TKKL-4型实验箱实验指导书_实验一
TKKL-4型实验箱实验指导书_实验一
基于THKKL-4型控制理论·计算机控制技术实验箱自动控制原理实验指导书浙江天煌科技实业有限公司编写张立庞亚丽改编吉林大学珠海学院电子信息系2009-09-01目录实验一典型系统动态和稳态性能分析实验二线性定常系统的瞬态响应和稳定性分析实验三控制系统的频率特性分析实验四自动控制系统的校正实验五时域分析法MATLAB仿真实验实验六根轨迹分析法MATLAB仿真实验实验七频率特性分析法MATLAB仿真实验实验一 典型系统动态和稳态性能分析一、实验目的1.掌握控制系统中各典型环节的有源电路模拟设计、参数计算方法。
2.掌握通过测量典型环节的阶跃响应曲线来测试系统动态和稳态性能指标的技能。
3.深入了解和体验系统参数对系统性能的影响。
二、实验前准备1. 基于集成运放的基本运算电路基本运算电路主要指比例、加、减、乘、除、积分、微分、对数、指数等电路。
比例运算电路是其它基本运算电路的基础。
本实验主要用到比例、加、减、积分、微分等运算电路。
(1)比例运算电路有反向输入、同相输入、差分输入三种基本形式。
图2.1是反向比例运算电路。
根据虚断原则,知: i i -+==0因为i +=0,可知u +=0根据虚短原则,有 u u +-==0则有f i of f R R u u u R R R R -=+=++1110因此, f o i R u u R =-1该电路的输出电压与输入电压幅值成正比,相位相差0180,放大倍数f oufi R u A u R ==-1。
当f R R =1时,此电路为单位增益倒相器,也称反相器。
图2.2是同相比例运算电路。
根据虚短和虚断原则,有如下关系: i u u +=o fR u u R R -=+11u u +-=iu ouR 图2.1 反相比例运算电路iu ou f图2.2 同相比例运算电路ff o i i R R R u u u R R ⎛⎫+==+ ⎪ ⎪⎝⎭1111f f ouf i R R R u A u R R ⎛⎫+===+ ⎪ ⎪⎝⎭1111 当f R =0时,有o i u u =,此时称该电路为电压跟随器。
箱式实验指导书

传感器与检测技术实验指导书物电学院实验室传感器与检测技术实验I 物电学院实验室目录实验一应变片单臂、半桥、全桥特性比较试验 (1)实验二电容式传感器的测位移实验 (7)实验三差动变压器的性能实验 (12)实验四压电式传感器测振动实验 (15)实验五线性霍尔式传感器位移特性实验 (17)实验六集成温度传感器(AD590)温度特性实验 (19)实验七K型热电偶测温特性实验 (20)实验八NTC热敏电阻温度特性实验 (21)实验九光纤位移传感器测位移特性实验 (22)实验十气敏传感器实验 (25)实验十一湿敏传感器实验 (26)实验一应变片单臂、半桥、全桥特性比较试验一、实验目的:1.了解金属箔式应变片的应变效应,单臂电桥、半桥、全桥电路工作原理和性能。
2.比较单臂电桥与半桥、全桥测量电路的不同性能,了解全桥测量电路的优点。
3.比较单臂电桥、半桥、全桥输出时的灵敏度和非线性度,得出相应的结论。
二、基本原理:电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为:ΔR/R=Kε,式中ΔR/R为电阻丝电阻相对变化,K为应变灵敏系数,ε=Δl/l为电阻丝长度相对变化。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位受力状态变化,电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
