差动轮系演示课件
合集下载
机械设计 轮系PPT课件

K
AH KH
从 从A A到 到K K所 所有 有主 从动 动轮 轮齿 齿积 积 数 数
周转轮系的传动比计算
三、使用转化轮系传动比公式时的注意事项
1、 i1Hk 是转化机构中1为主动轮、k为从动轮时的传动比,
其大小和正、负完全按照根据定轴轮系来处理。
2、齿数比前的“”、“”号不仅表明在转化机构中齿轮 1和齿轮n的转向关系,而且将直接影响到原来机构传动比 的大小和正负号。
i12
1 2
z2 z1
i34 4 3zz3 4
i2'3
2 3
z3 z2'
i45 5 4z z5 4
i15 15 (1)3
z2z3z5
z1z2'z3'
z2 z3 z5 zຫໍສະໝຸດ z2' z3'惰轮
i1k
1 k
(1)m
从动轮齿数连乘积 主动轮齿数连乘积
m :外啮合的次数
二、定轴轮系中各轮几何轴线不都平行, 但是输入、输出轮的轴线相互平行的情况
ωH1=ω1-ωH ωH2=ω2-ωH ωH3=ω3-ωH
ωHH=ωH-ωH=0
反转原理:给周转轮系中的每一个构件都加上 一个附加的公共转动(转动的角速度为-ωH) 后,不会改变轮系中各构件之间的相对运动,
但原周转轮系将转化成为一个假想的定轴轮系, 称为周转轮系的转化机构。
二、周转轮系传动比的计算方法
解
i1H31HH
z2z3 z1z2
i1H
1(
z2z3 z1z2
)
代入各轮齿数
2
2
3
H 1
i1H11100 19 01091 019090 9109100000 iH1 10000
机械设计基础 轮系PPT课件

.
7.用于运动的合成与分解
对于差动轮系(自由度为2)来说,它的三个基本构件(中心 轮、行星轮和行星架)都是运动的,必须给定其中任意两个基 本构件的运动,第三个构件才有确定的运动。这就是说,第三 个构件的运动是另两个构件运动的合成。
船用航向指示器
.
汽车后桥差速器
.
差速装置
差速装置
5 H
2
13
4 汽车后桥差速器的轮系可根据 转弯半径大小自动分解,nH使 . n1 、n3符合转弯的要求
机构运 动简图
蜗轮回转方向
表示蜗杆、蜗 轮回转方向
蜗杆旋向影响蜗轮的回转方向
.
如何判断蜗杆、蜗轮的转向?
蜗杆的转向
右旋蜗杆 左旋蜗杆
左 以左手握住蜗杆,四指 手 指向蜗杆的转向,则拇
右 以右手握住蜗杆,四指 手 指向蜗杆的转向,则拇
规 指的指向为啮合点处蜗 规 指的指向为啮合点处蜗
则 轮的线速度方向。
.
4.实现变速传动
.
5.实现转向传动
只改变输出轴转向、不改变传动比大小的齿
轮称为惰轮。
在主动轴转向不变的条件下,利用惰轮可以改变输出轴的转 向。如车床上走刀丝杠的三星轮换向机构。
.
6.实现大功率传动
为了减小传动机构的尺寸和重量, 在大功率传动中,广泛采用行星轮 系。由于行星轮系减速器的输入轴 和输出轴在同一轴线上,行星轮在 其周围均匀对称布置,尺寸十分紧 凑,很适合于飞行器。
.
第一节 轮系的分类和应用
一 轮系及其分类 1.根据齿轮的轴线是否互相平行分类
平面轮系
空间轮系
.
