力士乐REXROTH伺服参数设置
博世力士乐比例伺服阀教程

14th –15th January 2004, Bosch Rexroth in China4 WRD(E) 5X NG 10, 16, 25, 32, 35Q max 3000 l/min 4/3RV NG 10, 16, 25, 32Q max 3500 l/min4 WRLE(H) NG 6/10Q max 180 l/min 4 WRA(E) 2X NG 6 / 10Q max 75 l/min 4 WRE(E) 2X NG6 / 10Q max 180 l/min 4 WRZ(E) 7X NG 10, 16, 25, 32, 52Q max 2800 l/min 4 WRK(E) 2X NG 10, 16, 25, 32, 35Q max 3000 l/min Proportional ValvesHigh Response Control Valves 4 WS(E)2EM 5X NG 10Q N 90 l/min (bei Δpv 70 bar)4 WSE3EE NG 16, 25, 32Q N 850 l/min (bei Δpv 70 bar)4 WS(E)2EM 2X NG 6Q N 20 l/min (bei Δpv 70 bar)Servo Valves 4 WRPE NG 10, 16, 25,32Q max 3500 l/min 4/3HRV1 NG 6Q max 24 l/min 4/3WV1 NG 6 /10Q max 120 l/min 4/3WV1 OBE NG 6/ 10Q max 120 l/min 4/3WV1 OBE NG 6 / 10Q max 100l/min HIHIHIHI HIHI HI HI14th–15th January 2004, Bosch Rexroth in China14th–15th January 2004, Bosch Rexroth in China14th –15th January 2004, Bosch Rexroth in China开环比例液压系统)传统的结构形式: 4WRA4精度较低, 响应较慢4滞环:≤5% ;灵敏度: ≤0.5% ;反向域: ≤ 1 %4相频特性(-900, 50%输入信号):10 ~ 25Hz14th –15th January 2004, Bosch Rexroth in China4WRE …注意:不同系列的比例伺服阀的放大器(尤其外置放大器),其电气参数不同!即外置放大器一般不可更换!不同系列的比例伺服阀的安装尺寸有的相同,有的不同,需进行一下核对!14th–15th January 2004, Bosch Rexroth in China14th –15th January 2004, Bosch Rexroth in China开环比例液压系统先导式比例方向阀:4WRZ电比例控制多路阀的仿制品 精度较低, 响应较慢滞环:≤6% ;Proportional Directional Valve 4WRZE-7XFeatures 4WRZE-7X...Piloted Proportional Valve with and without O n B oard E lectronicsPilot pressure controlled by a pressure control valve D3High reliability and simple operationAt loss of electrical power or cable brake, main spool is positioned in stroke center positionmax. allowable contamination level of the fluid is class 9 to NAS 1638, or 18/15 to ISO 440614th–15th January 2004, Bosch Rexroth in China14th–15th January 2004, Bosch Rexroth in China14th–15th January 2004, Bosch Rexroth in China14th –15th January 2004, Bosch Rexroth in China开环比例液压系统DBETE…–精度一般, 响应较慢–Q max =2 l/min.–滞环:≤±1.5 %–重复精度: ≤±2 %–线性度:最高压力的±3.5 %–开关时间:30~150ms14th –15th January 2004, Bosch Rexroth in China直控式,带反馈;DBETRE …(PV1-DBV …)DBETRE…–精度较高, 响应很快–Q max =1 l/min.–滞环:≤0.2 %–温漂: ≤1 % ,当ΔT=400C–开关时间:10ms (10%)~30ms(100%)14th –15th January 2004, Bosch Rexroth in China先导式,不带反馈;(Z)DBE(E) (6)(Z )DBE (E )…–精度一般, 响应较快–Q max =30 l/min.–滞环:≤ 1.5 %–重复精度:≤ 2 %–线性度:±3.5 %–开关时间:50ms(10%)~80ms (90%)14th –15th January 2004, Bosch Rexroth in China先导式,不带反馈;DB …6?