延时时间测量
复现微波延迟时间间隔的一种方法
复现微波延迟时间间隔的一种方法己口口9年l1月第己日卷第现微波延迟时间间隔的一种方法李涛张华锋(中国人民解放军92957部队舟山316000)摘要:针对微波信号的延迟时间难以测量的难题,介绍一种能对微波延迟装置进行延迟时问测量的方法.设计了环路振荡电路,用脉冲信号在调制器上对微波信号进行反馈控制,将对微波延迟时间问隔的测量变换为对频率的测量,真实复现微波信号传输所经历的时间;采用PtC16F877A微处理控制器的脉冲捕捉功能,在PICC 平台上开发频率测量程序.实践证明:该方法能对宽范围的微波延迟时间间隔进行高准确度的测量.关键词:时间间隔;脉冲调制;微波延迟;频率测量中图分类号:TN7文献标识码:A MethodofmicrowavedelayintervalrecurrenceLiTaoZhangHuafeng(PLAUnitsNo.92957,Zhoushan316000,China)Abstract:InordertosolvetheproblemthatitisdifficultytOmeasuremicrowavedelayinterval ,amethodofmesuremi—crowavedelayintervalofmicrowavedelaysetisintroducedinthispaper.Thismethoddesigne dablockinggeneratorandcontrolledmicrowavesignalback-coupledwithpulsesignalonmodulatorthatchangedmicr owavedelayintervalmeasuretOfrequencymeasure,andrecurredthetransferstimeofmicrowavesignal,andusedpulse-cat chfunctionofPIC16F877A MCUtodesignfrequencymeasureprogrammeonPICCplatform.Thepricticeshowesthatthismethodcanmeasurewide—rangemicrowavedelayinterva1high-accurately.Keywords:PIC16F877A;pulsemodulation;microwavedelayinterval;frequencymeasure ment0引言在工程技术实践中,微波信号的延迟时间是重要的技术参数,对于雷达的调试,校准有着重要的意义.对微波信号延迟时间的测量具有工作频率高,微波信号弱,延迟时间短等特点.本文介绍一种能对微波延迟装置.进行延迟时间测量的方法,该方法真实地复现了微波信号在微波延迟装置中传播所经历的时间,对延迟时间间隔测量的最小值可以小于1n8,能对衰减量低于一8OdB的延迟装置进行测量.1工作原理1.1微波延迟时间测量原理设计该方案设计思路是将微波延迟时间测量转换成频率测量.测量电路采用微波电路结构,用延迟时间脉冲调制微波信号反馈振荡电路原理l_4],真实复现微波信号传输过程中所经历的时间.微波延迟时间测量电路原理框图如图1所示.微波延时时间测量电路设计3个输入端,C1是微波信号输入端,C2,C3是被测延迟装置输入端.初始状态时,微波放大器输入端无信号,脉冲放大整形器输出高电平,控制微波调制器开通,微波信号经过微波调制器送人被测微波延迟装置,经过延迟时间r,微波信号传送到微波放大器,受到衰减的微波信号经过放大,检波后送入脉冲放大整形器,脉冲放大整形器输出的1vrL电平变低,控制微波调制器关闭.由于微波调制器关闭,再经过延迟时间r,微波放大器输入端的微波信号消失,检波器无输出,脉冲放大整形器输出电平变为高电平,再次控制微波调制器作者简介:李涛,高级工程师,博士,主要从事军用计量管理与测试工作.一20一中国科技核心期刊200g年l1月第己日卷第1I期开通.整个电路往复循环工作,形成振荡状态,振荡周期简洁,工作过程真实地复现了为2r.振荡输出的信号经过分频器处理,由经历的时间,其振荡的周期正PIC16F877A微处理控制器进行频率测量.该电路结构微波延迟测量装置:图1微波延迟时间测量电路原理图1.2微波延迟测量数据处理模型在测量闭环回路中,硬件对微波的传输有不同程度的延迟,对测量的结果会产生影响,产生影响的主要部分有:微波调制器,微波放大器,检波器,脉冲放大整形器,内,外部连接电缆等.设硬件产生的延迟时间之和为∑,被测量延迟装置的延迟时间为r,测试回路中总延迟时间为t,则:r—t一∑t(1)设测量环路振荡频率为,,周期为T,则:T一(2)T一2t(3)由式(1)~(3)可得:一一∑一一厶(4)式中:是一个常数,因此,被测量延迟装置的微波延迟时间r仅与测量环路振荡频率-厂有关.2硬件设计2.1微波调制器脉冲调制器是振荡环路中的正反馈执行部件,在反馈脉冲的激励下,控制微波信号在脉冲调制器中的通断.