对称滑阀控制非对称液压缸系统传递函数的求解
对称阀控制非对称缸电液伺服系统建模分析
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
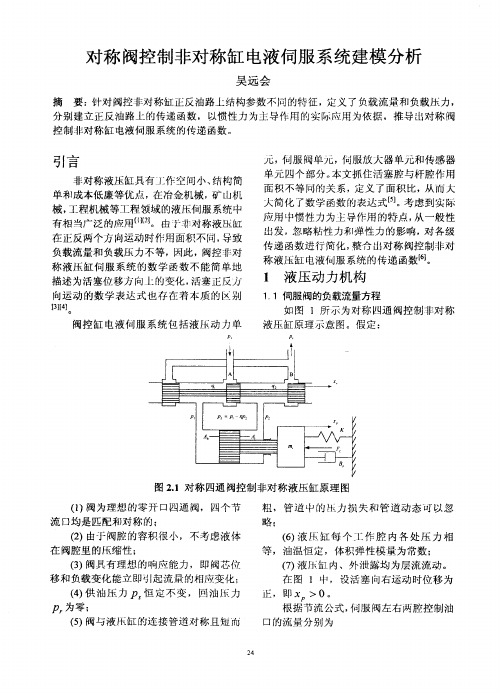
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真
N L = pLQL = (p1 - p2 ) (Q1 + Q 2 ) /2
( 2)
设液压缸的输出功率 N c 为
N c= FLv
( 3)
式中: FL 为液压缸负载, F L = A 1p1 - A2 p2;
v为液压缸活塞的运动速度, v = Q1 /A1 = Q2 /A2。 令 N = N c - N L, 由式 ( 1)、 ( 2 )、 ( 3) 可得
所以, 可以将比例放大器和比例方向阀结合起来 看成一个比例环节, 传递函数为
X v = K aU 1 2 阀控非对称液压缸的数学模型
阀控动力机构是
电液 比 例 位置 控 制 系 统的 关 键 元 件, 其 特 性对 系 统 的性 能 有 很 大的 影 响, 因 此 必 须 对其 建 立 线性 化 的 数 学模 型。 阀 控 动 力 机 构示意图如图 2所示。 下面 将 以 活塞 正 向 运 图 2 阀控非对称缸机构示意图
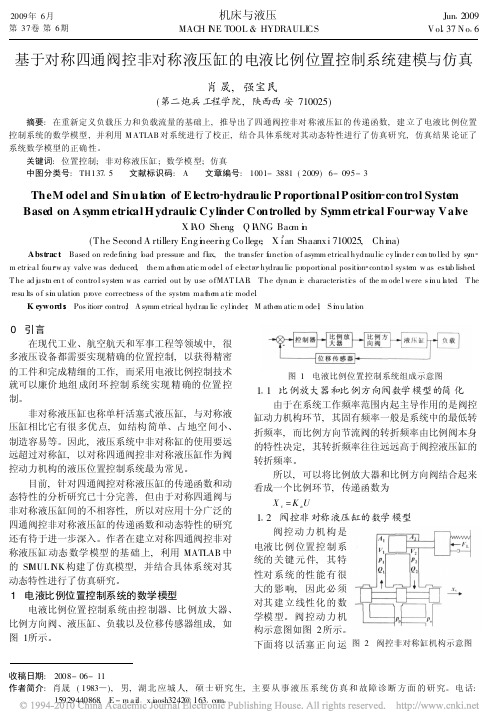
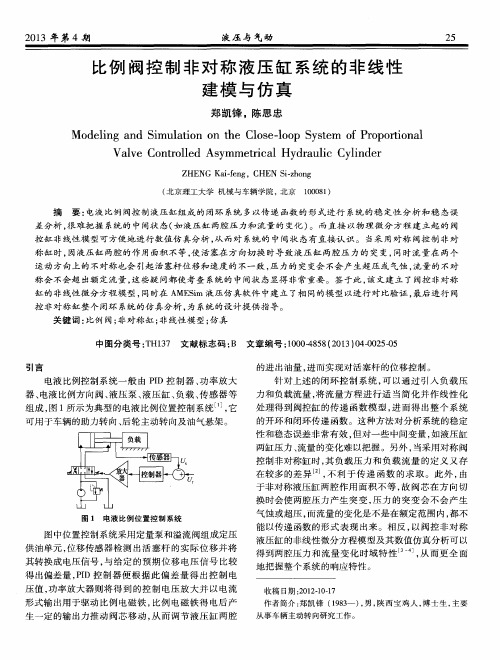
1 电液比例位置控制系统的数学模型 电液比例位置 控制系 统由控 制器、比 例放 大器、
比例方向阀、液压缸、负载以及位移传感器组成, 如 图 1所示。
图 1 电液比例位置控制系统组成示意图
1 1 比例放大器和比例方向阀数学模型的简化 由于在系统工作频率范围内起主导作用的是阀控
缸动力机构环节, 其固有频率一般是系统中的最低转 折频率, 而比例方向节流阀的转折频率由比例阀本身 的特性决定, 其转折频率往往远远高于阀控液压缸的 转折频率。
对称比例方向阀控制非对称缸在矫直机辊缝自动调节上的应用
t l d b epo ot nl a e o t l d cl d r tru haP C i r e t a js tegp a d cmp n a e eit n a t t r l yt rp r o a v vsc n ol yi e o g L od r o dut h a n o e st t va o u ma - oe h i l r e n sh n eh d i o i
cU .Egt a e cn o e y ne s m w s dpe i nvlu es i t e. n uo t dut g fo e pw 8r l ay ih vl s ot l dcl dr yt a otdi t s oe tb r he r adat i ajsn l r a a e - v rl i s e a nh tg n ma c i orl g a