(PV2-DBV …)DB…–精度一般, 响应较慢–Q max =40 l/min.–滞环:≤ 4 %–制造公差: ≤10 %–开关时间:200ms (100%+)~250ms (100%—)HI 14th–15th January 2004, Bosch Rexroth in China14th –15th January 2004, Bosch Rexroth in China先导式,不带反馈;DBEM(E)…16;25DBEM(E)…–精度一般, 响应较慢–Q max =600 l/min.–滞环:≤±1.5 %–线性度:≤±3.5 %–重复精度:≤±2 %–制造公差: ≤±2.5 %–开关时间:150ms (100%+)~150ms (100%—)先导式,带反馈;DB (10)DB…DBV –精度较高, 响应较快–Q max=。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
博世力士乐伺服泵SvP安装手册(新软件版本V4 14)_V01
序号 1 2 3 4 5 6 7 8 9 10* 11
1.2
客户自备部件清单
部件名称 数量
R901296641
序号
规格 Rexroth:
HM 20-1X/250-H-K35
用途
备注
1
压力传感器
1
R900779509 4PE11509
检测泵的出口 请确定压力传感器 压力 的响应时间参数
其它品牌:电压 0-10V 压力 200/250/350bar 2 3 4 5 D-SUB 插头 联轴器 钟型罩 固定支架 1 1 1 1 D-SUB 15 芯 孔状插头 具体尺寸请参阅相应电机和泵 规格说明 具体尺寸请参阅相应电机和泵 规格说明 具体尺寸请参阅相应电机和泵 规格说明 1 套,公制 T10-T30
电源连接 驱动器需要的 24V 电源(需配置独立 24V 电源,每个驱动器要求电流 1A)
HCS02.1E HCS03.1E
驱动器动力电源控制方式(3AC400-500 +10%-15% 50/60HZ):
注:1.电机动力电缆三相不得错序。 2.外部电源经扼流圈(HNL)后再接入驱动器X3接口 3.由驱动器检测信号(X31.1/X31.2)控制中间继电器,进而控制动力电源接通。 4.将后门急停的常闭触点接入24V和继电器触点的X31.1之间。 5.断路器输入电缆规格选择:
__4.在固定支架底部安装硬度合适的避震缓冲垫 __5. 地脚螺栓需加平垫和弹簧片固定拧紧 __6.确保电机风扇与机架之间通风性良好并留有足够空隙,以便电机散热
系统流量(L/min) 33 48 60 75 100 120 150 190 240 300
吸油管内径 D(mm) 30 36 40 45 52 56 63 71 80 89
力士乐伺服阀放大器说明书
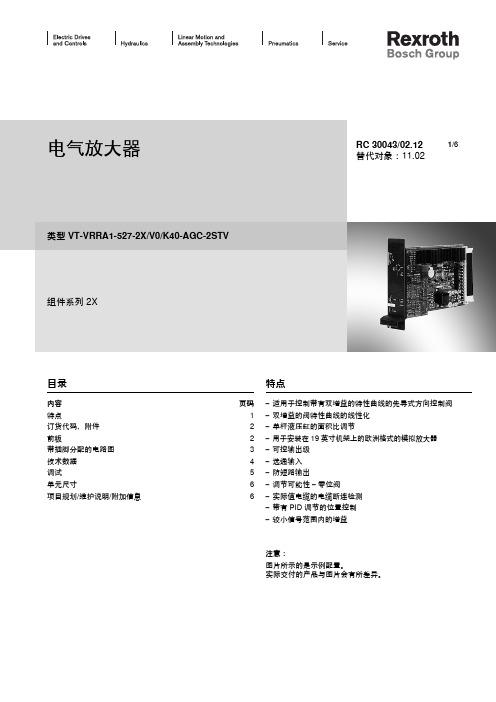
电气放大器类型 VT-VRRA1-527-2X/V0/K40-AGC-2STV组件系列 2XRC 30043/02.12替代对象:11.02目录内容 页码特点1订货代码,附件 2前板2带插脚分配的电路图 3技术数据 4调试 5单元尺寸6项目规划/维护说明/附加信息6特点– 适用于控制带有双增益的特性曲线的先导式方向控制阀– 双增益的阀特性曲线的线性化– 单杆液压缸的面积比调节– 用于安装在 19 英寸机架上的欧洲格式的模拟放大器– 可控输出级– 选通输入– 防短路输出– 调节可能性 – 零位阀– 实际值电缆的电缆断连检测– 带有 PID 调节的位置控制– 较小信号范围内的增益注意:图片所示的是示例配置。
实际交付的产品与图片会有所差异。
1/6订货代码,附件前板首选类型放大器类型材料编号用于带电气位置反馈和弯折的特性曲线的先导式方向控制阀VT-VRRA1-527-20/V0/K40-AGC-2STV08114050684WRL 10...35 V/V1...P-3X...4WRL 10...25 V/V1...P-3X...-750液压组件:用于具有电气反馈的阀 = R阀类型:方向控制阀 = R控制模拟= A选件K40-AGC-2STV = 在40%位置处双增益的先导式方向控制阀客户定制型号 V0 =标准样本型号2X =组件系列 20 至 29(20 至 29:技术数据和插脚分配不变)以下类型的序列号:527 =先导控制阀规格 6单杆液压缸的面积比调节较小信号范围内的增益粗调节精确调节VT-V RR A 15272X V0K40-AGC-2STV配套的板卡插槽:– 开放式板卡插槽 VT 3002-1-2X/32F (请参阅样本 29928)。
