阀控非对称缸位置系统的非线性建模
对称阀控制非对称缸电液伺服系统建模分析
尸) 臼
— —
,
“
无 杆 腔活 塞有 效作 用 面 积 , 有杆 腔活 塞有 效 作用 面 积 ,
m
— —
式 ( . )所描 述 的伺 服 阀负 载流 量特 11 2 性 是 非线 性 的 。 系统 进行 动态 分析 时 , 对 必 须 将 这个 方程 线性 化 。 经过 线 性化 处理 后 的 负载 流量 特 性方 程为
出发 ,忽略 粘性力 和弹 性力 的影 响 , 各级 对 传 递 函数进 行简 化 , 整合 出对 称 阀控制 非对 称液 缸 电液伺服 系统 的传 递 函 。
l 液 压 动 力 机 构
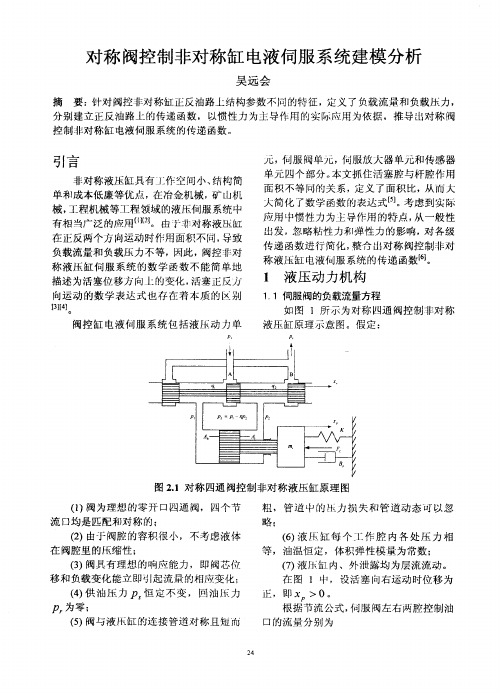
1 1伺服 阀的负载流量方程 . 如 图 1所 示 为对 称 四通 阀控制 非对 称 液压 缸原 理示 意 图。假 定 :
( .) 19
( .0 11 )
,
, , 出的流量 q 为 从 液 缸 同汕 腔流 U V ,
记 伺 服 阀 的负载 流量 为 q ,则有 【 , 3
q£= q 1 ( .1 11 )
J C
4 ~ 一 - C p)C
. ‘ 4 ・
ห้องสมุดไป่ตู้p
式 中 : C — — 液 缸 内 泄 露 系 数 ,
q= dx/P 2 CW 1 2 三 V
(2 1) ・
式 L : q — — 汕缸 尢 杆腔 流量 , m s } j q — — 油缸 有 杆腔 流量 , S C —流 量 系 数 ,无量 纲 — 节流 阀 口面 积梯 度 , m x 电液 伺 服 阀 阀芯 位 移 , m p—— . 度 , k m 油密 g P — — 汕源 压 力 , 尸 P — — 油缸 尢 杆腔 力 . Pa P — — 油 缸有 杆腔 压 力 , Pa 根据 流 量 的连 续性 , 呵写 山每个 液 缸 l 作腔 的流 量方 程 , 即 流 入液 缸 进 油腔 的流 量 g 为 + :+ c( )c . (・ 3
智能阀门定位器非线性特性与建模问题研究
311气动调节阀在工业生产中具有重要的作用,由于自身的结构特点,此类阀门的定位器在使用过程中存在非线性特性,即输入信号达到一定阈值后才能引起阀位动作,在一定程度上限制了阀门的调节性能。
研究该特性的具体成因,建立相关的运动模型,有利于进行优化设计,故对其展开研究。
1 阀门定位器非线性特性测量与建模1.1 饱和非线性特性建模1.1.1 饱和非线性特性的表现形式饱和非线性用于描述控制信号和输出信号的某种特定关系,假设存在一个阈值,当控制信号大于(小于)阈值时,输出信号发生变化,反之则输出信号维持不变,其形成条件较为特殊,仅短时出现,但是却能显著影响控制系统。
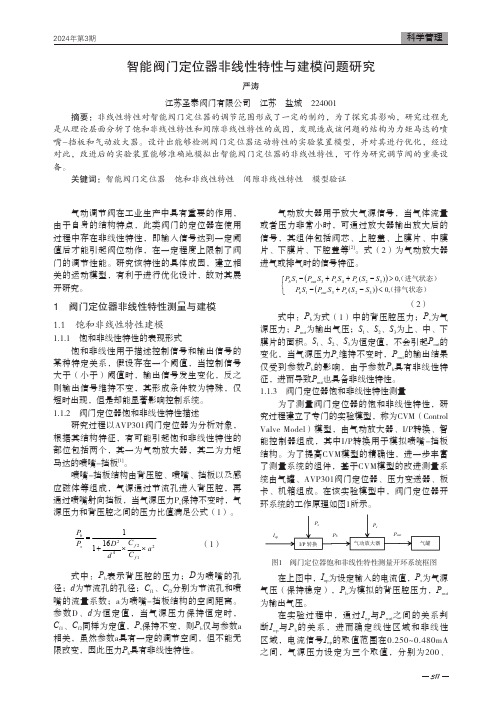
1.1.2 阀门定位器饱和非线性特性描述研究过程以AVP301阀门定位器为分析对象,根据其结构特征,有可能引起饱和非线性特性的部位包括两个,其一为气动放大器,其二为力矩马达的喷嘴-挡板[1]。
喷嘴-挡板结构由背压腔、喷嘴、挡板以及感应磁体等组成,气源通过节流孔进入背压腔,再通过喷嘴射向挡板,当气源压力P s 保持不变时,气源压力和背压腔之间的压力比值满足公式(1)。