Ab ta t T e h d a l o to y tm fa n v l u e s a g tn r w s ito u e s r c : h y r u i c n r l se o o e b t ih e e a nr d c d,i h c h o i o ft e rl a o - c s t r n w ih t e p st n o ol w s c n i h s
阀控液压缸动力机构通用传递函数建模与分析
液压气动与密封/2018 年第 02 期 doi:10.3969/j.issn.1008-0813.2018.02.006
阀控液压缸动力机构通用传递函数建模与分析
郭洪波,水涌涛,李 磊,及红娟
(北京航天长征飞行器研究所,北京 100076)
摘 要:根据力平衡和输出功率的关系定义了阀控液压缸的负载压力和负载流量,针对非匹配的阀控液压缸动力机构存在的压力突跳
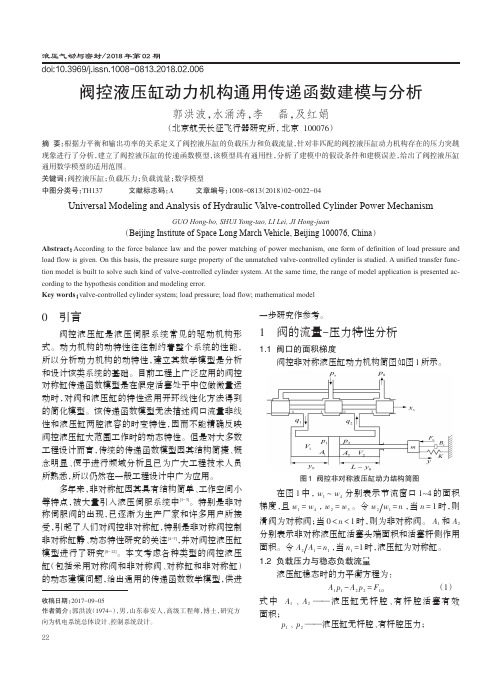
面积。令 A2 A1 = n1 ,当 n1 =1 时,液压缸为对称缸。 1.2 负载压力与稳态负载流量
液压缸稳态时的力平衡方程为:
A1 p1 - A2 p2 = FL0
(1)
式 中 A1 、A2 —— 液 压 缸 无 杆 腔 、有 杆 腔 活 塞 有 效
面积;
p1 、p2 ——液压缸无杆腔、有杆腔压力;
示为:
( ) qsv1 = Cd Asv1 2 ps - p1 ρ
(3a)
( ) qsv2 = Cd Asv2 2 ps - p2 ρ
(3b)
( ) qsv3 = Cd Asv3 2 p2 - p0 ρ
(3c)
( ) qsv4 = Cd Asv4 2 p1 - p0 ρ
(3d)
式中 xv ——伺服阀阀芯位移量; p1 、p2 ——液压缸两腔的压力; Cd ——滑阀的流量系数; Asvi ——伺服阀第 i 个阀口的过流面积;i=1,…4。
阀控非对称液压缸建模方法研究
阀控非对称缸频域建模研究吕云嵩(南京工程学院机械系南京 211167)摘要:阀控非对称缸的数学模型包含两个不相等的子模型,为便于经典控制理论分析处理,其频域模型必须整合为单一解析式。
针对以往不考虑系统结构的影响,利用负载压力和负载流量的定义实现整合的不足,提出了阀控缸的统一频域模型——分段传递函数。
在函数结构参数分析的基础上,借助数字仿真,探讨了典型系统模型整合算法与系统结构因素间的关系,提出了变量整合、参数整合的概念和方法,给出了通过分段传递函数整合获得等效传递函数的建模方案。
对常规液压伺服系统,等效传递函数的阶跃响应与数字仿真基本吻合,与以往模型相比精度明显改善。
主题词:非对称缸建模液压频域分析中图分类号:TH137.520 前言阀控非对称缸是一种用途广泛的液压动力机构,其数学建模问题也是近年来国内理论界关注的一个热点问题。
非对称缸活塞两侧面积不等,描述其正反向工作油路的数学模型也不同。
当油路切换时,数学模型随之转换,因此阀控非对称缸的数学模型是含有两个子模型的分段模型。
分段模型不便于经典控制理论分析处理,所以早期液压伺服理论只以数学上容易处理的对称缸为研究对象[1]。
刘长年教授首先研究了非对称缸建模[2]。
其后又有一些学者开展了相关研究[3-7],其范围涵盖频域和状态方程建模。
状态方程因凭借现代数字仿真技术,成功地解决了分段模型的解算难题,受到当今学术界的普遍重视[5-9]。
