下肢外骨骼机构的研究与仿真讲解
一种多自由度可调节下肢康复外骨骼的设计与仿真

一种多自由度可调节下肢康复外骨骼的设计与仿真
魏笑;毕文龙;李亚男;许倍豪;赵彦峻
【期刊名称】《机械传动》
【年(卷),期】2024(48)1
【摘要】针对下肢受损、脑卒中等患者的康复训练,设计了一款多自由度可调节下肢康复外骨骼,利用丝杆机构代替传统腿部结构,并在腰部设有转动模块,能更好地实现人机协同。
采用拉格朗日方法建立下肢外骨骼动力学模型,并计算了理论转矩;构建了下肢康复外骨骼模型,利用Ansys和Adams软件分别进行了有限元仿真和外骨骼运动学/动力学仿真。
结果验证了结构设计的合理性,为后续下肢外骨骼制造与电动机选型提供了依据。
【总页数】6页(P61-66)
【作者】魏笑;毕文龙;李亚男;许倍豪;赵彦峻
【作者单位】山东理工大学机械工程学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.一种下肢外骨骼康复机器人优化的结构设计与控制仿真分析
2.一种新型7自由度上肢康复外骨骼机器人的结构设计和运动学仿真
3.三自由度上肢康复外骨骼结构设计与仿真
4.一种10自由度外骨骼康复机器人结构设计与运动学分析
5.七自由度上肢外骨骼康复机器人设计与仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
一种新型助力携行下肢外骨骼设计及仿真

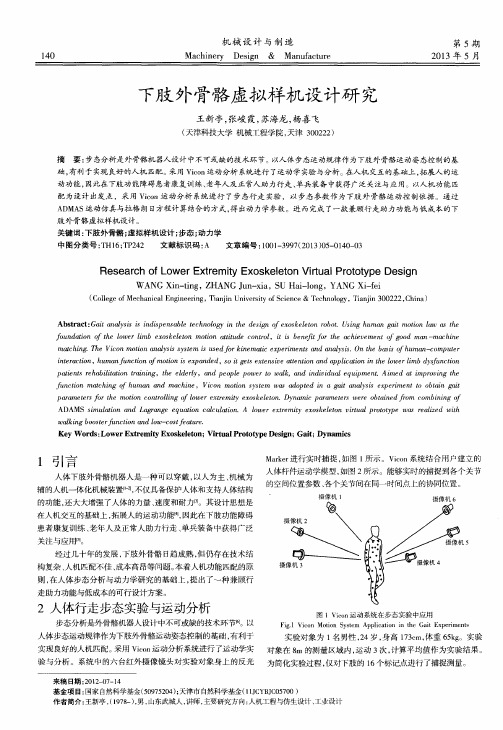
2018年8月第46卷第15期机床与液压MACHINETOOL&HYDRAULICSAug 2018Vol 46No 15DOI:10.3969/j issn 1001-3881 2018 15 003收稿日期:2017-03-23基金项目:国家自然科学基金青年基金资助项目(51505263);山东省科技发展计划资助项目(2014GGX103007);山东省高等学校科技计划项目(J15LB08)作者简介:吴俊杰(1992 ),男,硕士研究生,研究方向为外骨骼机器人建模㊁仿真与优化㊂E-mail:961451673@qq com㊂通信作者:赵彦峻,E-mail:zyj6270110@163 com㊂一种新型助力携行下肢外骨骼设计及仿真吴俊杰1,赵彦峻1,张忠东1,乔学昱1,张健2(1.山东理工大学机械工程学院,山东淄博255049;2.苏州纽威阀门股份有限公司,江苏苏州215000)摘要:设计了一种非拟人型下肢外骨骼,主要是由座椅㊁髋关节㊁大腿部结构㊁膝关节㊁小腿部结构㊁踝关节和鞋子依次串联而成,采用电机驱动㊂对下肢外骨骼进行了自由度分配与结构分析,根据坐标变换,运用D⁃H法建立下肢外骨骼的运动学模型㊂建立了下肢外骨骼虚拟样机模型,利用多体动力学仿真软件ADAMS进行运动学仿真㊂仿真结果验证了理论模型的合理性,为后期进一步研究外骨骼提供了依据㊂关键词:下肢外骨骼;运动学分析;D⁃H法;仿真中图分类号:TP242㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2018)15-012-4DesignandSimulationofaNewTypeofPowerAssistedPortableExoskeletonforLowerLimbsWUJunjie1,ZHAOYanjun1,ZHANGZhongdong1,QIAOXueyu1,ZHANGJian2(1.SchoolofMechanicalEngineering,ShandongUniversityofTechnology,ZiboShandong255049,China;2.NewayValve(Suzhou)Co.,Ltd.,SuzhouJiangsu215000,China)Abstract:Anon⁃anthropomorphicexoskeletonrobotdesignedismainlysuccessivelywiredinseriesbyaseat,ahipjoint,athigh,akneejoint,aleg,anankleandashoe,whichisdrivenbyanelectricmotor.Thestructureofthelowerlimbexoskeletonwasanalyzedanditsdegreesoffreedomweredistributed.Accordingtothecoordinatetransformation,theD⁃Hmethodwasusedtoestablishthekinematicsmodelofthelowerlimbexoskeleton.Thevirtualprototypemodeloflowerlimbexoskeletonwasestablished,andtheki⁃nematicssimulationwascarriedoutbyusingmulti⁃bodydynamicssimulationsoftwareADAMS.Thesimulationresultsverifytheration⁃alityofthetheoreticalmodel,whichlaidthefoundationforthelaterstudyoftheexoskeleton.Keywords:Lowerlimbexoskeleton;Kinematicanalysis;D⁃Hmethod;Simulation0㊀前言下肢残疾及老龄化人口的数量急增,给社会㊁家庭和个人生活带来巨大困难,康复训练与老龄人行走问题成了社会需要解决的一大难题㊂下肢外骨骼能够帮助人类解决这个问题,它可以辅助老年人行走,给他们的日常生活带来极大的方便[1]㊂人体下肢外骨骼能够将机器强大的机械能量与人类智能结合起来[2]㊂目前,下肢外骨骼主要运用于军事,例如BLEEX系列[3],也有应用于医疗,例如HAL系列[4]㊂针对辅助人体行走等问题,设计了一种下肢外骨骼,如图1所示,采用了非拟人型结构设计,与人体无直接绑缚连接,髋关节采用电机驱动,膝关节和踝关节为阻尼装置驱动㊂它可以帮助分担人体质量,有效增强人体的机能,不仅可以用于帮助中老年人行走㊁辅助残疾人行走,还可以应用于某些需要长时间站立㊁行走的工作,以缓解疲劳,提高工作效率㊂图1㊀下肢外骨骼1㊀结构设计1 1㊀自由度分配在研究人体下肢系统的基础上,设置下肢外骨骼双腿具有12个自由度㊂即每条腿的髋关节保留了屈/伸和外展/内收2个自由度,膝关节仅保留了屈/伸1个自由度,而踝关节保留了屈/伸㊁背屈和跖屈3个自由度㊂鞋子可以弯曲㊂1 2㊀机械结构设计在设计外骨骼时考虑了身材的兼容性,外骨骼的机械结构可调节其长度,因此其大腿杆㊁小腿杆应预留一定的调整范围[5]㊂根据GB10000⁃1988‘中国成年人人体尺寸“中测量数据进行设定,采用身高1700mm,体重60kg为标准,大腿杆的平均长度为465mm,小腿杆的平均长度369mm,以此数据设计外骨骼结构㊂1 2 1㊀踝关节设计人体踝关节是小腿和脚的连接处,有3个转动自由度,是一处比较关键和灵活的关节也是承受身体质量最多的关节㊂为了使外骨骼更加符合人体工程学,踝关节采用球铰链接,保留了全部自由度,既可以承受较大负荷,也可以实现3维转动㊂同时,考虑到人体脚踝的脆弱性和踝关节转动角度范围,对其进行保护限位,当球铰上部绕球心转动到一定角度时会与鞋子上的安装孔发生干涉,从而起到角度限位作用㊂为了保证踝关节的柔性连接,增加了圆柱压缩弹簧,可以起到储存能量㊁自动回位及缓冲的作用,如图2所示㊂图2㊀踝关节结构1 2 2㊀髋关节设计髋关节保留了两个转动自由度㊂由于外骨骼穿戴图3㊀行星齿轮传动简图时置于两腿之间,在该位置,无法直接设计出实际的外骨骼髋关节㊂因此,采用如图3所示的行星轮传动机构,将电机安装在大腿板上,通过半偏轴与小齿轮配合,从而带动小齿轮转动,使得电机㊁大腿机构也绕大齿轮中心转动,如图4所示㊂图4㊀髋关节结构座椅连接板与大齿轮采用螺栓连接,螺母紧固,大齿轮留有一定的活动空间,便于旋转转动,从而实现髋关节的外展/内收运动㊂2㊀外骨骼运动学分析2 1㊀坐标系建立在运动时,空间中末端操作器的位姿与一系列关节变化角度之间的关系是机器人运动学的主要研究内容[6]㊂控制下肢外骨骼的过程中,为了能够实时地了解人体所处的运动状态,需要迅速地获得踝关节位姿与各个关节之间的距离㊂而运动学正向求解就是通过关节变量值求出末端控制器在空间笛卡尔坐标系下的位姿;反之,通过机器人末端的位置和姿态,求出所需的关节变量值即为求运动学逆解㊂外骨骼是一系列由关节连接起来的连杆所组成[7],对于串联机器人一般运用D⁃H法来建立运动学模型[8]㊂由于外骨骼两侧的机械结构为左右对称,而人体的步态周期具有周期性,因此仅对单腿结构进行研究,如图5所示,采用D⁃H法对外骨骼机器人右腿建立运动学坐标系[9],基坐标系O0在右腿髋关节处,站立姿态为初始零位㊂获得外骨骼的D⁃H参数表,见表1㊂表中,θi为连杆转角;ai为连杆长度;αi为连杆扭角㊂图5㊀外骨骼运动学模型㊃31㊃第15期吴俊杰等:一种新型助力携行下肢外骨骼设计及仿真㊀㊀㊀表1㊀外骨骼D⁃H参数表连杆iθiaiαi1θ1a10ʎ2θ2090ʎ3θ3a30ʎ4θ4a40ʎ2 