(a) 单臂(b)半桥(c)全桥图1—1 应变片测量电路对单臂电桥(a)输出电压U oa= EKε/4。
对于半桥电路(b),不同受力方向的两只应变片接入电桥作为邻边,电桥输出灵敏度提高,非线性得到改善,当应变片阻值和应变量相同时,半桥路输出电压U Ob=EKε/2。
在全桥测量电路中,将受力性质相同的两应变片接入电桥对边,当应变片初始阻值R1=R2=R3=R4,且其变化值ΔR1=ΔR2=ΔR3=ΔR4时,全桥路输出电压U0c=KEε,它的输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到改善。
实验四轴系结构设计与分析实验

实验四轴系结构设计与分析实验实验1轴系结构设计实验指导书一、实验目的熟悉并掌握轴系结构设计中有关轴的结构设计、滚动轴承组合设计的基本方法。
二、实验设备1、创意组合式轴系结构设计与分析实验箱。
实验箱由8类40种168件零件组成,能方便的组合出数十种轴系结构方案。
具有开设轴系结构设计和轴系结构分析两大项实验功能,对培养和提高学生的机械设计能力、机械结构能力及机构创新能力的具有明显的效果。
2、绘图工具铅笔、三角板等。
三、实验内容与要求1、指导教师根据下表可以选择性安排每组的实验内容( 实验题号)或学生自行确定实验方案。
2、进行轴的结构设计与滚动轴承组合设计。
每组学生根据实验题号的要求,进行轴系结构设计,解决轴承类型选择,轴上零件定位固定轴承安装与调节、润滑及密封等问题。
3、绘制轴系结构装配图。
4、每人编写实验报告一份。
四、实验步骤1、明确实验内容,理解设计要求。
2、复习有关轴的结构设计与轴承组合设计的内容与方法(参看教材有关章节)。
3、构思轴系结构方案(1)根据齿轮类型选择滚动轴承型号。
(2)确定支承轴向固定方式(两端固定;一端固定、一端游动)。
(3)根据齿轮圆周速度(高、中、低)确定轴承润滑方式(脂润滑、油润滑)。
(4)选择轴承端盖形式(凸缘式、嵌入式)并考虑透盖处密封方式(毡圈、皮碗、油沟等)。
(5)考虑轴上零件的定位与固定,轴承间隙调整等问题。
(6)绘制轴系结构方案示意图。
4、组装轴系部件根据轴系结构方案,从实验箱中选取合适零件并组装成轴系部件、检查所设计组装的轴系结构是否正确。
5、绘制轴系结构草图。
6、将所有零件放入实验箱内的规定位置。
7、写出实验报告。
班级:日期:实验目的实验内容实验题号已知条件实验结果轴系结构装配图(附3号图)轴系结构设计说明(说明轴上零件的定位固定,滚动轴承的安装、调整、润滑与密封方法)实验2轴系结构分析实验指导书实验目的熟悉并掌握轴、轴上零件的结构形状及功用、工艺要求和装配关系;熟悉并掌握轴及轴上零件的定位与固定方法;了解轴承的类型、布置、安装及调整方法,以及润滑和密封方式。
TKKL-4实验指导书(新版学生用)
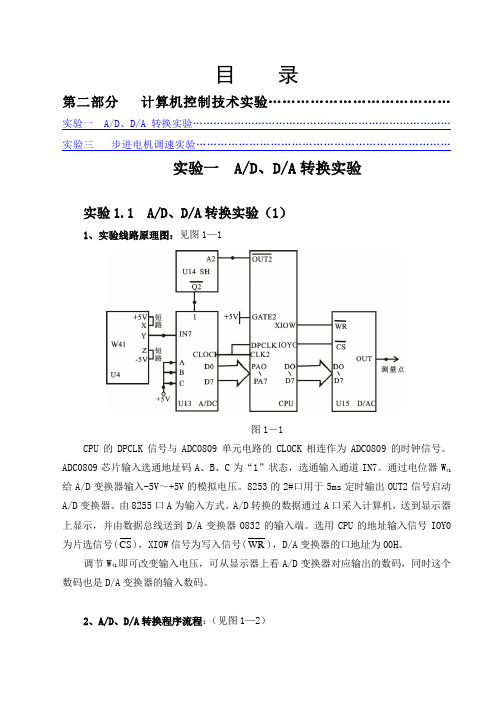
目录第二部分计算机控制技术实验…………………………………实验一 A/D、D/A转换实验…………………………………………………………………实验三步进电机调速实验………………………………………………………………实验一 A/D、D/A转换实验实验1.1 A/D、D/A转换实验(1)1、实验线路原理图:见图1—1图1-1CPU的DPCLK信号与ADC0809单元电路的CLOCK相连作为ADC0809的时钟信号。
ADC0809芯片输入选通地址码A、B、C为“1”状态,选通输入通道IN7。
