合成孔径与实孔径雷达谱域成像算法对比分析
机载聚束模式合成孔径雷达的成像算法

基于图像聚焦与运动补偿的改进算法
总结词
详细描述
该算法通过引入图像聚焦和运动补偿技术, 实现了对运动目标和复杂背景的高分辨率成 像。
基于图像聚焦与运动补偿的改进算法,通过 对运动目标和复杂背景进行聚焦和补偿处理 ,提高了成像的分辨率和对比度。该算法具 有较高的计算复杂度,但能够提供高质量的 SAR图像,适用于对运动目标和复杂背景的
实验结果展示与分析
结果展示
将机载聚束模式合成孔径雷达的原始回波数据转化为 地物图像,并进行对比分析。
结果分析
通过与实地采集的地物图像进行对比,验证了机载聚 束模式合成孔径雷达的成像效果。
成像算法性能评估与对比分析
性能评估:评估机载聚束模式合成孔径雷达的成像算法在分辨率、对比度、清晰度等方面的性能指 标。
机载聚束模式合成孔径雷达 的成像算法
2023-11-06
目 录
• 成像算法概述 • 聚束模式SAR基本成像算法 • 改进型聚束模式SAR成像算法 • 成像算法的优化与实现 • 成像算法验证与分析 • 结论与展望
01
成像算法概述
合成孔径雷达(SAR)基本原理
合成孔径雷达是一种雷达成像技术,通过在飞行器上安装雷达天线,利用目标的 反射信号,生成高分辨率的图像。
数据输出与显示
将成像结果和目标信息进行输出和 显示,为后续任务提供决策支持。
05
成像算法验证与分析
实验场景与数据采集
实验场景
机载聚束模式合成孔径雷达(CS-SAR)在城市、农田、 山丘等典型地物场景中进行实验。
数据采集
采集不同飞行高度、速度、姿态等条件下的雷达回波数 据,以及对应的地物图像数据。
除了军事应用外,该成像算法也可应用于民用航空领域,例如机场跑道检测、地形测绘、 气象观测等方面,具有广泛的应用前景。
弹载合成孔径雷达成像处理及定位误差分析
,£ ≈ ( )
( cs n C S CS s E 。 E i 0+ s O  ̄ O 0一 i ) n
当雷 达 波 束 所 照 射 区 域 的 同 一 距 离 环 带 上 出 现 不 同方 位 角 的 两 个 目标 B , C 时 ,两 目标 间存 在 多 普 勒 频 差 ,通 过 合 理 地 设 置 多 普 勒 滤 波 器 ,就 可 以 区 分 开 真 实 天 线 波 束 照 射 宽 度 内距 离 相 同 而方 位 不 同 的 回波 ,从 而 有 效 改 善方 位 分 辨 力 . 22雷 达 信 号 数 学 模 型 .
制 导 中 的应 用 实 验 .
2弹 载 S R原 理 A
21空 间几 何 关 系 .
假 定 载 体 与 波 束 照 射 区 域 的 几 何 关 系 L l J
如 图 1 示 .其 中 , 所
P 是 载 体 航 迹 , 7,
和 E分 别 为 视 角 、 平 方 位 角 和 俯 仰 角 , H , 水
设载体 在很 短时 间内作 匀速直线 飞行 ,整个雷达 波束所 照射区域 的回波信号 s£ 为 [ ( ) 。 】
s ) ,。 (丁) , ㈤ = I s R) c 一(一 ) [ 2 t
其中 ,R 0 =I( ,)epj ( ,) 为分辨单元的地面散射系数, 2 t C为反射回波时间 ( ,) ,R I { ̄R ) x R( / ) 延迟 , R . R . O为分 辨单元面 积, R 为斜 距。为讨论方便 ,令天 线方 向性 函数 A() 1. d d O=
函数 ( 回波信号 的多普 勒相位 历程) 为 ( , 记 £ ) 天线 瞄准 点的瞬时多普 勒频率记为 f t 。t ( ) 变
图 1 载体 与 目标间的几何关 系
雷达成像技术(保铮word版)第五章 合成孔径雷达成像算法
第五章 合成孔径雷达成像算法SAR 成像处理最初用光学处理,后来采用数字处理。
与光学处理相比,数字处理更精确、更灵活,在距离徙动校正、运动补偿、几何校正和坐标转换等方面有明显的优势。
SAR 成像处理主要有两个问题,一是距离徙动校正,二是运动补偿。
距离徙动可分解一次的线性分量和二次以上(包括二次)的弯曲分量,线性分量称为距离走动,弯曲分量称为距离弯曲。
这一章主要讨论针对不同距离徙动程度情况下,需要采用的不同成像算法,运动补偿将在下一章讨论。
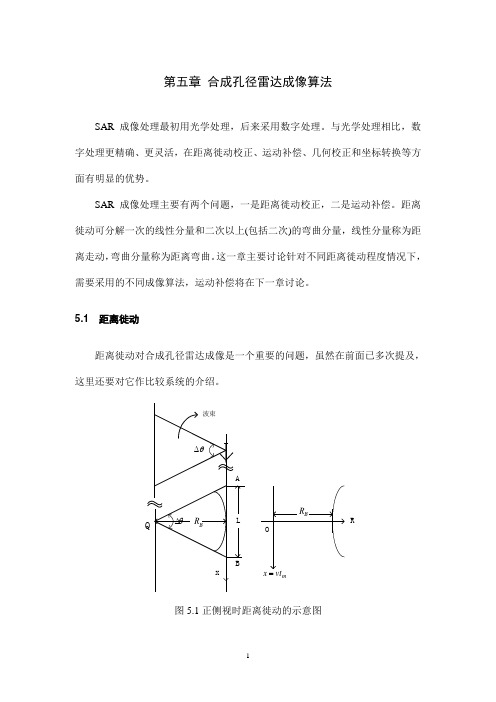
5.1 距离徙动距离徙动对合成孔径雷达成像是一个重要的问题,虽然在前面已多次提及,这里还要对它作比较系统的介绍。
θ∆波束Qθ∆BR B ALxBR ROmvt x图5.1正侧视时距离徙动的示意图距离徙动的情况对不同的波束指向会有所不同,首先讨论正侧视的情况,这时距离徙动可用图5.1来说明。
