分数阶离散控制系统的建模与离散控制器
《离散化控制系统》课件

离散化控制系统的性能分析
了解离散化控制系统的稳定性和性能指标分析对优化系统表现至关重要。还 将介绍实现系统最优性的方法。
离散化控制系统的应用实例
探索离散化控制系统在实际应用中的案例。我们将看到温度控制系统、电机控制系统和智能交通控制系统等多 种应用场景。
总结
通过本课程,您对离散化控制系统有了全面的了解。窥探离散化控制系统的未来发展和重要性,以及其在各行 各业的应用前景。
《离散化控制系统》PPT 课件
欢迎来到《离散化控制系统》PPT课件,通过本课程,您将深入了解离散化控 制系统的概念、应用和设计方法,以及控制器设计、性能分析和应用实例。 准备好开始学习吧!
概述Байду номын сангаас
什么是离散化控制系统?离散化控制系统是将连续时间系统转换为离散时间系统进行控制的方法。它在许多领 域都有广泛的应用,具有许多优势。
离散化控制系统的基础知识
在学习离散化控制系统之前,了解一些基础知识非常重要。这些知识包括采样定理、Z变换以及信号的时域和 频域表示。
离散化控制系统的设计方法
掌握离散化控制系统的设计方法是实现系统性能的关键。时域法设计、频域法设计以及非线性系统设计都是常 用的方法。
离散化控制系统的控制器设计
选择适合离散化控制系统的控制器是保证系统稳定和性能的重要因素。PID控制器设计、自适应控制器设计以 及鲁棒控制器设计都值得掌握。
控制系统的分数阶建模及分数阶PI^λD^μ控制器设计

其进 行 近似 处理 , 由于建模 误 差过 大影 响所描 述 系统 的准确 性 和 控 制性 能。本 文 给 出 了具 有 延迟
环 节 的新型 非整数 阶 类一 阶 系统模 型 ( n o n—i n t e g e r o r d e r p l u s t i me d e l a y , N I O P T D) , 并 分别 设 计 了 某 高阶 系统 降 阶得 到 的传 统模 型 与新型 类一 阶 系统 近似 模 型 , 对 比分 析 新 型 类一 阶 系统 模 型 的优
第l 8卷
第 3期
电 机 与 控 制 学 报
El e c t r i C Mac hi nes a nd Co nt r ol
Vo 1 .1 8 No . 3 Ma r .2 01 4
2 0 1 4年 3月
控 制 系统 的分 数 阶建 模 及 分 数 阶 P I A
Ab s t r a c t : F o r t h e d e l a y p e r f o r ma n c e o f t h e h i g h e r o r d e r d y n a mi c s y s t e m mo d e l i n t h e p r o c e s s o f s y s t e m a — n a l y s i s a n d d e s i g n,f i r s t o r s e c o n d o r d e r p l u s t i me d e l a y s y s t e m mo d e l a r e u s e d t o ma k e a p p r o x i ma t i o n s f o r i t ,b u t t h e d e s c i r b e d s y s t e m a c c u r a c y a n d c o n t r o l p e f r o m a r n c e a r e r e d u c e d b e c a u s e o f o v e r s i z e e r r o r o f
基于直接离散化方法的分数阶PIαDβ控制器设计
中 图分类 号" T P 3 0 1
文献标 识码 : A
文章 编号 : 1 0 0 7 - 9 4 1 6 ( 2 0 1 3 ) 0 9 0 0 0 3 ・ 0 2