2㊀正运动学求解在外骨骼所建立的坐标系的基础上,利用齐次变换矩阵将各个坐标系相互联系起来㊂根据表1给出的D⁃H参数,计算外骨骼相邻两杆的齐次变换矩阵i-1iT:01T=Trans(x1,a1)100a1010000100001éëêêêêêùûúúúúú12T=Rot(z1,θ2)㊃Rot(x2,α2)cosθ20sinθ20sinθ20-cosθ2001000001éëêêêêêùûúúúúú23T=Rot(z2,θ3)㊃Trans(x3,a3)cosθ3-sinθ30a3cosθ3sinθ3cosθ30a3sinθ300100001éëêêêêêùûúúúúú34T=Rot(z3,θ4)㊃Trans(x4,a4)cosθ4-sinθ40a4cosθ4sinθ4cosθ40a4sinθ400100001éëêêêêêùûúúúúú将上述齐次坐标变换矩阵依次相乘可以得到外骨骼的坐标变换矩阵04T=01T㊃12T㊃23T㊃34T:04T=c2c34-c2s34s2a4c2c34+a3c2c3+a1s2c34-s2s34-c2a4s2c34+a3s2c3s34c340a4s34+a3s30001éëêêêêêùûúúúúú(1)其中c1代表sinθ1,c1代表cosθ1,s12代表sin(θ1+θ2),其他类似㊂若令θ1=0,θ2=90ʎ,θ3=145ʎ,θ4=75ʎ,并将有关常量代入到式(1),得到:04T=001a1-0 7660 6430-0 766a4-0 819a3-0 643-0 7660-0 643a4+0 574a30001éëêêêêêùûúúúúú这与人体站立时的位姿一致,证明了外骨骼的D⁃H坐标系与运动学正解是正确的㊂由式(1)可以得到外骨骼踝关节的运动方程为:px=a4c2c34+a3c2c3+a1py=a4s2c34+a3s2c3pz=a4s34+a3s3ìîíïïïï式中:px㊁py㊁pz分别为踝关节在x㊁y㊁z方向上的位移㊂2 3㊀逆运动学求解在工程应用中,逆运动学对于外骨骼的轨迹控制与步态规划更为重要[9]㊂假定已知外骨骼末端位姿矩阵,分别求各关节角度㊂04T=nxoxaxpxnyoyaypynzozazpz0001éëêêêêêùûúúúúú=10T12T23T34T将方程两端同时左乘12T-10㊀1T-1即12T-10㊀1T-10㊀4T=23T23T联立方程组,可得:c3c4-s3s4=c2nx+s2ny=ozs3c4+c3s4=nz=-c2ox-s2oya4c34+a3c3=c2px+s2py-a1c2a4s34+a3s3=pys2px-c2py-a1s2=0ìîíïïïïïï可求得:θ2=Atanpypx-a1θ4=Acosc22(p2x+a21+2a1px)-2s2c2(pxpy+a1py)-a24-a232a3a4θ3=Atannzozæèçöø÷-θ4求解反三角函数往往造成机器人运动学逆解具有多个,为此必须结合实际情况与机械结构特点做出判断,以选择合适的解㊂3 下肢外骨骼仿真利用SOLIDWORKS完成对外骨骼机械结构的几何建模,并导入ADAMS进行设定,建立虚拟样机,模拟下肢外骨骼在虚拟环境中的运动过程,直观地分析外骨骼运动学[10-11]㊂由于文中仅研究外骨骼应用于直线助力辅助行走,所以仅保留人体矢状面内的关节运动,其余平面的关节设置为固定约束㊂依据外骨骼运动特性,以前述公式为基础设置驱动数据[12],通过仿真获得了踝关节在运动时Y㊁Z方向的位移曲线和髋关节与膝关节的输出角度变化曲线,如图6㊁图7所示㊂㊃41㊃机床与液压第46卷㊀图6㊀踝关节Y㊁Z方向㊀㊀㊀㊀图7㊀髋关节与膝关节输的仿真位移曲线出角度变化曲线由图6获得踝关节在运动过程中的位姿变化曲线,踝关节在Y㊁Z方向做往复运动,在Z方向位移变化最大,为前进方向㊂对比踝关节位移的图6仿真曲线与图8理论曲线,如表2所示,可知两种结果中位移变化存在一定的误差,但总体相差不大,在误差允许范围之内,理论曲线更加连续平缓㊂外骨骼髋关节与膝关节的输出角度变化曲线符合人体正常运动的步态,证明可以实现携带人体行走㊂图8㊀踝关节Y㊁Z方向的理论位移曲线表2㊀踝关节位移值时间/s00 51 01 52 0踝关节仿真Y位移/mm0-36003217踝关节理论Y位移/mm2-365-32326-8髋关节仿真Y位移/mm01350653髋关节理论Y位移/mm-7124135774㊀总结介绍了下肢外骨骼的基本结构设计,对自由度进行分配,并以此为基础,利用坐标变换与D⁃H法建立运动学模型,求出机器人正㊁逆运动学解,建立脚踝部与各关节角度之间的关系㊂最后,根据现实应用环境,对外骨骼运用仿真软件ADAMS进行运动学仿真㊂仿真结果证明了外骨骼结构的合理性,行走步态与人的步态相同,为后续工作提供了理论基础与数据参考㊂参考文献:[1]沈凌,孟青云,喻洪流.基于虚拟样机技术的下肢假肢结构设计与仿真[J].工程设计学报,2011,18(1):34-37.SHENL,MENGQY,YUHL.DesignandSimulationofLegProsthesisStructureBasedonVirtualPrototypeTechnology[J].JournalofEngineeringDesign,2011,18(1):34-37.