通过电位器W41给A/D变换器输入-5V~+5V的模拟电压。
8253的2#口用于5ms定时输出OUT2信号启动A/D变换器。
由8255口A为输入方式。
A/D转换的数据通过A口采入计算机,送到显示器上显示,并由数据总线送到D/A变换器0832的输入端。
选用CPU的地址输入信号IOY0为片选信号(CS),XIOW信号为写入信号(WR),D/A变换器的口地址为00H。
调节W41即可改变输入电压,可从显示器上看A/D变换器对应输出的数码,同时这个数码也是D/A变换器的输入数码。
2、A/D、D/A转换程序流程:(见图1—2)图1-23、实验内容及步骤(1)按图1—1接线。
用“短路块”分别将U1单元中的ST与+5V短接;U4单元中的X 与+5V,Z与-5V短接。
其它画“●”的线需自行连接。
连接好后,接通电源,然后按使用说明中对U15 D/A转换单元进行调零。
(2)将W41输出调至-5V,执行监控中的程序(G=F000:1100↘)。
如果程序正确执行,将在显示器上显示“00”。
(3)将W41依次调节,用U16交/直流数字电压表分别检测A/D的输入电压和D/A的输1。
4、按图1—3改接U4输出Y至U13A/D转换单元输入IN7的连接,其它线路同图1—1图1-35、用U16交/直流数字电压表监测A/D的输入电压,在OV附近连续调节A/D的输入电压,观察整理化误差和量化单位。
控制工程实验指导书TkkL
实验六典型环节及其阶跃响应一实验目的(1)熟悉超低频扫描示波器的使用方法(2)掌握用运放组成控制系统典型环节的电子模拟电路(3)测量典型环节的阶跃响应曲线(4)通过本实验了解典型环节中参数的变化对输出动态性能的影响二实验仪器(1) 控制理论电子模拟实验箱一台。
(2) 双踪低频慢扫描示波器一台。
(3) 万用表一只。
三实验内容(1)设计并组建各典型环节的模拟电路;(2)测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。
四实验步骤以运算放大器为核心元件,由其不同的输入R-C网络和反馈R-C网络构成控制系统的各种典型环节。
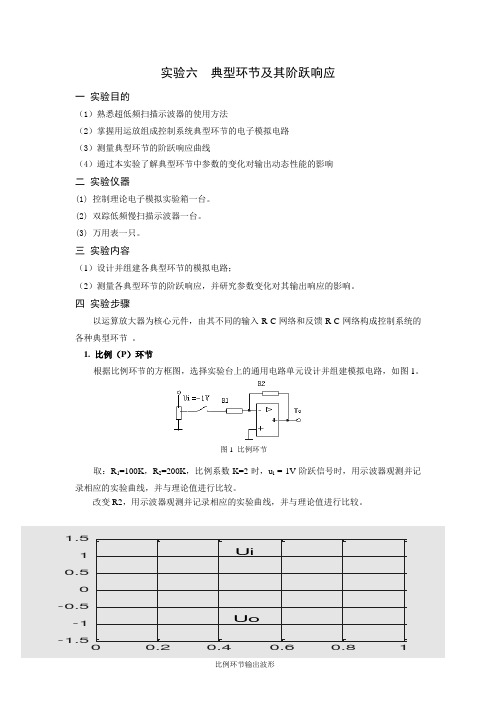
1. 比例(P)环节根据比例环节的方框图,选择实验台上的通用电路单元设计并组建模拟电路,如图1。
图1 比例环节取:R1=100K,R2=200K,比例系数K=2时,u i =-1V阶跃信号时,用示波器观测并记录相应的实验曲线,并与理论值进行比较。
改变R2,用示波器观测并记录相应的实验曲线,并与理论值进行比较。
2. 积分(I )环节根据积分环节的方框图,选择实验台上的通用电路单元设计并组建模拟电路,如图2。
积分时间常数T=RC ,取R 1=200K ,C=1uF ,(T=R 1C=200K ×1uF=0.2s);当u i =-1V 阶跃信号时,用示波器观测并记录相应T 值时的输出响应曲线,并与理论值进行比较。
改变C ,用示波器观测并记录相应的实验曲线,并与理论值进行比较。
3. 比例积分(PI)环节据比例积分环节的方框图,选择实验台上的通用电路单元设计并组建模拟电路,如图3。
212211()(1)(1)R G s K R R CT =+=+(K=R 2/R 1, T 2=R 2C )图2 积分环节图3 比例积分环节取:R 1=100K ,R 2=200K ,C=1uF (K= R 2/ R 1=2 ,T=R 2C=200K ×1uF=0.2S)。
通过改变R 2、R 1、C 的值可改变比例积分环节的放大系数K 和积分时间常数T 。
《自动控制原理实验》教学大纲.doc