仅限用于控制柜安装!0带插脚分配的电路图控制零位控制零位电位计电源启用信号输入错误技术数据(有关这些参数之外的应用,请务必向我们咨询!)在 z2 – b2 处的电源电压 UB 公称电压 24 V =,电池电压 21…40 V,整流后的交流电压 Ueff= 21...28 V(单相,全波整流器)单独在 z2 – b2 处的滤波电容器建议:电容模块 VT 11110(请参阅样本 30750)(只有当 UB的波动值 > 10 % 时方可使用)阀线圈最大值 A/VA 2.7/40(先导控制阀规格 6)最大电流消耗 A 1.7电流消耗可能会随 最小 UB和到控制线圈的极限电缆长度增加功耗(典型值) W37输入信号(控制值)b20:0...±10 Vz20:0...±10 V }差动放大器(Ri= 100 kΩ)信号源b32,z32(10 mA)的电位计 10 kΩ,电源 ±10 V 或外部信号源启用输出级在 z16,U = 8.5...40 V,Ri= 100 kΩ,前板上的 LED(绿色)亮起位置传感器电源b30:–15 Vz30:+15 V先导控制阀实际值信号b22:0...±10 V实际值参考位b24主级实际值信号b26:0...±10 V实际值参考位b28线圈输出b6 – b8 I最大定时电流控制器2.7 A放大器与阀之间的电缆长度线圈电缆: 20 至 20 m 1.5 mm220 至 60 m 2.5 mm2位置传感器: 4 x 0.5 mm2(已屏蔽)主要特点 实际值电缆的电缆断连防护,带有 PID 调节的位置控制,脉冲输出级,具有较短启动时间的快速通电和快速断电,防短路输出,双增益流量特性曲线的线性化调节 零电位通过微调电位计 ±5 % 进行调节,单杆液压缸的面积比调节,较小信号范围内的增益LED 显示 绿色: 启用,黄色: 电缆断连实际值,红色: 欠电压(UB过低)错误消息– 电缆断连实际值– UB 过低– ±15 V 稳定z22:集电极开路输出到 +UB 最大 100 mA;无错误:+UB电路板格式 mm(100 x 160 x 大约 35)/(W x L x H)使用前板为 7 TE 的欧洲格式插入式连接连接器 DIN 41612 – F32环境温度 °C0...+70存储温度范围 °C–20...+70重量 m0.39 kg注意:电源零位 b2 和控制零位 b12 或 b14 或 z28 必须单独通向中心接地(零点)。
Rexroth力士乐伺服电机如何调试

Rexroth力士乐伺服电机如何调试?德国Bosch Rexroth/力士乐伺服电机分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
Rexroth/力士乐伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
我们在购买回力士乐伺服电机后,要详细阅读说明书,然后根据说明书进行操作;安装前要对伺服电机进行检查是否完好无损,是否有部件遗漏等。
那么Rexroth力士乐伺服电机如何调试?在调试过程中应该注意哪些细节呢?下面博扬小编将为您介绍德国Bosch Rexroth/力士乐伺服电机的调试方法及步骤:Rexroth力士乐伺服电机一、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
二、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置三、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
力士乐驱动器使用说明书
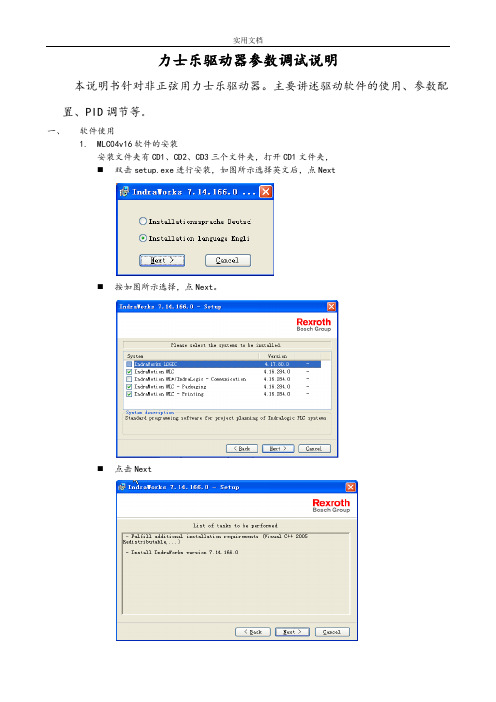
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
中文力士乐03系列DKC伺服驱动器参数手册
德国力士乐伺服驱动器参数说明书
ECODRIVE03 设备一般自动化 本机具有串行实时通信系统,模拟和并行接口。
版权所有
INDRAMAT 有限公司,1999 传输,以及本文件复制,商业 使用或将其内容不得沟通无 明确的书面许可。违反这些规定将要求 赔偿。为实施专利或者发行版权所有 注册外观设计。 (德国工业标准 34-1) 保留所有权利就这个文件的内容 和可用性的产品。 INDRAMAT 有限公司· Bgm.,博士,纳贝尔- STR 基因。 2 ·的 D – 97816 加尔各答 电话 09352/40-0 ·发送 689421 ·传真 09352/40-4885 部完(OS/TH) 本文件印在无氯漂白纸。
前言
本说明书由 779K 于 2010 年 11 月 15 日用谷歌翻译 系统完成翻译,对于翻译之准确不做保证,仅供各位同 行在不急需时参考。在本说明书的后半部分,附有英文 原版说明书,如遇到不能理解之词汇,读者可以再次翻 译更正。翻译此说明书耗时 30 多小时,时间匆促,书中 错误部分希望各位同仁继续更正发布,因为目前参数中 文说明书网上基本没有。
有效期
出版
注意:
总结文件 - 概述
Hale Waihona Puke 内容1 一般资料 1-1 使用本手册............................................... ................................ 1-1 定义................................................. ............................................ 1-2 2 月 2 日至 1 日
中文力士乐 系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
Rexroth IndraDrive Cs ACS01 伺服驱动器 产品手册说明书