[2]YANGCJ,NIUB,CHENY.AdaptiveNeuro⁃fuzzyControlBasedDevelopmentofaWearableExoskeletonLegforHu⁃manWalkingPowerAugmentation[C]//IEEE/ASMEIn⁃ternationalConferenceonAdvancedIntelligentMechatron⁃ics.Monterey.California,2005:467-472.[3]ZOSSA,KAZEROONIH,CHUA.OntheMechanicalDe⁃signoftheBerkeleyLowerExtremityExoskeleton(BLE⁃EX)[C]//IEEE/RSJInternationalConferenceonIntell⁃gentRobotsandSystems.Edmonton,2005:3132-3139.[4]王伟.可穿戴机器人的研究现状和面临的挑战[J].机器人技术与应用,2013(4):12-16.[5]赵彦峻,葛文庆,刘小龙,等.外骨骼机器人设计及其机械结构的有限元分析[J].机床与液压,2016,44(3):10-13.ZHAOYJ,GEWQ,LIUXL,etal.DesignofExoskeletonRobotandFiniteElementAnalysisofMechanicalStructure[J].MachineTool&Hydraulics,2016,44(3):10-13.[6]崔谨想.下肢外骨骼机器人系统建模与仿真实验研究[D].哈尔滨:哈尔滨工业大学,2014.[7]理查德㊃摩雷,李泽湘,夏恩卡.萨思特里.机器人操作的数学导论’M].北京:机械工业出版社,1998:45-49.[8]许路航,王钰,王志乐.上肢外骨骼运动的逆向求解仿真[J].科学技术与工程,2011,11(14):3331-3335.XULH,WANGY,WANGZL.ReserveSolvingandSimu⁃lationontheMotionofUpper⁃limbExoskeleton[J].ScienceTechnologyandEngineering,2011,11(14):3331-3335.[9]SANTISAD,SICILIANOB.InverseKinematicsofRobotManipulatorswithMultipleMovingControlPoints[M]//LENARC㊅IC㊅J,WENGERP.AdvancesinRobotKinematics:AnalysisandDesign.Berlin:SpringerNetherlands,2008:429-438.[10]易嘉伟,程文明,濮德璋.携行式外骨骼下肢运动学分析与仿真[J].机械设计制造,2014(2):171-174.YIJW,CHENGWM,PUDZ.TheKinematicsAnalysisandSimulationofLowerExtremityPortableExoskeleton[J].MachineryDesign&Manufacture,2014(2):171-174.[11]梁青,宋宪玺,周烽,等.基于ADAMS的双足机器人建模与仿真[J].计算机仿真,2010,27(5):162-165.LIANGQ,SONGXX,ZHOUF,etal.ModelingandSimu⁃lationofBipedRobotBasedonADAMS[J].ComputerSimulation,2010,27(5):162-165.[12]刘小龙,赵彦峻,葛文庆,等.医疗助力下肢外骨骼设计及动力学仿真分析[J].工程设计学报,2016,23(4):327-332.LIUXL,ZHAOYJ,GEWQ,etal.DesignandDynamicsSimulationAnalysisofMedicalDisabledLowerLimbExo⁃skeleton[J].ChineseJournalofEngineeringDesign,2016,23(4):327-332.(责任编辑:卢文辉)㊃51㊃第15期吴俊杰等:一种新型助力携行下肢外骨骼设计及仿真㊀㊀㊀。
人体下肢外骨骼仿生

人体下肢外骨骼机理分析xx(xx,xxxx,xxxx)摘要:本论文研究穿戴型下肢外骨骼机器人机构。
所研究的外骨骼是一种可以穿戴于人体的机械装置。
这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的远行、负重等任务。
这种外骨骼也可以用来检测人体运动信息,作为康复医疗器械使用。
下肢穿戴外骨骼机器人是一种具有双足步行特征的典型的人机一体化系统。