2.根据轮系运转时齿轮的轴线位置相对于机架 是否固定分类
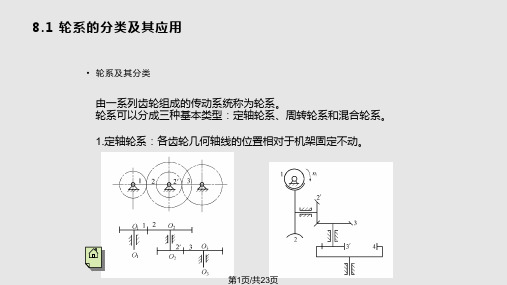
(一) 定轴轮系 定义—— 运转过程中各齿轮的几何轴线位置相对于机架
7.用于运动的合成与分解
对于差动轮系(自由度为2)来说,它的三个基本构件(中心 轮、行星轮和行星架)都是运动的,必须给定其中任意两个基 本构件的运动,第三个构件才有确定的运动。这就是说,第三 个构件的运动是另两个构件运动的合成。
船用航向指示器
.
汽车后桥差速器
.
差速装置
差速装置
5 H
2
13
4 汽车后桥差速器的轮系可根据 转弯半径大小自动分解,nH使 . n1 、n3符合转弯的要求
机构运 动简图
蜗轮回转方向
表示蜗杆、蜗 轮回转方向
蜗杆旋向影响蜗轮的回转方向
.
如何判断蜗杆、蜗轮的转向?
蜗杆的转向
右旋蜗杆 左旋蜗杆
左 以左手握住蜗杆,四指 手 指向蜗杆的转向,则拇
右 以右手握住蜗杆,四指 手 指向蜗杆的转向,则拇
规 指的指向为啮合点处蜗 规 指的指向为啮合点处蜗
则 轮的线速度方向。
.
4.实现变速传动
.
5.实现转向传动
只改变输出轴转向、不改变传动比大小的齿
轮称为惰轮。
在主动轴转向不变的条件下,利用惰轮可以改变输出轴的转 向。如车床上走刀丝杠的三星轮换向机构。
.
6.实现大功率传动
为了减小传动机构的尺寸和重量, 在大功率传动中,广泛采用行星轮 系。由于行星轮系减速器的输入轴 和输出轴在同一轴线上,行星轮在 其周围均匀对称布置,尺寸十分紧 凑,很适合于飞行器。
.
第一节 轮系的分类和应用
一 轮系及其分类 1.根据齿轮的轴线是否互相平行分类
平面轮系
空间轮系
.
2.根据轮系运转时齿轮的轴线位置相对于机架 是否固定分类
(一) 定轴轮系 定义—— 运转过程中各齿轮的几何轴线位置相对于机架
第八章-轮系PPT课件
定不动,于是,该周转轮系转化为定轴轮系。称该定轴轮系为原周 转轮系的“转化轮系”
第11页/共23页
转化轮系中齿 轮1的转速
转化轮系中齿 轮3的转速
转化轮系中齿轮1、3 的转向关系
转化轮系中齿轮 1、3的传动比
i1H3
n1H n3H
n1 nH n3 nH
(1)1 z2z3 z1z2
z3 z1
周转轮系又分为差动轮系和行星轮系两种。自由度F=2的周转轮系称为 差动轮系。自由度F=1的周转轮系称为行星轮系。
第2页/共23页
3.混合轮系:一个轮系中既有定轴轮系部分,又有周转轮系部分,或者 由几部分周转轮系组成。
第3页/共23页
• 轮系的应用
1.实现较远距离传动 2.实现分路传动
第4页/共23页
例 图中所示为电动卷扬机的传动装置,已知各轮齿数,求i15。
解:齿轮1、2-2’、3和H组成单一周转轮系
i1H3
n1 nH n3 nH
z3z2 z2 z1
齿轮5、4和3’组成定轴轮系比
i35
n3 n5
z5 z3
故:
i15
n1 n5
(1
z3 z2 z2 z1
z5z3z2 ) z3 z2 z1
3.实现变速与换向 4.获得大的传动比
第5页/共23页
5.实现合成或分解运动
第6页/共23页
8.2 定轴轮系的传动比
轮系的传动比通常是指轮系运动时其输入轴与输出轴的转速(或角速度) 之比。包括传动比数值的大小和输入轴与输出轴两者的转向关系。
输入轴 输出轴
i12
n1 n2
1 2
z2 z1
从动轮齿数 主动轮齿数
nH n2
z2 z1 z2
第11页/共23页
转化轮系中齿 轮1的转速
转化轮系中齿 轮3的转速
转化轮系中齿轮1、3 的转向关系
