邢继 峰 朱石 坚
湖北武汉 403 ) 30 3
(海军工程大学船 舶与动力学 院
摘要 : 考虑缸压 缩性 流量并重新定义负载流量和负载压力 的基础上 , 在 建立 了长行程 阀控非对 称缸数学模 型 , 包含 正、 反两个方 向的表达式。模型中引入的等 效容积 函数是缸两腔等效容积 ( 或活塞位置 ) 的函数 , 映活塞 在长 行程 反 中不 同位置对阀控缸 性能的影 响。分析 了新模型 的意义以及对于研究长行程 阀控非对称缸 的动态特性 的作用。最
能带来功率不匹配及输 出力定义等问题【 在两个 羽,
收稿 日期 :0 6 0 — 8 20 — 9 2
方 向上 重新 定义 负载 流量 g 和 负载 压力 P 为
作者简介 : 肖志权 , 在站博士后。
维普资讯
2 0
’
赢体钴劲 控副
,
27 第1 0年 期 0
A 2
正 向 -O q-  ̄ I 1 ——p 18 2 ,rq , 一 p 2 —p
A1 A 1 A 2 1
() 1
反 向 < ,Lq ,I 2 O q- 2 一——p: 一 — 1 p 1 — p 2
£
() 2
中间位置不一定是最危险位置 ) ,因此时考虑上述
前
电液比例阀控液压缸系统建模与仿真

本 文搭 建 了 比例 阀控 非 对 称 液压 缸 控 制 系统 , 建 立 了该 系 统 的数 学 模 型 ,着 重 对 阀 控 非 对 称 液 压 缸 的建 模 方 法 进 行 了研 究 ,并 利 用 Maa tb中 的 l Smuik进行 仿真 分析 ,设 计 了 PD控制 器 对 系统 i l n I
进 行校 正 。Biblioteka 2 比例 阀控 液压 缸控 制系统 的数学模型
2 1 阀控非 对称 液压 缸的数 学模 型 .
1 系 统 的 组 成 及 原 理
比例 阀控 非 对 称 液 压 缸 控 制 系 统 的硬 件 组 成 如 图 1 示 ,主要 由滤 油 器 1和 6 所 、溢 流 阀 2、液
广泛 的应 用 。
液压 缸加 载指 定 负 载 (±2 ) 0t ,位 移传 感 器 将 液 压 缸 活 塞 的位 置 信 息 通 过 数 据 采 集 卡传 递 给计 算 机 与 理想 位 移 进行 比较 ,得 出差 值 ,经 过 优 化 处 理 和转 换 输 出控 制 信 号 ,通 过 比例放 大 器 放 大 后 驱 动 电液 比例 方 向 阀工 作 ,从 而 实 现对 液 压 缸 位 置 的精 确控 制 。
n l sswi t b a d c l rt st es s m v at e d sg e I o t l r h e ut h w a h y t m d l sc r ay i t Ma l n ai ae y t i h e in d P D c n r l .T er s l s o t t e s se mo e o — h a b h e oe s h t i r c ,a d h s hg e c u a y a d b t r s b l y atrt e c l r t n e t n a ih ra c r c n et t i t f h a i ai . e a i e b o
对称四通阀控非对称液压缸系统的建模与仿真

l P s - P L
2 01 5 . 0 9建设机械技术与管理 8 7
个节 流窗 口是 匹配 和对 称 的,供 油压 力 恒定 ,回油压 力 为零 。则可 建立 阀的线性 化流量方程 为 [ 4 ] :
q L =Kq x 一 K £ ( 5 )
一
q l + q 2
g l +g 2
在式 ( 7 )和 ( 8 ) 中,外 泄 露 流 量 C e p P 和C :
通 常 很小 ,可 以忽 略 妞果 压 缩 流 量 和
吼
一
( 6 ) - 2 v 亟 相 等 q d t … 一 l =2 u q 2。 。
以滑 阀为研 究 对 象 ,假 定 阀与液 压 缸 的连 接 管道