根据微波放大器的输入灵敏度一70dBm和调制器最高能承受输入功率+30dBm的技术指标,按照环路工作原理要求,调制器的控制能力应不小于一100dBm.在该测量装置的设计中,采用一只控制能力为I10~120dB的高性能调制器,简化电路结构,减小内部延迟时间,同步性好,工作可靠.2.2微波放大器由于被测量延时装置对微波信号衰减较大,一般为一20~一7OdB,为了使检波器输出足够高的脉冲幅度,设计微波放大器对被测量延迟装置的输出微波信号进行高增益放大.微波放大器要求具有增益高,频带宽,输入动态范围大,噪声低,抗饱和,输出功率平稳等特点.在该测量装置中,微波放大器采用对数微波放大器,这种微波放大器通过对数转换功能,将大动态范围的输入信号压缩成较小的,易于处理的信号,微波信号输入动态范围可达+20~一68dB,微波放大器的输出激励检波器, 检波器的输出电压与放大器输入功率成正比.放大器在l~10GHz频率范围内,保持8OdB的增益,平坦度为±2dB,检波输出的对数斜率为5OmV/dB.采用混合集成技术和全温度范围补偿技术,使放大器在一50~+85℃全温度范围内保证技术指标,并且体积小,重量轻,可靠性高.2.3检波器检波器的作用是从经过脉冲调制的微波信号中将脉冲信号解调,提供给脉冲放大整形器.为了克服高增益放大器本底噪声的影响,同时较好地响应对数放大器的输出,检波器的灵敏度不宜过高,检波器必须保证对大动态范围输入有较好的响应,较小的输出失真,较好的脉冲前沿.2.4脉冲放大整形器脉冲放大整形器用于对高频低幅脉冲信号进行幅度放大和整形,由电压比较器,CMOS施密特门组成.采用门延时间仅为7.5ns的3016极速电压比较器,设计成具有输入信号回差的电压比较电路,将检波器输出信号与地电平进行比较后输出转换成为1vrL电平,再经由CMOS 施密特门进行整形.电压比较器电路原理如图2所示. 2.5分频器为了使PIC16F877A微处理控制器更稳定地测频,设计了分频器对环路振荡信号进行分频,使最高频率不超过PIC16F877A微处理控制器脉冲捕捉的频率范围.分频器由4518芯片构成,4518芯片是双分频器,两个分频器均接成十分频电路,并串连应用,构成100倍分频,每10 倍分频设置输出端,分别送人PIC16F877A的RC1和RC2接口,使用PIC16F877A的脉冲捕捉功能对其进行测频,并且根据频率的不同,自动选择RC接口.分频器电路原理如图3所示.中国科技核心期刊豳I_硼一一Cl0I瓣i∞=D101RO.1uFDl03D105一√囊105上lOlQG—ND一3Ol6VCC+E厂PARm{2IN+QRR1∽H50Q3IN—Q7R1o8VCC—END06l0{nDlOlD106D102.●一lo3Rm—.;nTVZZ5OQ50fa0?lIC.们1图2电压比较器电路原理图图3分频器电路原理图3频率测量程序设计[_8]7在均匀的脉冲序列中,脉冲频率值等于单位时间内发生的脉冲次数.根据这个原理,可以采用PIC16F877A内置定时器模块TMR1计时,同时使用CCP模块的捕捉功能,每间隔(:1,4,16)个脉冲捕捉一次并产生中断,用被捕捉的脉冲次数除以第1次和第(一1)×+1次脉冲之间间隔的时间即可得到脉冲频率值.程序流程图如图4所示.频率测量程序如下:unsignedlongmeasure(unsignedcharcatch){time_count=0;//定时计数器清零ccp_count=0;//脉冲计数器清零GIE=1;//允许全局中断PEIE=1;//允许外围中断TRISC1一O;//CCP2(RC1)输入CCP2IE=1;//允许CCP2中断CCP2IF=0;//ccP2中断标志位清0 CCP2CON—catchmode;//设置捕捉脉冲ei();//中断开始while(1)//等待定时中断if(ccp_count=一2)一22一break;di();//中断结束TMR1ON=0;//关闭TMR1CCP2CON=OxO0;//关闭CCP2CCP2IE=0;//关闭CCP2中断CCP2IF=0;//CCP2中断标志位清0 TRISC1—0;//CCP2(RC1)输出TMRlIE一0;//关闭TMR1中断TMRIlF=O;//TMR1中断标志位清0 PEIE—O;//关闭外围中断GIE=0;//关闭全局中断<开始>中断开始l系统初始化ll显示部分程序l}<>变量参数设置:\/1定时器中断计数变量Ytime—count=0;r2.脉冲捕捉中断计数交中断结束量ccpcount=O.