以得到不同的离散化结果。 近年来国内外学者针对分数阶微积分算 子离散化进行 了各种研究 , 提出了很多的离散化方法。 例如 , 递 归式 P I D 控制器是最早 出现的控制器类型 , 在过程控制与运动控 制 展开法( Mu i r - r e c u r s i o n ) 和连分式展开法( C F E : C o n t i n o u s F r a c - 系统 中占有重要地位 。 由于P I D 控制器结构简单 、 各控制参数物理 i o n a l E x p a n s i o n ) 等等。 意义 明确 、 调整方便、 可靠性高和鲁棒性好等特点, 而在工业控制 中 t 本文在下面各节将分另 论基于直接离散化方法的分数阶P I “ D 倍受青 睐, 应用极为广泛 。 随着近几年分数阶微积分理论的不断发
现为分数阶控制理论开辟了的应用途径, 在控 制领域具有 里程碑的
意义。
2 . 1生成 =  ̄ t ( G e n e r a t i o n F u n c t i o n ) 在控制理论与控制工程 当中, 通常会用传递函数或者微分方程 来描述一个控制系统。 由于用解析方法来求解分数 阶微分方程相对
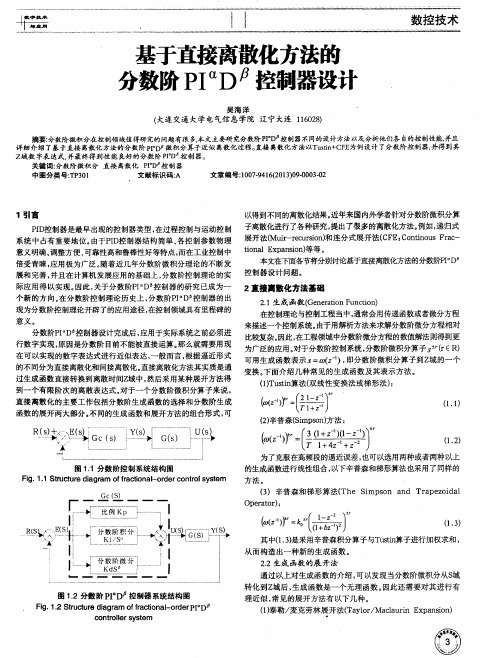
图1 . 2分数 阶 P I “ D 控制器 系统结构图
F i g . 1 . 2 St r u tu c r e d i a gr am o f f r a c t i o n a l — or d e r P I “ D
离散控制系统的模型控制设计
离散控制系统的模型控制设计随着科学技术的日趋发展,离散控制系统在工业生产和自动化领域中扮演着至关重要的角色。
离散控制系统的模型控制设计是其中一个关键方面,它涉及到系统建模、控制器设计以及性能评估等多个方面。
本文将详细介绍离散控制系统的模型控制设计,并探讨其在实际应用中的意义和挑战。
一、系统建模系统建模是离散控制系统模型控制设计的第一步,它的目的是将实际系统抽象为数学模型,以便进行后续的分析和设计。
在系统建模中,我们需要确定系统的输入、输出以及状态变量,并基于这些变量建立系统的数学方程。
常用的系统建模方法包括传递函数法、状态空间法和传统差分方程法等。
根据具体的实际应用场景和需求,选择适合的系统建模方法可以更好地描述和分析离散控制系统的行为。
二、控制器设计控制器设计是离散控制系统模型控制设计的核心环节,它的目标是设计合适的控制器,以实现系统的稳定性、鲁棒性和性能指标的优化。
在控制器设计中,我们可以采用传统的PID控制器、模糊控制器、模型预测控制器等不同的控制策略。
其中,PID控制器是应用最为广泛的一种控制策略,它通过比例、积分和微分三个部分对系统的误差进行调节。
模糊控制器则通过模糊推理和模糊规则来实现对系统的控制。
模型预测控制器则是基于系统的数学模型进行预测,并根据预测结果进行控制。
根据不同的应用需求,选择合适的控制策略和参数调节方法可以有效提高离散控制系统的性能。
三、性能评估离散控制系统的性能评估是模型控制设计中一个至关重要的环节,它的目的是通过对系统性能的评估,来确定控制方案的有效性和优劣。
性能评估指标可以包括稳定性、响应速度、超调量、抗扰动能力等多个方面。
常用的性能评估方法包括系统的阶跃响应、脉冲响应以及频率响应等。
通过比较实际系统的响应曲线与理论模型的要求,可以评估并优化离散控制系统的性能。
四、实际应用与挑战离散控制系统的模型控制设计在实际应用中有着广泛的应用和重要意义。
它被广泛应用于工业过程控制、机器人控制、航天飞行器控制等领域。
分数阶微分算子的离散化方法比较

分数阶微分算子的离散化方法比较
樊玉华;李文
【期刊名称】《大连交通大学学报》
【年(卷),期】2008(029)003
【摘要】对分数阶微分算子S'(r ∈ R)的离散化是分数阶控制系统数字化实现的关键所在,不同的离散化方法有其各自的优缺点和适用范围,通过实例仿真,对常用的几种离散化方法进行了详细的分析比较,对Al-Alaoui算子的连分式展开逼近法进行相角补偿,得到了有效的、首选的离散化方法.