《自动控制原理实验》教学大纲(课程代码:09121209)一、课程基本情况(一)课程名称:自动控制原理Automatic Control Theory(二)课程类别:专业基础课(三)课程性质:独立设课(四)学时、学分实验学时与学分:18学时、0.5学分(五)适用专业:电气工程与自动化、电气自动化技术、物理(六)大纲执笔:高联学(七)大纲审批:胡波李卫兵(八)制定(修订)时间:2008年8月二、实验教学目的与基本要求自动控制原理实验课程是一门理论验证型实验课程,结合自动控制理论课开设了一系列相应的实验,使学生理论与实践结合,更好的掌握控制理论。
通过实验,学生可以了解典型环节的特性,模拟方法及控制系统分析与校正方法。
三、实验内容与基本要求(二)实验内容及要求实验一控制系统典型环节的模拟内容:1.分别画出比例、惯性、积分、微分和震荡环节的模拟电路图;2.按下列各典型环节的传递函数,调节相应的模拟电路的参数,观察并记录其单位阶跃响应波形。
%1比例环节:%1积分环节:%1比例微分环节:%1惯性环节:%1比例积分环节:%1振荡环节:要求:1•熟悉超低频扫描示波器的使用方法。
2.掌握用运放组成控制系统典型环节的模拟电路。
3.测量典型环节的阶跃响应曲线。
4.通过实验了解典型环节参数的变化对输出动态性能的影响。
仪器:实验二一阶系统的时域响应及参数测定内容:1.一阶系统模拟电路图;2.一阶系统原理。
要求:1•观察一阶系统在单位阶跃和斜坡输入信号作用下的瞬态响应;实验二二阶系统的瞬态响应分析内容:1.二阶系统模拟电路;2.二阶系统原理及节跃响应区线。
要求:1.熟悉二阶模拟系统的组成;2.研究二阶系统分别工作在f = 1,0 < f < 1,玮口f〉1三种状态下的单位阶跃响应;3.增益K对二阶系统单位阶跃响应的超调量、峰值时间t p和调整时间t s;4.观察系统在不同K值时跟踪斜坡输入的稳态误差。
实验四PID控制器的动态特性内容:1.PD控制器;2.PI控制器;3.PID控制器关。
通信电子线路实验指导书(8个实验)
目录第一章高频IV型实验系统介绍 (1)一、高频IV型实验系统概述 (1)二、实验箱箱体结构 (1)三、箱体各组成部分说明 (2)四、高频模块介绍及实验说明 (4)五、高频电路实验要求 (4)第二章高频电路实验部分 (6)实验一单调谐回路谐振放大器 (6)实验二高频功率放大器 (10)实验三正弦波振荡器 (15)实验四振幅调制器 (21)实验五变容二极管调频器与相位鉴频器实验 (26)实验六混频器实验 (35)实验七检波器实验 (40)实验八调频发射、接收系统实验 (46)第一章 高频IV 型实验系统介绍一、高频IV 型实验系统概述本系统由实验箱体和外接实验模块两部分组成,其中外接模块采用插拔式结构设计,便于功能的扩展。
箱体上带有一个最高频率1MHz 的低频信号源、最高频率10MHz 的高频信号源、语音与麦克风模块和电源引出端,可进行部分数字电路和模拟电路实验。
而插上选配的高频模块,则可进行相应的高频实验。
二、实验箱箱体结构箱体平面结构如图1所示,主要由以下几部分组成:● 扬声器● 高频信号源、低频信号源区 ● 电源输出区扬声器 麦克风电源输出低频信号源外接实验模块高频信号源模块电源座图1 GP-IV 实验箱平面布局图●外接实验模块区●实验模块电源座区三、箱体各组成部分说明1.电源输出区电源接通时,电源输出区电源指示灯亮2.扬声器和麦克风其输入输出为汉字标示3.直流电压输出区:系统的电源为220V交流输入,5路直流输出:±5V/2A,±12V/0.5A,-8V/0.5A。