转化轮系中齿轮 1、3的传动比
i1H3
n1H n3H
n1 nH n3 nH
(1)1 z2z3 z1z2
z3 z1
周转轮系又分为差动轮系和行星轮系两种。自由度F=2的周转轮系称为 差动轮系。自由度F=1的周转轮系称为行星轮系。
第2页/共23页
3.混合轮系:一个轮系中既有定轴轮系部分,又有周转轮系部分,或者 由几部分周转轮系组成。
第3页/共23页
• 轮系的应用
1.实现较远距离传动 2.实现分路传动
第4页/共23页
例 图中所示为电动卷扬机的传动装置,已知各轮齿数,求i15。
解:齿轮1、2-2’、3和H组成单一周转轮系
i1H3
n1 nH n3 nH
z3z2 z2 z1
齿轮5、4和3’组成定轴轮系比
i35
n3 n5
z5 z3
故:
i15
n1 n5
(1
z3 z2 z2 z1
z5z3z2 ) z3 z2 z1
3.实现变速与换向 4.获得大的传动比
第5页/共23页
5.实现合成或分解运动
第6页/共23页
8.2 定轴轮系的传动比
轮系的传动比通常是指轮系运动时其输入轴与输出轴的转速(或角速度) 之比。包括传动比数值的大小和输入轴与输出轴两者的转向关系。
输入轴 输出轴
i12
n1 n2
1 2
z2 z1
从动轮齿数 主动轮齿数
nH n2
z2 z1 z2
清华大学机械原理——轮系PPT课件

(2) 运动分解
nH
1 2
(n3
n5 )
n3 r L n5 r L
n3
r
r
L
nH
n5
r
r
L
nH
第46页/共75页
6. 实现执行机构的复杂运动
行星轮既有自转又有公转—复杂运动
例:行星搅拌机构
第47页/共75页
用于食品加工的行星搅拌机构
第48页/共75页
5.5 轮系的设计
定轴轮系的设计 基本内容 ➢选择轮系的类型 ➢确定轮系中各轮的齿数 ➢选择轮系的布置方案
缺点:中间轴较长,变 形使齿宽上的载荷分布 不均匀。
周转轮系的设计 基本内容 ➢周转轮系类型的选择 ➢确定轮系中各轮的齿数 ➢*周转轮系的均衡装置
第55页/共75页
1.周转轮系类型的选择
考虑因素:
➢传动比范围; ➢效率高低; ➢结构复杂程度; ➢外廓尺寸等。
第56页/共75页
➢当轮系主要用于传递运动时
双排2K-H 单排2K-H
假想一个中心
z1
x
z2 z2'
2) 同心条件
z2
i1H
(x 1) x 1
z1
3) 装配条件
k z1 i1H (Q Rx)
(Q, R均为正整数)
第68页/共75页
➢ 双排2K-H行星轮系(标准齿轮传动,各轮模数相等)
4) 邻接条件
(z1
z2
)
sin
180 k
z2
+2 ha*
假定z2 z2'
若 x z2 1 z2'
第34页/共75页
2. 实现减速、增速或变速运动
例1:汽车手动变速器(130)
11-第11章-轮系PPT课件
即:imH 1 imHn
4. 主从关系视传递路线不同而不同。
绝对传动比
公转
5. 平面轮系中行星轮的运动: 自转
H
H m
绝对转速 m
例二 轮系中, z1=z2=20, z3=60
2
1)轮3固定。求i1H 。
轮1逆转1圈,轮3顺转1圈
H
2)n1=1, n3=-1, 求nH 及i1H 的值。
1
3)n1=-1, n3=1, 求nH 及i1H 的值。 轮1、轮3各逆转1圈
解: 1)划分轮系 ✓齿轮1-2组成定轴轮系部分; ✓齿轮2-3-4-H组成周转轮系部分。
2)计算各轮系传动比
➢定轴轮系部分
i1 2
n1 n2
z2 z1
40 20
2
n 1 2 n 2 (1)
➢周转轮系部分
i
