家用轿车平顺性的仿真分析
汽车平顺性建模及仿真研究
模拟结果
司机座椅处
30
3.744
40
3.357
50
3.744
60
3.290
3.81 3.17 4.44 3.49
0.374 0.395 0.374 0.399
0.344 0.303 0.377 0.426
111.46 112.02 111.46 112.02
112.73 109.61 111.39 112.58
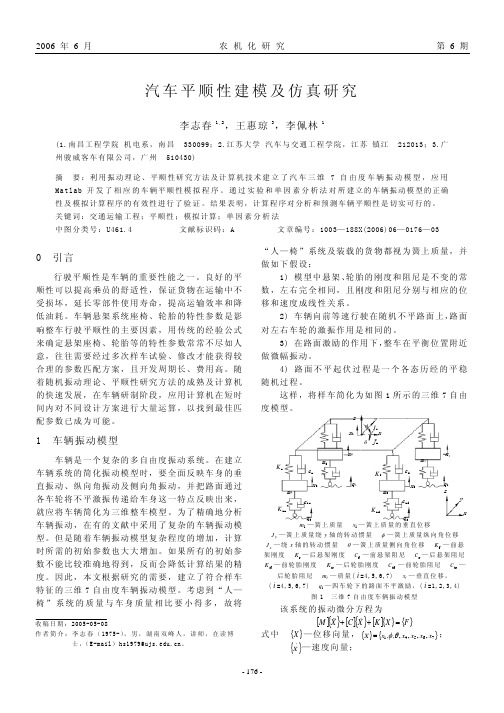
随机过程。
这样,将样车简化为如图 1 所示的三维 7 自由
度模型。
z
y
x1
φ Jyx
θ Jx
x7 m6
m4
x4
Kr
cr
Kf
cf
x6 m7
ctr
q4
x5
m5
ctf
q1 z
y
Ktr
Ktf
x
q3
q2
m1 — 簧 上 质 量 x1 — 簧 上 质 量 的 垂 直 位 移
Jy —簧上质量绕 y 轴的转动惯量 φ —簧上质量纵向角位移
Matlab 开发 了相应的车辆平顺性模拟程序。通过实验和单因素分析法对所建立的车辆振动模型的正确
性及模拟计算程序的有效性进行了验证。结果表明,计算程序对分析和预测车辆平顺性是切实可行的。
关键词:交通运输工程;平顺性;模拟计算;单因素分析法
中图分类号:U461.4
文献标识码:A
文章编号:1003—188X(2006)06—0176—03
0.38
16.00
0.17
0.20
20.20
0.30
0.04
25.40
0.09
0.01
32.00
汽车平顺性仿真分析程序

clear; %清空clc;clf;q=0; %定义初始变量j=1;f_l=0.05;%给最小频率赋值f_u=50; %给最大频率赋值ns=1000;%将0.5-50HZ的频率分为1000段delta_f=(f_u-f_l)/ns;%计算频率变化量Gq_n0=256*1e-6; %选取B级路面不平度等级n0=0.1; %给参考空间频率赋值u=40/3.6; %速度换算md=2*pi*rand(1001,1);%得出1001个随机变量矩阵for t=0:0.01:100 %计算前轮路面输入i=1;for n=1:1:1000f_k=f_l+(n-0.5)*delta_f;Gq_f=Gq_n0*n0^2*u/f_k^2;a_k=sqrt(2*Gq_f*delta_f);q=q+a_k*sin(f_k*2*pi*(t+md(i)));i=i+1;enda(j)=t; %将时间变量赋值给变量ap(j)=q; %将输入变量赋值给pj=j+1;q=0;endfigure(1);plot(a,p); %作图grid on; %给图形加上栅格线xlim([0,100]);ylim('auto');xlabel('时间(s)'); %标注ylabel('路面不平度位移(m)');title('路面时域随机数据(三角级数法)');%对模拟随机输入数据进行功率谱分析,采用矩形窗%fs——分析频率,nf——频域的采样点数-----------[Py0,f]=periodogram(p(1:500),hann(500),500,100,'onesided'); %利用周期图法求前500个点(即前5s)的功率谱Pya=Py0;for i=2:(2*20-1)[Py0,f]=periodogram(p((i-1)*250+1:((i-1)*250+500)),hann(500),500,100,'onesided'); %依次每隔250个点(即2.5s)求一次功率谱Pya=Pya+Py0;endPya=Pya/(2*20-1); %求平均figure(2); %建立图形窗口2% subplot(212);loglog(f(1:500/2),Pya(1:500/2),'r'); %用对数坐标作图grid on;xlim([0.1,50]);xlabel('频率(Hz)'); %标注ylabel('路面位移功率谱密度(m^2/Hz)');hold on %将下面的图形一起绘制在figure(2)中for i=1:500 %计算路面随机输入理论上的功率谱密度fb(i)=0.1*i;Sq(i)=Gq_n0*0.01*u/(fb(i)^2);endloglog(fb,Sq,'-'); %采用对数坐标作图%根据轴距lw和车速V(m/s)生成后轮输入时域数据lw=6.53; %给轴距赋值=========td=lw/u; %计算前后轮时间差l=round(td/0.01); %对round里面的数取整pr=p(1:(10000-l));pf=p((l+1):10000);m1=775;m2=2140;m3=19702;m5=1653;m7=730;m9=51;i4=238000;i6=270;i8=380;k1=1.96E+6;k2=7.84E+6;k3=3.82E+5;k4=1.78E+6;k5=3.14E+6;k6=2.45E+6;k7=1.96E+4;k8=1.96E+4;k9=18121;c3=3.18E+4;c4=1.17E+5;c5=5.00E+3;c6=3.64E+3;c7=7.5E+3;c8=7.3E+3;c9=362*0.75;l2=(6.53-5.42);l3=(5.42+1.18);l4=(5.42+0.32);l5=(5.42-0.65);l6=(5.42-0.64);a=(1.18-0.54);b=(0.64+0.54);c=(0.21+0.32);d=(0.65-0.21);m=zeros(9,9);m(1,1:9)=m1;m(2,1:9)=m2;m(3,1:9)=m3;m(4,1:9)=i4;m(5,1:9)=m5;m(6,1:9)=i6;m(7,1:9)=m7;m(8,1:9)=i8;m(9,1:9)=m9;k=zeros(9,9);k(1,1)=k1+k3;k(1,3)=-k3;k(1,4)=l1*k3;k(2,2)=k2+k4;k(2,3)=-k4;k(2,4)=-l2*k4;k(3,3)=k3+k4+k5+k6+k7+k8;k(3,4)=-l1*k3+l2*k4-l3*k7-l4*k5-l5*k6-l6*k8;k(3,5)=-k5-k6;k(3,6)=c*k5-d*k6;k(3,7)=-k7-k8;k(3,8)=a*k7-b*k8;k(4,4)=l1^2*k3+l2^2*k4+l3^2*k7+l4^2*k5+l5^2*k6+l6^2*k8; k(4,5)=l4*k5+l5*k6;k(4,6)=-c*l4*k5+d*l5*k6;k(4,7)=l3*k7+l6*k8;k(4,8)=-a*l3*k7+b*l6*k8;k(5,5)=k5+k6;k(5,6)=-c*k5+d*k6;k(6,6)=c^2*k5+d^2*k6;k(7,7)=k7+k8+k9;k(7,8)=-a*k7+b*k8;k(7,9)=-k9;k(8,8)=a^2*k7+b^2*k8;k(9,9)=k9;j=i:9;k(j,i)=k(i,j)endK=k./m;C=zeros(9,9);C(1,1)=c3;C(1,3)=-c3;C(1,4)=l1*c3;C(2,2)=c4;C(2,3)=-c4;C(2,4)=-l2*c4;C(3,3)=c3+c4+c5+c6+c7+c8;C(3,4)=-l1*c3+l2*c4-l3*c7-l4*c5-l5*c6-l6*c8;C(3,5)=-c5-c6;C(3,6)=c*c5-d*c6;C(3,7)=-c7-c8;C(3,8)=a*c7-b*c8;C(4,4)=l1^2*c3+l2^2*c4+l3^2*c7+l4^2*c5+l5^2*c6+l6^2*c8;C(4,5)=l4*c5+l5*c6;C(4,6)=-c*l4*c5+d*l5*c6;C(4,7)=l3*c7+l6*c8;C(4,8)=-a*l3*c7+b*l6*c8;C(5,5)=c5+c6;C(5,6)=-c*c5+d*c6;C(6,6)=c^2*c5+d^2*c6;C(7,7)=c7+c8+c9;C(7,8)=-a*c7+b*c8;C(7,9)=-c9;C(8,8)=a^2*c7+b^2*c8;C(9,9)=c9;C(9,9)=c9;for i=1:9j=i:9;C(j,i)=C(i,j)endC=C./m;kt=zeros(18,1);kt(10,1)=k1/m1;kt(11,1)=k2/m2;Q=zeros(18,size(pf,2)); %产生(16*size)全零矩阵,其中size为二维矩阵qf(1*9953)第二维的尺寸(即列数),Q为(16*9553)的矩阵Q(10,:)=pf; %将qf的值赋给第9行,:指9953Q(11,:)=pr; %将qr的值赋给第10行,:指9953p=zeros(9);%p为8*8的矩阵,其中每个数都是0q=eye(9); %q为8*8的单位矩阵,其中对角线上都是1W=[p q;-K -C]; %p q k c均为9*9的矩阵,w为18*18的矩阵nt=size(pf,2); %数据个数,即9953nf=500;h=1/100; %步长,时间间隔x(:,1)=zeros(18,1);%x为18*1的矩阵,且每个数都是0t(1)=0; %定义初始时间%改进的欧拉算法for i=2:nt %nt=9953n=i-1;t(i)=h*i;xL=x(:,n)+h*(kt.