基于MATLAB的汽车平顺性的建模与仿真
汽车平顺性建模及仿真研究
模拟结果
司机座椅处
30
3.744
40
3.357
50
3.744
60
3.290
3.81 3.17 4.44 3.49
0.374 0.395 0.374 0.399
0.344 0.303 0.377 0.426
111.46 112.02 111.46 112.02
112.73 109.61 111.39 112.58
随机过程。
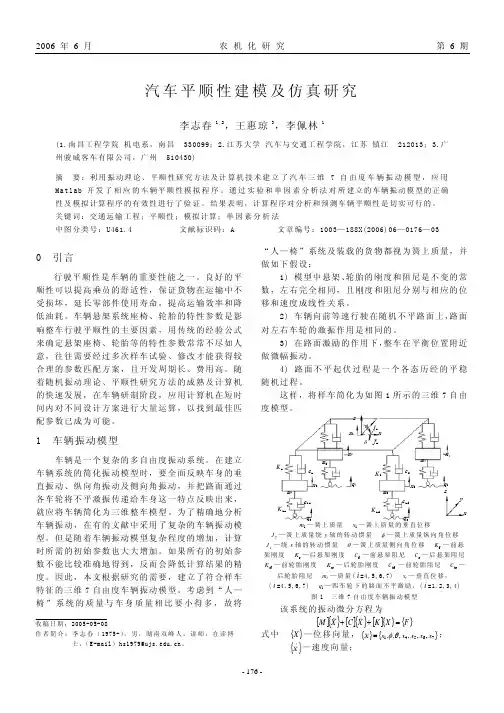
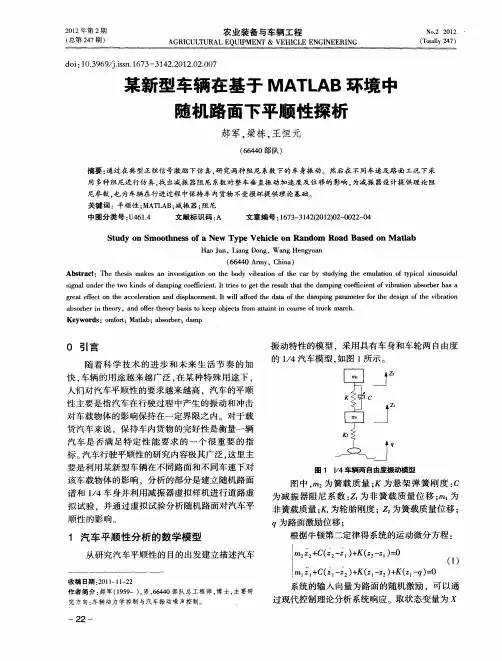
这样,将样车简化为如图 1 所示的三维 7 自由
度模型。
z
y
x1
φ Jyx
θ Jx
x7 m6
m4
x4
Kr
cr
Kf
cf
x6 m7
ctr
q4
x5
m5
ctf
q1 z
y
Ktr
Ktf
x
q3
q2
m1 — 簧 上 质 量 x1 — 簧 上 质 量 的 垂 直 位 移
Jy —簧上质量绕 y 轴的转动惯量 φ —簧上质量纵向角位移
Matlab 开发 了相应的车辆平顺性模拟程序。通过实验和单因素分析法对所建立的车辆振动模型的正确
性及模拟计算程序的有效性进行了验证。结果表明,计算程序对分析和预测车辆平顺性是切实可行的。
关键词:交通运输工程;平顺性;模拟计算;单因素分析法
中图分类号:U461.4
文献标识码:A
文章编号:1003—188X(2006)06—0176—03
0.38
16.00
0.17
0.20
20.20
0.30
0.04
25.40
0.09
0.01
32.00
汽车平顺性教学仿真gui设计
其中Ts为车辆行驶时间,取 与输出量y,可得:
,结合式(6)
即:
整理得:
取
,
,
式(7)
式(8)
式(9) ,则式(9)变为:
式(10)
控制力u =—Kx ,K 由MatLab函数lqr [如式(11)]求 解,K 为反馈增益矩阵,S 为Riccati方程的代数解,E 为闭环系统特征值。
式(11)
2 功能模块介绍
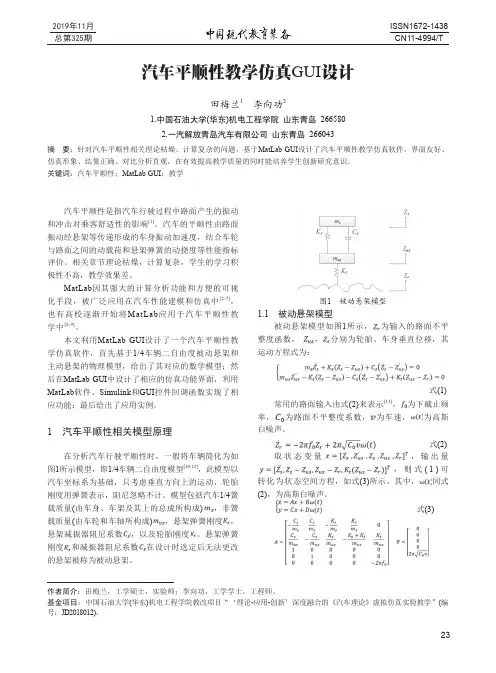
图1 被动悬架模型