所谓距离徙动是雷达直线飞行对某一点目标(如图中的Q 点)观测时的距离变化。
如图5.1所示,天线的波束宽度为θ∆,当载机飞到A 点时波束前沿触及Q 点,而当载机飞到B 点时,波束后沿离开Q 点,A 到B 的长度即有效合成孔径L ,Q 点对A 、B 的转角即相干积累角,它等于波束宽度θ∆。
Q 点到航线的垂直距离为最近距离B R 。
这种情况下的距离徙动通常以合成孔径边缘的斜距R 与最近距离B R 之差表示,即BB B q R R R R R -∆=-=2secθ (5.1)在合成孔径雷达里,波束宽度θ∆一般较小,2)(2112secθθ∆+≈∆,而相干积累角θ∆与横向距离分辨率a ρ有以下关系:θλρ∆=2a 。
利用这些关系,(5.1)式可近似写成:22232)(81aBB q R R R ρλθ=∆≈(5.2)假设条带场景的幅宽为W ,即场景近、远边缘与航线的最近距离分别为2W R B -和2W R B +,得场景两端的距离徙动差为2232a q WR ρλ=∆ (5.3)距离徙动和距离徙动差的影响表现在它们与距离分辨率r ρ的相对值,如果它们比r ρ小得多,就无需作包络移动补偿。
3种主动合成孔径成像技术极限探测能力的分析与比较
2.1 傅立叶望远镜成像原理 傅立叶望远镜[69]采用 3束(或更多)经过移
频和准直的激光束同时照射目标。通过改变地面 发射基线位置以实现改变空间频率的目的。目标 反射光则包含了与发射基线空间频率相对应的目 标频谱信息。光学能量接收系统用于收集目标反 射光,经过时间解调和相位闭合处理后可以得到 与发射基线空间频率相对应的目标傅立叶分量。 在获得足够多目标傅立叶分量的基础上,通过逆 傅立叶变换即可重构目标图像。傅立叶望远镜系
ChineseAcademyofSciences,Changchun130033,China; 2.UniversityofChineseAcademyofSciences,Beijing100049,China)
Correspondingauthor,Email:nodepression@126.com
第 1期
董 磊,等:3种主动合成孔径成像技术极限探可获 得 目 标 振 幅 分 布 的 远 场 衍 射 波 面。 然 后将衍射场进行逆傅立叶变换获得目标振幅分 布,再经过取模和平方即得到目标光强分布。目 标的单帧恢复图像具有严重的散斑噪声,通过多 帧平均可降低散斑噪声的影响。剪切光束成像图 像恢复流程图如图 6所示。
成像相关术[1012]采用一束激光照射目标,在
图 3 成像相关术概念示意图 Fig.3 Conceptualschemeofimagingcorrelography
因激光照明会产生大量散斑,故实际操作中 利用多帧数据平均可有效降低散斑噪声的影响, 并提高傅立叶变换模值的估计精度。成像相关束 的图象恢复流程图如图 4所示。
Abstract:InordertodeeplystudythefeasibilityGEO imagingtechniques,thispaperdeeplyanalyzesand comparesthreetechniquesforactiveinterferometricsyntheticapertureimagingbymeansofsensitivity.These techniquesareFouriertelescopy,imagingcorrelographyandshearedbeam imaging.UsingaSNR(signalto noiseratio)modelforphotomultipliertubesandlaserrangeequations,thispapergivesadetailedanalysisof thelimitdetectioncapabilityofeachtechniquewhenSNRis5.Throughsimulation,itwasfoundthatthelow estsinglepulseenergiesforFouriertelescopy,imagingcorrelographyandshearedbeamimagingwere114J,
雷达成像中的合成孔径概念
t tc rect exp j 2 f 0 0 T a
t t
SAR信号模型
motion is the solution, but also the problem
0 t 2 s(t , ) rect exp j k t 0 T
孔径合成概念
L
实孔径
Nyquist sampling D
a R
L
实阵列
2L
合成孔径 a R
多普勒波束锐化
雷达静止
1 2 Y
fd
2v
cos
Y
雷达运动
3
1