计算频率值:允许全局中断f=nlAt,△辟于定时器中断计数变量timecount~以允~ccp2断:定时器寄存器最大值,1中断标志位清零:再加上定时器寄存器值2.设置脉冲捕捉模式为每一次脉冲捕捉.(结束)图4频率测量流程图中断程序流程图如图5所示.中断子程序如下:voidinterruptTMR1_(℃P2一ira(void) {中国科技核心期刊己口口g年l1月第己日卷第1l期图5中断子程序流程图if(TMR1IF一一1)//~tJ断是否定时器中断{TMR1IF=0;//TMR1中断标志位清0TMR1oN一0;//关闭TMR1TMR1L=0x00;//设置TMR1初始值TMR1H=0x00:TMRION一1;//开启TMR1time_count++;//定时计数器减1}if(CCP2IF一=1)//判断是否CCP2中断{if(ccp_count=一O){TMRIlE=1;//允许TMR1中断TMRIIF=0;//TMR1中断标志清0T1C0N=0x30;//设置分频TMR1L一0x00;//TMR1清零TMR1H=0x00;TMR1ON=1;//开启TMR1中断}CCP2IF=0;//CCP2中断标志清0ccp_count++;//脉冲计数器加1})4误差分析本文介绍的复现延迟时间的方法主要在下列主要方面产生复现误差.环路振荡器振荡频率的稳定度引入误差.由于该方法使包括被测件和测量部分共同构成一个振荡环路,在整个回路中的所有相关的器件,部件技术指标都对振荡特性产生影响.如传输过程中的驻波,器件,电路对输入的响应等都对频率的稳定度产生明显的影响.由于复现延迟时间维持的时间短,一般频率的短期稳定度对复现延迟时间影响较明显.10一~1×1O一为±(O.1~1)相对误差可以小于±0.01.测量电路,微波器件,检波器,脉冲处理器件对大动态范围输入的响应不一致,非线性作用,不灵敏区域,频率特性的不均匀等不理想因素,使复现的参数不一致性增加. 这种因素引入的误差在±(0.1~1)之间,且难以克服.随机因素引入误差.在实验过程中,环境温度,相对湿度,系统噪声等,对复现的参数产生随机影响,这种影响产生的误差在±(O.O1~O.1)之间,且随机产生.测频方法引入误差.由于该技术方案是将被复现的参数变换成频率,所以测频误差影响复现的结果.本方案采用了计算一定数量的脉冲所经历时间的方法,该方法的测量误差仅为时基误差,在本方案中,CPU的时钟频率比对外频标,误差一般不大于±10~.综合上述误差来源分析,振荡频率的稳定度对复现的结果影响较大,在工程实现过程中,微波器件的品种,电子线路的参数是减小复现误差的瓶颈.5结束语本文介绍的复现微波延迟时间间隔的方法利用频率测量准确的特点,设计了环路振荡电路,将难以测量的较短延迟时间变换成容易测量的较低的频率信号,该频率信号正比于延迟时间,线性度好,测量准确,方法简捷,实用性强;利用PIC16F877A微处理器的脉冲捕捉功能,设计的频率测量程序原理简单,性能可靠,分辨率高.参考文献[1]胡文华,王志云,代建鹏.雷达回波模拟器设计与应用[J].仪器仪表,2003,24(增刊2):113-114.[2]周小平,王宗富,陈运祥,等.倍频程宽带声体波微波延迟线[J].压电与声光,2004(5):345—347.[3]马晋毅,江洪敏,汤劲松.高性能C波段声体波微波延迟线[J].压电与声光,2008(3):255—257.[4-I龙沪强,陈昌发,蔡潮盛.采用注入锁定振荡器的频率相位追踪锁定环路的设计[J].仪器仪表,1999,20(1):68—70.[5]张华锋,李涛,林涛.基于PIC的某型雷达微波信号发生器的设计与实现[J].航空电子技术,2008联合学术研讨会:61—65.[6]李涛,张华锋.用PIC16F87X单片机实现高分辨率频率计的一种方法[J].现代科学仪器,2006(6):54—56. [7]杨波,张兴敢.基于PIC单片机的被动式红外报警系统的设计[J].电子测量技术,2008,31(1):53—55.I-8]刘和平.PIC16F87X单片机实用软件与接口技术[M].北京:北京航空航天大学出版社,2002.中国科技核心期刊一23~。
ct扫描延迟时间原理
ct扫描延迟时间原理
CT扫描延迟时间是指在注射造影剂后,开始进行CT扫描之前的时间间隔。
延迟时间的选择对于CT影像的质量和诊断的准确性具有重要影响。
延迟时间的选择原理主要包括以下几个方面:
1. 血管通路和循环时间,延迟时间的选择需要考虑造影剂从注射处到目标血管的通路和循环时间。
通常情况下,对于不同的部位和病变,需要根据其血管通路和循环时间来确定延迟时间,以确保造影剂在目标血管内达到最佳的浓缩度和对比度。
2. 强化程度和扫描时相,不同的组织和病变在注射造影剂后的强化程度和时间相位有所不同。
因此,延迟时间的选择需要考虑到目标组织或病变的理想强化程度和最佳扫描时相,以便在延迟时间内获得最佳的影像对比度和诊断信息。