1.1 被动悬架模型
被动悬架模型如图1所示, 为输入的路面不平 整度函数, , 分别为轮胎、车身垂直位移,其
运动方程式为:
式(1) 常用的路面输入由式(2)来表示[13], 为下截止频 率, 为路面不平整度系数, 为车速, 为高斯 白噪声。
取状态变量
式(2) ,输出量
,则式(1)可 转化为状态空间方程,如式(3)所示。其中, 同式
将性能指标均方根值比较模块的数据整理放到表
3中,从计算结果可知,主动悬架相对于被动悬架而
言,对汽车平顺性有明显的改善效果,从对比分析模
块的各图中也能直观观察到主动悬架的各性能指标的
汽车平顺性是指汽车行驶过程中路面产生的振动 和冲击对乘客舒适性的影响[1]。汽车的平顺性由路面 振动经悬架等传递形成的车身振动加速度,结合车轮 与路面之间的动载荷和悬架弹簧的动挠度等性能指标 评价。相关章节理论枯燥,计算复杂,学生的学习积 极性不高,教学效果差。
MatLab因其强大的计算分析功能和方便的可视 化手段,被广泛应用在汽车性能建模和仿真中[2-7], 也有高校逐渐开始将MatLab应用于汽车平顺性教 学中[ 。 8,9]
(2),为高斯白噪声。
式(3)
作者简介:田梅兰,工学硕士,实验师;李向功,工学学士,工程师。 基金项目:中国石油大学(华东)机电工程学院教改项目“‘理论-应用-创新’深度融合的《汽车理论》虚拟仿真实验教学”(编 号:JD2018012)。
一种基于MATLAB的汽车平顺性模拟仿真分析方法
一种基于MATLAB的汽车平顺性模拟仿真分析方法
朱荣;朱世彬;陈文丰
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2015(53)7
【摘要】为了快速、准确地模拟汽车平顺性,介绍了一种基于MATLAB的乘用车平顺性模拟仿真方法.通过建立整车的平顺性数学模型.在MATLAB软件的图形用户界面(GUI)开发环境下,用M语言编写程序,获得汽车平顺性模拟仿真系统.用户只需要在系统界面下输入对应的参数,便能自动获取平顺性的各种预设指标.基于此种仿真方法不仅能够消除实际道路试验中道路、气候等因素对汽车平顺性能测定的影响,而且具有方便快捷、重复使用等优点.