Rexroth IndraDrive Cs ACS01伺服驱动器版本03产品手册R912008283Rexroth IndraDrive Cs ACS01伺服驱动器产品手册DOK-INDRV*-ACS01******-PR03-ZH-PRS-6d0559b3a9217a2a0a347e8600d30991-3-zh-CN-7●Rexroth IndraDrive Cs 系统概述●Rexroth IndraDrive Cs 系统组件组合方式说明●Rexroth IndraDrive Cs 系统组件选择●操作规范●系统特性应用说明出版颁发日期备注012020-01第一版022020-04功能新增032020-06参数更新版权© 博世力士乐(西安)电子传动与控制有限公司 2020保留所有权利, 也保留包括任何使用、利用、翻印、编辑、转让以及申请知识产权的权利。
责任规格数据仅用于产品说明,如果未在合同中明确规定,不得视为对特性的保证。
本公司保留关于该文档内容和产品可用性的所有权利。
题目文件类型文件类型代号内部存档附注文件用途更改过程Rexroth IndraDrive Cs ACS01伺服驱动器Rexroth IndraDrive Cs ACS01伺服驱动器 I目录目录页数1 系统介绍 (1)1.1 Rexroth IndraDrive Cs 系列 (1)1.1.1 概述–Rexroth IndraDrive Cs (1)1.1.2 行业应用 (2)1.1.3 特性 (3)1.2 系统配置 (5)1.2.1 系统结构 (5)1.2.2 驱动器组件 (6)2 安全使用说明 (9)2.1 合理使用 (9)2.1.1 使用须知 (9)2.1.2 应用场合 (9)2.2 不当使用 (10)2.3 使用安全说明 (10)2.3.1 安全使用要求 (10)2.3.2 使用不当引发的危险 (10)2.3.3 与电气元件和外壳接触的防护 (10)2.3.4 危险动作的防护 (11)2.3.5 与高温部件接触的防护 (12)2.3.6 电池安全 (12)2.4 警示词和安全提示符号 (13)3 组件组合 (15)3.1 各组件简介 (15)3.1.1 ACS01---简要说明及设计构成 (15)3.2 配置驱动系统 (15)3.2.1 伺服驱动器 (15)3.2.2 设备功能 (16)3.2.3 电机 (16)3.2.4 电机电缆 (21)3.3 安装条件 (21)3.3.1 安装条件与操作环境 (21)3.3.2 控制柜设计结构与散热 (24)3.4 机械项目规划 (25)3.4.1 驱动器 (25)3.5 电气项目规划 (31)3.5.1 连接图 (31)3.5.2 控制电压项目规划 (32)3.5.3 电源连接电源电压 (36)3.5.4 直流母线耦合 (60)3.6 验收测试及认证 (67)R912008283_版本03 Bosch Rexroth AG页数4供货、标签、运输及存放 (69)4.1 供货................................................................................... 694.1.1 出厂测试.............................................................................. 694.1.2 用户测试.............................................................................. 694.2 标签................................................................................... 704.2.1 铭牌.................................................................................. 704.2.2 包装清单.............................................................................. 714.3 组件运输............................................................................... 724.4组件存放 (72)5安装 (73)5.1 控制柜内安装ACS01...................................................................... 735.2 电气连接............................................................................... 745.2.1 连接图................................................................................ 745.2.2 连接点................................................................................ 755.2.3 板载连接点............................................................................ 