在本区内设有这5组直流电压的输出接口,以方便使用。
4.高频信号源、低频信号源高低频信号源均采用DDS芯片输出正弦波、三角波、方波三种波形的信号,峰峰值最大可达6V,同时幅值、偏移可调。
1).操作:●频率设置键“MENU”:第一次按下此键,数码管第一位开始闪烁,即进入了“频率设置”状态,此时功能键“NEXT”、“ADD”有效;第二次按下此键,退出“频率设置”状态,功能键“NEXT”“ADD”无效。
自动控制原理实验指导书
自动控制原理实验指导书内蒙古工业大学电力学院自动化系2012年10月目录实验一典型环节模拟及二阶系统的时域瞬态响应分析 (1)实验二频率特性的测试 (8)实验三控制系统的动态校正 (12)实验四非线性系统的相平面分析 (14)实验五状态反馈 (20)TKKL—1型控制理论电子模拟实验箱使用说明书 (23)实验一 典型环节模拟及二阶系统的时域瞬态响应分析一、实验目的1.通过搭建典型环节模拟电路,熟悉并掌握控制理论电子模拟实验箱的使用方法。
2.了解并掌握各典型环节的传递函数及其特性,掌握用运放搭建电子模拟线路实现典型环节的方法。
3.掌握二阶系统单位阶跃响应的特点,理解二阶系统参数变化对输出响应的影响。
二、实验仪器1.控制理论电子模拟实验箱一台;2.超低频扫描示波器一台;3.万用表一只。
三、实验原理1.典型环节的传递函数及其模拟电路图(1)比例环节图1-1 比例环节的方框图比例环节的方框图如图1-1所示,其传递函数为()()C s K R s (1-1)比例环节的模拟电路图如图1-2所示,其传递函数为21()()R C s R s R = (1-2) 比较式(1-1)和式(1-2),得:21R K R =图1-2 比例环节的模拟电路图当输入为单位阶跃信号,即()1()r t t =时,由式(1-1)得输出() (0)c t K t =≥,其输出波形如图1-3所示。
图1-3 比例环节的单位阶跃响应(2)积分环节图1-4 积分环节的方框图积分环节的方框图如图1-4所示,其传递函数为()1()C s R s Ts= (1-3)图1-5 积分环节的模拟电路图积分环节的模拟电路图如图1-5所示,其传递函数为()1()C s R s RCs= (1-4) 比较式(1-3)和式(1-4),得:T RC =当输入为单位阶跃信号,即()1()r t t =时,由式(1-3)得输出1()c t t T= 其输出波形如图1-6所示。
试验参考指导书范文
试验1 用发光管模拟广告牌一、试验目标1. 熟悉TKStdio集成开发环境, 学习程序编辑、编译调试, 下载运行方法。
2. 熟悉试验箱配置;3. 熟悉简单输出接口电路设计;4. 掌握控制应用程序设计。
二、试验内容一片74LS374锁存器扩展段码输出口, 端口地址为2FFFH, 用74LS244作驱动器, 8个阴极对接在输出线上, 即一位输出线上输出“1”, 控制发光二极管熄灭, 一位输出线上输出“0”, 控制发光二极管点亮。
《单片机试验箱操作手册》中8路发光二极管指示模块。
在8个发光二极管上模拟广告牌显示效果。