3. 病变类型和临床需求,不同类型的病变对造影剂的吸收和强化速度不同,因此需要根据具体病变类型和临床需求来确定延迟时间。
例如,肿瘤、感染和血管病变等需要不同的延迟时间来获得最佳的影像信息。
4. 个体差异和临床经验,患者的个体差异和临床医生的经验也会影响延迟时间的选择。
有些患者可能因为生理差异或病理情况而需要特殊的延迟时间,而临床医生通过长期的实践经验也能更准确地确定延迟时间。
综上所述,CT扫描延迟时间的选择原理涉及到血管通路和循环时间、强化程度和扫描时相、病变类型和临床需求以及个体差异和临床经验等多个方面的考虑。
在实际应用中,需要综合考虑这些因素,根据具体情况来确定最佳的延迟时间,以获得高质量的CT影像和准确的临床诊断信息。
交换机延时可测技术的应用

交换机延时可测技术的应用发布时间:2021-10-11T05:23:19.721Z 来源:《科学与技术》2021年第29卷第15期作者:张淳[导读] 在国家“双碳”战略性减碳目标为牵引的能源革命大背景下,我国能源系统正在发生重大变化,越来越多的风电、太阳能、储能、“车网互动”在配电端接入电网,张淳北京航天爱锐科技有限责任公司北京市 100076摘要:在国家“双碳”战略性减碳目标为牵引的能源革命大背景下,我国能源系统正在发生重大变化,越来越多的风电、太阳能、储能、“车网互动”在配电端接入电网,以及电热气网互联互通,配电网正逐渐成为电力系统的核心,为连接能源生产、转换、消费的关键环节。
可以说,未来以电力为核心的区域能源互联网所有要素,包括智能楼宇、智能园区、智慧工厂、智慧城市等都和配电网密切相关。
关键词:交换机;延时;可测技术这些变化使得配电网正从不可控的传统配电网向部分可控的现代配电网和全面可控的未来配电网转变。
基于电流差动保护原理的配电网故障定位和切除方案,拥有适应存量配网设备和增量配网基建的优势。
但电流差动保护,需要依赖于可靠的采样同步技术,目前主要有依靠GPS/北斗的对时同步方案。
但在配电网地理广、设备多的现实中,难以覆盖配电网所有终端装置,当出现某一终端装置时间不同步且无法有效检测出来时,容易造成保护算法的错误造成误动或拒动。
因此依靠时钟同步的方案难以推广。
近年来,在数字化变电站出现了一种基于交换机延时可测技术的智能变电站采样同步方案,较好地解决了依赖外部时钟对时的问题。
本文主要针对电流差动同步需求,提出将交换机延时可测技术应用在配电网差动保护的适配方案。
1 配电网电流差动保护采样同步要求IEC 61850-5通信部分定义了信息传输的性能要求。
从表1中可知,配电网保护控制业务的SV和GOOSE报文的网络最大延时应为10 ms。
根据不同智能配用电业务对通信的需求不同,依据《电力系统通信设计技术规定》和IEC61850相关标准可以归纳出不同智能配用电业务的通信服务质量(QoS)指标[11],实时性评价指标用延时表示,参考Q/CSG 110017.67.5-2012《南方电网一体化电网运行智能系统技术规范第6-7.5部分:厂站应用厂站装置功能及接口规范(合并单元)》网络抖动的时间[12]。
延时与波长计算
延时与波长计算延时和波长是物理学中常用的两个概念,它们在许多领域中都有重要的应用。
本文将从人类视角出发,以自然的方式介绍延时与波长的计算方法。
延时是指信号传播所需的时间。
在无线通信中,延时的计算对于确定信号的传输速度以及数据传输的稳定性都是至关重要的。
延时的计算可以通过测量信号从发送端到接收端所需的时间来完成。
首先,我们需要记录发送信号的时间戳,然后在接收端记录信号到达的时间戳,两个时间戳的差值即为延时。
例如,假设我们发送一个无线信号,记录发送时间为T1,接收时间为T2,那么延时可以用以下公式计算:延时 = T2 - T1波长是指一定时间内波动的周期数。
在物理学中,波长通常用于描述波的性质。
波长的计算可以通过测量波的起点和终点之间的距离来完成。
首先,我们需要确定波的起点和终点,然后使用测量工具(如尺子或仪器)测量起点和终点之间的距离。
最后,我们将这个距离除以波动的周期数,即可得到波长。
例如,假设我们观察到一条波浪,波的起点为A,终点为B,波动的周期数为n,那么波长可以用以下公式计算:波长 = AB / n延时和波长的计算都是基于实际观测和测量的结果,因此在计算过程中需要准确地测量和记录数据。
此外,还需要注意单位的一致性,延时的单位通常是秒(s),而波长的单位通常是米(m)。
延时和波长的计算在无线通信、物理学等领域中具有重要的应用。
通过准确计算延时和波长,我们可以更好地理解信号传播和波动现象,并为相关技术和研究提供参考。
总结起来,延时和波长是物理学中常用的概念,它们的计算方法基于实际观测和测量。