765.2.4设计与安装过程中的电磁兼容措施 (96)6组件参数 (105)6.1 控制单元.............................................................................. 1056.1.1 EC-多类型编码器接口.................................................................. 1056.1.2 ET-多协议实时以太网网口.............................................................. 1296.1.3 数字量输入/输出...................................................................... 1356.1.4 电压型模拟量输入..................................................................... 1406.1.5 电流型模拟量输入..................................................................... 1416.1.6 模拟量输出........................................................................... 1416.1.7 继电器触点........................................................................... 1426.2 控制面板.............................................................................. 1436.2.1 设计................................................................................. 1436.3 电源.................................................................................. 1446.3.1 控制电压............................................................................. 1446.3.2 电源电压............................................................................. 1456.3.3 直流母线............................................................................. 1496.3.4 集成制动电阻......................................................................... 1516.3.5逆变器 (151)7电缆、配件及附加组件 (155)7.1 概述.................................................................................. 1557.1.1 电缆................................................................................. 1557.1.2 配件................................................................................. 1557.1.3 附加组件............................................................................. 1567.2 配件.................................................................................. 1577.2.1 安装及配件连接(HAS09).............................................................. 1577.2.2 直流母线连接器(RLS0778/K06)........................................................ 1637.2.3RKB0013,以太网通讯 (164)II 目录Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 III目录页数7.3 附加组件 (165)7.3.1 电源滤波器NFD / NFE (165)7.3.2 电源电抗器 (168)7.3.3 HLR外部制动电阻 (172)7.3.4 直流侧电容单元HLC (179)8 环境保护及废弃处置 (183)8.1 环境保护 (183)8.2 废弃处置 (183)9 服务与支持 (185)10 附录 (187)10.1 电缆横截面及保险丝尺寸选型 (187)10.2 测量泄露电容 (194)10.3 电容泄露 (195)10.3.1 电机电容泄露 (195)10.3.2 电力电缆电容泄露 (196)索引 (199)R912008283_版本03 Bosch Rexroth AGIV Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 1/201系统介绍1 系统介绍1.1 Rexroth IndraDrive Cs 系列1.1.1 概述–Rexroth IndraDrive Cs表格1-1:Rexroth IndraDrive Cs 系列组件R912008283_版本03 Bosch Rexroth AG1.1.2行业应用通用自动化、搬运、组装自动化组装及搬运系统码垛系统、取放系统、物流......