CAN智能节点设计
基于STM32F107微处理器的CAN总线的智能节点的设计
STM3 2 F1 0 7 Mi c r op r o c e s s o r Ba s e d I n t e l l i g e n t No d e o f CAN Bu s De s i gn
功 能 。工业现场 的C A N总 线 系 统 可 由
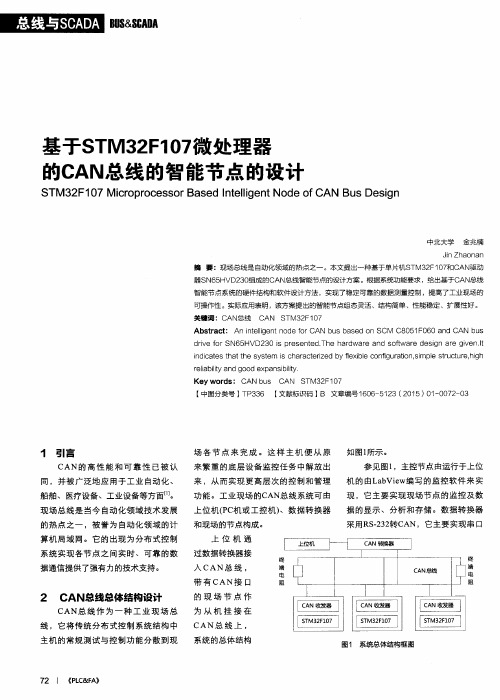
如 图l 所示 。
参见 图1 ,主控 节点 由运行于 上位 机 的 由L a b Vi e w编 写的监控 软件 来 实 现 ,它主要 实现 现场节 点的监控 及数 据 的显示 、分析 和存储 。数据 转换器
采 用 RS - 2 3 2 转C AN, 它 主要 实 现 串 口
中北大 学
金 兆楠
J i n Zha on an
摘 要 :现场 总线 是 自动 化领域 的 热点之 一 。本 文提 出一种 基 于单 片机 S T M3 2 F1 0 7 ¥ E I CAN - 5  ̄ 1 动 器SN6 5 HVD2 3 0 组 成f l g CAN 总 线智能 节点 的设计 方案 。根据 系统功 能要求 ,给 出基于 C AN总线
Ab s t r a c t : An i n t e l l i g e n t n o d e f o r C AN b u s b a s e d o n S CM C8 0 5 1 F 0 6 0 a n d CAN b u s
dr i v e f or SN65HV D230 i s p r es en t e d. Th e h ar d w ar e an d s of t war e de si gn ar e gi v en I t i nd i c a t e s t h at t h e sy s t em i s c ha r ac t er i z e d b y l f ex i b l e c on i f gu r a t i on , si mp l e s t r uc t ur e, hi gh r el i ab i l i t y an d g oo d e xp an si bi l i t y
CAN总线节点软件的设计与实现的开题报告

CAN总线节点软件的设计与实现的开题报告一、选题背景CAN总线作为一种现代通信技术已经得到很广泛的应用,尤其在汽车电子、机械自动化等领域中。
CAN总线节点软件设计是CAN总线应用的基础,其主要任务是实现CAN网络中节点的数据收发以及处理,控制节点的状态机状态转换,实现数据信号的解析和封装等关键功能。
本次选题的背景是本人目前所在的公司正在开展CAN总线应用方面的业务拓展,并需开发针对不同应用场景的CAN总线节点软件。
因此,设计与实现一款通用可靠的CAN总线节点软件具有重要的现实意义和实践价值。
二、研究目的和意义CAN总线节点软件是CAN网络应用中的关键部分,研究其设计与实现具有下列目的和意义:1. 提升CAN总线应用的可靠性和稳定性CAN总线应用涉及到的设备种类繁多,节点布局分散,通常需要长时间持续运行,因此,CAN节点软件需具有高可靠性和稳定性,避免因软件问题导致系统中断或出错,从而造成严重的后果。