关键词:穿戴外骨骼;助力机器人;机构设计;仿真分析ANALYSIS AND DESIGN OF LOWER EXTREMITYEXOSKELETON(MechanicalManufacturingandAutomation.,No.:xxxxxxxx,Email:****************,phone:xxxxxxxxxxx) Abstract:This paper researched a kind of wearable lower extremity exoskeleton robot. The exoskeleton is a mechanism which could match the human body. It relied on human motion information to control the robot, and accomplish the travel, loading and other tasks that can not be completed by people's own capacity lonely. The exoskeleton can also be used to detect human motion information, and as the rehabilitation of medical devices. Lower extremity exoskeleton robot is a kind of typically man-machine integrated system with some biped walking robots’ characters.Keywords:Wearable exoskeletons; Assist robot; Mechanical design; Simulation andAnalyze1引言(Introduction)外骨骼是一种给人穿戴的人机一体化智能机械装置,它将人类的智力和机械装置的“体力”结合在一起,靠人的智力来控制机械装置,通过机械装置来完成仅靠人的自身能力无法单独完成的任务。
下肢外骨骼运动康复机器人的动力学分析与仿真
下肢外骨骼运动康复机器人的动力学分析与仿真
王长剑;赵一平
【期刊名称】《淮北师范大学学报(自然科学版)》
【年(卷),期】2024(45)2
【摘要】通过对正常人体的步态数据进行分析,提出一种下肢外骨骼机器人的鲁棒自适应PD控制策略,首先运用NOKOV三维红外捕捉系统收集正常人体步态信息,然后运用拉格朗日法分别建立单脚支撑和双脚支撑动力学模型,再根据构建的模型选取适应的控制器,最后通过MATLAB仿真验证设计的控制方式的稳定性与数据的正确性。
设计的机器人髋关节和膝关节都能快速跟随到期望角度,同时通过相似函数验证机器人的运动轨迹与人体运动轨迹高度相似,表明机器人具有良好舒适性,也验证数据正确性。
说明提出的控制方法是有效的,可为后续驱动源的选择等提供参考,有助于受伤运动员进行康复运动。
【总页数】8页(P74-81)
【作者】王长剑;赵一平
【作者单位】淮北理工学院体育教学部;淮北师范大学体育学院
【正文语种】中文
【中图分类】G818.3
【相关文献】
1.人体下肢外骨骼康复机器人的动力学分析与研究
2.下肢外骨骼康复机器人的动力学建模及神经网络辨识仿真
3.下肢康复外骨骼机器人动力学分析及仿真
4.外骨骼
型下肢康复机器人结构设计与动力学分析5.脑卒中患者下肢外骨骼康复机器人步态规划与运动学仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
下肢外骨骼虚拟样机设计研究
A b s t r a c t : G a i t a n a l y s i s i s i n d s i p e n s a b l e t e c h n o l o g y i n t h e d e s i g n o 厂 e x o s k e l e t o n r o b o t . U s i n g h u m a n g a i t m o t i o n l a w a s t h e f o u n d a t i o n t h e l o w e r l i mb e x o s k e l e t o n m o t i o n a t t i t u d e c o n t r o l ,i t i s b e n e it f f o T t h e a c h i e v e m e n t g o o d m a n — m ch a i n e m tc a h i n g . T h e V i c o n m o t i o n a n a l y s s i