【总页数】5页(P61-64,70)
【作者】朱荣;朱世彬;陈文丰
【作者单位】710064陕西省西安市长安大学汽车学院;710064陕西省西安市长安大学汽车学院;710064陕西省西安市长安大学汽车学院
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.基于ADAMS与MATLAB联合的载货汽车平顺性仿真方法研究 [J], 陈志宁;刘夫云;邓聚才
2.基于ANSYS与MATLAB的汽车平顺性研究 [J], 杨晓翔;陈丽静
3.基于MATLAB汽车悬架优化设计及平顺性分析 [J], 秦玉英;郭翔翔;陈双
4.基于MATLAB的汽车动力性模拟仿真方法 [J], 朱荣;陈文丰;杜宁宁
5.基于MATLAB的轮毂电机驱动电动汽车的平顺性研究 [J], Zhang Liping;Li Yongkai;Li Zhengpeng
因版权原因,仅展示原文概要,查看原文内容请购买。
根据MATLAB的机动车减震系统仿真建模
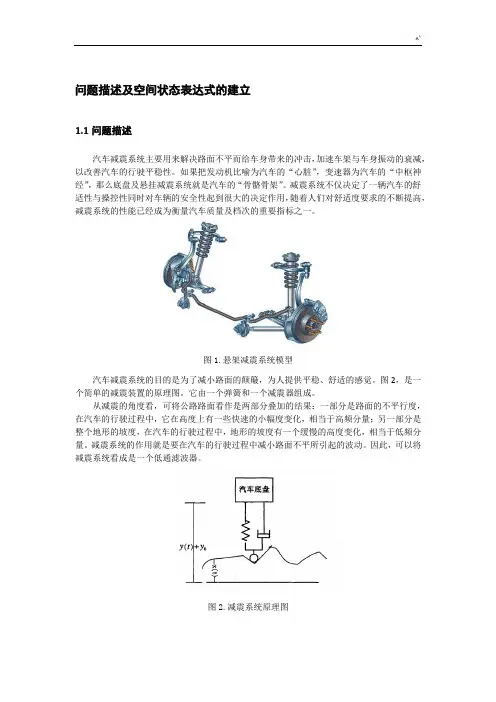
问题描述及空间状态表达式的建立1.1问题描述汽车减震系统主要用来解决路面不平而给车身带来的冲击,加速车架与车身振动的衰减,以改善汽车的行驶平稳性。
如果把发动机比喻为汽车的“心脏”,变速器为汽车的“中枢神经”,那么底盘及悬挂减震系统就是汽车的“骨骼骨架”。
减震系统不仅决定了一辆汽车的舒适性与操控性同时对车辆的安全性起到很大的决定作用,随着人们对舒适度要求的不断提高,减震系统的性能已经成为衡量汽车质量及档次的重要指标之一。
图1.悬架减震系统模型汽车减震系统的目的是为了减小路面的颠簸,为人提供平稳、舒适的感觉。
图2,是一个简单的减震装置的原理图。
它由一个弹簧和一个减震器组成。
从减震的角度看,可将公路路面看作是两部分叠加的结果:一部分是路面的不平行度,在汽车的行驶过程中,它在高度上有一些快速的小幅度变化,相当于高频分量;另一部分是整个地形的坡度,在汽车的行驶过程中,地形的坡度有一个缓慢的高度变化,相当于低频分量。
减震系统的作用就是要在汽车的行驶过程中减小路面不平所引起的波动。
因此,可以将减震系统看成是一个低通滤波器。
图2.减震系统原理图1.2空间状态表达式的建立对该系统进行受力分析得出制约底盘运动的微分方程(数学模型)是:22()()()()()d y t dy t dx t M b ky t kx t b dt dt dt++=+其中,M 为汽车底盘的承重质量,k 为弹簧的弹性系数,b 为阻尼器的阻尼系数。
将其转化为系统传递函数:222()()()2()n n n n s H s s s ωεωεωω+=++其中,n ω为无阻尼固有频率,ε为阻尼系数。
并且,n ω=2n b Mξω=通过查阅相关资料,我们知道,汽车减震系统阻尼系数ε=0.2~0.4,而我们希望n ω越大越好。
在下面的计算中,我们规定n ω=6,ε=0.2。
所以,系统传递函数,可以转化为:2() 2.436() 2.436Y s s U s s s +=++ 根据现代控制理论知识,结合MATLAB 工具,将传递函数转化为状态空间矩阵和输出矩阵表示。
汽车操纵稳定性和平顺性的仿真研究
科研训练文献阅读综述题目:汽车操纵稳定性和平顺性的仿真研究姓名:学号:专业:班级:指导老师:时间:第一章整车操纵稳定性试验仿真分析本章节,在前悬架优化的基础上建立整车模型。
整车进行转向回正试验、转向轻便性试验、稳态回转试验,并根据国标计分评价。
1.1转向回正试验仿真分析转向回正试验是研究汽车瞬态响应特性的一种重要试验方法,尤其是研究汽车能否恢复直线行驶能力的一种重要试验方法,汽车的转向回正表达了汽车的自由控制运动特性,其实质是一种力阶跃输入试验。
国标 GB/T6323.4-94对试验做出了相关规定。
低速回正试验在半径为15m圆周上侧向加速度达到4m/s^2,,然后然放松转向盘,记录汽车的状态。
由于该重货车最高车速为90km/h,按照国标规定不需要进行高速转向回正试验。
对于侧向加速度达不到4士0.2m/s^2的汽车,按试验汽车所能达到的最高侧向加速度进行试验。
试验按向左与向右两个方向进行,每个方向三次[1].1.1.1仿真曲线:仿真中设定圆弧半径为15m,要达到4士0.2m/s的侧向加速度车速必须大于7.746m/s^2。
左转低速转向回正试验具体仿真结果如下(右转仿真结果略):1.1.2仿真结论:对于虚拟样车系统,回正特性的主要参数根据国标GB/T6323.4-94规定的转向回正试验要求计算,结果见表6-1。
1.2转向瞬态响应试验(转向盘转角阶跃输入)仿真分析瞬态转向特性是指汽车在受到外界扰动下,达到稳态状态前表现出来的特性,瞬态转向特性是汽车最重要的性能之一,是评价汽车高速行驶安全性的一个重要指标。
1.2.1试验方法:具体做法参照国标GB/T6323.2-1994。
试验车速按被测汽车最高车速的70%并四舍五入为10的整数倍确定。
该重型货车最高车速为90KM/h,所以试验车速取6Okm/h。
试验中转向盘转角的预选位置(输入角),按稳态侧向加速度值1-3m/s^2确定,从侧向加速度为lm/s^2做起,每间隔0.5m/m^2进行一次试验。
某新型车辆在基于MATLAB环境中随机路面下平顺性探析