2. 提高CAN总线应用的通用性和灵活性CAN总线应用与行业领域相关度高,节点的属性和应用场景多种多样,因此开发一款具有通用适用性的CAN总线软件非常重要,可减少时间成本和开发难度,并提高软件的灵活性与可定制性。
3. 探究CAN总线节点软件的设计与实现方法CAN总线节点软件运行稳定可靠的关键在于其设计与实现,探究其中的技术路线和方法,能够充分挖掘CAN总线应用的潜力,为后来的CAN应用开发提供借鉴和优化,同时拓展和深化本人在CAN总线技术方面的理论和技术水平。
三、拟解决的问题CAN总线节点软件在实施过程中,通常会遇到以下问题:1. CAN数据的收发过程中容易发生数据丢失或者数据冲突的情况,造成数据传输失效或者底层硬件工作异常。
2. 状态机设计困难,难以实现各个节点之间状态的转换,而状态的转换对于整个系统的稳定性起着至关重要的作用。
3. CAN数据帧的解析封装过程比较复杂,因为CAN数据帧包含了多个不同的字段,而这些字段的解析需要考虑到底层硬件的特性和约束。
基于LPC2119的CAN总线智能节点的设计

引言
微 控 制 器 与 C N总 线 连 接 的传 A 统 方 式 是 将 C U与 总 线 控 制 器 和 总 P 线收发 器相连 后再接 入总线 网络 , 这 样 使 C U外 围 电路 复 杂 化 ,整 个 P
系 统 受 外 部 影 响 较 大 。为 了 解 决 这
维普资讯
设计应 用 D i & pl t s eg Ap a n sn i . cO
基于 L 的C 总线 2 P 19 A C 1 N 智能节点的设计
Desgn ofI t l i elgen n i tCAN B s Node B ed on L C21 u as P 9 1
接收 。
T A15 J 0 0的 特 性 , 本 设 计 中 C AN 终 动 C N 等 。 设 置 总 线 波 特 率 是 个 A
C N 智 能节 点硬 件 电 路 A
C N接 口部 分 包 括 LC 1 ( A P 2 1 内 9 置 C N控 制 器 ) A 、光 电 耦 合 器 和 总 线 收发器 , 图 1 示 。 如 所
端 电 阻 使 用 了分 裂 终 端 , 总 线 端 难 点 , 有 C 即 所 AN节 点 的 波 特 率 要 相 要 节 点 的 两 个 终端 电阻都 被 分 成 两 个 同 才 能 正 常 工 作 , 注 意 正 确 配 置 等 值 的 电 阻 ,用 两个 6 Q的 电阻 代 V B l 0 P DV和 P L寄 存 器 。 L
有 : 个 总 线 上 的数 据 传 输 速 率 高 单
达 1 / ;2位 寄 存 器 和 R M 访 问 ; Mbs 3 A
¨ ・ 1 CA 智 能 节 点 硬 件 电路 豳 N
基于CAN总线的油库自动发油监控系统智能节点设计
嗍络的构建 ,使 以太 例贯穿 于从探 作站到每 能终端的整 ’ 个智
个J 区,进 使从 mete 的一 个终端就 n 以管耻变I站 的智 r t h J .