对 非对 称 液 压 缸 的分 析,建 立 了对 称 四通 阀控 制非对
P 一P
( 3 )
由式 ( 1 )~( 3 )可得 :
P , + 2  ̄ P L
( 4 )
称 液压 缸的数 学模 型 ,利用 MAT L AB中的 S i mu l i n k 工具包 建 立了系 统的仿真模 型 ,并结合 实际例子对其 动 态特性 进 行 了仿真分析 。
—
— -
:
2( ]  ̄ P 1 ) =
'
S
( 2 )
p S
Po
式中 : C d一 流量 系数 ; W一 阀的面积梯度 / m; P 油液密度 / ( k g / m 1 。 定义负载压 力 P L 为:
=
图1 对称 液 压 缸也 称为 单杆 活塞 缸 ,与对 称 液压 缸
豳长安大学 道路施 工技术与装备教 育部重点实验 室 刘 航/ L I U Ha n g 谢 东/ XI E D o n g 赵 ’  ̄/ Z HA O Wu
液压缸的动力学建模与控制策略研究

液压缸的动力学建模与控制策略研究液压冲压机是现代制造业中常见的一种设备,它通过液压缸的动作来实现金属工件的压制和成型,广泛应用于汽车、航空航天、家用电器等领域。
液压缸的动力学建模及控制策略的研究对冲压机的精度和效率提升至关重要。
在液压冲压机中,液压缸是一个关键的执行器,其动力学特性直接影响了冲压过程的效果。
液压缸的动力学建模是研究液压冲压机控制策略的基础。
首先,我们需要了解液压缸的基本结构和工作原理。
液压缸主要由活塞、缸体和密封元件组成。
当液压油通过控制阀进入液压缸时,活塞在液压力的作用下进行往复运动,从而实现冲压过程。
液压缸的动力学建模是通过数学模型来描述液压缸的运动学和动力学特性。
一般来说,液压缸的运动学模型可以分为位移-时间模型和速度-时间模型。
位移-时间模型描述了液压缸的位移随时间的变化规律,是动力学建模的基础。
速度-时间模型则描述了液压缸的速度随时间的变化规律,可以用来优化控制策略。
在液压冲压机中,液压缸的动力学建模是一个复杂的过程。
首先,我们需要考虑液压缸的非线性特性。
液压缸的运动受到摩擦力、液压缸本身的质量分布以及液压油的压力和流量等多个因素的影响,这些因素使得液压缸的动力学特性呈现出非线性行为。
其次,液压冲压机中的冲压过程通常存在着突变、冲击等非光滑现象,这也增加了液压缸的动力学建模的难度。
针对液压冲压机的动力学建模难题,研究者们提出了许多方法和算法。
例如,可以利用系统辨识的方法来确定液压缸的非线性特性参数,从而建立准确的动力学模型。
另外,也可以采用基于物理的建模方法,通过对液压缸内部的流体力学和结构力学进行建模,来预测液压缸的运动学和动力学特性。
除了动力学建模,液压冲压机的控制策略也是一个重要的研究方向。
传统的液压冲压机控制策略主要依靠PID控制器来调节液压缸的运动。
然而,传统的PID控制器在面对非线性、时变的系统时效果有限。
因此,研究者们提出了许多先进的控制策略,如模糊控制、神经网络控制、自适应控制等,来提高液压冲压机的控制精度和稳定性。
阀控非对称缸位置系统的非线性建模

式 中 : 一Vd / v为液 压 弹 性模 量 , m2 V 为 = pd N/ ; 液压 缸腔 总容 积 , ; 为 无 杆 腔 容 积 , ; m3 V1 m3 V2为 有杆 腔容 积 , ; i 内泄 流量 , / ; m3 QL 为 m。s Qg 为外泄
【 d X  ̄2P —P )l z < 0 一C W / ( s 2/ , D
式中 : Q1为 Pl腔 流 量 , /; m s Q2为 P2腔 流 量 ,
m3s Cd 流量 系数 ; 2 /; 为 7 为节 流窗 口面积梯 度 , p X m; 为 液体 密度 ,g m3z k / ; 为 阀芯位 移 , 定义 向右 为 m, 正 方 向. 2 液 压缸 连续 性方 程为 )
压缸 活塞 所受 外干 扰力 .