保持不变时,气源压力和背压腔之间212421611a C C dD P P f f sb⨯⨯+=((1)式中:P b 表示背压腔的压力;D 为喷嘴的孔径;d 为节流孔的孔径;C f1、C f2分别为节流孔和喷嘴的流量系数;a为喷嘴-挡板结构的空间距离。
参数D、d 为恒定值,当气源压力保持恒定时,C f1、C f2同样为定值,P s 保持不变,则P b 仅与参数a 相关,虽然参数a具有一定的调节空间,但不能无限改变,因此压力P b 具有非线性特性。
气动放大器用于放大气源信号,当气体流量或者压力非常小时,可通过放大器输出放大后的信号,其组件包括阀芯、上腔盖、上膜片、中膜片、下膜片、下腔盖等[2]。
式(2)为气动放大器进气或排气时的信号特征。
的信号特征。
()()⎩⎨⎧<-+->-++-(排气状态)(进气状态),0)(,0)(323132431S S P S P S P S S P S P S P S P s out b s s out b ((2)式中:P b 为式(1)中的背压腔压力;P s 为气源压力;P out 为输出气压;S 1、S 2、S 3为上、中、下膜片的面积。
路形模拟器电液伺服阀控缸建模及其非线性PID控制
路形模拟器电液伺服阀控缸建模及其非线性PID控制任锐;缪伟;董文杰【摘要】介绍道路模拟器国内外发展现状及主要应用,针对模拟器商用化提出基于路形的轮耦合道路模拟器;简介路形模拟器原理并建立单通道电液伺服阀控制非对称液压缸的数学模型,通过SIMULINK分析单通道系统的动静态特性,对比线性PID 及非线性PID控制系统特性,表明非线性PID控制单通道系统响应精度高且响应速度快.【期刊名称】《机械制造与自动化》【年(卷),期】2016(045)002【总页数】4页(P177-179,195)【关键词】道路模拟器;伺服阀;非对称液压缸;非线性PID控制【作者】任锐;缪伟;董文杰【作者单位】南京理工大学教育实验学院,江苏南京210094;南京理工大学教育实验学院,江苏南京210094;南京理工大学教育实验学院,江苏南京210094【正文语种】中文【中图分类】TM921.5道路模拟试验台是为汽车工业中用于车辆耐疲劳性检测而开发的,并发展成为2种类型:轮耦合式和轴耦合式。
随着道路模拟器的发展,模拟对象经历了3个阶段[1]:简单路面模拟、有效路形模拟、响应信号模拟,使得模拟效果不断逼近实际道路。
同时其模拟控制技术也逐渐发展为采用远程参数控制RPC[2]进行道路模拟,控制过程采用相关分析或频谱分析精准复现道路激励。
国外在道路模拟器方面处于领先地位,MOOG公司与MTS公司分别在轮耦合和轴耦合道路模拟器具有代表性[3]。
MOOG公司先后研发了8通道和12通道的轮耦合实验台用于整车性能测试,MTS公司研制了先进的轴耦合道路模拟试验台。
国内在该方面也取得了一定成就,国内多所著名高校实现对道路模拟试验系统的软硬件国产化、进行道路谱获取方法研究[4]、控制算法的研究,其中哈尔滨工业大学[2]成功研制了轮耦合道路模拟器,并预研了6自由度轴耦合道路模拟器。
此外,同济大学的胡毓冬、周鋐[5]等对道路模拟实验台进行虚拟化,并实现虚拟环境中的载荷复现。
阀控缸建模方法的数字仿真比较

]:电极,则电极尺寸比所需要的尺寸小,通过电火花
放电加工后的模具尺寸相应偏小,丽产品尺寸也偏