能 终端 成 为 日能 。 口 J ‘ 。
参 考文 献
r
3 软 件设计
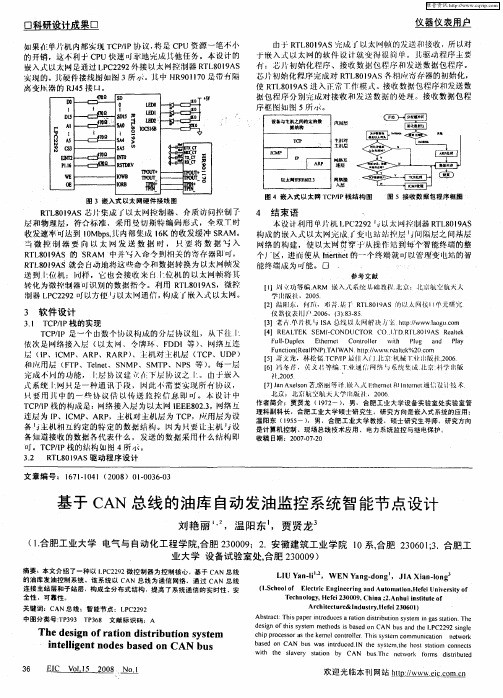
31 T PI 的 实 现 . C/ P栈 T / 足一 个 由数 个 协 议 构 成 的 分 层 议组 , 从 下 往 CPI P 依次足删络接入层 ( 以太 、 令 牌 环 、F DDI等 ) 、恻 络 且 连 层 (P C I、I MP 、A P R 、R P 、主 机 对 主 机层 ( C 、UD ) AR ) T P P 和 用 层 ( T 、T Ie、S F P ent NMP MT 、 NP 等 ) 、S P S 。每 一 层 完 成 川 的 功 能 , l : 层 、 议 : 下 层 议 之 卜 由十 嵌 入 。 系 统 叫只 是 一 种 通 讯 . , 此 需 要 实 现 所 自。 r段 I , 办议 用 J 的 一 些 协 议借 以传 送 舱拎 信 息 巳 J 中 I 。 j 。奉 砹 计 中 n T PI 的构 成 足 : 络 接 入 层 为 以 太 I E 8 23 C/ P栈 恻 E E 0 .,删络 且 连 层 为 I 、I P CMP 、A , 主机 对 主 机 层 为 T P 用 层 为 设 RP C , 需 ’主机; . 约定的特 定的数据结构 。 为 要 让主 机 f且 日 备知道接收 的数据 再代表什 么 ,发送 的数据 采用什 么结构 即 日。 T PI 的 结 构 如 4所 , 。 J C/ ’ P栈 J ÷ 32 R L 0 9 S驱 动 程 序 设 计 . T 8 lA
图 5 接 收数 据包 程序框凰
手把手教你设计CAN总线系列讲座(2)
手把手教你设计CAN总线系列讲座(2)—CAN总线智能节点的设计在远程测控系统中,都要通过传感器或其他测量装置获取环境或相关的输入参数,传送到处理器,经过一定的算法,做出相应的控制决策,启动执行机构对系统进行控制,基于CAN总线的测控系统将单个测控设备变成网络节点,将控制系统中所需的基本控制、运行参数修改、报警、显示和监控等功能分散到各个远程节点中。
因此总线上的节点应该具有总线通信功能和测控功能,这必然离不开微处理器。
我们把具有这类功能的节点叫智能节点。
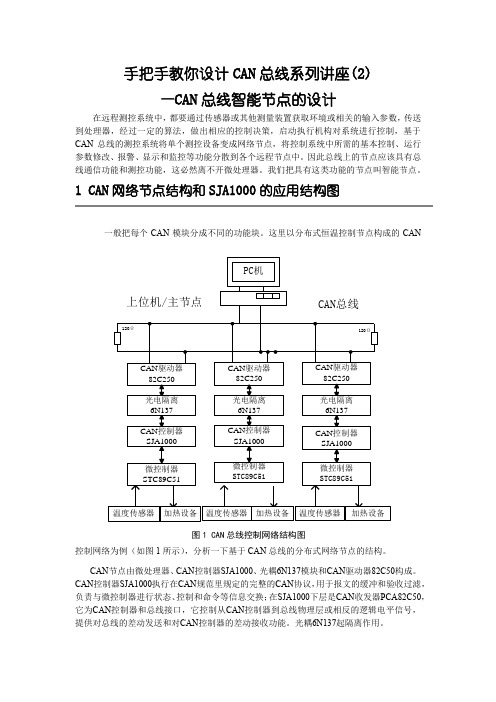
1 CAN网络节点结构和SJA1000的应用结构图一般把每个CAN模块分成不同的功能块。
这里以分布式恒温控制节点构成的CAN图1 CAN总线控制网络结构图控制网络为例(如图1所示),分析一下基于CAN总线的分布式网络节点的结构。
CAN节点由微处理器、CAN控制器SJA1000、光耦6N137模块和CAN驱动器82C50构成。
CAN控制器SJA1000执行在CAN规范里规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C50,它为CAN控制器和总线接口,它控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器的差动接收功能。
光耦6N137起隔离作用。
图2 SJA1000的结构图所有这些CAN模块都由微处理器控制,它负责执行应用的功能,负责控制执行器(比如加热设备)、读传感器(比如温度)和处理人机接口。
如图2是SJA1000的应用结构图。
在CAN规范里,CAN核心模块控制CAN帧的发送和接收。
接口管理逻辑负责连接外部微处理器,该控制器可以是单片机、DSP或其他器件。
经过SJA1000复用的地址/数据总线访问寄存器和控制读写选通信号。
SJA1000的发送缓冲器能够存储一个完整的报文(扩展的或标准的)。
当微处理器初始化发送接口管理逻辑,CAN核心模块就会从发送缓冲器读CAN报文。
