汽车CAN总线系统智能节点的设计
CAN总线网络设计

1 引言can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。
由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。
本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
2 系统总体方案设计整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。
上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。
上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。
传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。
本设计can总线传输介质采用双绞线。
图 1 can总线网络系统结构3 can总线智能网络节点硬件设计本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。
该智能节点的电路原理图如图2所示。
该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
图2 can总线智能网络点3.1 lpc2119处理器特点lpc2119是philips公司推出的一款高性价比很处理器。
基于CAN总线温度测量智能节点的设计
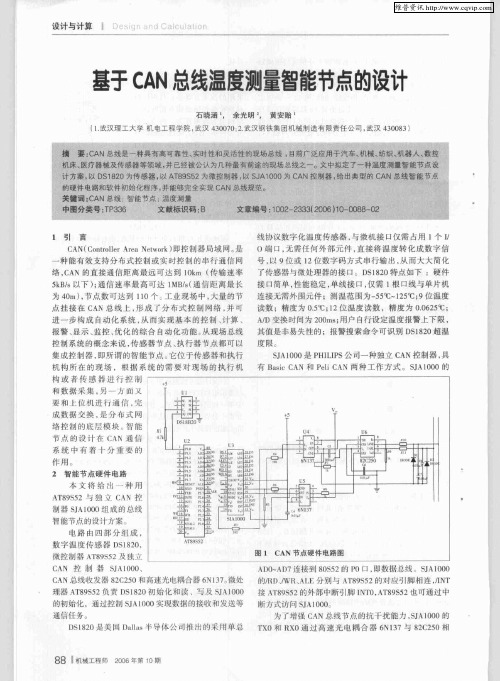
电路 由 四 部 分 组 成 .
数 字 温 度传 感 器 D l2 , S 0 8 微控 制 器 AF9 5 8S 2及独立 C N 控 制 器 SAl0 A J 00、 C N总线 收 发器 8C 5 A 2 2 0和 高速光 电耦合器 6 3 微处 Nl7 理器 A 95 T8S2负责 DS 2 1 0初 始 化 和读 、写 及 SA10 8 J 00 AD ~ D O A 7连接 到 8S 2的 P 05 O口 . 即数据 总线 SA10 J 00
维普资讯
设 计 与计 算
基 A 总线温度测 于CN 量智能节点的 设计
石晓涵 余光 明 黄安贻 . . 武汉理 工大学 机电工程学院 , 武汉 4 0 7 :. 3 0 0 2武汉钢铁集 团机械制造有 限责任公 司, 武汉 4 0 8 30 3
一
CA C nrl rAe ew r 即控 制 器局 域 网 。 N( ot l raN tok) oe 是 种 能 有效 支 持 分 布式 控 制 或 实 时控 制 的 串 行 通 信 网
络 ,A C N的直接通信距离最远可达到 1k ( O m 传输速率