小;只有通过方法三(“画出工件缩小余量值之后的
3D图形,再使用平底刀以。的余量直接加工”),加
工后的电极尺寸最为准确,通过电火花放电加工后的
模具尺寸也最为准确,相应的产品尺寸才准确,因此 推荐在实际的加工过程中,尽量使用这种方法。
E:兰集竽
砭——流量增益、m2/s:
(7)
C;(PI—p:)一C。p。】 式中:G。——流量系数,无因次;
(2d)
”——阀口面积梯度,“;
托——阀口开度,“;
P——液体密度,kg/m3;
卢,——系统的等效容积弹性系数,Pa;
见——供液压力,Pa;
p。——液压缸左腔压力,Pa;
p:——液压缸右腔压力,Pa;
编程时给刀具端部侧边增加一个R值,图6所 示,月的值为工件余量的绝对值,然后再指定工件负 的余最值,而实际使用没有端部侧边R角的相同直 径刀具进行加I:。
局部放大图
局部放大图
图8
图9
则加亡情况如图7及图8局部放大图所示,加工过程
中,刀具端部R与工件R面相切,只要工件的负余
量的绝对值不火于刀具的只值,则加工的结果就是
我们所需要的结果。然而,我们实际使用的刀具并不
存在端部的R,所以加工的实际情况不是上图8所示
的理想情况,而是如『翻9所示.川具底部的尖角切入
丁工件内,加工的帮体结果如图l()所示.外侧轮廓 线表示理想的工件外形,内N”E域
轮廓线表示实际加工出的工
件外形。,显而易见,实际加
工出的工件外形小于理想的
l:件外形,刀具切人工件内
应频率与振幅的关系曲
长行程阀控非对称缸建模分析

第1 ( 期 总第 2 期 ) 0
20 0 7年 1 月
赢体钴动 控副
Fu d o rTrn m/so n nt l li P we a s sin a d Co r o
No1Sr lN .0 . ei o ) ( a 2
J n,0 7 a. 0 2
长 行 程 阀控 非对 称 缸 建模 分 析
肖志权 邢继 峰 朱石 坚
湖北武汉 403 ) 30 3
(海军工程大学船 舶与动力学 院
摘要 : 考虑缸压 缩性 流量并重新定义负载流量和负载压力 的基础上 , 在 建立 了长行程 阀控非对 称缸数学模 型 , 包含 正、 反两个方 向的表达式。模型中引入的等 效容积 函数是缸两腔等效容积 ( 或活塞位置 ) 的函数 , 映活塞 在长 行程 反 中不 同位置对阀控缸 性能的影 响。分析 了新模型 的意义以及对于研究长行程 阀控非对称缸 的动态特性 的作用。最
能带来功率不匹配及输 出力定义等问题【 在两个 羽,
收稿 日期 :0 6 0 — 8 20 — 9 2
方 向上 重新 定义 负载 流量 g 和 负载 压力 P 为
作者简介 : 肖志权 , 在站博士后。
维普资讯
2 0
’
赢体钴劲 控副
,
27 第1 0年 期 0
A 2
正 向 -O q-  ̄ I 1 ——p 18 2 ,rq , 一 p 2 —p
A1 A 1 A 2 1
() 1
反 向 < ,Lq ,I 2 O q- 2 一——p: 一 — 1 p 1 — p 2
£
() 2
中间位置不一定是最危险位置 ) ,因此时考虑上述
前
对称四通阀控非对称液压缸系统的建模与仿真

l P s - P L
2 01 5 . 0 9建设机械技术与管理 8 7
个节 流窗 口是 匹配 和对 称 的,供 油压 力 恒定 ,回油压 力 为零 。则可 建立 阀的线性 化流量方程 为 [ 4 ] :