基于SJA1000的CAN智能测控节点设计
机器人 控制器设计 ,经实验验 证 ,具有结构简单 ,扩展性强 , 实时性好 ,可靠性高等优点 。
【 参考文献 】
【 1 】 王 慧锋 , 何衍 庆 . 现 场总 线控 制 系统原 理及 应 用【 M】 . 北 京: 化 学工 业 出版社 , 2 0 0 6
[ 2 】 李正军. 现 场 总 线及 其 应 用 技 术 [ M】 . 北京: 机 械 工 业 出版
版 社. 2 0 1 1 : 5 9 4 -6 1 0
4应 用效 果 评价
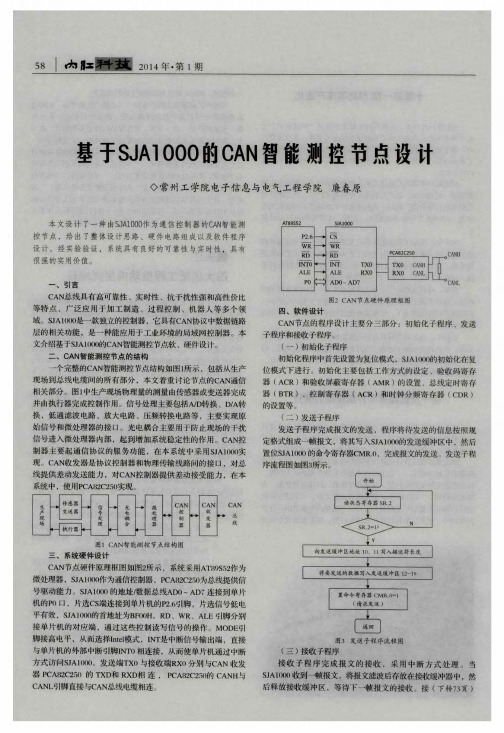
( 上接 5 8 页 )收子 程序 流 程 图如 图4 所示 。
五 、结语
本文设计了以S J A 1 0 0 0 作为通信控制器的智能测控节点 ,讨
论了系统 的硬件 电路和软件程序设计 。该系统已应用于 多关节
L H 2 9 — 2 — 2 井由1 4 6 1 m 钻进 至2 3 8 7 m,裸 眼段长9 2 6 m,短 起下过程顺利。表现 出H E M钻井液体系具有良好 的低温流变性 及性能 比较稳定 ,隔水管等大井眼 中的携砂没有问题。 L H 2 9 — 2 — 2 井在整 口井钻进过程 中,整 口井井底钻井液循环 当量比重 ( E C D) 都相对稳定 ,和实际钻井液比重呈现0 . 0 2 g / c i i 1 a 至0 . 0 3 g / c m 增量 ,这个数据和D r l l b e n c h 软件算出来的值也相吻 合 ,表明钻进期间井眼相对比较清洁。
基于C8051F550的CAN总线智能节点的设计
f 计 数 器模 块 1等 。本 文 重 点 就 模 拟 量 输 入 模 块 如
和 开 关 量 输 入 模 块 的设 计 。采 用 具 有 C N接 口的 A
2 智 能 节 点 硬 件 设 计
传统 的从节 点设 计 是将 C U AN P 与C 总线 控 制器
C 0 1 5 0 片机 作为 系 统设 计 的从 节 点 ,用 来 采 85 F 5 单 集模 拟量 和 开 关 量 。实 现 与 上 位 机 中央 控 制 器 的
通信
1 C N总 线通 信 网络 系统 A
如 图l 所示 ,本设 计 中通 过 带有 终端 器 (2 欧 10
B se C N全 功能 的C N 块 实 现 .符 合 C N . ohh A A 模 A 20 B
电 阻)的 通信 介 质 ( 绞 线)将 上 位 机 和底 层 模 块 双
连接 起 来 。 实 验 中 ,终 端 电 阻 和 双 绞 线 阻 抗 的 匹
协议 。工作 位 速率 可 达 1 b 。控 制 器包 含 有 一个 Mp s C N内核 ,消息 缓 冲 区 ,报文 处理 状态 机 和C N A A 控 制 寄 存 器 。通 信 控 制 器 有3 个 消 息对 象 ,可 以配 2
达 250 0 V的 直 流 电 压 。输 入 级 兼 容 33 . V和 5 V的
C M1 5 收发器 T 00
+ +
千 +
+ +
c O 15O 8 5 F 5 单片机 ‘ 8 5F 5 单片机 P C 0 5 0 1 CA8 C 5 收发器 2 20
行业 扩展 到 过 程 工 业 ,机 械 工 业 ,机 器 人 和 楼 宇
G 5 7 ,使P 机 直接 通 过U B 口就可 连人 C N YB 0 ) C S接 A
液压同步顶升系统的CAN总线智能节点的设计与应用