s n lu d rt e t id fd mp n o f c e t I tist e h e u tt a h a i g c e c e to i r t n a s r e a i a n e h g wo k n so a i g c e i n . t r o g t e r s l h t e d mp n o f i n f b a i b o b rh sa i e t t i v o
d i1 . 6/.s.6 3 3 4 . 1 . . 7 o :03 9j s 1 7 — 122 20 0 9 in 0 2 0
某新型车辆 在基于 MA L T AB环境 中 随机路面 下平顺性探析
郝军 , 梁栋 , 恒元 王
( 64 6 4 0部队 ) 摘要 : 通过在 典型正弦信号激励 下仿真 , 究两种 阻尼 系数下的车 身振动 。然后 在不 同车速及路 面.  ̄T采 研 S -
0 引 言
随 着 科 学 技 术 的进 步 和 未 来 生 活 节 奏 的 加 快 , 辆 的 用 途越 来 越 广 泛 , 某 种特 殊 用 途 下 , 车 在
振 动 特性 的模 型 ,采 用具 有 车 身和 车 轮两 自由度 的 14汽 车模 型 , 图 1 示 。 / 如 所
人们对汽车平顺性 的要求越来越高 ,汽车的平顺
( 64 r ,C ia 6 4 0A my hn )
Ab t a t h h ss ma e n iv si ai n o h o y vb a i n o h a y su yn h mu a in o y i a i u od l sr c :T e t e i k s a n e t t n t e b d i r t f te c r b t d i g t e e lt ft p c lsn s i a g o o o
基于ANSYS与MATLAB的汽车平顺性研究
基于ANSYS与MATLAB的汽车平顺性研究杨晓翔;陈丽静【摘要】ANSYS is used to statical y analyze 195/65R15 radial tires. This paper draws a law that the tire's nonlinear radial stiffness changes with the inflation pressure variation. And the kinematics simulation of vehicle suspension and the random road spectrum are made by usingmatlab/simulink. The results show that the tire inflation pressure, vehicle speed and pavement level have a greater impact on the vehicle ride comfort.%运用ANSYS对195/65R15子午线汽车轮胎进行静态分析,得出轮胎非线性径向刚度随充气内压的变化规律,并采用Matlab/Simulink建立随机路面谱,对带该轮胎的汽车悬架进行运动特性仿真,结果表明轮胎的充气压力与汽车行驶速度、路面等级对汽车的平顺性有较大的影响。
【期刊名称】《机械制造与自动化》【年(卷),期】2015(000)001【总页数】3页(P113-115)【关键词】汽车;非线性动刚度;平顺性;充气压力;随机路面谱【作者】杨晓翔;陈丽静【作者单位】福州大学机械工程及自动化学院,福建福州350108;福州大学机械工程及自动化学院,福建福州350108【正文语种】中文【中图分类】U469;TP391.9对于任何行驶中的车辆来讲,它必然受到空气作用力和地面的作用力;而地面作用力比空气作用力的影响更为重要。
基于MATLAB/Simulink的汽车平顺性的仿真模型(可编辑)
基于MATLAB/Simulink的汽车平顺性的仿真模型摘要本文在分析平顺性的研究意义和研究内容的基础上,以数学仿真原理为理论基础,建立了以某经济型轿车为原型的整车八自由度汽车模型拉格朗日方程,并应用仿真软件MATLAB/Simulink建立了汽车平顺性的仿真模型。
按照国家标准模拟了不同车速下的汽车试验,得出了平顺性仿真在不同车速下时间域和频率域的仿真结果。
本文还参考了实车的平顺性试验,该试验参照国标GB/T4970?1996执行。
在国家B级路面上以不同车速对驾驶员座椅、副驾驶员座椅和后排左侧座椅的垂直加速度信号进行了测量,得出了平顺性试验在时间域和频率域的结果。
在汽车平顺性仿真与试验的基础上,文中对处理后的数据结果进行了比较分析,对试验所用汽车的平顺性作出了评价,给出了仿真与试验的相应结论。