但数值解只能利用图线对响应的总体特征作结论性描述,不像频域分析那样能清晰地体现系统的构成及其响应的物理本质,故状态方程在现阶段还不能完全取代频域模型。
对于非对称系统,频域建模的难点在于分段模型的整合。
长期以来,这项研究一直沿用对称缸的方法,把研究重点放在负载压力和负载流量的定义上[2-6],其实质就是通过变量整合实现微分方程的整合。
由于这种方法不能反映系统结构因素对模型的影响,所以建模误差较大。
国外近年来的研究偏重于数字仿真和系统控制等应用领域,在频域建模上没有新的进展[7-8]。
对称四通阀控非对称液压缸系统的建模与仿真

l P s - P L
2 01 5 . 0 9建设机械技术与管理 8 7
个节 流窗 口是 匹配 和对 称 的,供 油压 力 恒定 ,回油压 力 为零 。则可 建立 阀的线性 化流量方程 为 [ 4 ] :
q L =Kq x 一 K £ ( 5 )
一
q l + q 2
g l +g 2
在式 ( 7 )和 ( 8 ) 中,外 泄 露 流 量 C e p P 和C :
通 常 很小 ,可 以忽 略 妞果 压 缩 流 量 和
吼
一
( 6 ) - 2 v 亟 相 等 q d t … 一 l =2 u q 2。 。
以滑 阀为研 究 对 象 ,假 定 阀与液 压 缸 的连 接 管道
对 非对 称 液 压 缸 的分 析,建 立 了对 称 四通 阀控 制非对
P 一P
( 3 )
由式 ( 1 )~( 3 )可得 :
P , + 2  ̄ P L
( 4 )
称 液压 缸的数 学模 型 ,利用 MAT L AB中的 S i mu l i n k 工具包 建 立了系 统的仿真模 型 ,并结合 实际例子对其 动 态特性 进 行 了仿真分析 。
—
— -
:
2( ]  ̄ P 1 ) =
'
S
( 2 )
p S
Po
式中 : C d一 流量 系数 ; W一 阀的面积梯度 / m; P 油液密度 / ( k g / m 1 。 定义负载压 力 P L 为:
=
图1 对称 液 压 缸也 称为 单杆 活塞 缸 ,与对 称 液压 缸
豳长安大学 道路施 工技术与装备教 育部重点实验 室 刘 航/ L I U Ha n g 谢 东/ XI E D o n g 赵 ’  ̄/ Z HA O Wu
对称四通阀控非对称液压缸动态分析

2 2 建立 系统 方程 .
参数见 图 2 。
建模和仿真。在仿真计算过程中 , 考虑输入量及干
扰量的存在 ,输出结果 能直观反应 出干扰量 的影 响。本文根据某 20t 0 平板车实际数据 ,对系统 的
某些参数进行修正 ,实现转 向系统 比较理想 的控制
结果 。
图 2 对 称 四通 阀控 非对 称液压缸
维普资讯
对 称 四 通 阀控 非 对 称 液 压 缸 动 态 分 析
大 连理 工 大 学
摘
史显 忠
屈福 政
要 :转 向系统是大型平板车行驶 的核 心部件 。对 由对称 阀控非 对称 液压缸 组成 的转 向系 统 的动态特 性
进行研究 , 应用 M tb aa 所提供 的 S un 进行建模 、仿真 , l i lk mi 为转 向系统设计 提供 参考 。
Q Cl/ 。 dX : Ov ), \
’
一
( 1 )
67 —
维普资讯
维普资讯
32 建立仿真程序 ,得 出仿真结果 .