t l g n o ei u e y r u i y c r n u it gc n r l ed . c r i gt ea p i ai n. t e el e t d s di h d a l S n h o o sL fi o t ls Ac o d n t p l t i n s n c n of i Oh c o h CAN B si tl g m u el e n i n d s e c b d i etx a o lt f r a i nc l ci n. i f r ai n so a e i f r t nCAN e i l o o e s r e t t n c mp e ei o m t o l t d i nh e c n o e o n o m t t r g . n o ma i o o s r mmu i ac n・ c t n.2 2, ra o ao i 3 . i I mmu i ai . a do h r  ̄ t n . d s r e n t etx o t ed sg e c n to c n n te f i i s As e c b di h e t f h e i nmeh dC b e S AN o i t e a cs n a aC n e
Lco /f lc o i c n e n n t n g J nvri ,C a g h n10 ) S h o o Eet nc S i c d g ̄ n 。 mnU i sy h n cu 3 0 r s e a E 舱e e t 1 2
A bsr t: Thi a rde c i d aCAN si t lge od tucu eo e h d a ea o ̄ a ep oc d e , s c n— t ac sp pe s rbe Bu neli ntn esr t r ft  ̄ w r nd s h r r e ur s u hi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C N 点 主 要 有 三 部 分 组 成 ,微 控 制 器 、C 协 议 控 制 器 A节 N A
和C 总线 收发器 。硬件 电路 的设计主要是C N N A A 协议控制器 与 微 控制器 之 间的接 口电路 ,以及C 总线收 发器 与物理 总线 N A 之 问 的电路设计 。C 协议控 制器是 接 口电路 的核 心 ,它 主 N A 要完成C 总线的通信协议 ,而C N N A A 总线 收发器 的功 能是增大 通信 距离 ,保护 系统 不受干扰 。以下对 用到 的主要芯 片进 行
M P 5 5 是 一 款 具 有 标 准 串 行 外 设 接 口 ( e r a C2 1 Sa il P r p e a I tr a e P )的C N e i h r l n e f c ,S I A 协议控制 器 ,完全 支持
简单介绍。
1 0 。 ( )C 采用 的是 短帧 结构 ,每一 帧的有 效字节 1个 5 A N
数 为8 ,具有 C C 验 和其 它检 测 措施 ,数 据 出错 几 率 个 R校 小 。C N 点在错误 严重 的情况 下 ,具有 自动关 闭功能 , A节
2 1M P 5 5 . C 2 1 简介
po tb l ya d S n ra i t n O o . i Ke r sDitiu e n r l y t m ; ywo d : srb td Co to se CAN usI el e ;o tbl y S B ; ntlg ntP ra it i i
l 引言 CN (o t o l r A e ew r ) 线 ,又 称控 制 器 A C n r l e r a N t o k 总 局 域 网,是B sh 司在现代 汽车 技术 中领先推 出的一种 oc公 多主 机局部 网。由于其卓越 的性 能 ,极高 的可靠 性,独特 灵 活 的设计 和 低廉 的价 格 ,现 己广 泛应 用于 工业 现 场控 制 、智能大 厦、小区安防 、交通 工具、 医疗 仪器 、环境监 控 等众 多领域 。C 已被 公认为 几种最 有前途 的现场 总线 N A 之 一 。C N 线规 范 已被 I O A总 S 国际 标准 组 织制 订 为 国际标 准 ,C 协议 也是建 立在 国际标 准组织 的开放 系统互 连参 N A