关键词:平顺性,八自由度建模,路谱,MATLAB/SimulinkAbstractThis paper analyzes the significance of ride comfort and contents of research based on the principle of mathematical simulation based on the theory established by an economy car for the prototype vehicle eight degrees of freedom vehicle model Lagrange equation, and applying simulation software MATLAB / Simulink to establish a simulation model ofvehicle ride comfort. Simulated in accordance with national standards of vehicles under different speed test results, the simulation ride at different speeds time domain and frequency domain simulation results This article also during the actual car test ride, test the light of the implementation of national standard GB/T4970-1996. B-class roads in the country at different speeds on the driver's seat, co-pilot seat and left rear seat of the vertical acceleration signal was measured, obtained test ride in the time domain and frequency domain results. In the car ride simulation and experiment based on the text of the processed data results were compared, the test used in ride comfort has been evaluated, the simulation and testing the corresponding conclusionsKey words: Comfort,Eight degrees of freedom model, Road spectrum, MATLAB/Simulink 目录前言 11绪论 21.1汽车平顺性研究的意义21.2汽车平顺性研究的主要内容 21.3汽车行驶平顺性研究发展概况 42汽车行驶平顺性的评价 62.1行驶平顺性评价的研究62.2人体对振动的反应 62.3平顺性指标评价方法72.3.1ISO 2631标准评价法72.3.2吸收功率法112.4平顺性评价流程113随机路面模型的研究 133.1随机路面模型133.1.1路面不平度的概述133.1.2路面不平度的表达133.1.3时域模型143.1.4时域响应153.2建立随机路面模型 153.2.1汽车前轮所受路面随机激励153.2.2前后轮滞后输入的处理164汽车平顺性模型的建立及仿真184.1建模基本原理与要求184.1.1建模基本要求184.1.2建模基本原理194.2 汽车平顺性建模194.2.1 八自由度整车力学模型的建立204.2.2 数学模型的建立214.2.3 汽车座椅的布置254.2.4 汽车八自由度Simulink仿真模型的建立26 4.3整车平顺性仿真284.3.1仿真参数的选取 284.3.2 50km/h车速下汽车平顺性仿真结果304.3.3 60km/h车速下汽车平顺性仿真结果314.3.4 70km/h车速下汽车平顺性仿真结果325整车平顺性试验与结果分析335.1 平顺性试验原理及试验过程335.2 仿真与试验结果的数据处理345.3 仿真与试验结果的时域分析365.4 仿真与试验结果的频域分析37结论38致谢39参考文献40前言汽车平顺性主要是指保持汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定界限之内,对载货汽车还包括保持货物完好的性能,它是现代高速汽车的主要性能之一。
基于MATLAB和ADAMS的汽车ESP联合仿真
摘要汽车电子稳定程序系统ESP是一种新型主动安全控制系统,也是最近几年汽车安全领域研究的热点。
这种新型系统能够根据汽车驾驶员的意图和路面状况主动的控制汽车的运动,避免危险状况的发生,提高行驶安全性。
本文首先对ESP的稳定控制原理进行了分析,并利用Matlab/simulink 建立了汽车二自由度模型,得到汽车在行驶中理论的横摆角速度和质心侧偏角,然后在Adams/Car建立了汽车整车模型,并对该模型进行了仿真试验,以便为后续的实验研究提供准确的模型。
在控制方面选用PID控制,以横摆角速度和质心侧偏角的误差作为输入,把调整汽车稳定所需要的力矩作为输出。
用Adams/Control将汽车模型和Simulink连接后,又对整车车进行了转向盘阶跃模拟试验,试验结果表明配有ESP系统的汽车有比较好的路径保持能力,转弯半径明显减小,且横摆角速度和质心侧偏角都能得到较好的控制。
由此可以看出ESP确实能较好的改善汽车操纵稳定性和汽车行驶的安全性。
关键词:汽车;ESP;二自由度模型;PID控制;联合仿真。