【总页数】5页(P95-98,105)
【作者】樊玉华;李文
【作者单位】大连交通大学,电气信息学院,辽宁,大连,116028;大连交通大学,电气信息学院,辽宁,大连,116028
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于Delta算子离散化方法的连续T-S模型混沌化 [J], 赵琰;张化光
2.连续时间T-S模糊系统的离散化:Delta算子方法 [J], 杨德东;张化光
3.基于Tustin变换的分数阶微分算子近似离散化 [J], 宋保业;许琳;卢晓
4.二维Logistic分数阶微分方程的离散化过程 [J], 刘杉杉;高飞;李文琴
5.一类含有参数的分数阶微分方程边值问题的单调算子方法 [J], 邵宏宇;王文霞
因版权原因,仅展示原文概要,查看原文内容请购买。
离散控制系统中的系统建模与辨识

离散控制系统中的系统建模与辨识离散控制系统是指根据一系列离散时间点上的取样数据进行控制的系统。
在离散控制系统中,系统建模和辨识是非常重要的环节。
系统建模是指通过数学模型来描述系统的动态特性和行为规律,而系统辨识则是指通过实验或数据处理的方法来确定系统的模型参数。
本文将介绍离散控制系统中的系统建模与辨识方法和步骤。
一、系统建模在离散控制系统中,系统建模的目的是找到一个准确描述系统行为的数学模型。
常用的离散控制系统建模方法包括差分方程法、状态空间法和传递函数法等。
1. 差分方程法差分方程法是一种基于时域离散数据的系统建模方法。
通过将系统的输入与输出信号用差分方程表示,可以得到系统的离散时间域数学模型。
差分方程法主要分为两种形式:一阶差分方程和高阶差分方程。
一阶差分方程适用于单输入单输出系统,而高阶差分方程可以描述复杂的多输入多输出系统。
2. 状态空间法状态空间法是一种基于状态变量的系统建模方法。
通过将系统的状态与输入输出联系起来,可以得到系统的状态空间方程。
状态空间法可以描述线性时不变系统和非线性系统,具有较好的可观性和可控性。
3. 传递函数法传递函数法是一种基于频域离散数据的系统建模方法。
通过对系统的输入输出信号进行傅里叶变换,可以得到系统的传递函数。
传递函数是系统的频率响应函数,可以直观地描述系统的频率特性和动态响应。
二、系统辨识系统辨识是指通过实验或数据处理的方法来确定系统的模型参数。
在离散控制系统中,系统辨识可以分为基于时域数据和基于频域数据的方法。
1. 基于时域数据的系统辨识基于时域数据的系统辨识方法主要包括最小二乘法、模型识别法和递推算法等。
最小二乘法是一种常用的参数估计方法,通过最小化预测误差的平方和来确定系统的模型参数。
模型识别法则是通过将系统的输入输出数据与一组候选模型进行比较,选择最优模型来确定系统的模型参数。
递推算法是一种逐步逼近的方法,通过不断优化模型的参数来逼近系统的真实模型。
分数阶系统辨识与控制器设计研究的开题报告
分数阶系统辨识与控制器设计研究的开题报告1. 研究背景近年来,分数阶控制理论已逐渐成为控制领域的一大研究热点。
与传统整数阶控制相比,分数阶控制在对动态系统进行建模及控制时更加准确和灵活。