2
3
X
X
v
fd1=0 fd2=0 fd3=0
fd1<0 fd2=0 fd3>0
多普勒波束锐化
Y
fd
距离多普勒域的距离徙动
R f t R0
2 R0
8v 2
ft2
正侧视条件下频谱—两维频谱
2R ft ft 2 f2 s( f t , f ) exp j exp j exp 2 f k c ka
0 t t t 2 s(t, ) rect c rect exp j k t exp j 2 f 0 0 t 0 Ta Tr
SAR信号模型
雷达静止不动
2 0 s(t , ) rect exp j k 0 T
SAR信号分析
合成孔径

发射信号的线性相位
1 t
与距离有关的常数相位
2
飞机运动产生的二次相位
4 R0
2
3
2 ( X 0 X p )
R0
如果令Xo=V*to,Xp=V*t,则有
3
2 V (t t0 )
2
2
R0
4 R0 2 V (t t0 )
2 2
将相位对时间求导数,再除以360度,即得回波 信号的瞬时频率:
从目标散射回来的回波脉冲数N与三个因素有关: • 天线的发射脉冲的周期Tr
• 雷达的运动速度Va
• 波束在目标P点处的直线长度Ls
Ls R
Ts N Ts Tr Ls Va Ls Va .Tr 1 Ls x 1
1
图 阵列天线的概念
如果从目标P散射回来的N个脉冲回波的相位关系与 实际小天线元所接收到的信号的相位关系完全一样,必 须注意它是往返的双程差,则合成天线的波束角应为:
合成孔径雷达原理
回波信号的特性
合成孔径的匹配滤波
合成孔径的相关处理
图 合成孔径雷达空间几何关系
飞机以Va的速度沿X方向作匀速直线飞行,飞行高度为 H,机载雷达天线以规定的高低角向航线正侧方向地面发射 无线电波。设其垂直波束,方位波束角,测绘带宽,最大 合成孔径长度(远距点),最小合成孔径长度(近距点)。
f Dc
2
( s sc )
fr
4
( s sc )
2
距离迁移是SAR处理中必然出现的现象,距离迁移为
R R( s) R0
虽然距离迁移是SAR处理中必然出现的现象,但它的 大小随系统参数不同而变化,并不总需要补偿。通常认 为,如果最大距离迁移值不大于四分之一个距离分辨单 元,则距离迁移不需要补偿,即:
合成孔径雷达BP与FBP时域成像算法比较
合成孔径雷达B P 与F B P 时域成像算法比较史㊀鉴,陈家瑞(中国船舶重工集团公司第七二三研究所,江苏扬州225101)摘要:通过算法原理和性能分析,比较了合成孔径雷达反向投影算法(B P )与快速反向投影算法(F B P )2种时域成像算法,对实测数据进行仿真处理,对比了2种算法的处理效果.关键词:合成孔径雷达成像;反向投影算法;快速反向投影算法中图分类号:T N 957 52㊀㊀㊀㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀㊀㊀㊀文章编号:C N 32G1413(2019)01G0058G04D O I :10.16426/j .c n k i .jc d z d k .2019.01.014C o m p a r i s o no fT i m eD o m a i n I m a g i n g A l go r i t h m s o f B Pa n dF B Pf o r S A RS H I J i a n ,C H E NJ i a Gr u i(T h e 723I n s t i t u t e o fC S I C ,Y a n gz h o u225101,C h i n a )A b s t r a c t :T h i s p a p e rc o m p a r e s t w ot i m ed o m a i nr a d a r i m a g i n g a l g o r i t h m s :b a c k p r o je c t i o n (B P )a n df a s t b a c k p r o j e c t i o n (F B P )t h r o ugh t h e a l g o ri t h m p r i n c i p l e a n d p e r f o r m a n c e a n a l y s i s ,a n d c o m Gp a r e s t h e p r o c e s s i n g e f f e c t i v e n e s s o f t w o a l g o r i t h m s t h r o u g hs i m u l a t i o nb y u s i n g me a s u r e dd a t a .K e y wo r d s :s y n t h e t i c a p e r t u r e r a d a r i m a g i n g ;b a c k p r o j e c t i o n a l g o r i t h m ;f a s t b a c k p r o j e c t i o n a l g o r i t h m 收稿日期:201703130㊀引㊀言合成孔径雷达(S A R )成像经过数十年的发展,主要形成了时域和频域两大类成像算法.