机床小型机(例如木材加工)、辅机......食品及包装行业灌装及密封、码垛、装箱、封箱、贴标......印刷机械标签打印、贴标、数字印刷、定位......半导体行业半导体/晶圆生产、处理、金属化、清洗、太阳能电池生产......表格1-2:目标应用2/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.1.3 特性功能特性●结构紧凑●防护等级IP20●具有存储和控制功能的操作面板●多类型编码器接口支持多种主流编码器(ACUROlink、HIPERFACE®、EnDat2.1、EnDat2.2、SSI、TTL、 sin/cos 、旋转变压器、MS2N 编码器、MSC编码器 )●直流母线连接●1个模拟量输入 (14位, ±10 V)●8个数字量输入–2个探针输入–1个组合式数字量端口,可配置为数字量输入或输出●可调节的风扇控制●集成制动电流测量和监控●电机输出端绕组短路触发停机保护机制●支持MSC永磁同步伺服电机●霍尔传感器适配盒SHL03.1,用于操作带有数字霍尔传感器的MCL直线电机性能特征规格(宽:50 mm;高:215 mm)规格(宽:70 mm;高:268 mm)规格(宽:130 mm;高:268 mm)ACS1-W00...→0818283654主电源V 3 AC 200 … 500 V最大输出电流(4kHz)A rms818283654表格1-3:ACS01伺服驱动器规格参数Rexroth IndraDrive Cs ACS01伺服驱动器 3/201系统介绍R912008283_版本03 Bosch Rexroth AG接口概述●兼容IndraDrive 平台●支持以下协议的实时以太网通讯:–sercos III –EtherCAT(SoE)–EtherCAT(CoE)–PROFINET IO –EtherNet/IP●多类型编码器接口●模拟量输入●可自由配置的数字量输入/输出可用编码器可用编码器供电电压为5 V 和12 V 的编码器:●MSC 电机编码器●MSK 电机编码器●MS2N 电机编码器●ACUROlink 编码器●1V pp 正弦编码器,HIPERFACE®●1V pp 正弦编码器,EnDat 2.1、EnDat 2.2●1V pp 正弦编码器(配置参考信道)●省线式TTL 编码器●SSI●组合式编码器SSI(SSI 及1V pp 正弦编码器)●旋转变压器●SHL02.1霍尔传感器适配盒●数字霍尔传感器与SHL03.1霍尔传感器适配盒可配合使用4/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.2系统配置1.2.1系统结构*可选项24V 控制电压COM 通讯DST 自耦变压器F 保险丝ACS01伺服驱动器HLC 直流母线电容单元(用于连接直流母线的设备)HLR 外部制动电阻HNL 电源电抗器NF 电源滤波器K1外部电源接触器M 电机RB内部制动电阻(位于驱动器后方)插图1-1:Rexroth IndraDrive Cs 驱动系统系统介绍系统介绍1.2.2 驱动器组件ACS01 伺服驱动型号系统介绍表格1-4:ACS01型号说明HAP01 键盘图示插图1-2:HAP01 键盘型号表格1-5:HAP01型号说明系统介绍2安全使用说明2.1合理使用2.1.1使用须知Bosch Rexroth 产品代表着先进的开发和制造水平。
力士乐驱动器调试指南
力士乐驱动器调试指南1.检查电源和连接:首先,确保驱动器和电机正确连接到电源,并且电压和相位设置正确。
检查所有电缆和连接器是否牢固且没有损坏。
2.配置参数:在使用力士乐驱动器之前,必须正确配置一些参数,如电机参数、速度、加减速度等。
查阅力士乐驱动器的用户手册以了解如何正确配置这些参数。
3.检查报警和故障代码:如果驱动器出现了报警或故障代码,查阅用户手册以找到相应的解决方法。
常见的问题包括过载、过热、低电压等。
解决问题后,需要清除报警或故障代码。
4.调试电机运动:在驱动器配置完成后,可以尝试调试电机的运动。
首先尝试手动控制电机的转动,确保电机能够正常运转。
之后,可以尝试使用驱动器的自动运动功能,比如速度控制和位置控制。
如果发现电机在运动过程中出现异常,可以通过调整参数来进行修正。
5.观察电流和速度:通过观察电机的电流和速度可以判断电机的负载情况和运动是否正常。
如果电流过高或速度不稳定,可能是由于电机配置参数设置不当或驱动器故障引起的。
根据情况进行相应的调整或查找故障原因。
6.检查驱动器保护功能:力士乐驱动器通常配备了多种保护功能,如过载保护、过热保护等。
在调试过程中,可以尝试触发这些保护功能,确保它们正常工作。
如果保护功能无法正常工作,可能需要检查保护功能的配置或驱动器是否损坏。