尤其在非线性、复杂系统的控制应用方面,分数阶控制具有显著的优势。
然而,分数阶系统的数学模型较为复杂,辨识和控制技术也相对困难,因此在实际应用中仍然存在很多挑战与难点。
2. 研究内容和目标本研究的重点是针对分数阶系统的模型辨识和控制技术进行深入研究,具体研究内容包括:(1)分析分数阶系统的数学模型及其特性,比较不同分数阶模型与整数阶模型之间的差异和联系。
(2)探究基于最小二乘法、最大似然估计法、基于时域和频域的方法等分数阶系统辨识技术,归纳分析各种方法的优缺点及其适用范围。
(3)研究基于辨识模型的分数阶控制技术,包括基于相对阶、经验模态分解和自适应方法等分数阶控制器设计。
(4)利用MATLAB等工具进行仿真实验,评估各种方法的辨识和控制性能。
本研究的目标是建立有效的分数阶系统辨识和控制技术,为实际工程系统的控制提供理论基础和技术支持。
3. 研究方法本研究采用文献综述、数学理论分析和计算机仿真实验相结合的方法,具体步骤如下:(1)通过文献调研和阅读相关学术论文,熟悉分数阶控制理论和方法。
(2)利用数学理论和方法对分数阶系统的模型进行建模和分析,研究分数阶系统的数学特性和参数辨识问题。
(3)根据辨识结果,设计适当的控制器并进行仿真实验,评估控制性能和控制器的适用性和稳定性。
4. 研究意义本研究的成果有望为分数阶控制在实际应用中提供理论依据和技术支持,具体意义如下:(1)拓展了分数阶控制的研究领域,对控制理论的发展具有一定推动作用。
(2)提出了一系列辨识和控制方法,为分数阶控制的实际应用提供技术支持和借鉴。
(3)为解决非线性、复杂动态系统控制问题提供了一种新的思路和解决途径。
分数阶MIMO控制系统状态空间建模分析
近年来 , 随着 计算 手段 的迅速 发展 , 分数 阶微 积分 的分析 方法 和数值 解法 才逐步 应用 于控 制领 域 , 分析 和综 合控制 系统 , 用来 使之 达 到更好 的控 制 性能 口 。实 际 系统 大 都是 非 整 数 阶控 制 系 统 , J 虽 然有些 系统 的 非整 数 阶次 比较低 , 在 系 统 分 但
系统 稳 定 分 析 的可 行 性 。
关键词 : 分数 阶微积分 ;控制系统 ; 状态空间 ;数学模 型 ; 控制器 中图分类号 : P 3 T 1 文献标识码 : A 文章编号 :0 35 6 ( 0 60 —6 50 10 —0 0 2 0 60 9 —4 J
M o e i g a a y i f s a e s a e f r f a to lo d r d ln n l s so t t p c o r c i na — r e
m u t_n tm u t_ u p tc n r ls s e s lii pu lio t u o t o y t m ・ ‘
Z HAO h— II Qi i Si WU。 N — n b
( p .o e to c gn eig,Ch z o nv r i De t fElc rnisEn ie rn u h uU iest y,Ch z u2 9 1 u ho 3 0 2,Chn ) ia
1 分 数 阶微 积 ຫໍສະໝຸດ 与控 制 系统 数 学模 型 1 1 分 数 阶微积 分 .