主要的频域成像算法有距离多普勒(R D )算法[1]㊁ωGk 算法[2]㊁调频变标(C S )算法[3]㊁极坐标格式算法(P F A )[4]等.时域成像算法主要有反向投影(B P )算法[5],以及基于B P 算法的快速反向投影(F B P )算法等.B P 算法最初源于计算机层析成像技术,后经发展应用到医学C T 成像等领域,美国科学家M c C o r k l e 最早将该成像技术引用到合成孔径雷达成像中.该算法的基本思想是以像素为最基本单位,将成像区域划分成网格,计算出每一方位时刻S A R 平台的位置与每一个网格点(像素点)之间的距离,然后算出双程延时,再根据每个方位脉冲计算的双程延时进行反投影,得到每张层析图,最后再将所有的层析图进行相位补偿后相干叠加,得到最终的S A R 图像.雷达发射的电磁波照射到成像场景中,经反射得到目标雷达回波,回波信号经距离向脉压后,由于电磁波波前是弧形球面波,因此每一方位时刻距雷达平台的距离是变化的,该现象称为距离徙动,且距离徙动轨迹随目标散射点径向距离的不同而弯曲程度不同.B P 算法通过逐点反投影成像,消除了距离徙动对成像的影响.虽然B P 算法在数学原理推导过程中,没有经过近似处理,具有很好的精确性和稳定性;但是由于该算法对每一脉冲进行反投影,运算量大,消耗资源多,因此限制了其实际应用.F B P 算法先通过划分子孔径,在降低角域采样点数基础上对每个子孔径反投影成像得到角分辨率低的图像,然后再将子孔径低角分辨率图像逐级融合处理,得到高分辨率图像.F B P 算法可以很大幅度减少运算量,提高了运算实时性,为B PS A R 成像算法在实际工程中的运用提供了可行性.2019年2月舰船电子对抗F e b .2019第42卷第1期S H I P B O A R DE L E C T R O N I CC O U N T E R M E A S U R EV o l .42N o .11㊀B P成像算法1 1㊀聚束S A R成像模型聚束式S A R成像是一种常见的成像模式,该模式在成像时,可以根据需要,调整天线波束指向,实现对某一区域灵活的高分辨率成像.与其他S A R 成像模式相比,在相同合成孔径长度时,聚束模式下,场景中的目标成像合成孔径时间比条带模式下更长,从而拥有更大的方位扫描角度㊁更高的方位向分辨率,打破了条带S A R下方位向分辨率受限的情况,并且在成像区域的选择上更具有灵活性.如图1所示,假设雷达载机沿着X轴的方向上以速度v匀速直线飞行,高度为H,载机在Y轴上的坐标为y a.坐标原点O设在成像场景中心,R 为合成孔径到成像场景中心点O的垂直距离,雷达载机在飞行时,天线中心的瞬时坐标为(x a,y a, H),点P(x,y,z)为成像场景中任意一点的坐标, R a为点(x a,y a,H)到点P(x,y,z)的瞬时距离.图1㊀聚束S A R空间模型图1 2㊀B P算法原理分析B P成像算法首先计算当前方位时刻雷达天线相位中心到成像网格中的每个像素点的瞬时斜距,根据斜距计算出双程时延,然后根据延迟时间,从脉压后的脉冲数据中求出成像区域中每个像素点对应的回波值,通过差值处理,形成一张层析图,每个脉冲反投形成一张层析图,最后将所有层析图相干叠加得出最后的B P算法S A R图像.具体实现步骤如下:步骤1:将所有雷达回波脉冲脉压处理;步骤2:计算成像区域每一像素点与每一脉冲时刻雷达天线的斜距,并将对应时刻脉压后的脉冲数据进行插值反投影操作得到一张层析图;步骤3:参照成像区域中心点O,对每张层析图进行相位补偿;步骤4:重复步骤3和4,每一脉冲反投影的图像数据沿方位时刻相干叠加,直至所有脉冲处理完;步骤5:保存叠加数据,得到最终S A R图像.1 3㊀B P算法运算量分析B P算法处理步骤:首先脉冲压缩,然后反投影处理,最后以场景中心点为参考点进行相位补偿,其中运算量较大的为前2个过程.脉冲压缩主要包括复加㊁复乘以及复除;反投影过程主要包括复加和复乘.假设雷达回波数据量为RˑL(L㊁R分别为方位向和距离向数据量),成像区域像素点为MˑN,采用频域脉冲压缩处理.(1)距离向快速傅里叶变换(F F T):LˑR2l o g2R次复加,LˑR2l o g2R次复乘.