H 24
n2 nH n4 nH
z4 z2
z1=20
H z4=80
z3=30
z2=40 z2=20
定轴轮系 周转轮系
i2H4
n2 nH n4 nH
z4 z2
由 n4 0 , n2 n2 , z2 2 0 , z4 8 0
n2 nH nH
4
z1=20 z3=30
H z4=80
z2=40 z2=20
n 2 = 5 n H (2)
3)将(1)、(2)联立求解
n 1 = - 2 n 2 (1)
其它构件:行星轮。其运动有自转和绕中心轮的公转,类似行星运动,故得名。
由于轮2既有自转又有公转,故不
ω 能直接求传动比 3
2
-ωH
2 ω2
H
3
H
ωH
机械设计基础课件-轮系

由式(5-2)
可导出其传
动比
iH 1 nH n1 z1 z 2 z1
上式表明,如果齿数差z2-z1很小,则可获得较大的单级传动 比。当z2-z1 =1时,称为一齿差行星传动,此时iH1 =-z1 ,式 中“-”号表示行星轮1与行星架H转向相反。
四、合成运动和分解运动
合成运动是将两个输入运动合成为一个输出运动;分解运动 是把一个输入运动按可变的比例分解成两个输出运动。合成 运动和分解运动都可用差动轮系实现。 如图所示的轮系,若z1=z3,z2 = z2’ ,则
一组行星轮、行星架、中心轮构成一 个基本周转轮系。区分出各个周转轮 系以后,剩下的就是定轴轮系。
例 如右图所示轮系中,设已知各轮 齿数,n1 =300r/min。试求行星架H 的转速nH的大小和转向。 解 该轮系是由齿轮1、2所组成的定 轴轮系和由齿轮2′、3、4与行星架H 所组成的周转轮系构成的一个复合轮 系。 定轴轮系部分有
解 在此轮系中,由于齿轮 3和机架固定在一起,即n3
=0。由式(5-2)有
H 13
i
n1H n
H 3
n1 n H n3 n H
n1 n H 0 nH
z 2 z3 z1 z 2'
得 所以
i1H
n1 nH
1
z 2 z3 z1 z 2'
1
101 99 100 100
系,如图所示。
定轴轮系
在运转过程中,若其中至少有一个齿轮的几何轴线位置相对于机 架不固定,而是绕着其他齿轮的固定几何轴线回转的轮系称为周 转轮系,如下图所示。 自由度F=2的周转轮系称为差动轮系(图a);自由度F=1的周转轮 系称为行星轮系(图d)。
第10章轮系共31页
例题
1.轮系中各轮几何轴线均互相平行
规定: 外啮合:二轮转向相反,用负号“-”表示; 内啮合:二轮转向相同,用正号“+”表示。
i1k k 1
1m z2zk z1zk1
式中,m表示外啮合次数。
若计算结果为“+”,表明首、末两轮的转向相同; 反之,则转向相反。
2.轮系中所有各齿轮的几何轴线不都平行,但 首、末两轮的轴线互相平行
n H n 3 ii1 H 1 H 3 31 n 1 1 .1 7 .7 n 5 3 5 1 n 11 .72 n .7 5 3n 5 1
由于n1,n3转向相反,若令n1为正,n3以负值代入,有:
n H1 .7 5 2 1 .70 5 2 05 2 0 .2 7r7 /min
计算结果为“+”,说明nH与n1转向相同。
转化轮系中的传动比为
i1Hk1kH H
1 k
H H
从动轮齿数连乘 主动轮齿数连乘
在各轮齿数已知的情况下,只要给定ω1、ωk、ωH中任意两项, 即可求得第三项,从而可求出原周转轮系中任意两构件之间的传动比。
利用公式计算时应注意:
利用公式计算时应注意:
(1)公式只适用于齿轮1、齿轮k和系杆H三构件的轴线 平行或重合的情况,齿数比前的“+”、“”号由转化轮系 按定轴轮系方法确定。