s y s t e m s i u s e d f o r k i n e m t a i c e x p e r i m e n t s a n d a n a l y s i s . O n t h e b a s s i h u ma n- c o m p u t e r i n t e r ct a i o n , h u m a n f u n c t i o n m o t i o n i s e x p a n d e d , S O i t g e t s e x t e n s i v e tt a e n t i o n a n d a p p l i c ti a o n i n t h e l o w e r l i m b d y s f u n c t i o n
下肢外骨骼机构的研究与仿真

人体下肢运动机理
人体下肢运动机理
人体行走时的下肢肌肉活动
参考文献
• 夏昊昕. 下肢康复训练机器人的研究[D]. 哈尔滨 工程大学 , 2003 • 王小龙.基于虚拟现实手臂外骨骼康复系统的 研究[D]. 河北工业大学, 2003 • 王辉. 智能假肢的控制机理及控制系统研究[D] 河北工业大学 , 2005 . • 牛彬. 可穿戴式的下肢步行外骨骼控制机理研 究与实现[D]. 浙江大学 , 2006 • 赵彦峻. 人体下肢外骨骼工作机理研究[D]. 南京 理工大学, 2006
浙江大学杨灿军教授设计的可穿戴式的下肢 步行外骨骼机构.采用了三个旋转运动副, 并分别将其布置在外骨骼上人体下肢三个关 节的相应位置,用来模拟三个关节的转动, 旋转副采用销轴方式来具体实现。 另外,为了提高外骨骼的运动灵活性以及方 便行进过程中的转向,在髓关节处还布置了 额外的旋转副.
国内外研究现状
国内外研究现状
新加坡南洋理工大学的罗锦发教授(Low KinHuat)研发的Lower Extremity Exoskeleton.该 系统主要由两个部分所组成:内侧外骨骼和 外侧外骨骼.
国内外研究现状
内侧的外骨骼绑缚在人的下肢上,利用关节 处的编码器来测量行走时的关节角度信号; 外侧的外骨骼用来提供助力,根据内侧外骨 骼测得的关节角度值通过电机来提供动力。 他们的另外一个主要工作在该原型系统上利 用零力矩点(ZMP)理论进行了外骨骼行走稳 定性方面的研究。
下肢外骨骼机构的研究与仿真
Agenda
• • • • 国内外研究现状 人体行走机理分析 下肢外骨骼的建模与仿真 参考文献
国内外研究现状
Hardyman,该系统由通用电气(General Electric)研发,用于增强士兵的持重及负重 能力,操作者操纵内侧的外骨骼,由液压驱 动的外侧外骨骼对人提供助力,但是它的最 大的缺点就是笨重、不稳定且不安全。重 1500磅,30个自由度.1960年 图片来自 /~hpm/project.archi ve/Image.Archive/other.robots/Hardyman.jpg
下肢康复外骨骼机器人动力学分析及仿真
下肢康复外骨骼机器人动力学分析及仿真一、本文概述随着医疗科技的快速发展,下肢康复外骨骼机器人作为一种新型康复设备,正日益受到研究者和医疗工作者的关注。
本文旨在对下肢康复外骨骼机器人的动力学特性进行深入分析,并通过仿真实验验证其理论分析的准确性。
文章首先介绍了下肢康复外骨骼机器人的研究背景和应用意义,阐述了其动力学分析的重要性。
随后,本文详细阐述了下肢康复外骨骼机器人的动力学建模过程,包括机器人的运动学模型、动力学模型以及控制模型的建立。
在建模过程中,考虑了机器人的结构特点、运动规律以及人机交互等因素,确保了模型的准确性和实用性。
在完成动力学建模后,本文利用仿真软件对下肢康复外骨骼机器人的动力学特性进行了仿真实验。
仿真实验包括了机器人在不同运动状态下的动力学响应、人机交互过程中的力传递特性以及控制策略的有效性等方面。
通过仿真实验,本文验证了动力学模型的正确性,并为后续的实物实验提供了理论支持。
本文总结了下肢康复外骨骼机器人动力学分析及仿真的主要研究成果,并指出了未来研究方向。
通过本文的研究,不仅有助于深入理解下肢康复外骨骼机器人的动力学特性,还为优化机器人设计、提高康复效果以及推动医疗康复领域的发展提供了有益的参考。
二、下肢康复外骨骼机器人概述下肢康复外骨骼机器人是一种辅助人体下肢运动,帮助进行康复训练的先进医疗设备。
这种机器人通过精密的机械结构和智能控制系统,能够实时地感知并适应穿戴者的运动意图,提供必要的助力或阻力,以达到改善运动功能、增强肌肉力量、促进神经恢复等康复目标。
下肢康复外骨骼机器人通常由支架、传感器、执行器、控制系统等部分组成。
支架负责支撑和保护穿戴者的下肢,同时提供运动的轨迹和范围。
传感器则负责实时感知穿戴者的运动状态、肌肉力量、姿态等信息,为控制系统提供决策依据。