(2)参考系数点乘运算:RˑL次复除,RˑL 次复乘.(3)距离向快速傅里叶逆变换(I F F T)运算:L ˑR2l o g2R次复加,LˑR2l o g2R次复乘.(4)反投影运算:LˑMˑN次复加,LˑMˑN次复乘运算.由以上分析可知,反投影中的插值运算次数就高达L MN次,如果有效地减少反投影操作的运算量,将大大提高B P算法的处理效率,F B P算法正是一种减少反投影操作运算量的快速B P成像算法.2㊀F B P成像算法2 1㊀F B P成像原理根据成像模型,每一由天线位置反投影的回波数据在同一径向距离每圆弧上是相同的.对于相邻天线位置的A㊁B两点,在角度很小的一个扇形区域内,可以近似认为具有相同的一组同心圆,即可以以该扇形波束中心距离作为该区域的反投影距离,通过这种近似,降低角域采样点数得到角分辨率低的图像,然后再通过逐级融合,得到高分辨率图像如图2所示.2 2㊀F B P算法流程F B P算法的处理过程可以看作新波束形成以95第1期史鉴等:合成孔径雷达B P与F B P时域成像算法比较图2㊀极坐标系下误差图及子孔径叠加的过程.假设合成孔径长度为L点(即方位向有L个脉冲),成像区域像素点为MˑN.将L点长度的合成孔径长度通过k级级联划分形式表示为:L=l1ˑl2ˑ ˑl k(1)式中:l i为第i级处理过程中子孔径叠加后其个数减少的倍数.为后续分析方便,假设L=M=N,l1=l2= =l k=n,则新一级子孔径长度为上一级的n倍,同时新一级子孔径数目减少了n倍,新一级子孔径对应的波束数为原来的1/n,波束数目较上一级增加了n倍.利用新波束的中心距离线来计算扇形波束的反投影数据.首先将该扇形区域中心距离线进行M 点离散采样处理,计算出区域其他点与新孔径位置之间的距离,根据这M个点数据计算出该扇形区域反投影的数据,进行反投影插值处理,得到一组反投影数据.新一级的一个新波束的反投影数据与上一级n个旧波束反投影数据有关.为保证得到直角坐标下S A R图像,还需对新波束中心距离线上M个后向投影数据进行α倍的插值.图3㊀第i级处理过程图3所示为第i级处理过程,此时n=2,子孔径波束数量增为原来的2倍,子孔径数目减少为原来的1/2.新波束的反投影数据是通过对前一级两相邻子孔径对应的反投影数据经一系列合成运算获得的.通过上述F B P算法处理流程,逐级处理,直至最后一级,最终得到像素点为MˑN的高分辨率S A R图像.2 3㊀F B P算法运算量分析F B P成像算法在第一级过程中,新一级的子孔径数变为L/n个,并且通过原来n个旧波束形成一个新波束,波束的采样率为M,通过插值处理,得到该级处理最终所需要的像素点,设插值因子为α,则其运算量为:(L/n)n nαM=nαN2(2)㊀㊀在第二级处理过程中,最初子孔径数量通过融合处理后减少为L/n2个,每个新的子孔径形成n2个新波束,波束采样率同样为M,同时每个新的波束通过上一级n个旧波束的数据形成,插值因子同样为α,则其运算量为:(L/n2)n2nαM=nαN2(3)㊀㊀每一级子孔径合成的运算量均为nαN2,通过级级融合,直到最后的高精度图像,其总的运算量为nαN2l o g n N.一般情况下,对于S A R成像处理,α=8的插值就能满足其精度要求,可以得到F B P算法和B P算法所用运算时间比为:t B Pt F B P=N8n l o g n N(4)㊀㊀对于定值N,当n=e(e为自然对数)时,运算时间比可得到最大值.但由于n必须为整数,因此上式最大值出现在n=3处.当L=M=N时,B P 成像算法耗时只与N有关,因此对于给定的N,当n=3时,F B P算法耗时最少㊁处理速度最快.通过分析,从上式还可知:当Nɤ128,n=2时,B P算法比F B P算法快;当Nɤ128,n=2时,F B P算法比B P算法快,且N越大,F B P算法相对于B P算法的速度就越快.3㊀仿真分析先采用点目标成像处理来验证B P和F B P成像算法,表1为点目标仿真模型参数.另外,F B P级数n=2,成像区域像素网格间隔为0 2mˑ0 2m, M=N=4096.06舰船电子对抗㊀㊀㊀第42卷㊀表1㊀聚束S A R 仿真参数参数名称数值载机速度154m /s 飞行高度5700m斜距10000m 调频斜率78 956MH z /μs 信号带宽1 16G H z 距离采样率1 5G H z脉冲重复频率P R F2200H z 波长0 03m ㊀㊀通过B P 算法和F B P 算法处理的点目标仿真结果(图4和图5)可以看出,点目标距离向和方位向都具有较好的成像效果,初步验证2种算法的可行性.图4㊀B P 算法仿真点图另外,分别采用B P 算法和F B P 算法对同一实测数据进行成像处理.