5 Bs以下 )通 信 速 率 最 高 可 达 1 /( 信 距 离 最长 接 口简单 , 能 稳 定 . 线 接 口 , k/ ; MBs 通 性 单 仅需 1根 口线 与 单片 机 为 4 m)节 点 数 可达 到 lO个 : 业现 场 中 , 量 的节 连 接 无需 外 围 元件 ;测 温范 围为 一 5C 15C; 0 , 1 工 大 5  ̄一 2 ' 9位温 度 : 点挂 接 在 C N 总 线 上, 成 了 分 布式 控 制 网 络 , 可 读 数 ;精 度 为 0 ℃ ;2位温 度 读 数 .精 度 为 0 6 5 ; A 形 并 . 1 5 . 2℃ 0 进 一 步构 成 自动 化 系 统 , 而 实 现 基 本 的 控 制 、 算 、 A D变换 时 间为 2 0 ; 从 计 / 0 ms用户 自行设 定 温度 报警 上 下 限 , S 80超 报警 、 显示 、 控 、 化 的综 合 自动 化功 能 : 现 场 总线 其 值 是非 易 失性 的 ;报警 搜 索命 令 可 识别 D 12 温 监 优 从 控制 系 统 的 概念 来说 , 感 器节 点 、 行 器 节 点 都 可 以 度 限 传 执 集 成控 制 器 , 所谓 的智 能 节点 。 位 于 传感 器 和 执 行 即 它
基于LPC2119的CAN总线智能节点的设计

引言
微 控 制 器 与 C N总 线 连 接 的传 A 统 方 式 是 将 C U与 总 线 控 制 器 和 总 P 线收发 器相连 后再接 入总线 网络 , 这 样 使 C U外 围 电路 复 杂 化 ,整 个 P
系 统 受 外 部 影 响 较 大 。为 了 解 决 这
维普资讯
设计应 用 D i & pl t s eg Ap a n sn i . cO
基于 L 的C 总线 2 P 19 A C 1 N 智能节点的设计
Desgn ofI t l i elgen n i tCAN B s Node B ed on L C21 u as P 9 1
接收 。
T A15 J 0 0的 特 性 , 本 设 计 中 C AN 终 动 C N 等 。 设 置 总 线 波 特 率 是 个 A
C N 智 能节 点硬 件 电 路 A
C N接 口部 分 包 括 LC 1 ( A P 2 1 内 9 置 C N控 制 器 ) A 、光 电 耦 合 器 和 总 线 收发器 , 图 1 示 。 如 所
端 电 阻 使 用 了分 裂 终 端 , 总 线 端 难 点 , 有 C 即 所 AN节 点 的 波 特 率 要 相 要 节 点 的 两 个 终端 电阻都 被 分 成 两 个 同 才 能 正 常 工 作 , 注 意 正 确 配 置 等 值 的 电 阻 ,用 两个 6 Q的 电阻 代 V B l 0 P DV和 P L寄 存 器 。 L
有 : 个 总 线 上 的数 据 传 输 速 率 高 单
达 1 / ;2位 寄 存 器 和 R M 访 问 ; Mbs 3 A
¨ ・ 1 CA 智 能 节 点 硬 件 电路 豳 N
手把手教你设计CAN总线系列讲座(2)