延时的计算通过记录信号的发送和接收时间戳来完成,而波长的计算则通过测量波的起点和终点之间的距离来完成。
这些计算对于无线通信、物理学等领域都具有重要的意义。
通过准确计算延时和波长,我们可以更好地理解信号传播和波动现象,并为相关技术和研究提供参考。
rc延迟时间计算公式

rc延迟时间计算公式RC延迟时间是电子工程中一个重要的概念。
它指的是从瞬态响应的开始到信号的95%的峰值的时间,主要用于比较、测量、调节和控制不同样式的电子元件,可以精确地描述电子元件的性能。
RC延迟时间可用于计算多种电子元件,如电位器、滤波器、放大器、变压器和阻容网络。
RC延迟时间的计算公式主要有多种,但最常用的是RC时延公式。
它表示的是介质对于电子元件内置的电流释放的总延迟,用R和C表示。
R表示电阻,C表示电容,t表示时间。
该公式定义如下:t = RC log2 (1 + R/R)其中,R是被测电路中电阻的大小,R是被测电路中电容的大小,t表示时间。
RC延迟时间计算公式可以帮助电子工程师对系统性能进行评估和调整。
通过计算,可以精确地掌握被测电路的每个元件的延迟时间。
与电子器件的延迟时间有关的电子器件有放大器、滤波器、变压器、电位器等。
从电子器件的性能来看,它们的延迟时间是一个重要的指标,可以通过RC延迟时间计算公式进行计算。
RC延迟时间计算公式不仅可用于计算电子元件。
还可以应用于其他领域,如信号传输、智能系统、通信网络和信号处理等,由此可以更全面的了解系统的性能。
在某些情况下,RC延迟时间可以被视为一种硬资源,如何有效地计算它也变得非常重要。
为此,一些延迟时间模型和计算方法,如模型匹配、矩阵最小二乘等,被广泛应用到系统性能模拟中。
考虑到电子元件的性能,采用多方法计算RC延迟时间,将有助于改善系统性能。
RC延迟时间计算公式可以用于多种情况,如计算电子元件的性能、优化信号传输、分析模拟信号和测试系统性能等,具有广泛的应用前景。
然而,RC延迟时间计算公式也有一些局限性,比如,在较低频率时,它的精度不够,需要试验验证其实际的延迟时间。
总之,RC延迟时间计算公式是一种很有用的工具,它可以估计多种电子元件的延迟时间,并应用于电子元件的优化、信号处理和系统优化等。
未来,RC延迟时间计算公式将持续发挥作用,大大提高电子器件的性能,为电子工程师创造更多机会。
1588V2
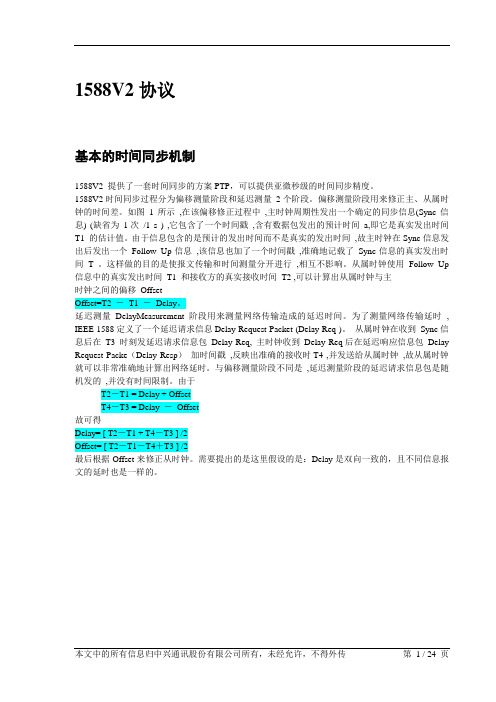
1588V2协议基本的时间同步机制1588V2 提供了一套时间同步的方案PTP,可以提供亚微秒级的时间同步精度。
1588V2时间同步过程分为偏移测量阶段和延迟测量2个阶段。
偏移测量阶段用来修正主、从属时钟的时间差。
如图1所示,在该偏移修正过程中,主时钟周期性发出一个确定的同步信息(Sync信息) (缺省为1次/1 s ) ,它包含了一个时间戳,含有数据包发出的预计时间a,即它是真实发出时间T1 的估计值。
由于信息包含的是预计的发出时间而不是真实的发出时间,故主时钟在Sync信息发出后发出一个Follow Up信息,该信息也加了一个时间戳,准确地记载了Sync信息的真实发出时间T 。
这样做的目的是使报文传输和时间测量分开进行,相互不影响。
从属时钟使用Follow Up 信息中的真实发出时间T1 和接收方的真实接收时间T2 ,可以计算出从属时钟与主时钟之间的偏移OffsetOffset=T2 -T1 -Delay。
延迟测量DelayMeasurement 阶段用来测量网络传输造成的延迟时间。
为了测量网络传输延时, IEEE 1588定义了一个延迟请求信息Delay Request Packet (Delay Req )。
从属时钟在收到Sync信息后在T3 时刻发延迟请求信息包Delay Req, 主时钟收到Delay Req后在延迟响应信息包Delay Request Packe(Delay Resp)加时间戳,反映出准确的接收时T4 ,并发送给从属时钟,故从属时钟就可以非常准确地计算出网络延时。
与偏移测量阶段不同是,延迟测量阶段的延迟请求信息包是随机发的,并没有时间限制。
由于T2-T1 = Delay + OffsetT4-T3 = Delay -Offset故可得Delay= [ T2-T1 + T4-T3 ] /2Offset= [ T2-T1-T4+T3 ] /2最后根据Offset来修正从时钟。
声表面波色散延时线激励的高精度时间间隔测量方法

宇航 计 测技 术
Ju n l fAsrn ui t lg n a ue n o ra t a t Mer o ya d Me s rme t o o c o
பைடு நூலகம்
Fe b., 01 2 2 Vo . 2. . 1 3 No 1
第3 2卷 第 1 期