q L =Kq x 一 K £ ( 5 )
一
q l + q 2
g l +g 2
在式 ( 7 )和 ( 8 ) 中,外 泄 露 流 量 C e p P 和C :
通 常 很小 ,可 以忽 略 妞果 压 缩 流 量 和
吼
一
( 6 ) - 2 v 亟 相 等 q d t … 一 l =2 u q 2。 。
以滑 阀为研 究 对 象 ,假 定 阀与液 压 缸 的连 接 管道
对 非对 称 液 压 缸 的分 析,建 立 了对 称 四通 阀控 制非对
P 一P
( 3 )
由式 ( 1 )~( 3 )可得 :
P , + 2  ̄ P L
( 4 )
称 液压 缸的数 学模 型 ,利用 MAT L AB中的 S i mu l i n k 工具包 建 立了系 统的仿真模 型 ,并结合 实际例子对其 动 态特性 进 行 了仿真分析 。
—
— -
:
2( ]  ̄ P 1 ) =
'
S
( 2 )
p S
Po
式中 : C d一 流量 系数 ; W一 阀的面积梯度 / m; P 油液密度 / ( k g / m 1 。 定义负载压 力 P L 为:
=
图1 对称 液 压 缸也 称为 单杆 活塞 缸 ,与对 称 液压 缸
豳长安大学 道路施 工技术与装备教 育部重点实验 室 刘 航/ L I U Ha n g 谢 东/ XI E D o n g 赵 ’  ̄/ Z HA O Wu
阀控非对称缸位置系统的非线性建模_孙萌
1
1 1
阀控非对称缸位置系统方程系统描述 阀控非源自称缸系统的主要部件包括 : 零开口四
边滑阀、 非对称液压缸及各种负载 . 其原理如图 1 所 示, 其中 1~ 4 为节流口 ; P S 与 P T 分别为供油压力 和回油压力 ; P 1 、 P 2 与 Q 1、 Q 2 分别为无杆 腔与有 杆腔的压力和流量; A 1 与 A 2 分别为无杆腔和有杆 腔的活塞有效面积 ; x v 为伺服阀阀芯位移 ; y 为液 压缸活塞位移; m 为活塞杆与负载总质量; K 为弹 性负载弹性系数 ; B c 为黏性负载阻尼系数 ; F ext 为液
式中 : y 为活塞 杆速 度, m/ s; y 为活 塞杆 加速 度,
图1 Fig 1
阀控非对称缸系统原理图 Principle diag ram o f serv o
v alve controlled asy mmetric cylinder
166 St ribeck 曲线描述, 即
北
京
交
通
大
2( P 1 - P T ) / , x v < 0 2( P 2 - P T ) / , x v
3
0
2( P S - P 2 ) / , x v < 0
式中 : Q 1 为 P 1 腔流 量, m / s; Q 2 为 P 2 腔流 量, m 3 / s; C d 为流量系数 ; w 为节流窗口面积梯度 , m; 为液体密度, kg/ m 3 ; x v 为阀芯位移 , m , 定义向右为 正方向 . 2) 液压缸连续性方程为 Q 1 - Q L, i = V 1 + V 1 dP 1 dt ( 2)
[ 2]
等学者对非对称缸系统做了进一步理论探索 . 其中 李洪人等从不 同角度对阀控非对称缸 的动静态特 性 、 控 制策略 对非对 称性的 补偿 究 , 并取得了一定的成果.