*Q(:,n)+W*x(:,n)); %当n=1时,x(:,n)表示x矩阵(18*9553)第n列的列矩阵,kt为16*16的矩阵,Q(;,n)表示矩阵(16*9553)的第n列的列矩阵;x(:,i)=x(:,n)+h/2*((kt.*Q(:,n)+W*x(:,n))+(kt.*Q(:,i)+W*xL));endxac9=W(18,:)*x;figure(3);plot(t,xac9,'k'),grid;axis auto;xlabel('时间(S)');ylabel('垂直加速度[rad/s^2]');title('9DOF人体座椅垂直加速度时域变化');fs=100; %分析频率=1/0.01,0.01为时间间隔nf=500; %每5s一段,单个数据样本个数nb=nf/2; %自谱验算时的参数%重复点数n_n=19;%功率谱密度分析——人体座椅俯系统[Py09,f]=periodogram(xac9(1:nf),hann(nf),nf,fs,'onesided');Pya9=Py09;for i=2:(2*n_n-1)[Py09,f]=periodogram(xac9((i-1)*nb+1:((i-1)*nb+nf)),hann(nf),nf,fs,'onesided');Pya9=Pya9+Py09;endPya9=Pya9/(2*n_n-1);figure(4);subplot(2,1,1);loglog(f(1:nf/2),Pya9(1:nf/2),'k','Linewidth',2);grid on;set(gca,'XMinorTick','off','YMinorTick','off','XMinorGrid','off','YMinorGrid','off')xlim([0.1 50])xlabel('频率[Hz]');ylabel('加速度功率谱密度(m^2/s^3)');title('9DOF Model 人体座椅垂直振动');hold on;delta_f=0.2;ai9=zeros(21,1);f_z9=zeros(21,1);%中心频率for i=1:21f_l=0.5*0.89*1.26^(i-1);f_u=f_l*1.26;f_z9(i,1)=f_l*2^(1/6);%求中心频率%若频率大于50HZ,循环结束%在一个三分之一倍频程内积分for j=1:251f0=f(j);if((f0>=f_l)&&(f0<=f_u))%频率值距1/3倍频带下限小于delta_f,但距上限大于delta_fif((abs(f0-f_l)<delta_f)&&(abs(f_u-f0)>delta_f))ai=Pya9(j)*abs(f0-f_l);%频率值距1/3倍频带上限小于delta_f,但距下限大于delta_felseif((abs(f_u-f0)<delta_f)&&(abs(f_l-f0)>delta_f))ai=Pya9(j)*(abs(f0-f_u)+delta_f);%频率值距1/3倍频带上限、下限均小于delta_felseif((abs(f0-f_l)<delta_f)&&(abs(f_u-f0)<delta_f))ai=Pya9(j)*(f_u-f_l);%频率值距1/3倍频带上限、下限均大于delta_felseai=Pya9(j)*delta_f;endelseai=0;endai9(i,1)=ai9(i,1)+ai;endai9(i,1)=sqrt(ai9(i,1));endsubplot(2,1,2);loglog(f_z9,ai9,'k'),grid;xlim([0.1 50])xlabel('频率');ylabel('加速度均方根值');title('三分之一倍频程的加速度均方值');aw9=0;w_k=0;for i=1:21z=f_z9(i,1);if 0.5<=z&&z<2w_k=0.5;endif 2<=z&&z<4w_k=z/4;endif 4<=z&&z<12.5w_k=1;endif 12.5<=z&&z<=50w_k=12.5/z;endaw9=aw9+ai9(i,1)^2*w_k^2; endaw9=sqrt(aw9);a0=0.000001;law9=20*log10(aw9/a0);。
汽车操纵稳定性和平顺性的仿真研究

科研训练文献阅读综述题目:汽车操纵稳定性和平顺性的仿真研究姓名:学号:专业:班级:指导老师:时间:第一章整车操纵稳定性试验仿真分析本章节,在前悬架优化的基础上建立整车模型。
整车进行转向回正试验、转向轻便性试验、稳态回转试验,并根据国标计分评价。