手把手教你设计CAN总线系列讲座(2)—CAN总线智能节点的设计在远程测控系统中,都要通过传感器或其他测量装置获取环境或相关的输入参数,传送到处理器,经过一定的算法,做出相应的控制决策,启动执行机构对系统进行控制,基于CAN总线的测控系统将单个测控设备变成网络节点,将控制系统中所需的基本控制、运行参数修改、报警、显示和监控等功能分散到各个远程节点中。
因此总线上的节点应该具有总线通信功能和测控功能,这必然离不开微处理器。
我们把具有这类功能的节点叫智能节点。
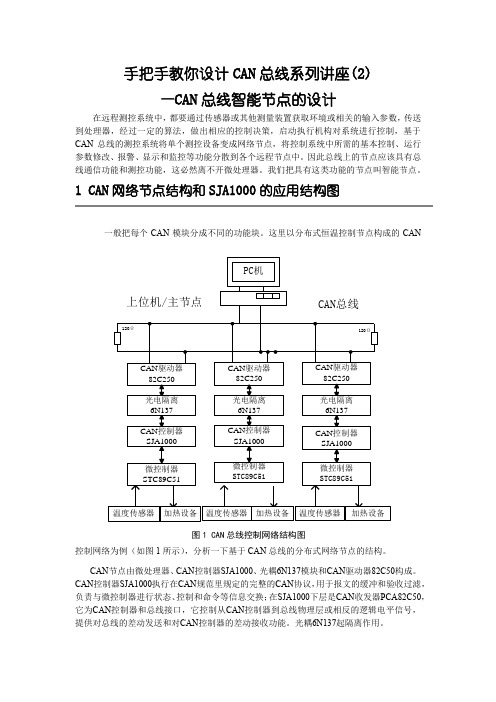
1 CAN网络节点结构和SJA1000的应用结构图一般把每个CAN模块分成不同的功能块。
这里以分布式恒温控制节点构成的CAN图1 CAN总线控制网络结构图控制网络为例(如图1所示),分析一下基于CAN总线的分布式网络节点的结构。
CAN节点由微处理器、CAN控制器SJA1000、光耦6N137模块和CAN驱动器82C50构成。
CAN控制器SJA1000执行在CAN规范里规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C50,它为CAN控制器和总线接口,它控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器的差动接收功能。
光耦6N137起隔离作用。
图2 SJA1000的结构图所有这些CAN模块都由微处理器控制,它负责执行应用的功能,负责控制执行器(比如加热设备)、读传感器(比如温度)和处理人机接口。
如图2是SJA1000的应用结构图。
在CAN规范里,CAN核心模块控制CAN帧的发送和接收。
接口管理逻辑负责连接外部微处理器,该控制器可以是单片机、DSP或其他器件。
经过SJA1000复用的地址/数据总线访问寄存器和控制读写选通信号。
SJA1000的发送缓冲器能够存储一个完整的报文(扩展的或标准的)。
当微处理器初始化发送接口管理逻辑,CAN核心模块就会从发送缓冲器读CAN报文。
基于C8051F550的CAN总线智能节点的设计
f 计 数 器模 块 1等 。本 文 重 点 就 模 拟 量 输 入 模 块 如
和 开 关 量 输 入 模 块 的设 计 。采 用 具 有 C N接 口的 A
2 智 能 节 点 硬 件 设 计
传统 的从节 点设 计 是将 C U AN P 与C 总线 控 制器
C 0 1 5 0 片机 作为 系 统设 计 的从 节 点 ,用 来 采 85 F 5 单 集模 拟量 和 开 关 量 。实 现 与 上 位 机 中央 控 制 器 的
通信
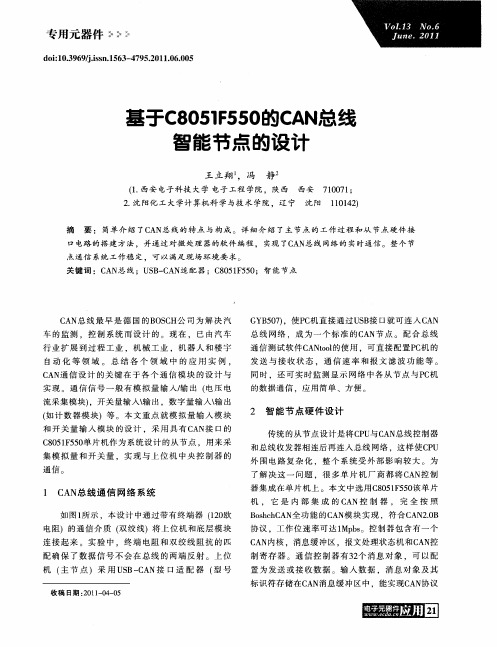
1 C N总 线通 信 网络 系统 A
如 图l 所示 ,本设 计 中通 过 带有 终端 器 (2 欧 10
B se C N全 功能 的C N 块 实 现 .符 合 C N . ohh A A 模 A 20 B
电 阻)的 通信 介 质 ( 绞 线)将 上 位 机 和底 层 模 块 双
连接 起 来 。 实 验 中 ,终 端 电 阻 和 双 绞 线 阻 抗 的 匹