基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真
义的 pL 和 Q L 对非对称和对称动力机构均适 用, 具有 普遍意义。
1 2 2 液压缸负载流量方程的推导
( 1) 比例阀的流量方程
如图 2所示, 假设回 油压力 p0 = 0, 则比例 阀左 右两腔的流量方程为
1 电液比例位置控制系统的数学模型 电液比例位置 控制系 统由控 制器、比 例放 大器、
比例方向阀、液压缸、负载以及位移传感器组成, 如 图 1所示。
图 1 电液比例位置控制系统组成示意图
1 1 比例放大器和比例方向阀数学模型的简化 由于在系统工作频率范围内起主导作用的是阀控
缸动力机构环节, 其固有频率一般是系统中的最低转 折频率, 而比例方向节流阀的转折频率由比例阀本身 的特性决定, 其转折频率往往远远高于阀控液压缸的 转折频率。
96
机床与液压
第 37卷
动 (即 y > 0) 的情形 为例 进行分 析建模, 活塞负 向 运动的情形可依此类推。
1 2 1 pL 和 Q L 的重新定义 负载压力 pL 和负载流量 QL 是液压动力机 构特性
研究和系统优化设计的基础。目前对阀控非对称液压
缸的 pL 和 QL 的定义通常采用 2种形式: 一种 是沿用 对称情况下的定 义, pL = p1 - p2, QL = (Q 1 + Q2 ) /2; 另一种定义是 pL = p1 - p2, QL = (Q 1 + Q 2 ) / 2, 其中
力系数,
kc =
1 2
∀xv
pp - pL。
pp - pL;
kc 为 流量 压
1 2 3 阀控缸机构的基本方程
非对称缸系统精确建模方法研究
非对称缸系统精确建模方法研究赵周礼1,周恩涛1,周士昌1,李 文2,王少丹2(1 东北大学机械工程与自动化学院,辽宁沈阳110004;2 宝钢股份公司设备部)摘要:本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,仿真结果表明该模型精确有效。
关键词:非对称缸系统;状态方程;建模0 引言由于非对称液压缸占用空间小,加工、密封比较简单,制造成本也较低廉等优点,因此在液压伺服系统中被广泛地采用。
但是,非对称液压缸两腔的作用面积不等,正是结构上的非对称性导致该系统正反两个方向上的动、静态特性不相同,相应的数学模型也不相同。
为了建立非对称缸系统的数学模型,常规的做法是对系统的一些环节作了简化,建立了近似的传递函数数学模型[1][2]。
文献[3]针对液压缸活塞杆正反两个运动方向,采用分别建模的方法,建立相对准确的数学模型,但给系统仿真带来一些困难。
本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,并利用四阶龙门库达法求解该微分方程,仿真结果表明该模型精确有效。
1 电液比例阀2 压力传感器3 位移传感器4 伺服液压缸5 侧导板6 卷筒图1 助卷辊电液伺服系统示意图1 系统结构介绍图1为某卷取机助卷辊电液伺服系统的示意图。
助卷辊的各种工作方式是依靠电液伺服系统来实现。
图中简单画出三个液压缸的示意图。
文中只建立1号助卷辊伺服系统的数学模型,其它可类推。