文章 编 号 : 0 — 2 2 2 1 )0 — 0 2 0 1 0 7 0 (0 2 1 0 2 — 4 0
关键 词 时间间隔测量 时间内插器 S WD L 互相关 A D
Ti e I tr a e s e e tba e n S ra e Ac u tc W a e m n e v lM a ur m n s d o u f c o si v
Dipe sv l y Li e Ex ia i n s r i e De a n ct to
2 rdaeU i r t o eC ieeA ae yo c ne , e ig10 3 ; .G aut n esy fh h s cdm f i cs B in 0 0 9 v i t n Se j
3. Unvest fS ng a o c e e a c n l g i r i o ha h ifr S inc nd Te h o o y,S ng a 0 93; y ha h i2 00
4 hns epe ieao r o 6 0 1 B in 0 0 4 .C ieeP ol sLbrtnAmyn . 18 , e ig109 ) i j
Ab t a t Hih. r c so i ntr a a u e n e h i u s p a in f a tr l n t e e o o sr c g p e iin t me i e v lme s r me ttc n q e l y a sg i c n o e i h c n ‘ i
示波器的时序分析和延时测量方法

示波器的时序分析和延时测量方法示波器是电子测试仪器中常见且常用的一种,用于观察和分析电信号的波形。
除了可以测量电压、频率等基本参数外,示波器还具备时序分析和延时测量的功能,可以帮助工程师深入分析信号的时间特性和延时现象。
本文将介绍示波器的时序分析和延时测量方法。
一、时序分析时序分析是通过示波器观察和分析信号的时序关系,包括信号的上升时间、下降时间、脉宽等参数。
时序分析对于判断信号的稳定性、时序性等有着重要作用。
1. 建立测量通道:首先,在示波器上建立测量通道,选择合适的探头,并连接待测信号源和示波器。
2. 设置触发条件:根据待测信号的波形特点,设置触发条件,确保示波器可以成功触发并捕捉到关键的时刻。
3. 调整水平和时间尺度:根据观察需求,调整示波器的水平和时间尺度,以确保所测量的波形能够清晰显示并适合进行时序分析。
4. 选择测量参数:根据需要测量的时序参数,选择相应的测量工具或功能。
常见的时序测量参数有上升时间、下降时间、脉宽等。
5. 进行测量:根据示波器上的测量功能或工具,对待测信号进行测量。
示波器会自动计算并显示出所选参数的数值。
二、延时测量延时测量是指测量信号在不同路径间传播所需的时间差。
在电路设计、通信系统等领域中,延时测量是一项重要的工作,可以帮助工程师了解信号在不同部件间传播的延时情况。
1. 设置参考信号:首先,确定一个参考信号,在示波器上建立一个稳定的、重复的信号作为参考。
2. 设置触发条件:根据所需测量的延时路径,设置示波器的触发条件。
例如,如果需要测量延时路径为两个电缆的传播时间差,可以设置示波器在接收到参考信号后触发。
3. 连接待测信号源:连接待测信号源至示波器,并调整触发级别,使待测信号能够成功触发示波器并捕捉到关键时刻。
4. 计算延时:示波器会自动计算并显示出参考信号和待测信号的延时时间差。
通过对示波器的设置和测量结果的分析,可以得到所需的延时测量信息。
总结示波器的时序分析和延时测量方法是工程师在进行信号分析和电路设计时常用的手段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代会议室的音响系统为室内所有人员提供最佳的语言清晰度。
通常,我们需要建立主扬声器和辅助扬声器。
也许,有人有过这样的经验:演讲者在在前面演讲,但是我们听到的声音却是从旁边的扬声器中传来的,因此视觉和听觉的感受是不匹配的。
但是实现这种正面的定向声音是相当棘手的。
XL2音频与声学分析仪提供了有益的解决方案,可以很容易的的实现这种实际应用功能。
本应用指南描述了一些实际范例。
延迟时间量测 XL2 优化增强声音效果基本条件传播速度或速度因子是一种描述电气或无线电波信号在介质中传播快慢的参量。
电气音频信号在缆线中以光速传播,速度大小为300000km/s。
音速是描述声波在空气中传播快慢的物理量,音速在不同介质中的速度是不同的,同种介质的属性不同音速也不一样的,尤其受温度影响尤为巨大。
在海平面上,温度为15 °C (59 °F) ,正常的大气条件下音速为340m/s.为什么会有延迟发生呢?举个例子:在一个很大的厅堂内,当一个电气信号在100米的缆线中传输时大约有0.003微秒的延迟而当它在空气中传输相同距离时延迟大约有290毫秒。