1.1转向回正试验仿真分析转向回正试验是研究汽车瞬态响应特性的一种重要试验方法,尤其是研究汽车能否恢复直线行驶能力的一种重要试验方法,汽车的转向回正表达了汽车的自由控制运动特性,其实质是一种力阶跃输入试验。
国标 GB/T6323.4-94对试验做出了相关规定。
低速回正试验在半径为15m圆周上侧向加速度达到4m/s^2,,然后然放松转向盘,记录汽车的状态。
由于该重货车最高车速为90km/h,按照国标规定不需要进行高速转向回正试验。
对于侧向加速度达不到4士0.2m/s^2的汽车,按试验汽车所能达到的最高侧向加速度进行试验。
试验按向左与向右两个方向进行,每个方向三次[1].1.1.1仿真曲线:仿真中设定圆弧半径为15m,要达到4士0.2m/s的侧向加速度车速必须大于7.746m/s^2。
左转低速转向回正试验具体仿真结果如下(右转仿真结果略):1.1.2仿真结论:对于虚拟样车系统,回正特性的主要参数根据国标GB/T6323.4-94规定的转向回正试验要求计算,结果见表6-1。
1.2转向瞬态响应试验(转向盘转角阶跃输入)仿真分析瞬态转向特性是指汽车在受到外界扰动下,达到稳态状态前表现出来的特性,瞬态转向特性是汽车最重要的性能之一,是评价汽车高速行驶安全性的一个重要指标。
1.2.1试验方法:具体做法参照国标GB/T6323.2-1994。
试验车速按被测汽车最高车速的70%并四舍五入为10的整数倍确定。
该重型货车最高车速为90KM/h,所以试验车速取6Okm/h。
试验中转向盘转角的预选位置(输入角),按稳态侧向加速度值1-3m/s^2确定,从侧向加速度为lm/s^2做起,每间隔0.5m/m^2进行一次试验。
汽车平顺性评价范文
汽车平顺性评价范文
汽车平顺性主要与悬挂系统、轮胎、底盘和车身结构有关。
首先是悬
挂系统的设计和调校。
悬挂系统主要由弹簧和减震器组成,它们能够吸收
道路不平和振动,减少车辆的颠簸感。
良好的悬挂系统能够使车辆行驶时
保持平顺,提供更好的悬挂舒适性。
另外,悬挂系统的调校也需要根据车
辆的定位和用途进行相应的调整,使之更适应不同的行驶环境和需求。
其次是轮胎的选择和质量。
轮胎作为车辆与地面之间的唯一接触面,
对行驶平顺性有很大的影响。
优质的轮胎能够提供更好的抓地力和操控性,降低震动和噪音,从而提升车辆的平顺性。
此外,轮胎的气压也需要保持
合适,过高或过低的气压都会影响车辆的平顺性。
底盘的刚性和结构也是影响汽车平顺性的重要因素。
底盘的刚性能够
影响车轮悬挂的运动和减震器的工作,过弱的刚性会导致车身的弯曲和扭动,从而降低平顺性。
而良好的底盘结构能够提供更好的车身稳定性和刚性,减少车辆在行驶过程中的晃动和颠簸感。
最后是车身结构的设计和材料选择。
车身的设计和材料可以影响车辆
的重量和抗振性。
轻量化的设计能够降低车辆的重量,减少振动和颠簸感,并且提升燃油经济性。
而抗振性好的材料可以减少车身的共振和震动。
总之,汽车平顺性是一个综合性的评价指标,它受到悬挂系统、轮胎、底盘和车身结构等多个因素的影响。
一辆平顺性好的车辆需要在各个方面
都有良好的设计和调校,才能提供给乘坐者舒适的驾驶体验。
在购买车辆时,平顺性也应该是一个重要的考虑因素之一。
刚柔耦合汽车平顺性仿真及试验研究

刚柔耦合汽车平顺性仿真及试验研究引言汽车平顺性是指车辆在行驶过程中对车内乘员舒适安全的影响程度,是衡量车辆行驶质量的重要指标之一。
对于乘坐长途或者高速行驶的用户来说,车辆平顺性直接关系到驾驶感受以及行车安全。
为了保护车内乘员的身体健康以及满足高端用户对于行车舒适性的要求,汽车制造厂商和科研机构都开始将平顺性打造成为一个优先考虑的研究方向。
因此,针对汽车平顺性的仿真及试验研究,已经成为了当前汽车工程中的一个热点问题。
1 汽车平顺性的研究意义汽车平顺性作为决定行车乘坐舒适性的主要因素之一,其水平直接决定了驾驶员的舒适感受以及车内乘员的身体健康。
对于汽车生产厂家而言,拥有良好的平顺性技术能够使得企业生产的汽车质量更加高端。
对于由家庭、旅游等需求驱动的消费者而言,平顺性成为了选购汽车的主要指标之一。
同时,汽车平顺性的研究关注点和理论应用深度,可以推动更多汽车相关的技术发展,具有深远的影响。
2 平顺性仿真及试验的研究内容平顺性仿真及试验的研究内容主要包括:2.1.设计车型及数据处理方案:根据所研究的汽车类型、驾驶场景、行车路线以及道路条件等因素,制定相应的试验计划,并对数据采集以及处理过程进行理论建模与数据分析。
2.2.行车路面条件仿真:通过计算机软件仿真实验,模拟不同道路条件(如辣椒路面、石子路面等)下车辆的行进情况,改变路面的摩擦力、高低程度、毛坯路的情况,更好地体现汽车的平顺性。