图2为阀控液压缸的原理图,图中液压阀线圈被加上正向电流,伺服液压缸向正向运动。
图2中y p 表示活塞杆的位移,B c 为活塞的粘性阻尼系数,F L 为外干扰力,m P 表示液压缸运动部件的质量,m L 表示负载惯量折算到活塞处的等效质量,A 1为液压缸无杆腔的有效面积,A 2为液压缸有杆腔的有效面积,Q 1,Q 2为流入和流出液压缸两腔的流量,p s 为供油压力,p 1、p 2为液压缸两腔的压力,p 0为回油压力,x v 为滑阀阀芯位移。
阀控非对称液压缸建模方法研究
PL F = =
=
P一 l
() 2
( )当活塞 反 向缩 回(< 0 时 , 2 y ) 负载 压 力 为
PL =A
,
=
A
,
= z 一 n
I
() 3 、
n=A: A。 液 压 缸 有 杆 腔 面 积 和 无 杆 腔 面 积 / 为
之 比。
阀控液压 缸系统 ,是工程上应用 比较广泛的传
动 和 动力 系 统 。其 中 , 阀控 对 称 缸 系统 与 阀控 非 对称 缸 相 比 , 有 很 好 的 控 制特 性 , 实 际 生 产 中得 到 了 具 在
F——活塞杆伸 出的外负载 , N; P、 2 — 液 压 缸无 杆 腔 、 杆 腔 的 有压 力 ,a l — P 有 P; ,、 — — 液 压 缸 无 杆 腔 、 杆 腔 的 有 效 工作 面 有
和 阀控 对 称 液 压 缸 的 数 学模 型 , 阀 控 缸 系统 的静 动 态 特 性 分 析 提 供 了理 论基 础 。 为
关键词 : 阀控非对称 液压缸 ; 负载压 力; 负载流 量 ; 学模 型 数 中图分类号 : H1 75 T 3 . 文献标识码 : A 文章编号 : 6 2 5 5 2 1 】3 0 0 — 4 1 7 — 4 X( 0 10 - 0 9 0
假定 : 阀与液 压 缸 的连 接 管 道 对称 且 短 而粗 , 管 道 中的 压力 损 失 和 管道 动 态 可 以忽 略 ;液压 缸 每 个 工 作 腔 内各 处 压 力 相等 ,油 温 和体 积 弹 性模 量 为 常 数 ; 压缸 内外 泄 漏均 为层 流 流动 。 液 () 1当活 塞正 向伸 出 (> 0 时 , y ) 流人 液 压缸 进 油
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式 中 : 一Vd / v为液 压 弹 性模 量 , m2 V 为 = pd N/ ; 液压 缸腔 总容 积 , ; 为 无 杆 腔 容 积 , ; m3 V1 m3 V2为 有杆 腔容 积 , ; i 内泄 流量 , / ; m3 QL 为 m。s Qg 为外泄
【 d X  ̄2P —P )l z < 0 一C W / ( s 2/ , D
式中 : Q1为 Pl腔 流 量 , /; m s Q2为 P2腔 流 量 ,
m3s Cd 流量 系数 ; 2 /; 为 7 为节 流窗 口面积梯 度 , p X m; 为 液体 密度 ,g m3z k / ; 为 阀芯位 移 , 定义 向右 为 m, 正 方 向. 2 液 压缸 连续 性方 程为 )
压缸 活塞 所受 外干 扰力 .