成像大小为4096ˑ4096,由图6可以看出F B P 成像效果相比于B P 成像略差.该实验采用同一硬件处理平台,其中B P 耗时4831s ,F B P 算法耗时1095s ,F B P 比B P 算法处理速度约快5倍.F B P 算法虽然运算量减小,但是图5㊀F B P 算法仿真点图图6㊀B P 和F B P 实测数据成像实测S A R 图像清晰度相较于B P 算法略差,说明㊀㊀㊀(下转第66页)16第1期史鉴等:合成孔径雷达B P 与F B P 时域成像算法比较图7㊀帧数和P S L R㊁I S L R的关系图数更少,其匹配滤波函数旁瓣起伏更稳定,提高了相参积累的性能.由于本文用到对雷达回波进行通信信息解调处理,多普勒频移过大会造成子载波间干扰,影响解调性能;所以本文算法适用于一些目标径向速度较小的场合,比如车载雷达㊁船载雷达等.参考文献[1]㊀王万田,袁俊泉,王力宝,等.天空双基地预警雷达长时间相参积累算法研究[J].雷达科学与技术,2017,15(4):397402.[2]㊀谷文堃,王党卫,马晓岩,等.分布式O F D MGM I MO雷达非相参积累目标检测方法[J].系统工程与电子技术,2015,37(10):22662271.[3]㊀朱振军,林明,宋月丽.起伏目标下的非相参积累研究[J].计算机工程与应用,2014,50(2):208211.[4]㊀汪文英,杨帆,郑玄玄.一种强杂波背景下弱小目标长时间相参积累方法[J].现代雷达,2018,40(4):3133.[5]㊀L I U YJ,L I A O G H,X UJ W,e t a l.A d a p t i v eO F D Mi n t e g r a t e dr a d a r a n dc o mm u n i c a t i o n sw a v e f o r md e s i g nb a s e d o n i n f o r m a t i o n t h e o r y[J].I E E EC o mm u n i c a t i o n sL e t t e r s,2017,21(10):21742177.[6]㊀WA N GZL,G O N G G,F E N G R Q.A g e n e r a l i z e dc o nGs t r u c t i o no fO FD M MGQ AMs e q u e n c e sw i t h l o w p e a kGt oGa v e r a g e p o w e r r a t i o[J].A d v a n c e s i nM a t h e m a t i c s o fC o mm u n i c a t i o n s,2017,3(4):421428.[7]㊀Y A N GL,S I U Y M,S O O K K,e t a l.N e wc o n s t r u c t i o n s c h e m e t o r e d u c e t h eP A P Ro fMGQ AM O FD Ms i g n a l [J].W i r e l e s sP e r s o n a lC o mm u n i c a t i o n s,2015,80(3):12171230.[8]㊀杨宇飞.基于O F D M雷达通信一体化的接收算法设计[D].哈尔滨:哈尔滨工业大学,2017.[9]㊀杨小琪,姜卫东,霍凯.基于O F D M信号的无源雷达干扰抑制方法[J].雷达科学与技术,2016,14(4):364370.[10]罗丁利,向聪.一种基于K e y s t o n e变换的运动目标相参积累方法[J].现代雷达,2017,39(10):4954.[11]刘永军,廖桂生,杨志伟.O F D M雷达通信一体化波形相参积累研究[J].信号处理,2017,33(3):253259.[12]王彬.基于O F D M的通信与雷达共享信号设计[D].哈尔滨:哈尔滨工业大学,2017.[13]刘永军,廖桂生,杨志伟,许京伟.一种超分辨O F D M 雷达通信一体化设计方法[J].电子与信息学报,2016,38(2):425433.[14]R A O D T,K UMA R P R,R A J E S WA R IK R.R a n g e r e s o l u t i o n o f p u l s e c o m p r e s s i o n u s i n g g e n e t i ca l g o r i t h ma n d p a r t i c l e s w a r mo p t i m i z a t i o n[J].I n t e r n aGt i o n a l J o u r n a l o fA p p l i e dE n g i n e e r i n g R e s e a r c h,2015,10(16):3725537260.