2.3.车辆各类性能测试:通过实车或者虚拟仿真平台进行相应测试,包括车辆实测加速度、车轮反弹度、悬挂改变、轴距以及螺旋卷等。
并对车辆运动状态,震动情况,音响特性以及噪音等进行较为全面的分析。
2.4.优化改善方案的实现:在针对汽车平顺性的优化过程中,可以根据行车乘坐的实际情况以及业界最先进的设计思想。
通过图形化处理统计、工程模拟、模型试验等技术手段快速优化车型设计,打造最符合市场的高端低品质产品。
3 仿真及试验研究的思考和发展趋势要全面掌握汽车平顺性的仿真及试验研究技术,需要对传统平顺性实验和计算模型所涉及到的问题和方法进行了解。
整车平顺性仿真的标准化分析研究

将模 型 的坐标 与整 车坐 标 调整一 致 , 成后 面 结果 处理 造 过程 的一 系列 问题 。
在 Hy eMeh中导入 S P格 式整 车 C pr s T AD模 型 ,也 可 以是各 分系 统 分别 导入 , 证装 配到 位 。 保 调整 模型坐 标系 ,使 模型 坐标 系与 整 车坐标 系相 一致 。 41 模 型关 键 点的定 义 .. 2 多 体动 力 学模 型 中 的关 键 点是 指运 动 连 接 部件 之
标准 化
—
整 车平顺性仿真 的标准化分析研 究
张 克 鹏
( 陕西重型汽车有 限公司 陕西 摘 西安 700 ) 120
要: 为了规范整车在平顺性研究方面的仿真计算, 本文提 出了从输入要求到平顺性模型建立及最后
的数据处理等一系列标准化研究的方法。 该方法在企业的应用实施工作表明, 采用整车平顺性仿真的标 准工作方法,可以很好地规范 C DC E数据 ,既保证了设计各阶段数据的全相关、共享,同时也保证 A /A
ZHANG Ke p n —e g
S a n i a y Du yAu o b l . t h a x He v t t mo i Co , d e L Ab t a t I r e a d r i e h mua in o e e e c f e il d mf r t i p p u r r sre sr c : n o d r os n ad z es lt nt s a ho v h ce iec t t t i o h r r r o o t h s a e p t o wa da e is , r f o a d dz d r s a c t o sfo ip t e ur me t i ec mf r d l n ef a aa p o e sn . h fs n a ie e e h me d m u q i t r r h r n r e n st r o o t o d mo e d t n l t r c s i g T e a h i d a p iai n f h t o t p i lme t t nwo ks o t a e t d dwo k n t o f i l ino p l t s t emeh d i e e rs i e n i r w th a a r i gmeh o s c o o n n r e mp a o h h t sn r d mu a o n t v h ce i ec mfr a a d r i e e il d o o t n s r c t adz n CAD/ CAE d t. h s o n ye s r s h ltd a ds a ig d t r a h sa e a T i n t l n u e e e ae n r n a f c g a o t r h a oe t
基于虚拟样机的汽车平顺性仿真分析

基于虚拟样机的汽车平顺性仿真分析第一章:绪论随着现代汽车技术的不断发展,越来越多的人开始关注汽车平顺性。
汽车平顺性是指汽车在驾驶过程中的舒适性和稳定性。
对于消费者而言,汽车平顺性是购车时非常重要的一个考虑因素。
对于汽车制造商而言,汽车平顺性也是需要重视的一个技术指标。
现有的汽车平顺性测试方法主要是在实际路况下进行测试,但这种方法存在一定的局限性,比如受到天气和路面情况的影响,测试结果可能不稳定。
另外,实际测试可能需要消耗大量的资源和时间,增加成本。
因此,基于虚拟样机的汽车平顺性仿真分析方法成为一种比较可行的解决方案。
本文旨在介绍一种基于虚拟样机的汽车平顺性仿真分析方法,通过建立汽车的虚拟模型,对其平顺性进行仿真分析,以实现有效的优化和改进。
第二章:相关技术介绍2.1 虚拟样机技术虚拟样机技术是一种基于计算机仿真的技术,可以在计算机上模拟出机械或电子设备的运行过程,以进行测试和优化。
虚拟样机技术具有成本低、效率高、重复性强等优点。