为 了方便 系统 原理性 方程 的建 立 , 如下 假设 : 做
① 4个 节流 窗 口是 匹配而且 对 称 的 ; 节 流窗 口处 ② 的流 动为 紊流 , 液体 压缩 性 的影 响在 阀中予 以忽 略 ; ③ 每个 相应工 作 腔 的各 点压 力相 同 , 液温 度 和容 油 积弹性模 数 可 以认 为 是 常 数 ; 油 源 供 油 压 力 恒 ④ 定 , 回油 压力 为零 . 且 由于伺服 阀与 液压 缸之 间连接
免 了分段带来 的问题 , 型 中参 量 均 为 实 际物理 量 , 模
j d  ̄2P —P )P ≥ 0 /( s 1/, c
l C w  ̄2P1一P )p, < 0 ,、 dx /( T/ z
非对称缸系统精确建模方法研究

非对称缸系统精确建模方法研究赵周礼1,周恩涛1,周士昌1,李 文2,王少丹2(1 东北大学机械工程与自动化学院,辽宁沈阳110004;2 宝钢股份公司设备部)摘要:本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,仿真结果表明该模型精确有效。
关键词:非对称缸系统;状态方程;建模0 引言由于非对称液压缸占用空间小,加工、密封比较简单,制造成本也较低廉等优点,因此在液压伺服系统中被广泛地采用。
但是,非对称液压缸两腔的作用面积不等,正是结构上的非对称性导致该系统正反两个方向上的动、静态特性不相同,相应的数学模型也不相同。
为了建立非对称缸系统的数学模型,常规的做法是对系统的一些环节作了简化,建立了近似的传递函数数学模型[1][2]。
文献[3]针对液压缸活塞杆正反两个运动方向,采用分别建模的方法,建立相对准确的数学模型,但给系统仿真带来一些困难。
本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,并利用四阶龙门库达法求解该微分方程,仿真结果表明该模型精确有效。
1 电液比例阀2 压力传感器3 位移传感器4 伺服液压缸5 侧导板6 卷筒图1 助卷辊电液伺服系统示意图1 系统结构介绍图1为某卷取机助卷辊电液伺服系统的示意图。
助卷辊的各种工作方式是依靠电液伺服系统来实现。
图中简单画出三个液压缸的示意图。
文中只建立1号助卷辊伺服系统的数学模型,其它可类推。
图2为阀控液压缸的原理图,图中液压阀线圈被加上正向电流,伺服液压缸向正向运动。
图2中y p 表示活塞杆的位移,B c 为活塞的粘性阻尼系数,F L 为外干扰力,m P 表示液压缸运动部件的质量,m L 表示负载惯量折算到活塞处的等效质量,A 1为液压缸无杆腔的有效面积,A 2为液压缸有杆腔的有效面积,Q 1,Q 2为流入和流出液压缸两腔的流量,p s 为供油压力,p 1、p 2为液压缸两腔的压力,p 0为回油压力,x v 为滑阀阀芯位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PL F = =
=
P一 l
() 2
( )当活塞 反 向缩 回(< 0 时 , 2 y ) 负载 压 力 为
PL =A
,
=
A
,
= z 一 n
I
() 3 、
n=A: A。 液 压 缸 有 杆 腔 面 积 和 无 杆 腔 面 积 / 为
之 比。
阀控液压 缸系统 ,是工程上应用 比较广泛的传
动 和 动力 系 统 。其 中 , 阀控 对 称 缸 系统 与 阀控 非 对称 缸 相 比 , 有 很 好 的 控 制特 性 , 实 际 生 产 中得 到 了 具 在
F——活塞杆伸 出的外负载 , N; P、 2 — 液 压 缸无 杆 腔 、 杆 腔 的 有压 力 ,a l — P 有 P; ,、 — — 液 压 缸 无 杆 腔 、 杆 腔 的 有 效 工作 面 有
和 阀控 对 称 液 压 缸 的 数 学模 型 , 阀 控 缸 系统 的静 动 态 特 性 分 析 提 供 了理 论基 础 。 为
关键词 : 阀控非对称 液压缸 ; 负载压 力; 负载流 量 ; 学模 型 数 中图分类号 : H1 75 T 3 . 文献标识码 : A 文章编号 : 6 2 5 5 2 1 】3 0 0 — 4 1 7 — 4 X( 0 10 - 0 9 0