㊀㊀(上接第61页)F B P算法运算量的减小是基于降低S A R图像质量的.4㊀结束语本文通过仿真对比分析了2种算法的成像效率以及成像效果.B P算法能够实现高精度S A R成像,但是由于其计算量巨大,难以工程实时运用;而F B P算法,在保证时域算法精度基础上,通过减少计算量,为后续工程运用提供了理论基础.参考文献[1]㊀A U S H E MA N D A,K O Z MA A,WA L K E RJL,e t a l.D e v e l o p m e n t s i nr a d a r i m a g i n g[J].IE E E T r a n s a c t i o n so n A e r o s p a c ea n d E l e c t r o n i c sS y s t e m s,1984,20(4):363399.[2]㊀W I L E Y C A.S y n t h e t i c a p e r t u r e r a d a r s[J].I E E E T r a n s a c t i o n s o nA E S,1985,21(3):440443.[3]㊀MU N S O N DC,OᶄB R I E NJD,J E N K I N S W K.At oGm o g r a p h i c f o r m u l a t i o no f s p o t l i g h tGm o d e s y n t h e t i c a pGe r t u r er a d a r[J].P r o c e e d i n g s of T h eI E E E,1983,71(8):917925.[4]㊀聂鑫.S A R超高分辨率成像算法研究[D].南京:南京航空航天大学,2010.[5]㊀Y E G U L A L P A F.F a s tb a c k p r o j e c t i o na l g o r i t h m f o r s y n t h e t i c a p e r t u r e r a d a r[C]//P r o c e e d i n g s o f1999I E E ER a d a rC o n f e r e n c e,W a l t h a m,U S,1999:6065.66舰船电子对抗㊀㊀㊀第42卷㊀。
合成孔径雷达成像算法与实现
合成孔径雷达成像算法与实现
合成孔径雷达成像是利用多个雷达发射的信号,经过相位平移和叠加来组合成一幅完整的雷达图像。
合成孔径雷达成像算法具有多种类型。
根据处理思路可以将其分为两大类:基于传感器的算法和基于信号处理的算法。
基于传感器的算法主要利用发射或接收机的位置、射频移相和时间差。
接收机位置关系到雷达合成靶被检测的位置信息。
而射频移相和时间差,则关系到雷达图像后处理中雷达接收和成像之间的信号处理。
基于信号处理的算法,例如合成孔径雷达(SAR)算法,主要基于正交步进技术,用发射信号的时间域响应来表示目标的距离和相位信息。
此外,利用相空间和时间处理技术将发射信号的接收信号进行反演处理,以形成多维数组,最终得到一幅精准的雷达图像。
此外,合成孔径雷达成像还可以利用计算机图形处理技术对图像进行处理,细化图像,提高成像精度,从而使其成为一种有效的距离测量定位工具。
总之,合成孔径雷达成像算法为雷达成像研究提供了多种新的思路,并且在精度、操作效率、低功耗、扩展性等方面的性能都有明显的改善,在成像及目标检测等应用领域有着广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ab ta t sr c :Ra a ma ig ag rt mso o h s n h t p r u er d r( AR)a d ra p ru e d ri g n lo ih fb t y t ei a e t r a a S c n e la e t r