根 据 系统动 态方 程及 方块 图 ,确定 以阀芯 位 移
g 要 < 曝 阻尼系数、弹簧刚度 以及外负载等。
上系统压力曲线和液压缸位移曲线 。通过调整系统 的阻尼 ,可以得出以下结论 :在 阶跃信号输人 的前 06S . 内,由于伺 服阀芯 的瞬态滑移 ,液压缸 的运 动参数 变化较 大 ,06S . 之后 ,曲线趋 于平稳 ,此
时 ,系统 处 于稳定 工 况 。阻 尼越 大 ,振 荡越 小 ,超
()滑 阀响应 为 理想 状 态 ,阀 的 4个 节 流 口匹 1
配对 称 ;
()节流 口流动状态为紊流 ; 2 ()供油压力 P 为恒定 ( 3 恒压 ) ; ()温度和密度均为常数 ; 4 ()不考虑管路 的动态影响和沿程损失 ; 5 ()不考 虑 液压 缸 内泄 漏情 况 … 6 1。 设 2A =凡 / 1 ,负载压力 P = 1 p ," 1 L P 一n2 Q =
比例阀控制非对称液压缸系统的非线性建模与仿真
本 文 以 电液位 置 控 制 系统 为 研 究 对 象 , 首 先建 立
在式( 1 )~ 式( 3 ) 中, 消去 中 间变 量 Q 和Q , 以 阀 芯位移 为输 入 , 以两腔 压力 P 。 、 P 以及 活塞杆 的位 移 Y和速度 Y为状 态变量 , 在 MA T L A B中编 辑 S - F u n c t i o n 便 可得 到 阀芯正 向移动 时 的阀控缸 模型 。 同样 阀芯 负 向移动 的模 型可 根据式 ( 4 )~式 ( 6 ) 得到, 两 者 可通 过
控 非对 称缸 整个 闭环 系统 的仿 真分 析 , 为 系统 的设计 提供 指 导 。 关键 词 : 比例 阀 ; 非对 称缸 ; 非 线性模 型 : 仿 真 中 图分类 号 : T H1 3 7 文 献标 志码 : B 文章 编号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 0 4 - 0 0 2 5 - 0 5 引言
称会 不会 超 出额 定流 量 , 这 些疑 问都 使 考查 系统的 中间状 态显得 非 常重要 。 签 于此 , 该 文建 立 了阀控 非 对称 缸 的非 线性微 分 方程 模型 , 同时在 A ME S i m 液 压仿 真软 件 中建 立 了相 同的模 型 以进 行 对 比验 证 , 最后 进行 阀
差 分析 , 很难 把握 系统 的 中间状 态( 如 液压缸 两腔压 力和 流 量的 变化 ) 。 而直接 以物理 微 分 方程 建 立起 的 阀 控缸 非 线性模 型 可 方便 地 进行 数值 仿 真分 析 , 从 而 对 系统 的 中间状 态有 直接认 识 。 当采 用 对称 阀控 制 非对
的开 环和 闭环 传递 函数 。这 种方 法对 分 析 系统 的稳定 性 和稳 态 误差 非常 有效 , 但 对一 些 中间变 量 , 如液 压缸
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对称滑阀控制非对称液压缸系统传递函数的求解
和云敏
【期刊名称】《长江工程职业技术学院学报》
【年(卷),期】2013(030)003
【摘要】非对称液压缸相对于对称液压缸具有占用空间小、制造简单等优点,在液压伺服控制系统中很常见.但最新研究表明:对称滑阀控制非对称液压缸的伺服控制系统在其应用中也存在许多的弊端,国内外许多学者都试图通过建立对称滑阀控制非对称液压缸的数学模型并进行分析,以研制最佳的控制策略.因此,正确建立相关的传递函数,对保证非对称缸系统的动态性能、稳态性能非常重要.本文求解的对称滑阀控制非对称液压缸的传递函数,可作为对此类系统进一步的研究和分析时的参考资料.
【总页数】3页(P29-31)
【作者】和云敏
【作者单位】长江工程职业技术学院,武汉430212
【正文语种】中文
【中图分类】TH137.51
【相关文献】
1.连铸机结晶器液压振动采用非对称型液压缸的传递函数的分析与计算 [J], 谷振云;李生斌
2.基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真 [J], 肖晟;
强宝民
3.基于MATIAB SIMULINK非对称阀控非对称液压缸控制系统的仿真分析 [J], 李东君
4.四边滑阀控制液压缸传递函数的一种求解方法 [J], 刘子龙;庄显义;刘国忠;李洪人;强盛
5.四通阀控非对称液压缸传递函数的分析和建立 [J], 蒙争争
因版权原因,仅展示原文概要,查看原文内容请购买。