ditiutd c n r l s se .t i el e t s o s rb e o to y t m Is ntli n h w i g o a ptbit f r v ro m ir p o e s r , i h daa g n: o d da a l y o a i us i c o r c s o sh g t t r u h u , e fc r a・i e o munc to ,i l crui nd o t r d sg ,to g n ii tree c a i t, ie h o g p tp re t e lt c m m iai n smp e ic t a s fwa e e i nsr n a t-n ef r n e b ly nc i
CN A 系统节 点 ,存 在如地 址 、数 据总 线的分 时复用 常导致接 口效率低 下;接收 、发送 缓冲区 的个数太 少,导致数据吞 吐 率不 高;帧屏蔽和过滤器 的设置不够灵活 ,不能满足 同时需
要更 多屏 蔽和过 滤条件 的要求等 缺 点。本设 计基于 带SI P接
口的独立C N A 控制器M P 5 5 C 2 1 ,可以克服上述 问题。
D : 1 . 9 9 jsn1 7 —6 9 .01 .60 4 OI 5 6 / .s. 6 1 5 62 1 .0 0 i I
Absr c : i a e r s n sa d sg fC ta tTh sp p rp e e t e i n o AN u n el e tn d swh c ly h o e i n a d c h rnc oe i h b si tlg n o e ih p a st e c h so n o e e er l n t e i
厂 _ ]
董
张 大 智
( 中国 电子科技 集 团公 司第二十研 究所 ,陕西 西安 7 0 8 1 6) 0
摘
要 :本 文提 出了一 种在 分布 式控 制 系统 中起 着承 上启 下作 用 的C N A 总线智 能 节点的设 计方案 。其 智能化体 现在 能适
应 多种微 处理 器、数据吞 吐率 高、通讯 实时性好 、 电路和 软件设 计 简单 、抗 干扰 能力 强、可移植性好 等方 面。 关键 词 :分布 式控 制 系统 ;C N A ;智 能化 ;移 植性
2 节点硬件设计
CN 点系统框 图如 图1 A节 所数据链路层和物 理层 ,用户
可在其基础上 开发适合系统 实际需要 的应用层通 信协议 , 但 由于C 总线极 高的可靠 性 ,从而使 应用层 通信协 议得 N A 以大大简化 。 C 总线有 以下 特 点: ( )C N 以是对 等结构 ,即 N A 1 A可 多主机工作方 式,网络上任 意一个节点可 以在任意时刻主 动地 向 网络上 其它节 点发送 信息 ,不分主 从 ,通 讯方式 灵活 。 ( )C 网络上 的节 点可 以分为不 同的优先级 ,满 2 A N 足不 同的实时需要 。 ( )C N 3 A 采用非破坏性 仲裁技术 ,当 两个节点 同时向网络上传送信 息时 ,优先级 低的节点 自动 停止发送 ,在 网络负载很重 的情况下不会 出现网络瘫痪 。 ( )C 可 以点对点 、点对 多点、点对 网络 的方式发送和 4 A N 接 收 数 据 , 通 讯 距 离 最 远 1 k (k / ) 0 m 5 b s ,节 点数 目可达