rd r( a a RAR) s a n n d la e s u id I s b s d o wo d me so a v q a i n a d c n i g mo e r t d e . t i a e n t — i n i n lwa e e u t n o b s c f e u n y wa e u b r mi r to ma i g a g rt m. Th s p p r a ay e h o t a t a i r q e c — v n m e g a i n i g n l o ih i a e n l z st e c n r ss b t e AR n e we n S a d RAR mo es o h s e t f p ta p c r m i i g f r a d i g n e u t d l n t ea p c a i l e t u f l o m n ma i g r s l o s s ln rslt n e o u i .Two smu a i n r e f r d t a i a e t e e f c i e e s a d t e c r e t e s o o i l t s a e p r o me o v l t h fe tv n s n h o r c n s f o d r d r i g n l o ih n h b v h o e ia n l ss r s l . a a ma i g a g rt ms a d t e a o e t e r tc la a y i e u t
合 成 孔 径 与 实孔径 雷达 谱 域 成 像 算 法对 比分 析
雷文 太 。 黄春 琳。 王 怀 军。 粟 毅。 柳建 新
( . 南 大 学 信 息 科 学 与 工 程 学 院 , 沙 ,10 3 2 中 南 大 学 信 息 物 理 工 程学 院 , 沙 ,1 03 1中 长 4 0 8 ;. 长 408 ; 3 国防 科 技 大学 电 子科 学 与 工 程 学 院 , 沙 , 10 3 . 长 407)
第2卷第1 5 期 21 年 1 00 月
数
据
采
.1 . 5N
J u n l fDa a Ac u s in& P o e s g o r a o t q i t io rcsi n
J n 2 1 a. 00
文 章 编 号 : 0 4 9 3 ( 0 0 0 — 0 1 0 10 —0 7 2 1) 10 0—7
摘 要 : 论 了合 成 孔 径 雷达 ( y t ei a et r a a , AR) 实孔 径 雷达 ( e l p r r a a , R) 维 扫 描 讨 S n h t p ru erd r S c 和 R a a et erd r RA 一 u
方 式 下 的谱 域 成 像 实现 问题 。 中从 S 文 AR 和R AR 扫描 下 的 波 数 域 波 散 关 系入 手 , 分析 了这 两种 扫 描 方 式 下的 谱 域 填 充 区域 和 成 像 分辨 率 , 出 了二 者 的异 同 , 出 了相 应 的 成像 算 法 。 目标 和 组 合 目标 的 雷达 成 像 仿 真 实验 指 导 单
验 证 了 两种 扫 描 方 式 下成 像 算 法 的有 效性 和理 论 分析 结 果 。
关键词 : 成孔径; 合 实孔 径 ; 达 成像 ; 雷 成像 分辨 率
中 图分 类 号 : TN9 5
文 献 标识 码 : A
Co r s n l s s o AR nd RAR p ta pe t u m a i g r t m s nt a tA a y e f S a S a i lS c r m I g ng Al o ih
Le e t i ,H u n h n i 。 W a g I u i n ,SuYi ,L uJ a x n iW na a gC u l , n n t aj 。 u 。 i i n i 。
( . c o l fI f r to ce c n g n e i g,Ce ta o t i e st Ch n s a 1 S h o n o ma in S in e a d En i e rn o n r l u h Un v r iy, a g h ,4 0 8 S 1 0 3,Ch n i a; 2 S h o fI f — h sc n o t s E g n e i g,Ce t a o t ie st . c o l n o p y is a d Ge ma i n i e rn o c n r lS u h Un v r i y,Ch n s a 1 0 3 a g h ,4 0 8 ,Ch n ; i a 3 S h o fEl c r n cS in e a d En i e rn . c o lo e to i ce c n gn e i g,Na i n l t a i e st f f n e Te h oo y o Un v r iy o e s c n l g , De Ch n s a 1 0 3 a g h ,4 0 7 ,Ch n ) ia