微 积分 的阶次 在实数 范 围 内变 化形成 分数 阶
微积分, 其操作数为 其中 以和 t D, 分别为上下 限。连续 的分数 阶微 分操 作数定 义 为
维普资讯
第2 9卷 第 6期
基于直接离散化方法的分数阶控制器设计
基于直接离散化方法的分数阶控制器设计作者:吴海洋来源:《数字技术与应用》2013年第09期摘要:分数阶微积分在控制领域值得研究的问题有很多,本文主要研究分数阶控制器不同的设计方法以及分析他们各自的控制性能,并且详细介绍了基于直接离散化方法的分数阶微积分算子近似离散化过程。
直接离散化方法以Tustin+CFE为例设计了分数阶控制器,并得到其Z域数字表达式,并最终得到性能良好的分数阶控制器。
关键词:分数阶微积分直接离散化控制器中图分类号:TP301 文献标识码:A 文章编号:1007-9416(2013)09-0003-021 引言PID控制器是最早出现的控制器类型,在过程控制与运动控制系统中占有重要地位。
由于PID控制器结构简单、各控制参数物理意义明确、调整方便、可靠性高和鲁棒性好等特点,而在工业控制中倍受青睐,应用极为广泛。
随着近几年分数阶微积分理论的不断发展和完善,并且在计算机发展应用的基础上,分数阶控制理论的实际应用得以实现。
因此,关于分数阶PIαDβ控制器的研究已成为一个新的方向。
在分数阶控制理论历史上,分数阶PIαDβ控制器的出现为分数阶控制理论开辟了的应用途径,在控制领域具有里程碑的意义。
分数阶PIαDβ控制器设计完成后,应用于实际系统之前必须进行数字实现,原因是分数阶目前不能被直接运算。
那么就需要用现在可以实现的数字表达式进行近似表达,一般而言,根据逼近形式的不同分为直接离散化和间接离散化。
直接离散化方法其实质是通过生成函数直接转换到离散时间Z域中,然后采用某种展开方法得到一个有限阶次的离散表达式。
对于一个分数阶微积分算子来说,直接离散化的主要工作包括分数阶生成函数的选择和分数阶生成函数的展开两大部分。
不同的生成函数和展开方法的组合形式,可以得到不同的离散化结果。
近年来国内外学者针对分数阶微积分算子离散化进行了各种研究,提出了很多的离散化方法。
例如,递归式展开法(Muir-recursion)和连分式展开法(CFE:Continous Fractional Expansion)等等。
分数阶PIλDμ控制器的设计方法——极点阶数搜索改进法
分数阶PIλDμ控制器的设计方法——极点阶数搜索改进法严慧
【期刊名称】《机械设计与制造工程》
【年(卷),期】2010(039)017
【摘要】基于分数阶被控系统提出了分数阶PIλDμ控制器,该控制器将传统整数阶PID控制器的微分与积分阶数扩展到分数,增加了2个参数μ和λ.相比整数阶PID 控制器,分数阶PIλDμ控制器的设计更加灵活,但设计过程较复杂.在极点阶数搜索法的基础上,提出了分数阶PIλDμ控制器设计的改进方法,其基本原理是,首先估计比例参数KP,其次搜索一对使系统时域性能较好的极点,然后根据时域指标搜索较好的μ,λ并计算出KI,KD,最终设计出合适的分数阶PIλDμ控制器.仿真结果证实,与极点阶数搜索法相比,它的改进法设计出的分数阶PIλDμ控制器能够更好地调节系统,系统响应能够达到更高的时域指标,并且具备很好的动、稳态性能.