协议 。工作 位 速率 可 达 1 b 。控 制 器包 含 有 一个 Mp s C N内核 ,消息 缓 冲 区 ,报文 处理 状态 机 和C N A A 控 制 寄 存 器 。通 信 控 制 器 有3 个 消 息对 象 ,可 以配 2
达 250 0 V的 直 流 电 压 。输 入 级 兼 容 33 . V和 5 V的
C M1 5 收发器 T 00
+ +
千 +
+ +
c O 15O 8 5 F 5 单片机 ‘ 8 5F 5 单片机 P C 0 5 0 1 CA8 C 5 收发器 2 20
行业 扩展 到 过 程 工 业 ,机 械 工 业 ,机 器 人 和 楼 宇
G 5 7 ,使P 机 直接 通 过U B 口就可 连人 C N YB 0 ) C S接 A
基于CAN总线分布式控制系统智能节点的设计

维普资讯
设 计 天 地 /" /
一
, ,
\
、
基 于 CAN 总 线 分 布 式 控 制 系 统
智 能 节 点 的 设 计
Th e i n f rI t li e tN o e o CS Ba e N eD sg o n e lg n d fD s d CA Bus
强 有 力的 技 术 支持 。C N C nrl r ra e ok属 于 能 是 高 电平 或 悬浮 状 态 ,C N A ( o t l e t r) oe A N w A L端 只能 是 低 电平 或 悬 浮 现 场 总线 的 范 畴 ,它是 种 有效 支 持 分布 式 控 制或 实 时 状 态 。这 就 保证 不 会 出现 象 在 R 一8 网络 中 ,当系统 有 S4 5
维普资讯
\
\
勉
信号 的 传输 , 而总 线 两端 接 有终 因 端 电 阻R1 R2以 消 除 反射 信号 , 、 , 其 阻 值约 等 于传 输 电缆 的 特性 阻 抗 。
■ ■ 玎r ● l r 册
/
软 件 设 计
C AN总 线节 点要 有效 , 实时 地 完 成 通 信 任 务 ,软 件 的 设 计 是 关 键 ,也是难 点 。它主 要 包括 节 点初
而 代 之 以对 通 信数 据 进 行 编码 ,这 可使 不 同 的节 点 同时 及 其接 口芯 片来 实 现 , 而 大大 降 低 系统 开 发难 度 , 短 从 缩
接 收 到相 同 的数 据 , 衅 特 点使 得 c N总 线 构 成 的 网络 了开发 周 期 , 些是 只 仅 仅有 电气协 议 的 R ・8 所 无法 这 A 这 s4 5 各 节点之 间的 数 据通 信 实 时性 强 ,并 且容 易构 成 冗余 结 比拟 的 。 另外 ,与其 它 现场 总 线 比较 而 言 , A 总 线是 C N 构 ,提 高 系 统 的可 靠性 和 系 统的 灵 活性 。而 利 用 R 一8 具 有 通 信速 率 高 , 易 实现 , S4 5 容 且性 价 比高等 诸 多特 点 的 一
基于CAN总线的车载智能终端硬件设计
编程 F ah存 储 器 , 用 高 密 度 非 易 失性 存 储 器 技 ls 采
术 制造 , 与工业 8 C 1产 品指 令 和引脚 完全兼 容 。 O5
1 2 2 CAN 控 制 器 的 选 择 . .