i 当首轮用“1”,末轮用“k”表示时,
其传动比 1 k 的大小计算公式为
i1 k
1 k
n1 nk
传动比计算包含两项内容 ① 确定传动比的大小数值 ② 确定首、末两轮的转向关系
一、传动比大小的计算 二、首、末轮转向关系的确定
一、传动比大小的计算
已知:各轮齿数,且齿轮1为主动轮(首轮),
1.轮系中各轮几何轴线均互相平行
规定: 外啮合:二轮转向相反,用负号“-”表示; 内啮合:二轮转向相同,用正号“+”表示。
i1k k 1
1m z2zk z1zk1
式中,m表示外啮合次数。
若计算结果为“+”,表明首、末两轮的转向相同; 反之,则转向相反。
2.轮系中所有各齿轮的几何轴线不都平行,但 首、末两轮的轴线互相平行
n H n 3 ii1 H 1 H 3 31 n 1 1 .1 7 .7 n 5 3 5 1 n 11 .72 n .7 5 3n 5 1
由于n1,n3转向相反,若令n1为正,n3以负值代入,有:
n H1 .7 5 2 1 .70 5 2 05 2 0 .2 7r7 /min
计算结果为“+”,说明nH与n1转向相同。
转化轮系中的传动比为
i1Hk1kH H
1 k
H H
从动轮齿数连乘 主动轮齿数连乘
在各轮齿数已知的情况下,只要给定ω1、ωk、ωH中任意两项, 即可求得第三项,从而可求出原周转轮系中任意两构件之间的传动比。
利用公式计算时应注意:
利用公式计算时应注意:
(1)公式只适用于齿轮1、齿轮k和系杆H三构件的轴线 平行或重合的情况,齿数比前的“+”、“”号由转化轮系 按定轴轮系方法确定。
i 当首轮用“1”,末轮用“k”表示时,
其传动比 1 k 的大小计算公式为
i1 k
1 k
n1 nk
传动比计算包含两项内容 ① 确定传动比的大小数值 ② 确定首、末两轮的转向关系
一、传动比大小的计算 二、首、末轮转向关系的确定
一、传动比大小的计算
已知:各轮齿数,且齿轮1为主动轮(首轮),
机械原理轮系ppt课件
基本构件都是围绕着 同一固定轴线回转的
6
轮系的类型
根据轮系所具有的自由度不同,周转轮系 又可分为:差动轮系和行星轮系
计算图a)所示轮系自由度:
F 3 4 2 4 2 2
差动轮系:F=2
计算图b)所示机构自由度, 图中齿轮3固定
F 3 3 2 3 2 1
行星轮系:F=1
第九章
轮系
一对齿轮传动的传 动比是5—7
轮系:由一系列互相啮合的齿轮组成的传动机构,用
于原动机和执行机构之间的运动和动力传递。
1
第九章
•轮系的类型
轮系
•定轴轮系的传动比计算
•周转轮系的传动比计算 •复合轮系的传动比计算
•轮系的功用
•其他行星传动简介
2
§9.1 轮系的类型
根据轮系在运转时各齿轮的几何轴线在空间的相对位
惰轮:不改变传动比的大小,但改变轮系的转向
15
定轴轮系的传动比计算
2、定轴轮系中各轮几何轴线不都平行,但是 输入、输出轮的轴线相互平行的情况
传动比方向判断
画箭头 在传动比的前面加正、负号
16
传动比方向表示
定轴轮系的传动比计算
3、输入、输出轮的轴线不平行的情况 齿轮1的轴为输入轴, 蜗轮5的轴为输出轴,输 出轴与输入轴的转向关系
1 i15 ? 5
4 z5 i45 5 z4
1 1 2 3 4 i15 i15i12 i23 i34 i45 5 2 3 4 5
z2 z3 z4 z5 所有从动轮齿数的乘积 z1 z2 z3 z4 所有主动轮齿数的乘积
14
定轴轮系的传动比计算
二、传动比转向的确定
轮系ppt课件
.