执行器则根据控制系统的指令,驱动机械结构产生相应的动作,提供助力或阻力。
在动力学分析方面,下肢康复外骨骼机器人需要考虑穿戴者的运动学特性和动力学特性,以及机器人自身的机械特性、控制特性等因素。
下肢外骨骼机器人结构设计和动力学仿真_杨宗林
下肢外骨骼机器人结构设计和动力学仿真杨宗林,曾亿山,王善杰(合肥工业大学机械与汽车工程学院,安徽合肥230009)来稿日期:2015-07-09作者简介:杨宗林,(1991-),女,安徽六安人,硕士研究生,主要研究方向:机器人。
1引言随着现代军事的发展和对单兵作战能力要求的提高,步兵正在按照机动力、防护力、进攻力和信息力分别提高的路径发展,单个士兵所携带的装置也日趋复杂、沉重[2]。
外骨骼机器人是一种并联在人体上机电一体化装置,随人体一起运动[3],能够提供助力,减少人体疲劳。
目前国内外的外骨骼机器人驱动方式主要有液压、气动、电动三中常用方式[4]。
液压驱动系统虽然体积小、推力大,但可靠性差、维护麻烦[5]。
气动驱动系统推力偏小,不能实现精确的中间位置调节[6]。
本设计将采用电缸驱动的方式,其主要优点有:精确度高,调速方便,噪音小等。
通过对下肢外骨骼机器人(EXO-P )结构的设计和动力学仿真,可以为电缸的选型以及控制提供依据。
为了做出一种能够快速响应的外骨骼机器人,EXO-P 选用伺服电缸的方式。
但是仿人步态规划建模和动力学仿真是个问题。
现国内外的外骨骼机器人(像美国加州大学伯克利分校的BLEEX 系统[7],中科院的外骨骼机器人)在结构设计阶段的动力学仿真所用的运动轨迹,是将机构简化计算出来的。
这种方法太过理论化,没有实际应用意义。
为此,EXO-P 采用了NDI 三维动态测量方法。
进行仿人步态规划建模,在此基础上,对规划的步态进行动力学仿真,并得到了结果,切实解决了伺服电缸选型的实际问题。
2结构设计2.1自由度的分配在人体骨骼系统研究的基础上,设计出可穿戴外骨骼机器人的自由度分配,如图1所示。
其中,髋关节和踝关节具有屈曲/伸展、转动和外展/内收三个自由度,膝关节具有屈/伸自由度,脚踝有屈曲/伸展,屈曲/伸展两自由度。
脚底为橡胶,可弯曲。
摘要:为增加单兵作战能力,以人为核心,同时具有机械的高负载能力、耐力、长时间运动能力,设计出一款结合人工智能与机械的助力机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国内外研究现状
由前苏联圣彼得堡的研究者开发,重87千克。 1970年
国内外研究现状
由前南斯拉夫的Vukobratovic开发,用于截 瘫病人的行走恢复治疗,该系统由气缸驱 动.1971年
国内外研究现状
由日本筑波大学的山海嘉之教授所领导的 Cybernics Lab开发的HAL(Hybrid Assistive Limb) 系列下肢外骨骼用于协助步态紊乱的病人 行走。HAL-3是套下肢装,专门设计来帮助 下肢残障者或是老人们,能方便地进行日常 生活中的许多动作,像是走路、上下楼梯等 等。它采用了角度传感器、肌电信号传感器 和地面接触力传感器等传感设备来获得外骨 骼和操作者的状态信息。它的所有的电机驱 动器、测量系统、计算机和无线局域网络, 以及动力供应设备都整合到背包中。使用装 在腰间的电池进行供电。HAL拥有混合控制 系统,包括自动控制器进行诸如身体姿态的 控制,以及基于生物学反馈和预测前馈的舒 适助力控制器。重22公斤
图片来自http://www.we.kanagawa-it.ac.jp/~yamamoto_lab/pas/index.htm
国内外研究现状
瑞士苏黎士联邦工业大学(ETH)在汉诺威2001年世界工业展览会上展出的名 为LOKOMAT的康复机器人模型。
图片来自 /0105910/images /lokomat_2.jpg
下肢外骨骼机构的研究与仿真
Agenda
• • • • 国内外研究现状 人行走机理分析 下肢外骨骼的建模与仿真 参考文献
国内外研究现状
Hardyman,该系统由通用电气(General Electric)研发,用于增强士兵的持重及负重 能力,操作者操纵内侧的外骨骼,由液压驱 动的外侧外骨骼对人提供助力,但是它的最 大的缺点就是笨重、不稳定且不安全。重 1500磅,30个自由度.1960年 图片来自 /~hpm/project.archi ve/Image.Archive/other.robots/Hardyman.jpg
浙江大学杨灿军教授设计的可穿戴式的下肢 步行外骨骼机构.采用了三个旋转运动副, 并分别将其布置在外骨骼上人体下肢三个关 节的相应位置,用来模拟三个关节的转动, 旋转副采用销轴方式来具体实现。 另外,为了提高外骨骼的运动灵活性以及方 便行进过程中的转向,在髓关节处还布置了 额外的旋转副.