为 了方便 系统 原理性 方程 的建 立 , 如下 假设 : 做
① 4个 节流 窗 口是 匹配而且 对 称 的 ; 节 流窗 口处 ② 的流 动为 紊流 , 液体 压缩 性 的影 响在 阀中予 以忽 略 ; ③ 每个 相应工 作 腔 的各 点压 力相 同 , 液温 度 和容 油 积弹性模 数 可 以认 为 是 常 数 ; 油 源 供 油 压 力 恒 ④ 定 , 回油 压力 为零 . 且 由于伺服 阀与 液压 缸之 间连接
免 了分段带来 的问题 , 型 中参 量 均 为 实 际物理 量 , 模
j d  ̄2P —P )P ≥ 0 /( s 1/, c
l C w  ̄2P1一P )p, < 0 ,、 dx /( T/ z
, — —
() 1
j d x  ̄2P 一P )Pz ≥ 0 w / ( 2 T/ , C
b n r p d lo av o to ld a y me rc c l d r p st n s se i b i , a c r i g t h o d g a h mo e fv l e c n r l s e m ti y i e o ii y t m s u l n o t co dn o t e
阀 控 非 对 称 缸 位 置 系 统 的 非 线 性 建 模
孙 萌 , 李长春 , 延 皓 , 刘晓 东, 张金英 , 东杰 母
( 京交通 大学 机械 与电子控制工程学 院 , 京 10 4 ) 北 北 0 04
摘
要 : 对伺服 阀控 非对称 液 压缸 系统存在 的 非 线性特 性 , 据液 压 系统 工作 原理 , 用 功 率键 针 根 应
Ab ta tAi n tn nie r y o ev av o told a y sr c : mig a o l a i fs ro v le c n rl s mmerch d a l yid rsse ,t e n t e ti y rui c l e y tm c n h
我 国液 压领 域 对 仿 真技 术 的应 用 开始 于 2 0世 纪7 0年代 末 到 8 0年 代 初 , 液 压 系 统 动 态通 用 软 而
件 包 的开 发 研 究 大 约从 1 8 9 4年 开 始 . 大 的 张 尚 浙 才 、 海交 大 的仁锦 堂 、 上 大连 的倪 重辉 、 田树 军 、 刘能
第3 6卷 第 4期
21 0 2年 8月
北Байду номын сангаас
京
交
通
.
大
学
学
报
V0 . 6 No. 13 4 Au .2 1 g 02
L I NG IA0T 0F BE 儿 I ONG UNI VERSI TY
文 章 编 号 :6 30 9 (0 20 —1 40 17 —2 12 1 )40 6 —5
收稿 日期 :0 11 —2 2 1-01
基金项 目: 北京市科委基金资助项 目( 0 0 0 14 7 1 Y 350011) 作者简 介: 孙萌 (9 3 )男 , 1 8 一 , 河南开封人 , 博士生 . 研究方向为机电液控制系统和运动控制系统等 .mal0 16 9 @bt.d .n e i 8 12 1 jueu c :
管短 而粗 , 因此 忽略 管道 内的摩 擦损 失 、 流体质 量影
响及管 路 动态 .
1 2 动力 机构 基本 方程 .
宏 和 哈工大 的李 洪 人 、 贵 彬 等 在 功 率键 合 图理 论 潘
的发展 过 程 中起 了重要作 用 .
根 据 图 1及 假设 , 出 系统 运 动机 构 的 3个 基 得
样处理 会带 来较 大 误 差 , 无法 准 确 反 映 系统 的动 态 特性 ; 采用 分段 建模 』 ② 的方法 , 在不 同 区间 内进
行线性化建模 , 这样虽然避免了全局线性化带来 的
误 差 , 不便 于用 经 典 控 制 理 论 分 析处 理 ; 采 用 但 ③ 状 态空 间模 型对分 段 模 型进 行 解 算 _ , 样 虽然 避 8这 j 免了分段 带来 的 问题 , 是 模 型 参数 多 为 抽 象 的 中 但 间状态 变量 , 且建 模较 为繁琐 .