参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参AbstractESP Electronic Stability Program system is a new active safety control system. In recent years it also became the hot field of automotive safety research. The new system based on the intention of driver can actively control and road conditions motorists sports car, to avoid dangerous situations and improve driving safety.The ESP stability control principle is analyzed at first,and the two degree of freedom model car is also established by Matlab / Simulink .From it getting the theory of yaw rate and lateral sideslip angle, then Adams / car automobile model was established. At last a simulation experiment is made on this model in order to provide an accurate model for the subsequent experimental study. As control ,the PID control is used and the yaw rate and sideslip angle error are used as input, the torque required to adjust the car stable as output.With Adams / Control after the car model and Simulink connection, and carried out on the vehicle steering wheel vehicle simulation step.The results showed that the car is equipped with ESP systems ability to maintain a relatively good path, turning radius is significantly reduced, and the yaw rate and sideslip angle can be better controlled. It can be seen that ESP really can better improve vehicle handling and stability and safety of cars.Key words: Vehicle; ESP; Two degrees of freedom model ; PID control;C o-simulation;参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参目录摘要 (I)Abstract (II)1 绪论 (1)1.1 研究ESP的背景和意义 (1)1.2 ESP系统的关键技术 (2)1.3 国内外ESP 系统研究 (3)1.4本文研究的主要内容 (8)2 ESP系统的基本理论 (9)2.1汽车失稳的原因分析 (9)2.2 ESP系统的介绍 (11)2.3 ESP系统的控制策略分析 (13)2.4本章小结 (15)3 汽车模型的建立 (16)3.1 相关软件的介绍 (16)3.2 影响汽车稳定性的参数 (21)3.3 汽车参考模型的建立 (22)3.4 Adams/Car汽车模型的建立 (24)3.5整车模型的检验 (28)3.6本章小结 (30)4 基于汽车ESP控制系统的设计 (31)4.1 ESP系统控制系统的分析 (32)4.2 PID控制系统 (34)4.3 本章小结 (41)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参5 基于Adams和Matlab 的汽车ESP联合仿真 (42)5.1联合仿真的简介 (42)5.2导入Adams子系统模型 (43)5.3 PID控制的ESP仿真模型的建立与分析 (46)5.5 本章小结 (49)6 结论与展望 (50)参考文献 (52)致谢 (54)附录 (55)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参1 绪论1.1 研究ESP的背景和意义在现代社会中,汽车在我们的日常生活中充当着重要角色,成为人们日常工作生活不可或缺的工具,相应的汽车的安全性也越来越受到人们的关注。
基于MATLAB的汽车仿真
东北大学仿真实验:基于simulink的汽车仿真姓名:张冬磊________班级:自动化1309班____学号:20137675_______日期:2015.11.3______离合器充油特性对车辆起步性能的影响一、实验目的基于simulink仿真系统建立车辆起步过程的仿真,仿真模型包括,发动机、主离合器、车体、路面阻力等。
通过仿真结果分析,讨论离合器充油特性对车辆起步性能的影响。