总结起来,力士乐驱动器调试主要包括电源和连接检查、参数配置、报警和故障代码处理、电机运动调试等。
通过仔细检查和调整,您应该能够有效地解决大多数问题并使驱动器正常运转。
如果遇到无法解决的问题,及时寻求技术支持是解决问题的最佳途径。
希望以上调试指南能对您有效地使用力士乐驱动器有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力士乐REXROTH伺服参数设置文中简述了力世乐ECODRIVE03 伺服驱动系统通过并行接口进行位置块(组)操作模式(position block mode)的控制原理,并例举了与伺服驱动相关的故障及其解决方法。
数控机床控制中西门子、法那科伺服驱动系统应用较为普遍,而力世乐ECODRIVE03 伺服系统亦广泛地应用于机械制造、印刷造纸业、食品包装及集装总装等领域。
拥有FWA-ECODR3-SMT-02VS-MS 等系列硬件的ECODRIVE03 伺服系统通过串行、模拟、并行接口,及对系统标准参数(S 型参数)生产参数(P 型参数)的设置,可完成扭矩控制、速度控制、位置控制、插补控制、点动、位置块(组)及步进电机等模式的操作。
且系统带有测量、驱动、暂停、模拟输入/输出、数字输入/输出等多种基本功能并拥有完备的诊断功能。
下面介绍力世乐伺服系统的位置块(组)操作模式的控制原理。
1 位置块(组)操作模式的控制原理1.1 概述位置块(组)操作模式的控制原理位置块(组)操作模式是伺服系统以设定的速度、加速度等参数驱动电机运行到已在程序中预设的目标值的位置控制。
系统根据所处理的不同工艺过程(加工区域)最多可以设置64 个位置块(组)。
应用位置块(组)操作模式时,首先要对操作首要模式参数S-0-0032 进行设置,如设置为0000 0000 0011 х011 时,是通过编码器1 接口进行位置控制。
其中第3 位,bit3=0时代表位移滞后控制,bit3=1 时为无滞后控制;同时要将第二操作模式1 设置为点动模式,即设置参数S-0-0033 为1100 0000 0001 1011。
系统中与之相关的参数为:P-0-4006:加工块的目标位置值P-0-4007:加工块的速度值P-0-4008:加工块的加速度值P-0-4009:加工块的加加速度极值。
当设定为“0"时,极限值不起作用。
无论是绝对值还是相对值控制方式,P-0-4006、P-0-4007、P-0-4008、P-0-4009都有效,且每个参数都可最多设置为64 个数据,分别对应于0-63 数据块(组)的各个值。
P-0-4019:加工模式选择。
是完成各个加工过程中所应用的具体驱动控制方式。
驱动控制方式参数P-0-4019 的设定值绝对值方式1h剩余位置不被存储的相对值控制方式2h带有剩余位置存储的相对值控制方式102h正向控制方式4h负向控制方式8h在目标位置没有暂停的持续控制(方式1)1хh在目标位置没有暂停的持续控制(方式2)2хh在目标位置暂停的持续控制方式4хh由开关信号控制的持续控制方式8хh在绝对值控制方式中驱动必须回参考点。
带有剩余位置存储的相对值控制方式与相对值方式的区别是,当控制被中断时,由于剩余位置被记忆,在运行使能被加载后,可以继续完成控制而到达目标值,且控制链中的参考点可被保存。
正向、负向控制就是按照规定方向,在运行开始信号加载后,伺服轴运行至极限值设定的位置或极限开关的位置。
而不是运行至特定的目标位置值。
持续控制为根据目标值是否达到或开关信号来驱动伺服轴是否连续运行到下一加工过程所设置的目标值。
P-0-4026:加工块的选择,可通过此参数设置使伺服系统选择下一个加工过程P-0-4051:加工块的应答,为命令选择后应答信号 P-0-4052:位置块,被最终接受P-0-4057:位置块,被连接输入信息的块(持续控制的输入信息)P-0-4060:加工控制S-0-0346:命令设置标志位S-0-0182:诊断参数S-0-0259:位置速度当参数P-0-4060的bit1= “1"时,系统运行速度被参数S-0-0259的设定值限定,反之系统由参数P-0-4007 设定的速度值运行;当位置块(组)操作模式完成时,参数S-0-0182的bit12“位置到达"被设置,此时中断程序将撤除驱动使能,驱动功能暂停。
位置块(组)模式的操作,只有在被激活控制功能后,即当参数S-0-0346 的bit0 被触发时,运行才能被执行。
由于程序中有多个加工处理区域,所以要进行位置块(组)的选择。
可以通过设置参数P-0-4026或通过控制伺服驱动控制器DKC 的并行接口通讯来完成。
系统通过信号状态位参数S-0-144、信号控制参数S-0-0145 的各10 位数字输入、输出的变化,得知处于控制状态及如何驱动。
其中参数S-0-0145 的第0-5 位对应参数P-0-4026 的第0-5 位代表选择位置块(组),第6 位对应参数S-0-0346 第“0"位,第7 位对应参数S-0-0148,表示返回参考点命令,第8、9 位对应点动控制输入参数P-0-4056 的第0、1 位,系统可进行点动控制;参数s-0-144 的第0-5 位对应位置块(组)应答参数P-0-4051 的第0-5 位,代表POSQ0-Q5,第6 位对应参数S-0-0182 的第12 位,表示终点位置到达,第7 位对应参数S-0-0182 的第1 位代表运行停止(静止),第8 位对应参数S-0-0403 的第0 位代表参考点已到达,第9 位对应参数P-0-0135 的第0 位代表位置极限值。