这个差值我们叫做“传输延迟”。
而在实际应用中我们一般将在缆线中的传输时间忽略不计。
增强声音的挑战在一个比较大的厅堂内,不能保证所有的位置上都有足够的信噪比让人耳的听觉系统接收到信息。
因为在低信噪比的情形下语言清晰度会衰减的很多,并且声音的能量会以两倍距离衰减 6dB 的速率减少,因此许多会议室、厅堂需要安装扩声系统。
但不幸得是,并不是说安置一些扬声器和缆线就可以轻易地解决这些问题的,为什么呢?因为增强扬声器更接近于听众的耳朵,所以听众所听到的大部分声音由它们提供。
因此,听众的直接感觉是演讲者在扬声器位置上。
自然声源和扬声器的发出的声音不一致,让听众觉得很不自然。
此外,由于自然前波的传播延迟,听众感觉到的扬声器的声音就像回响一样,这进一步增加了听众感觉的不愉快并降低了语言清晰度。
在这里,我们将哈斯效应(Haas)考虑进去,这将有助于我们明白并解决这些问题。
哈斯效应-导论哈斯效应是以心里声学掩蔽效应为基础的:1.人类听觉感官系统察觉声音来源是由最先传达到的声音来源为方向.2.延迟或反射的声源如果传到耳朵听到的时间比第一个听到的声音不迟于25-35毫秒的情况下,不会被察觉是新的声源.3.如果声音在延迟 > 35ms的情况下, 听者会察觉是一种混响.4.同时适用于如果延迟的声音比原先听到的声音大到10dBASPL !当声音的前波到达人耳时,两耳就像位置探测器一样可以分辨出声源的位置。
而我们要达到的目标:确保主扬声器的声音要比反射或延迟信号先一步到达所有听众的耳朵。
我们必须要调整辅助扬声器使它的信号迟于主扬声器的前波到达人耳。
因此我们需要调整辅助扬声器的延迟时间。
哈斯效应-心里声学基础我们假设,听众是在扬声器的直接声场中(扬声器的直接声音要显著地高于反射回响声),因此在实际应用中这样利用哈斯效应:1.从不同方向过来的两个声波,若它们到达时延迟时间小于35ms时我们可以将它们看做一个声音。
辅助扬声器延迟时间设置的时限:最小10ms,最大35ms。
只要这个标准符合人耳听到的声音是从前面扬声器传过来的,使得听觉感受和视觉感受一致。
2.即使辅助扬声器的声压级比原来声波声压级达到10dBASPL(上限值),上述延迟时间的设置也是合适的。
这种效应非常具有实用价值:每个扬声器就能传送更多的能量到每个座位上,因此所需的总的扬声器数目就可以得到减少。
一个比较好的实际应用是将辅助扬声器的声压级调整到比前波高6dB 。
因此,一个完整的延迟线阵列的设置需要测量延迟时间与声压级两个参量,这些我们将在下面的范例中一步一步解释清楚噪量测位置:从图1中我们可以很清楚地看出:SUP1 和 SUP2 的轴线在第3排有一个垂直交叉点。
3排1座(seat3.1)是最靠近辅助扬声器SUP2的位置。
现在我们来计算:1.Seat 3.1的所有相关参量2.测量最后一排声压级,seat 11.1图1:厅堂,范例1范例1环境设置:参考图1- 在厅堂前方安放了SUP1扬声器(模拟一个演讲者)。
SUP1声压级设置为66dBA SPL @ 1m.-在厅堂的左边,设置了一个辅助扬声器SUP2.简单起见,扬声器的辐射只考虑为90°。
辅助扬声器SUP2的延迟时间和声压级大小为多少呢?1.计算,Seat 3.1Seat 3.1到SUP1的距离为5.9m 。
而扬声器声压级以是两倍距离衰减6dB的速度减少的,因此-SUP1在seat 3.1 的声压级=66dB - 6*log(5.9m)/log2 = = 66dB - 15.4dB = 50.6dBA SPLseat 3.1 位置相对于SUP1的声学延迟计算:-相对于SUP1延迟时间=距离D/音速= 5.9m / 340m/s = 17ms Seat 3.1 距离SUP2 2.0m 。
- SUP2 在 seat 3.1处声压级 = 66dB - 6*log(2.0m)/log(2) = 66dB - 6dB = 60.0dBA SPL- 相对于SUP2延迟时间= 距离 D/ 音速 = 2.0m / 340m/s = 6ms结果:SUP1的声音在17ms后到达seat 3.1 ,比SUP2迟11ms。
因此,坐在seat 3.1位置上的人会感觉到声音是从左边过来的,但是却看到演讲者正在前方演讲。
左边扬声器SUP2的声压级比前边扬声器SUP1大9.4dB ,这使得座位上的人再一次加强了声音是从左边扬声器过来的事实。
seat 3.1位置声学效果的改善:将SUP2的延迟时间设置为11ms(= Delay SUP1 - SUP2) ,这样两个声源发出的声音将同时到达seat 3.1 。