三、参考程序ORG 0000HAJMP STARTORG 0030HSTART: MOV DPTR,#TABLELOOP2: CLR AMOVC A,@A+DPTRPUSH DPLPUSH DPHCJNE A,#01H,LOOP1JMP STARTLOOP1: MOV DPTR,#2FFFHMOVX @DPTR,ALCALL DELAYPOP DPHPOP DPLINC DPTRJMP LOOP2DELAY: M OV R3,#20D1: MOV R4,#20D2: MOV R5,#248DJNZ R5,$DJNZ R4,D2DJNZ R3,D1RETTABLE: D B 0FEH,0FDH,0FBH,0F7HDB 0EFH,0DFH,0BFH,7FHDB 0FEH,0FDH,0FBH,0F7HDB 0EFH,0DFH,0BFH,7FHDB 7FH,0BFH,0DFH,0EFHDB 0F7H,0FBH,0FDH,0FEHDB 7FH,0BFH,0DFH,0EFHDB 0F7H,0FBH,0FDH,0FEHDB 00H, 0FFH,00H, 0FFH,01HEND四、试验要求和步骤1. 编辑、调试、运行参考程序, 观察显示结果, 了解程序怎样控制灯产生动态改变;2. 修改程序, 变换灯动态改变方法。
控制系统的频率特性分析实验报告
竭诚为您提供优质文档/双击可除控制系统的频率特性分析实验报告篇一:控制系统频率特性实验实验名称控制系统的频率特性实验序号3实验时间学生姓名学号专业班级年级指导教师实验成绩一、实验目的:研究控制系统的频率特性,及频率的变化对被控系统的影响。
二、实验条件:1、台式计算机2、控制理论&计算机控制技术实验箱ThKKL-4系列3、ThKKL仿真软件三、实验原理和内容:1.被测系统的方块图及原理被测系统的方块图及原理:图3—1被测系统方块图系统(或环节)的频率特性g(jω)是一个复变量,可以表示成以角频率ω为参数的幅值和相角。
本实验应用频率特性测试仪测量系统或环节的频率特性。
图4—1所示系统的开环频率特性为:采用对数幅频特性和相频特性表示,则式(3—2)表示为:将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化,并施加于被测系统的输入端[r(t)],然后分别测量相应的反馈信号[b(t)]和误差信号[e(t)]的对数幅值和相位。
频率特性测试仪测试数据经相关器件运算后在显示器中显示。
根据式(3—3)和式(3—4)分别计算出各个频率下的开环对数幅值和相位,在半对数坐标纸上作出实验曲线:开环对数幅频曲线和相频曲线。
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转角频确定频率特性(或传递函数)。
所确定的频率特性(或传递函数)的正确性可以由测量的相频曲线来检验,对最小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特性(或传递函数)所画出的理论相频曲线在一定程度上相符。
如果测量所得的相位在高频(相对于转角频率)时不等于-90°(q-p)[式中p和q分别表示传递函数分子和分母的阶次],那么,频率特性(或传递函数)必定是一个非最小相位系统的频率特性。
2.被测系统的模拟电路图被测系统的模拟电路图:见图3-2注意:所测点-c(t)、-e(t)由于反相器的作用,输出均为负值,若要测其正的输出点,可分别在-c(t)、-e(t)之后串接一组1/1的比例环节,比例环节的输出即为c(t)、e(t)的正输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于THKKL-4型控制理论·计算机控制技术实验箱自动控制原理实验指导书
浙江天煌科技实业有限公司编写
张立庞亚丽改编
吉林大学珠海学院电子信息系
2009-09-01
目录
实验一典型系统动态和稳态性能分析
实验二线性定常系统的瞬态响应和稳定性分析实验三控制系统的频率特性分析
实验四自动控制系统的校正
实验五时域分析法MATLAB仿真实验
实验六根轨迹分析法MATLAB仿真实验