中图分类 号 : H17 T 3 文 献标 志码 : A
No i e r m o e i g f r v l e c n r le s m m e r c nln a d ln o a v o t o l d a y t i
c lnd r p s to y t m y i e o ii n s s e
第 4期
孙
萌等 : 阀控非对称缸位 置系统的非线 性建 模
功 率键 合 图简 称 键 图 , 由美 国麻 省 理 工 学 院 是
H nyM.P y tr l 授 于 1 5 e r a ne[ 教 9 9 9年 提 出 , D. 由 C. Kan p p R. R sn egⅢJ J U. h mau 等 ro p 、 C. oe b r【 和 . T o 【 发展起 来 的一种 工 程 系统 动 态仿 真 方法 , 已成 为 现 系统 动力 学分 析 的有力 工具 .
等非线 性环 节 的存 在 , 阀控 非对 称 缸 系 统 为非 线 性 系统 . 针对 阀控 非对 称缸 系统 的建模 问题 , 国内外学 者 已做 了一些 相关 研 究 . 长 年_ 首 先 对 非对 称 缸 刘 1 j 的模 型及 动 态 特 性 进 行 了研 究 , 占林 ll李 洪 人 王 、 2
合 图建模理 论 , 建立 了阀控 非对 称缸位 置 系统 的键合 图模 型 . 过模 型 仿 真及 试 验 结果 对 比 , 证 通 验 了模 型 的准确性 , 为应 用各 种控 制策略 改善 系统 性 能提 供 了理论基 础 . 关键 词 : 阀控 非对称缸 ; 非线性 ; 建模仿 真 ; 率键 合 图 功
且可选 取希望 的参 量作 为输 入输 出 , 方便模 型在 不 同 的控 制系统 间转化 . 另外 , 由于功 率 键合 图为非 线 性 建模 , 以准确 地体 现伺 服 阀饱 和 特性 、 压缸 摩 擦 可 液 力、 液压 缸两腔液容 时变特性 和泄漏等非线 性环节 .
1 阀控 非 对 称 缸 位 置 系统 方程
wo kn rn il o y r ui s se a d t emo eig t e r fp we o d g a h.Th ea i f r ig p icpe f d a l y tm n h d l h o y o h c n o rb n rp ev rct o y b n rp d lsp o e yc mp rn i uaind t n e t eut.Th n lzn y tm d i o d g a hmo e r v db o aigs i m lt aaa dts s l o r s ea ay ig sse mo e i a l t r vd h o eia o n ain fri rvn y tm e om a c . s be o p o iet e rt l u d t o c f o mp o ig s se p r r n e f Ke r s v lec n r l da y m ercc l d r o l e r y ywo d :av o tol s e m ti yi e ;n ni a i ;mo eig a d s n n t d l n i lt g;p we o d n muai n o rb n
ga r ph
电液 伺服 系统 是 典 型 的 机 、 、 电 液耦 合 系统 , 具
等学者 对非对 称 缸 系统 做 了进 一 步 理论 探 索 . 中 其 李洪人 等从 不 同 角度 对 阀控 非 对 称 缸 的 动 静 态 特 性[ 控 制 策 略 对 非 对 称 性 的补 偿【J 进 行 了研 、 4等 究 , 得 了一定 的成果 . 并取 目前 非对称 缸 的建模 方法 主要 有 3种 : 将 阀 ① 控缸 系统 全 局 线 性 化 , 用 线 性 化 方 法 建 模 _ , 采 5 这 J
S N n U Me g,L h n c u C a gh n,Y N o a d n Z A Ha ,L U Xio o g, HAN Jn ig,M U o g i G iyn D n,e j
( col f c ai lEet ncadC nrl n ier g B in i tn i rt , e i 00 4 C i ) S ho o hnc , l r i n ot g e n , eigJ oo gUnv sy B in 10 4 , hn Me a co oE n i j a ei jg a
有动态响应速度快 、 精度高等优点 . 非对称液压缸是