假定 : 阀与液 压 缸 的连 接 管 道 对称 且 短 而粗 , 管 道 中的 压力 损 失 和 管道 动 态 可 以忽 略 ;液压 缸 每 个 工 作 腔 内各 处 压 力 相等 ,油 温 和体 积 弹 性模 量 为 常 数 ; 压缸 内外 泄 漏均 为层 流 流动 。 液 () 1当活 塞正 向伸 出 (> 0 时 , y ) 流人 液 压缸 进 油
g =q L 1 ( 9)
qcP 一 2 + () 2咖l P =( 一 警 1 7
大量文献 中【 仍 沿用 阀控对称 缸 系统的数学模 型 一,
和部 分 参 数 的 定 义 方式 ,对 阀控 缸 系 统 性 能 的 分 析 和控 制 造 成 了 一 定 的影 响 。本 文 重 新 定 义 了 负 载 压 力 与 负 载 流 量 ,而且 对 阀控 非 对 称 缸 系 统建 立 了数
积 , m;
广泛的应用。但 由于对称缸加工难度大 、 滑动摩擦 阻 力 较 大 、需 要 的运 行 空 间 也 大 ,而非 对 称 缸 构 造 简
且 有 Al A2 > 。
单, 制造容易 , 单边滑 动密 封的效 率及可靠 性高 , 工 因 为液 压 缸 两 腔 的 工作 面 积不 等 ,所 以定 义 负 作 空 间小 。近 年来 , 控非 对称 缸 系 统在 工 程应 用 中 载 压力 如 下 : 阀 的地 位 日益 显 现 。然 而 , 分析 阀控非 对 称 缸 系统 的 在 ( )当活 塞正 向伸 出( > 0 时 , 载压 力 为 1 y ) 负
面 积梯 度 加 以改 变 , 里 的推 导方 法 仍 然适 用 。 这 ( )当活塞 正 向伸 出( > O 时 阀芯 右移 , 1 . y ) 即 > 0则 滑 阀两 腔 的流 量 方 程为 : ,
蝴
1 负 载压 力 P L的重 新定义
在 阀控 非 对 称 液 压 缸 中 ,以活 塞 杆 的伸 出运 动
由式 ( ) 4 和式 ( ) 可得 5,
=
 ̄ =… / 矗
㈦
() 7
c
+Ce P + 1 p
+
)
从 液 压缸 回油腔 流 出 的流量 q 为
液压缸的输 出功率 Ⅳ n为
Ⅳ q —P 吡: l 2 g
由式 ( ) 6 和式 ( )可得 7, , 1。 g =( 一 v =尸 g 一 0 故可 定 义负载 流 量 为
可 誓
 ̄ A2 Y - d .
( 4 )
() 5
为例 , 根据活塞的受力分析 , 图 1 如 所示 , 可得 : P ・ 一P : 1A。 2A =F () 1
式中 ,
式 中,
q — — 无杆 腔 的流 量 , /; ma s
收稿 日期 :0 0 0 — 4 2 1-30 作者 简介 : 民( 9 4 )男 , 强宝 16 一 , 陕西礼 泉人 , 教授 , 主要从事 液压 系统仿 真和 故障诊 断方 面的研 究 ; 刘保 杰 ( 9 5 )男 , 徽阜 1 8一 , 安 阳人 , 究 生。 研
2 负载流 量 q 的重 新定义
假定 : 零开 口四边滑 阀的 4个节流窗 口, 匹配 是 和对称 的, 供油压力 恒定 , 回油压力 为零。实际 中 所研 究 的 阀 多 为非 对 称 阀 ,只需 将 下 面 公 式 中 的
图 1 阀 控 非 对 称 液 压 缸 动 力 机 构 原 理 图
腔 的 流量 q 为 。
J — —无 杆 腔 的压力 , a P l P;
P— — 有杆 腔 的压力 ,a 2 V;
— —
电液 比例 方 向阀的 流量 系数 ;
o—— 电液 比例方向阀的面积梯度 , . 1 m;
— —
电液比例方 向阀的阀芯位移 , m;
P——液压油 的密度 ,g 3 k/ 。 m
《 装备制造技术 >O 1 2 l 年第 3 期
阀控 非 对 称 液压 缸 建 模 方 法 研 究
强宝民, 刘保 杰
( 第二炮兵工程学院 , 陕西 西安 7 0 2 ) 10 5
摘 要 : 阀控非对称 液压缸特 性 出发 , 负载压 力和 负载 流量进行 了重新 定义 。 从 对 并推 导 出适 用 于阀控 非对 称液压 缸
9
Eq i me t u p n Ma ua t n e h oo y No3, 0 n fc r g T c n lg . 2 1 i 1
q— —有 杆腔 的流量 , 3 ; 2 m/ s
— —
液 压 油源 的压 力 ,a P;
3 非 对 称 液 压 缸 的 流 量 连 续 方 程