为了确保听到的声音是从前面扬声器过来的,我们额外增加5ms 的差值,因此将SUP2的延迟时间设置为16ms.SUP2的声压级最大只能比SUP1大10dB,在这里我们可以使用SUP2的默认值=66dBA SPL @ 1m 就可以满足要求了。
所有位置声学效果的改善:在距离SUP2最近的位置上声压级大小的影响最大,而在距离SUP2位置最远的位置上延迟时间的设置是最敏感的。
为了最佳设置辅助扬声器SUP2,我们必须确保所有座位满足以下条件。
a) SUP2的声波必须晚于SUP1声波到达位置。
b) SUP2的声压级不能超过SUP1在相同位置上10dB。
上面的计算现在可以适用于所有位置,特别是一些关键性位置。
2. 计算, Seat 11.1, 距离 SUB2 8.3m- SUP2 在 seat 11.1位置上的 声压级 = 66dB - 6*log(8.3m)/ log(2) = 66dB - 18dB = 48.0dBA SPL- 距离 SUP1 的延迟= 距离 D/ 音速 = 13.4m / 340m/s = 40ms-距离 SUP2 的延迟 =距离D / 音速= =8.2m / 340m/s = 24ms 当SUP2的声波比SUP1的声波晚5ms到达位置时具有最好的方向识别。
因此SUP2的延迟时间=40ms-24ms+5ms=21ms所需仪器:在这个应用中,我们使用 XL2 音频与声学分析仪来代替计算器和和繁琐的运算。
XL2 甚至考虑到了声速会随着环境温度的变化二发生改变。
我们使用XL2 ,只需几秒钟就可以测量出上述结果。
我们可以从 NTi Audio 网站 /XL2 下载一个Excel 工作表。
这个Excel 工作表提供了一个抽象的厅堂空间图并计算出各个座位到主扬声器、辅助扬声器的距离,声压级大小及延迟时间。
它也适用于检查各个座位和传声器是否满足哈斯效应的条件。
万一某个座位不满足,则相应座位的颜色和状态会发生改变。
介绍到这,你也许会说:“我已经明白了,这很简单。
这种方法也可以应用到比较大的厅堂环境中吧”,但事实果真如此吗?范例2-更大的厅堂环境中的应用在一个300人厅堂环境中,我们设置了一个扩声系统并且使它最优化,其空间分布图如第7页图2所示。
演讲者在前方发言,使用两个扬声器SUP1,分别设置在左边和右边。
此外,在厅堂的每一边,我们分别在6m位置和14m位置各设置一个扬声器。
为了简单起见,我们不考虑后方墙壁的反射。
为了优化扩声系统,使之声学效果更佳,我们需要解决以下几个问题:a) 扬声器SUP1声压级多大比较合适?b) 我们是否需要设置SUP1的延迟?或者说是否要提供没有延迟的信号给它们?c) 扬声器SUP2和SUP3的声压级多大最合适?我们基本上有两种方法。
接下来我们将讨论比较这两种方法:A) 直观法B) 量测法A) 直观法a) 扬声器SUP1设置成没有延迟。
b) 辅助扬声器SUP2在第三排的延迟时间设置为6m/340m/s =18ms.c) 第十排后的线阵列扬声器SUP3的延迟时间设置为14/340m/s =41ms 。
d) 所有辅助扬声器的声压级不得高于主扬声器SUP1.结果:我们将在最后讨论这样设置的结果和影响。
图2:厅堂,范例2B)量测法首先,我们考虑下哪些座位受影响最大?-主要是那些最靠近扬声器的位置,和那些离演讲者最远的位置。
第一排和第二十排的最远位置是延迟时间最关键的位置,因为这些位置相对于演讲者来说是在边缘区域。
首先,我们选取seat 1.1 (第一排,座位一,(row1, seat 1, 距离演讲者9m)。
我们使用一个中心扬声器来模拟演讲者的发言。
步骤:1a. 激活中心扬声器模拟演讲者的发言。
1b. 使用延迟量测信号(chirp ),测试 CD 或者 Minirator 中都含有 chirp 信号。
1c.选择 XL2 的延迟量测功能 DELAY。
XL2 显示器上显示“SYNC to cable“ ,这是在说我们现在必须将 XL2 和测试信号进行同步。
同步信号将花费我们几秒钟的时间。
1d. 当同步条形图全部变黑时,同步完成。
这时我们就可以开始测量延迟时间了。
断开缆线,您就可以测量室内任何位置的延迟时间了。
SUP1扬声器的设置延迟设置:2a. 将 XL2 都处于 seat 1.1 () ,打开中心扬声器的量测信号,我们可以在 XL2 上得到:延迟时间为26.3ms ,延迟时间下方显示距离为8.9m.2b. 关闭中心扬声器,只运行SUP1。
seat 1.1 上测得的延迟时间为14.7ms 。
这说明了SUP1的声音比演讲者的声音早11.4ms 到达seat 1.1。
因此,SUP1的延迟时间至少要设置为12ms,我们建议您设置成17ms(包括5ms的差值,具体原因前文已经叙述过)使seat 1.1具有最好的声音指向性。
这样的延迟时间的设置将确保演讲者的声音先于SUP1到达听众。