一、任意从动齿轮的转速计算
i1k
n1 nk
zz12zz34zz56 zzkk1
(不考虑齿轮旋转方向)
nk
n1 i1k
n1zz12zz34zz56 zzk k1
.
【例4】已知:z1=26,z2=51,z3 =42, z4=29,z5 =49, z6=36,z7=56,z8=43,z9=30,z10=90, 轴Ⅰ的转速nI = 200 r/min。试求当轴Ⅲ上的三联齿轮分别与轴Ⅱ上的三个 齿轮啮合时,轴Ⅳ的三种转速。
.
【例2】如图所示轮系,已知各程
.
【 例 3】 已 知 z1=24 , z2=28 , z3=20 , z4=60 , z5=20 , z6=20,z7=28,齿轮1为主动件。分析该轮系的传动路线并 求传动比i17;若齿轮1转向已知,试判定齿轮7的转向。
.
行星轮系
中心轮——位于中 心位置且绕轴线回转的 内齿轮或外齿轮。
行星轮——同时与中 心轮和齿圈啮合,既作自 转又作公转的齿轮。
行星架——支承行星 轮的构件。
差动轮系
.
3.混合轮系
在轮系中,既有定轴轮系又有周转轮系。
.
二、轮系的应用特点
1.可获得很大的传动比 2.可作较远距离的传动 3.可以方便地实现变速和变向要求 4.可以实现运动的合成与分解
滑移齿轮变速机构
.
利用中间齿轮变向机构
.
4.可以实现运动的合成与分解
采用行星轮系,可以将两个独立的运动合成为一个 运动,或将一个运动分解为两个独立的运动。
.
§6-2 定轴轮系传动比计算
一、定轴轮系中各轮转向的判断 二、传动比 三、惰轮的应用
.
一、定轴轮系中各轮转向的判断
一、任意从动齿轮的转速计算
i1k
n1 nk
zz12zz34zz56 zzkk1
(不考虑齿轮旋转方向)
nk
n1 i1k
n1zz12zz34zz56 zzk k1
.
【例4】已知:z1=26,z2=51,z3 =42, z4=29,z5 =49, z6=36,z7=56,z8=43,z9=30,z10=90, 轴Ⅰ的转速nI = 200 r/min。试求当轴Ⅲ上的三联齿轮分别与轴Ⅱ上的三个 齿轮啮合时,轴Ⅳ的三种转速。
.
【例2】如图所示轮系,已知各程
.
【 例 3】 已 知 z1=24 , z2=28 , z3=20 , z4=60 , z5=20 , z6=20,z7=28,齿轮1为主动件。分析该轮系的传动路线并 求传动比i17;若齿轮1转向已知,试判定齿轮7的转向。
.
行星轮系
中心轮——位于中 心位置且绕轴线回转的 内齿轮或外齿轮。
行星轮——同时与中 心轮和齿圈啮合,既作自 转又作公转的齿轮。
行星架——支承行星 轮的构件。
差动轮系
.
3.混合轮系
在轮系中,既有定轴轮系又有周转轮系。
.
二、轮系的应用特点
1.可获得很大的传动比 2.可作较远距离的传动 3.可以方便地实现变速和变向要求 4.可以实现运动的合成与分解
滑移齿轮变速机构
.
利用中间齿轮变向机构
.
4.可以实现运动的合成与分解
采用行星轮系,可以将两个独立的运动合成为一个 运动,或将一个运动分解为两个独立的运动。
.
§6-2 定轴轮系传动比计算
一、定轴轮系中各轮转向的判断 二、传动比 三、惰轮的应用
.
一、定轴轮系中各轮转向的判断