起步性能是车辆性能的一个重要指标,仿真是研究其动态过程的重要方法.研究车辆动力换挡离合器充油过程动态特性及其影响因素.建立充油过程动态数学模型并进行仿真,形成一个功能独立的模型部件,再将各个模型部件组合在一起,从而建立起系统模型。
二、实验工具MatlabSimulink三、实验步骤1、建立车辆起步的数学模型2、建立发动机的简化模型3、建立离合器的简化模型4、建立车体动力学简化模型5、建立地面阻力简化模型6、建立车辆起步过程模型7、建立仿真实例8、实验结论四、实验内容1、车辆起步过程的数学模型车辆起步过程复杂,涉及的部件很多,是一个多质量,多阻尼的非线性系统,根据模块化建模的思想,将一个大的复杂系统分解成若干个子系统,再根据研究的对象和边界条件确定各个子系统之间的关系。
对于车辆起步过程可以根据车辆各部件的功能和联系分成发动机、主离合器、变速器、车体和路面子系统等。
2、发动机的简化模型发动机的工作过程复杂,动态过程难以用一个数学方程式来表达,一般用实验的方法得到发动机在不同油门开度,不同转速下的转矩数据,再根据实验的数据,用数学插值的方法得到发动机的稳态模型形成一个转速,油门开度和发动机输出转矩的查询表,仿真时只要给定油门开度和发动机的转速就可以通过查表得出相应的发动机的转矩值,但查表得出的是发动机的稳定值,发动机的动态模型可以简化为一个扭矩发生器和一个转动惯量,其动力学方程式简化为:=-(1)式中为发动机的等效转动惯量,为发动机的输出扭矩,为离合器传递的扭矩,为发动机的输出轴角速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)
基于MATLAB 的汽车平顺性的建模与仿真
车辆工程专硕1601 Z1604050 晨
1. 数学建模过程 1.1建立系统微分方程
如下图所示,为车身与车轮二自由度振动系统模型:
图中,m2为悬挂质量(车身质量);m1为非悬挂质量(车轮质量);K 为弹簧刚度;C 为减振器阻尼系数;Kt 为轮胎刚度;z1为车轮垂直位移;z2为车身垂直位移;q 为路面不平度。
车轮与车身垂直位移坐标为z1、z2,坐标原点选在各自的平衡位置,其运动方程为:
222121
()()0m z C z z K z z +-+-=1112121()()()0t m z C z z K z z K z q +-+-+-=
(2) (3)
(4)
(5)
(6)
1.2双质量系统的传递特性
先求双质量系统的频率响应函数,将有关各复振幅代入,得:
令:
232t A m j C K K ωω=-+++
由式(2)得z 2-z 1的频率响应函数:
将式(4)代入式(3)得z 1-q 的频率响应函数:
式中:
下面综合分析车身与车轮双质量系统的传递特性。
车身位移z 2对路面位移q 的频率响应函数,由式(4)及(5)两个环节的频率响应函数相乘得到:
2221()()
z m j C K z j C K ωωω-++=+2111()()t t
z m j C K K z j C K qK ωωω-+++=++1A j C K
ω=+K
C j m A ++-=ωω222212
122
z A j C K z m K j C A ωωω+==-++2321
N A A A
=-212211=t t
A K A K z z z A q z q A N N
==
1.3车身加速度、悬架弹簧动挠度和车轮相对动载的幅频特性 1.车身加速度对路面不平度的频率特性:
2.相对动载对路面不平度的频率特性 车轮动载荷为:
车轮静载荷为:
则车轮与路面相对动载为:
车轮与路面间相对动载与路面不平度之间的传递函数为:
2222()()()()()
Z q
z z H q q ωωωωωω-==-1122
d F m z m z =+12()G m m g
=+2
12
11221
2121
()(1d m z z F m z m z m m G m m g g
m ++==
++122
21/2()()()(1d d F G q
z z m F q q m H m Gq g ωωω
ω-+
==-+
3.悬架动挠度对路面不平度的频率特性
悬架动挠度为:
悬架动挠度与路面不平度之间的传递函数为:
2. 仿真过程
通过建模,我们已经得到了各所需的传递函数。
下面要利用MATLAB 的M 文件进行仿真。
2.1公式的进一步推导
在公式(7)中,我们需要得到的是传递函数的分子和分母表达式,这样可以通过插值的方法计算传递函数,并以此计算出幅频特性。
经进一步推导后我们可得公式(7)的分子为:
()3
2
[]t j C K K ωω-⨯
分母为:
2121
d f z z z z q q q q
-==-21
()()()d d f q
f z z H q q q
ωωω-==-
同理,对公式(11)、(13)进行推导得: 公式(11)分子为:
4
3
2
22211
[()()()]t m m m j C C K K K m m ωωω++-+⨯
分母为:
2
1
+m m ⨯⨯(1)g N
公式(13)分子为:
2
2t m K ω
分母为:
N
2.2M 文件中代码的编写
得到了所有传递函数的分子、分母,下面编写代码: 1.一些系统参数的输入
2.传递函数分子、分母的构建
2
321N A A A =-
3.传递响应函数的构建及频响输出车身加速度对路面不平度响应特性:
悬架动挠度对路面不平度响应特性:
相对动载对路面不平度响应特性:
2.3图形输出
对比汽车理论教材上的容,作出的曲线基本符合。