实验七频率特性分析法MATLAB仿真实验
实验一 典型系统动态和稳态性能分析
一、实验目的
1.掌握控制系统中各典型环节的有源电路模拟设计、参数计算方法。
2.掌握通过测量典型环节的阶跃响应曲线来测试系统动态和稳态性能指标的技能。
3.深入了解和体验系统参数对系统性能的影响。
二、实验前准备
1. 基于集成运放的基本运算电路
基本运算电路主要指比例、加、减、乘、除、积分、微分、对数、指数等电路。
比例运算电路是其它基本运算电路的基础。
本实验主要用到比例、加、减、积分、微分等运算电路。
(1)比例运算电路
有反向输入、同相输入、差分输入三种基本形式。
图2.1是反向比例运算电路。
根据虚断原则,知: i i -+==0
因为i +=0,可知u +=0
根据虚短原则,有 u u +-==0
则有
f i o
f f R R u u u R R R R -=
+
=++1
110
因此, f o i R u u R =-
1
该电路的输出电压与输入电压幅值成正比,相位相差0
180,放大倍数f o
uf
i R u A u R ==-1。
当f R R =1时,此电路为单位增益倒相器,也称反相器。
图2.2是同相比例运算电路。
根据虚短和虚断原则,有如下关系: i u u +=
o f
R u u R R -=
+1
1
u u +-=
i
u o
u
R 图2.1 反相比例运算电路
i
u o
u f
图2.2 同相比例运算电路
f
f o i i R R R u u u R R ⎛⎫+=
=+ ⎪ ⎪⎝
⎭11
11
f f o
uf i R R R u A u R R ⎛⎫+=
==+ ⎪ ⎪⎝
⎭1111 当f R =0时,有o i u u =,此时称该电路为电压跟随器。
至于差分输入比例运算电路,本质上是一种减法电路,将在下面介绍。
(2)加法运算电路 根据虚短虚断原则,有
s s o f
u u u
R R R ++=12120 f f o s s R R u u u R R =-
-
121
2
如果f R R R ==12,则有=-+()o s s u u u 12,可见电路可以实现电压信号的求和运算。
当≠R R 12时,可以实现电压信号的加权求和。
显然,求和电路的输入电压个数不限于两路。
(3)减法运算电路 1)通过反相求和实现减法运算
电路由一个反相器和一个加法运算电路组成。
=-
-
=-
+
f f f f f o s o s s R R R R R u u u u u R R R R R 2222121215
3
5
3
1
通过选择合适的R 1、R 3、R 5、f R 1、f R 2,容易实现=-o s s u u u 12。
2)利用差动输入实现减法运算 f s s o f f
R R R u u u R R R R R R =++++23
121233
因此,有
s u 1
o
u
图2.3 加法运算电路
s u 2
s u
图2.4 反相求和式减法电路
u
R s u o
u 图2.5 差动式减法运算电路
s u R
f f o s s R R R R u u u R R R R +=
⋅-+32
121233
(4)积分运算电路
i
u o
u
图2.6 积分运算电路
o i
u i dt u dt C
R C
=-
=-
⎰⎰1111
式中,R C τ=1称为积分器的时间常数,它决定了积分速度。
(5)微分运算电路
o
u 图2.7 基本微分运算电路
c i o R du du
u R i R C R C dt dt
==-=-221
21 2.写出下表所示各典型环节的传递函数。