2.2 汽车平顺性评价指标汽车平顺性评价指标主要包括噪音、震动、舒适性等方面的指标。
其中,噪音和震动指标主要通过加速度计等传感器进行测量,舒适性指标则需要结合人体工程学等相关知识进行评价。
2.3 汽车虚拟模型建立汽车虚拟模型建立需要经过几个步骤,包括数据采集、建模、材质设置、边界条件设置等。
其中,建模过程需要考虑汽车的结构和材料等因素,以提高模型的准确性。
第三章:方法与步骤3.1 数据采集首先,需要对汽车进行数据采集。
可以利用3D扫描仪等设备对汽车进行数字化扫描,或者对汽车进行实际测量,以获取汽车的结构和外形数据。
3.2 建模在获得了汽车的结构和外形数据之后,需要对其进行建模,可以通过CAD等软件进行建模。
建模过程中需要考虑到汽车的结构和材料等因素,以提高建模的准确性。
3.3 材质设置建立汽车模型后,需要进行材质设置,包括轮胎、悬架、底盘等部件的材质设置。
可以参考实际车辆的参数来进行设置,以提高模拟的准确性。
虚拟激励法下汽车行驶平顺性振动仿真分析的开题报告

虚拟激励法下汽车行驶平顺性振动仿真分析的开题报告一、研究背景汽车行驶平顺性是一辆汽车行驶中非常重要的指标之一,对汽车的驾驶舒适度和乘客的健康都有很大影响。
而汽车行驶平顺性振动是影响汽车行驶平顺性的重要因素。
因此,对汽车行驶平顺性振动进行仿真分析,寻求减小振动、提高平顺性的方法,对汽车的研发、生产与使用都有很大的意义。
现有的汽车行驶平顺性振动仿真分析方法主要是基于有限元法、多体动力学法等方法,但这些方法计算耗时较长、要求精度高,不利于实际应用。
而虚拟激励法由于计算复杂度低、精度高、计算速度快,已成为汽车振动仿真研究的热点。
二、研究目的本文旨在研究虚拟激励法在汽车行驶平顺性振动仿真中的应用,并比较虚拟激励法与传统有限元法和多体动力学法的差异性和优劣势,为进一步提高汽车行驶平顺性提供理论基础和实践指导。
三、研究内容1. 文献综述对现有与虚拟激励法、有限元法、多体动力学法相关的文献进行综述和分析,找出其优劣与适用性。
2. 建立汽车行驶平顺性振动的有限元模型及多体动力学模型3. 建立虚拟激励法模型4. 汽车行驶平顺性振动仿真分析通过有限元法、多体动力学法和虚拟激励法三种方法对汽车行驶平顺性振动进行仿真分析,并比较其结果的差异。
5. 优化模型并验证仿真结果对模型进行优化和修正,并验证虚拟激励法的仿真结果与实测数据的吻合度。
四、研究意义1. 探讨虚拟激励法在汽车行驶平顺性振动仿真中的应用优势;2. 汽车行驶平顺性振动仿真部分研究成果可推广到其他交通工具行业,具有广泛的应用前景;3. 初步探究虚拟激励法在汽车行驶平顺性振动仿真领域的作用,为日后研究提出方向和建议。
五、研究步骤1. 数据收集与文献综述;2. 构建有限元模型和多体动力学模型,并分析计算;3. 仿真实验和分析,并和实测数据对比;4. 通过优化模型对实验结果进行改进验证;5. 结果分析和讨论。
六、研究方案1. 建立虚拟激励法模型在汽车行驶平顺性振动仿真方面的应用;2. 对比有限元法、多体动力学法与虚拟激励法在汽车行驶平顺性振动仿真过程中的差异与优劣;3. 优化模型以提高仿真结果的准确程度;4. 验证模型的仿真结果与实测数据的吻合度;5. 结合理论分析和实际验证结果进行结果分析和讨论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
家用轿车平顺性的仿真分析任务书1.课题意义及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,在深入了解汽车悬架系统工作原理以及汽车平顺性的评价方法的基础上,建立系统的数学模型,并利用Matlab中的Simulink工具,对系统进行动态仿真,给出仿真实验结果。
为学生在毕业后从事机电控制系统设计工作打好基础。
2.主要任务(1)分析汽车悬架系统工作原理以及汽车平顺性的评价方法;(2)建立系统的数学模型;(3)编写matlab/simulink 仿真程序;(4)调试、分析仿真结果;3.主要参考资料[1] 余志生.汽车理论.北京:机械工业出版社.[2] 陈桂明,张明照等编著.应用MATLAB建模与仿真 [M].科学出版社.[3] 钟麟,王峰编著. MATLAB仿真技术与应用教程 [M].国防工业出版社.[4] 张森,张正亮等编著. MATLAB仿真技术与实例应用教程 [M].机械工业出版社. 4.进度安排审核人:年月日家用轿车平顺性的仿真分析摘要:本文根据平顺性研究的内容和意义,运用MATLAB/Simulink软件,构造出汽八自由度汽车整车模型,还参考某经济型轿车的参数,给模型赋值进行仿真。
按照国家标准模拟了不同车速下的汽车试验,得出了平顺性仿真在不同车速下时间域和频率域的仿真结果。