国内外研究现状
国内外研究现状
日本神奈川(Kanagawa)工科大学Yamamoto教 授研发的的Wearable Power Assit Suit.外套选 用了微型气泵、便携式镍锡电池和嵌入式微 处理器使系统的动力提供和控制系统极其小 型化。整个装置的金属结构由硬铝合金加工 而成,重约30公斤。
图片来自www.we.kanagawa-it.ac.jp
国内外研究现状
HAL-5,在2005年日本爱知世博会上展出,不 但能帮助使用者走路,还有上半部能辅助使 用者的手臂,使用者穿戴上这种装置,就能 提起比原本所能负荷还要更重40公斤的东西。 重15公斤,售价14000美元-19000美元
图片来自 http://sanlab.kz.tsukuba.ac.jp/english/img/r_h al.png
国内外研究现状
肘部、腰部和膝部的关 节驱动采用新式的可直 接驱动的旋转位移式气 动驱动器,肌肉力量信 号的采集采用布置于上 臂、大腿和腰部的肌肉 硬度传感器测得。微处 理器在收到传感器的输 出信号之后,计算出保 持某个姿势的所需的关 节力矩,然后输出控制 信号给PWM驱动电路, 以驱动旋转气缸的动作。
浙江大学杨灿军教授设计的可穿戴式的下肢 步行外骨骼机构.采用了三个旋转运动副, 并分别将其布置在外骨骼上人体下肢三个关 节的相应位置,用来模拟三个关节的转动, 旋转副采用销轴方式来具体实现。 另外,为了提高外骨骼的运动灵活性以及方 便行进过程中的转向,在髓关节处还布置了 额外的旋转副.
国内外研究现状
新加坡南洋理工大学的罗锦发教授(Low KinHuat)研发的Lower Extremity Exoskeleton.该 系统主要由两个部分所组成:内侧外骨骼和 外侧外骨骼.
国内外研究现状
内侧的外骨骼绑缚在人的下肢上,利用关节 处的编码器来测量行走时的关节角度信号; 外侧的外骨骼用来提供助力,根据内侧外骨 骼测得的关节角度值通过电机来提供动力。 他们的另外一个主要工作在该原型系统上利 用零力矩点(ZMP)理论进行了外骨骼行走稳 定性方面的研究。
国内外研究现状
加州大学伯克利分校的人体工程实验室在 2004年推出的BLEEX(BkereleyLowerExert而 tyExoskeleton)外骨骼系统.由两条动力驱动的 仿生金属腿、一个动力供应单元和一个用 于负重的背包架组成。该系统使用混合动力, 即使用液压能驱动双腿行走,同时对随身携 带的计算机供应电能。 图片来自 http://64.202.120.86/upload/image/articles/2 007/engine-on-a-chip/bleex-exoskeleton.jpg
图片来自 /0105910/imag es/lokomat_1.jpg
国内外研究现状
德国弗朗霍费尔研究所(FRANHOFER INSTITUT IPK)研制的绳驱动式康 复机器人.
国内外研究现状
清华大学研制的卧式下肢康复训练机器人样机
国内外研究现状
国内外研究现状
外骨骼上共安装有40多个传感器和液压驱动 器,它们共同构成了一个局域网络,该网络 向计算机提供必要的信息,计算机根据这些 信息了解操作者当前的状态,并据此对人的 负载情况实时进行必要的调整。操作者身着 重达100磅的外骨骼,同时背上70磅的背包 在房间里行走,他所感觉到的重量只有5磅。 图片来自/CV/Ryan/R1BLEEX.jpg