【总页数】5页(P44-48)
【作者】严慧
【作者单位】金陵科技学院,信息技术学院,江苏,南京,211169
【正文语种】中文
【中图分类】TP273
【相关文献】
1.控制系统的分数阶建模及分数阶Piλ Dμ控制器设计 [J], 邓立为;宋申民;庞慧
2.一类采用分数阶PIλ控制器的分数阶系统可镇定性判定准则 [J], 高哲
3.分数阶PIλDμ控制器阶数变化对控制性能的影响 [J], 严慧
4.分数阶PIλDμ控制器的设计方法——极点阶数搜索改进法 [J], 严慧
5.分数阶PI^λD^μ控制器参数设计方法——极点阶数搜索法 [J], 严慧;于盛林;李远禄
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
频率和记忆长度使得系统满足一定的量化函数, 就能够得到足够精度的系统描述。 此外本文 还得出了分数阶 PI D 控制器和 TID 控制器的离散化形式,便于获得分数阶离散系统的各 项性能指标。最后文章对一个闭环系统作了举例说明。
λ µ
参考文献
[1] Dingyu Xue, YangQuan Chen,“A comparative introduction of four fractional order controllers”, Proceesing of the 4th World Congress, Intelligent Control and Automation’02, Vol.4, pp.3228-3235, 2002 [2] M. Axtell, E. M. Bise: Fractional Calculus Applications in Control Systems. in: Processing of the IEEE1990 Natural Aerospace and Electronics Conference, New York, 1990, pp. 563-566. [3] L’. Dorcak: Numerical Models for Simulation the Fractional-Order Control Systems UEF SAV, TheAcademy of Sciences, Institute of Experimental Physics., Kosice, Slovak Republic, 1994. [4] R. C. Dorf, R. H. Bishop: Modern control systems. Addison-Wesley company, New York, 1990. [5] Lubich: Discretized fractional calculus. SIAM J. Mathematics Annually. vol. 17, pp. 704-719. [6] I. Podlubny: Fractional Differential Equations. Academic Press, San Diego, 1999. [7] K. B. Oldham, J. Spanier: The Fractional Calculus. Academic Press, New York, 1974. [8] Podlubny I., “Fractional-order systems and PIλDμ-controllers”, IEEE Transactions Automation Control, Vol.44, pp.208-214,1999 [9] B. M. Vinagre, I. Podlubny, A. Hernandez, V. Feliu: On realization of fractional-order controllers.Conference Internationale Francophone d’Automatique, Lille, Jule 5-8, 2000.
λ µ
λ µ
Gc ( z ) =
Tt T + i−1 + Td s ( z −1 ) −1 1/ n s( z ) s( z )
(12)
按同样的方法将(5)带入可得 TID 控制器的离散状态表达式:
Gc ( z ) = [ L / T ]
r =0
Tt
r 1/ n
∑C
z
L [ ]− r T
+ Ti
T 1 − z −1 T + d T 1 − z −1
λ µ
Gc ( z ) = Tp +
Ti + Td s ( z −1 ) µ −1 λ s( z )
(10)
其中,积分器阶次 λ 和微分器阶次 µ 均为任意非负实数。 Tp , Ti , Td 分别是比例器、积分器和 微分器的增益,均为常数。将(5)带入(10) ,可得到分数阶 PI λ D µ 控制器离散状态表达式:
3.2 分数阶控制器
分数阶控制器有许多种,其中 PI λ D µ 控制器和 TID 控制器较多引起人们的重视。分数阶 【 8】 ,与其它类型的控制器相比,PI λ D µ 控制器能更精确 PI λ Dµ 控制器最早由 Podlubny 提出 的达到系统所需的性能指针,调节灵活。然而要使该控制器用于数字控制中,就有必要研究 它在离散系统中的工作特性。 根据本文上一部分所述分数阶离散系统的数学描述方法, 我们 考虑图 1 中 PI D 控制器 Gc ( z ) 的传递函数:
U(z) -
E(z)
Y(z)
Gc ( z)
Go ( z)
G f ( z)
图 1 分数阶离散控制系统
以上分数阶控制系统在开关始终闭合时为一连续系统,其时域模型可以由下式建立:
a Dα
n
n
y (t ) +
a Dα
n −1
n −1
y (t ) + +
a Dα
0
0
y (t ) =
b D
m
β mu ( t ) + β b m −1 D
s ( z −1 ) =
1 − z −1 T
(4)
对 (1 − z −1 )α 进行幂指数展开,于是得到 Grünwald-Letnikov 定义下的 Z 域表达式:
1 = [ s( z )] = α T
−1 α
D |
α t t = kT
∑ ( −1)
r =0
L T
r
α −r T z r
r Cβ u (k + [ m
L 1 ] − r ) + b m −1 β m −1 T T
[L /T ]
∑
r =0
r Cβ u(k + [ m −1
L 1 ] − r ) + + b 0 β0 T T
[L /T ]
∑
r =0
r Cβ u (k + [ 0
上式即为分数阶离散系统的差分方程描述。 式中的记忆长度 L 在理论上是趋于无穷的, 因此 我们得到的是一个近似的离散系统表达式, 由此可以对分数阶系统进行近似时域内的参数辨 识,这不在本文的讨论范围之内。
分数阶离散控制系统的建模与离散控制器
李元凯 1 赵世武 2
1. 重庆邮电学院自动化学院, (400065) 2. 滁州学院物理系, (239012)
E-mail:1. zhaoshiwu2000@ ; 2. liyuankai@
(13)
3.3 举例
考虑图 1 所示分数阶离散反馈系统,用带有限记忆的差分方程对其进行建模,设被控系 统 Go ( z) 为 有 限 阶 次,有关 参 数 为 a0 , a1 , a2 ; α 0 = 0, α1 , α 2 ; b0 = 1; β0 = 0 , PI D 控制 器
λ µ
Gc ( z) 的相关参数为 Tp , Ti = 0, Td , λ = 0, µ ,引入单位负反馈使得系统获得理想的稳态性能
L L ] − r ) = T pe ( k + [ ] − r ) + T T T
d
1 Tµ
∑
r =0
r Cµ e (k + [
L ] − r) T
其中, k = 1, 2, ,其二项式系数由(6)式求得。
4 结论
本文将连续的分数阶微分算子离散化,并应用于描述系统的分数阶微分方程中,得出分 数阶离散系统的数学模型。 这种数学模型能够方便的进行数字控制。 由于分数阶次的无限记 忆性, 文中所得的离散系统差分方程是真实系统的近似描述, 但只要在建模时适当选取采样
L ] − r) + T
a
n −1
1 T α n −1
[ L /T ]
∑
r=0
r Cα y (k + [ n −1
L ] − r) + + T
a
0
1 T α0
[ L /T ]
∑
r=0
r Cα y (k + [ 0
L ] − r) T L ] − r) T
(9)
b
1 T
βm
[ L /T ]
∑
r=0
L
(5)
其中 T 为离散系统采样间隔时间,L 为离散近似表达式所保留的记忆长度, [ x] 表示 x 的整
r 数部分, ( −1)r α 是分数二项式系数 Cα ,它存在如下递推公式:
r
0 Cα = 1,
r Cα = (1 −
1 + α r −1 )Cα r
(6)
文献【9】中论述了更详尽的近似方法来对分数阶系统进行连续域和离散域建模,均源 于上述 Grünwald-Letnikov 定义式和 Riemann-Liouville 定义式。
和动态性能。于是可以得出连续域的分数阶系统闭环传递函数: a 2 D α 2 y ( t ) + a1 D α 1 y ( t ) + T d D µ y ( t ) + ( a 0 + T p ) y ( t ) = T p e ( t ) + T d D µ e ( t ) (14)
将系统以 T 时间间隔采样,取记忆长度为 L 进行离散化,可得表示离散化系统的差分方程:
-3-
Gc ( z ) = Tp + [ L / T ]
r =0
Ti
L [ ]−r r T λ
∑C z
+ Td
[L/T ] r =0
∑C
r µ