1.2 机床控制中位置块(组)操作模式的应用我公司的凸轮轴修中心孔机床就是通过OMRON C200H PLC 的输入/输出与伺服驱动DKC01.3-040-7-FW 的并行接口的通讯,应用位置块(组)模式中的持续控制方试(FOLLOWING BLOCK),驱动伺服轴完成钻孔、攻丝、修中心孔加工过程行进距离的控制的。
机床将3 个加工过程设置为8 个数据块如下图所示。
并通过控制伺服驱动控制器DKC 的并行接口X15 的各数字位来进行硬件设置以完成数据块的选择。
1)快进图1 PLC的输入/输出与力世乐ECODRIVE03伺服驱动器的并行接口的连接通讯图对于各加工数据块的驱动控制方式采用持续控制方式。
设置参数P-0-4019=11h,过程如图2 所示.1.3 点动操作模式的控制原理应用位置块(组)操作模式时,第二操作模式1 要被设置为点动模式,即S-0-0033=11000000 0001 1011(JOG 手动方式)。
在机床通过并行接口控制时,当硬件连接后,驱动器根据硬件输入,自动设为JOG 方式。
与点动操作模式相关的参数为:P-0-4030:点动速度P-0-4056:点动输入信息S-0-0260:加速度S-0-0193:加加速度极限值S-0-0403:位置反馈状态S-0-0055:位置极化{$PAGE}图2 持续控制方式S-0-0049:正向极限值S-0-0050:负向极限值根据参数P-0-4056 所对应的不同硬件输入信息,系统进行相应操作参数P-0-4056 输入信息操作内容H1 显示00 JOG+=0 JOG-=0 没有任何操作AF01 JOG+=1 JOG-=0 正向点动JF10b JOG+=0 JOG-=1 负向点动Jb11b JOG+=1 JOG-=1 暂停AF2 与伺服驱动相关的故障实例2.1 伺服驱动控制器故障伺服驱动由伺服驱动控制器DKC 及程序模块组成。
伺服驱动控制器部分也是通过逆变、整流等过程,实现对伺服轴的控制。
机床曾出现过伺服驱动控制器的逆变硅桥损坏的故障。
故障是由于冷却风扇将潮湿物质带入逆变单元的硅桥中,造成短路引起的。
因为冷却风扇位于驱动器逆变单元硅桥的后方,虽然有防护网防止灰尘进入伺服驱动电路,但若电器柜密闭不严,若现场环境恶劣,则风扇处极易堆积灰尘,而夏季空气潮湿,随着风扇的转动,潮湿物质被带入逆变单元的硅桥后会造成短路故障。
因此注意系统保养,定期清洗系统板,清除系统冷却风扇扇叶上的附着物,保持电器柜内的空气干燥,对于降低伺服系统故障,具有重要意义。
2.2 上电后,程序模块没有任何显示ECODRIVE03伺服驱动系统中包括伺服驱动控制器DKC及FWA-ECODR3-SMT-02VS-MS程序模块两部分组成。
而FWA-ECODR3-SMT-02VS-MS 程序模块又包括参数模块、硬件模块两部分,如下图所示。
由于带有完备的自诊断功能,上电后在H1 处显示-0、-1、-4,使系统自动进行硬件检查。
然后显示C2-bb-AF,即命令激活--操作准备—驱动使能(进入预设的操作模式)。
但机床上电后,H1处没有任何显示。
为此需判断是程序模块的故障还是DKC 的问题。
因机床的左、右两主轴控制方式一致,只是参范围不一样,所以将FWA-ECODR3-SMT-02VS-MS 硬件进行了互换。
互换后,显示F276(绝对值编码器的值溢出)这说明驱动控制器DKC 是好的,所以更换FWA-ECODR3-SMT-02VS-MS 模块。
安装模块后,H1处首先显示UL,这时需要进行参数传输。
进行参数传输时需要准备:计算机传输线缆力世乐伺服驱动程序机床伺服参数备份盘按下图做好传输线缆,以便在计算机及伺服驱动器连接后,进行参数传输。
用传输线缆将计算机的9 针COM1 接口与DKC 的RS232 接口连接后,首先双击驱动程序Drive Top 13V02 图标,在计算机屏幕上显示c on line using RS232/485(Drive)c online using SERCANSc offline SIMULATIONc No CONNECTION选择on line using RS232/485(Drive)后,屏幕出现操作窗口,显示File Parameter Setup Overview Extras Options Help 菜单;然后选择Options 菜单,下拉菜单选择connection 项,进行通讯接口及传输波特率的设定。
选择COM=1 Baud=9600 ;然后选择Extras 菜单,下拉后选择Parameter mode 项;然后选择File 菜单,下拉后选择Load,单击“Change"钮,改变驱动盘,若备份数据在A 盘,则选择驱动器A 及所需文件,单击“Load"钮后,参数被自动装入。
2.3 数据传输后,仍然显示ULUL 表示数据不匹配。
由于与MKD、MHD、MKE型伺服电机相关的电机参数被存储在反馈数据区,上电后驱动器将根据存储的电机参数与所连接的电机进行自动比较,如果不一样,需重新从反馈存储区装入参数。
此时按下模块的S1 键,基本装入命令被执行。
进行在线检测时,在Parameter 菜单下可以看到Controller Type (控制版本号)及电机型号。
继续检查参数时发现JOG 参数S-0-0033 设置错误,修正后,故障消除。
机床出现故障后,传输正确参数很重要,所以应在机床正常工作时,作好备份工作。