本文还根据车辆平顺性的国家B级路面试验结果,对模型的准确性性进行了检验,并分析研究家用轿车的平顺性。
根据实车平顺性的特点,在仿真模型中系统分析了平顺性有关的各参量对汽车平顺性的影响,同时改进车辆悬架系统的一些参数,然后将改进后参数在模型中进行仿真,得出结果,并提出具有一定可行性的建议,为家用轿车平顺性的研究打下一定的基础。
关键词:平顺性,八自由度,Simulink,仿真分析The Simulation Analysis of Family Car Ride Comfort Abstract:Based on the content and meaning of ride comfort studies, using MATLAB / Simulink software, constructed out of steam automobile model eight degrees of freedom, but also a reference to a economy car parameters assigned to the model simulation. In accordance with national standards test simulates the car under different speeds, come to ride simulation simulation time domain and frequency domain at different speeds.This article also based vehicle ride comfort level B state road test results, the accuracy of the model was examined and analyzed,, car ride home. According to the actual vehicle ride comfort characteristics, in the simulation model system analyzes the impact of various parameters related to ride on the vehicle ride comfort while improving vehicle suspension system parameters, and then the improved simulation parameters in the model, too the results and recommendations it is feasible to lay a foundation for the car ride home study. Keywords: Comfort, Eight Degrees of Freedom, Simulink, Simulation Analysis目录1 绪论 (4)1.1 汽车平顺性研究的意义 (4)1.2 汽车平顺性研究的主要内容 (4)1.3 平顺性研究的发展状况 (6)2 轿车平顺性的评价 (7)2.1平顺性评价的研究 (7)2.2 人体对振动的反应 (7)2.3 平顺性的评价指标和方法 (7)2.3.1 ISO 2631标准评价方法 (8)2.3.2 吸收功率法 (11)2.4 平顺性的评价流程 (12)3 随机路面模型研究 (13)3.1 随机路面模型 (13)3.1.1 路面不平度概述 (13)3.1.2 路面不平度表达 (13)3.1.3 时域模型 (14)3.1.4 时域响应 (15)3.2 随机路面模型的构建 (15)3.2.1 汽车前轮受路面激励 (15)3.2.2 前后轮滞后输入的处理 (16)4 平顺性模型的建立及仿真 (18)4.1平顺性建模 (18)4.1.1 八自由度整车力学模型的建立 (18)4.1.2 数学模型的建立 (19)4.1.3 座椅的布置 (23)4.1.4汽车八自由度Simulink仿真模型的建立 (24)4.2 整车平顺性仿真 (26)4.2.1 仿真参数选取 (26)4.2.2 50km/h车速下汽车平顺性仿真结果 (28)4.2.3 60km/h车速下汽车平顺性仿真结果 (29)4.2.4 70km/h车速下汽车平顺性仿真结果 (30)5 平顺性的仿真结果分析 (31)5.1 仿真结果数据处理 (31)5.2 仿真结果与实验结果的时域分析 (33)5.3仿真结果与实验结果的频域分析 (34)结论 (31)参考文献 (32)致谢 (33)1 绪论1.1 汽车平顺性研究的意义车辆平顺性的高低对人和车都有着重要的影响,高平顺性的轿车,人们在驾驶和乘坐时会感到舒适,同时车的各项性能性能也较高。
当今时代,高速公路越来越多,轿车的时速也随之增高,这就使得车辆的平顺性变得更加受人关注,只有拥有好的平顺性的车辆才能获得消费者的青睐。
汽车平顺性是指使驾驶员、乘客和运载的货物免于受到不平道路激励产生的振动而受到损伤的性能[1]。
第一,车辆在运动时,本身会产生振动,同时不平的路面也会使车辆产生振动,导致车内人员处在一个不舒适的环境中。
振动降低了乘客在车内的舒适程度,妨碍着车内人员的操作和生理状况。
不仅使工作效率降低,还严重影响着人的身心健康,当人们较长时间都在振动的环境中,不仅极易感到疲惫,心烦,还能够增高心脏疾病的发病率;尤其是对于家用轿车来说,对整个家庭成员的身心健康都会产生极大的影响。
因此,改善汽车行驶平顺性也是提高主动安全性的一个重要方面[2]。
第二,车辆在行驶过程中,剧烈的振动会对汽车的各个零部件造成损伤,从而使轿车的实用年限便短。
另外,剧烈的振动还降低了汽车的各项安全性能,增加了驾驶风险。
而且,驾驶员为了让车辆停止振动就会降低车速,这样不仅降低了行驶速率,还使得燃油性嫩得不到充分利用,同时增加了排放,污染了大气。
第三,近几十年来,我国经济建设的得到迅猛发展,越来越多的家庭开始在假期选择外出旅游,加之高速公路和高等级公路里程也有了高速增长,家庭自驾游也就成为出行旅游首选。
驾驶高平顺性的轿车出行时,即使要到很远的地方,也能使车内人员一路上保持好的身心状态,这样不仅有利于身心健康,还能降低驾驶风险。
舒适的振动环境也能够使乘员在到达目的地后,可以以良好的状态投入到愉快的旅游中。
由此可以看出车辆平顺性的研究和改善影响深远,尤其是家用轿车,更是影响着人们生活中的各个方面。
目前,家用轿车在生产之前,都要对其平顺性进行多次试验,同时,在其研发过程中也充分考虑了平顺性的重要性。
1.2 汽车平顺性研究的主要内容汽车平顺性讨论的对象是“路面——汽车——人”构成的振动系统,该系统的框图如图1.1所示。
由图可以看出,车速和路面不平度产生激励(系统输入),经过车辆的一些阻尼和弹性元件传递到车身,产生振动、加速度(系统输出)等,完成整个系统的能量传递。
图1.1 “路面——汽车——人”系统的框图上文提到车辆是一个系统,经过激励后能够发生振动响应。
而车内乘员也会随着车辆发生振动,并且其振动的幅度和方向都与车辆本身振动有关,同时这些特性还会影响人体对振动的反应。
激励来源、车辆振动响应、人体对振动的反应和界限是平顺性研究分析的三个方面[3]。
一般来说,能够激起车辆振动的原因有两个,一是车辆本身,二是路面,而路面更是车辆产生振动的主要原因,因此,对路面的研究是平顺性研究的一个重要方面。
查阅资料可以发现,能够用平稳随机过程理论对路面不平度分析描述。
其方法通常是先选取不平度样本,然后利用样本的方差和功率谱密度函数对路面进行分析。
具体情况是:均值等于零时,方差表示路面不平度的大小;功率谱密度函数可以描述路面不平度的能量的空间频域分布。
路面不平度的时域模型可以采用多种方法生成[4],如:滤波白噪声生成法(线性滤波法),基于有理函数PSD模型的离散时间随机序列生成法,根据随机信号的分解性质所推演的谐波叠加法(也称频谱表示法),以及基于幂函数功率谱的快速Fourier反变换生成法等。
目前,学者们已经构造了多种不同的整车模型来研究平顺性,有单自由度的和多自由度的,平面模型或空间模型等等。
一般来说,整车模型和多自由度模型相比其他的模型,得出的结果更为准确,更加符合车辆实际的规律。
但是,多自由度会增加计算的复杂的程度,还难以测定,最终导致结果误差大。
同时,在查阅大量平顺性研究资料后可以发现,由于路面产生的汽车振动不是完全一样的,其对车辆的影响程度有着很大的不同,因此,对于构建的模型来说,有些可能引起误差的自由度是可以忽略的。
本文由作者本身实际出发,在自由度选择时,认为应该选取相对简单易于操作的一种自由度模型。
若要对车辆的平顺性作出评价,尤其是家用轿车,就必须要有评价的方法和指标。
根据资料,可得知轿车平顺性的评价不是一个简单的过程,包含了很多方面。
一般说来,对轿车平顺性的评价主要有主观和客观之分,但是结合多方面原因来说,客观评价更为合适。
因为主观评价的主体是人,而人自身复杂的心理和生理特征都能对评价产生影响,导致结果出现误差。
相反地,客观评价的主体是车辆是以实验数据作为评价指标的,更加的准确客观,具有科学性。
1.3 平顺性研究的发展状况近年来,各国研究人员建立了很多模型对汽车的平顺性进行了分析和研究。