S A1 0 是 一 款 独 立 的 C J 00 AN 控 制 器 , 泛 应 广 用 于汽车 和一般 工业 环 境 中 的控 制器 局域 网络 。它
内的节点 数 在理 论上不 受 限制 。另外 , AN 总线 的 C 通 信介 质多样 , 以是 双绞 线 、 可 同轴 电缆 或光 纤 。在
C AN 收 发 器 是 C AN 协 议 控 制 器 和 物理 总线
成本 上 , 基于 C AN 的车 用 总 线 具 有 较 强 的 市 场竞
争力 , 普遍 认为 是 车载 网络 领 域 最 有 发 展 前 途 的 被
之 间 的接 口, 为总 线提 供 差动 的发 送 和接 收功 能 , 是 C AN 系统 中的 必 须 设 备 。该 智 能 终 端 选 用 常用 的
C AN 收 发 器 即 P A8 C 5 C 2 2 0作 为 C AN 控 制 器 S AI 0 J O 0和 C AN 总 线 间 的 接 口, 现 对 总 线 的差 实
摘 要 : 据 车 载 智 能 终 端 的 需 要 , 计 了 基 于控 制 器局 域 网 C 根 设 AN 总 线 的 车 载 智 能 终 端 硬
件 电路 , 并对 信 号 传 输进 行 抗 干 扰 处 理 ; 拟 实验 表 明 所 设 计 的 系统 能 够 正 确 读 取 C N 帧 报 文 信 模 A
随着 汽车工 业 的发展 , 车 变得 越来 越 电子 化 、 汽
智 能化 、 网络化 , 电子 设 备及 线 路越 来 越 多 。该 文拟 设计 基 于控 制 器 局 域 网 C N( o t l rAraN t A C nr l e e— oe w r) ok 总线的汽 车智 能终 端 , 汽 车上 的多路 传感 器 将 信号通 过 C N 总线传 输 到智 能终 端 上 , A 以实 现对 车
C8051F040的车用CAN总线智能节点设计
总 线智 能 节 点 , 可将 车 辆 电气 系统 各 子 系 统 及设 备 紧 密 联
系 在 一起 , 成 一个 实 时控 制 网络 , 图 1所示 。 构 如
一
C AN总线
~
计 方法 遇 到 了一 系列 问 题 : 路 增 多 、 线 布线 复杂 、 电磁 干扰
增 加 、 统 可 靠 性 下 降 、 查 维 修 困难 等 。 为 了 解 决 上 述 系 检 问题 , 代 车 辆 采 用 了 综合 电 子 系统 。总 线 是 综 合 电子 系 现 统 的基 础 , 通过 总线 节 点 , 合 电子 系 统 可 采 集 、 用 、 综 使 分
K y wo d e r s:v h ce CAN b s i t l g n o e C8 5 F0 0 e il ; u ;n e l e tn d ; 0 1 4 i
电气 与 电子 系 统是 车辆 的重 要 组 成 部 分 , 工 作 状 态 其
过 总 线 收 发 器将 数 据 发 送 到 CAN 总 线 , 时根 据 参 数 及 同 总 线 上 的 其 他 信 息 和 命 令 对 设 备 进 行 控 制 。通 过 C AN
It l e tNo e i hi e CAN Bu sem s 0 F0 0 nelg n d n Ve cl i s Sy t Ba ed on 08 51 4
W a g Zh g o ,Ga f n n iu 。 o Yu e g ,Li l ng , Li Xu l n u Ya o i ei a
能 节点 的设 计 方 法 , 出 了硬 件 原 理 图和 软件 流程 图。该 智 能 节 点 已经 应 用 于某 车 辆模 拟 教 学 系统 , 用情 况 良好 。 给 应
C8051F040的车用CAN总线智能节点设计
C8051F040的车用CAN总线智能节点设计
王治国;高玉峰;刘亚龙;吕雪莲
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2010(000)010
【摘要】为了解决传统设计方法带来的问题,现代车辆广泛采用了综合电子系统.总线是综合电子系统的基础,CAN总线由于具有多种优点,在综合电子系统中得到了广泛应用.文章详细介绍了一种以C8051F040单片机为核心的CAN总线智能节点的设计方法,给出了硬件原理图和软件流程图.该智能节点已经应用于某车辆模拟教学系统,应用情况良好.
【总页数】4页(P32-34,37)
【作者】王治国;高玉峰;刘亚龙;吕雪莲
【作者单位】装甲兵工程学院控制工程系,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院控制工程系,北京100072;北京航天飞控中心【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.基于微机C8051F040的CAN总线智能节点设计 [J], 杨鹏飞
2.基于C8051F040的CAN总线智能节点设计 [J], 李金刚;付志伟
3.基于C8051F040的CAN总线智能节点的设计 [J], 潘佚
4.基于C8051f040的CAN总线智能节点设计 [J], 何燕平;何辉;宋佳
5.基于C8051F040的CAN总线系统智能节点设计 [J], 计小军;王东兴
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MC9S12DG128的汽车CAN总线智能节点设计
C AN 协议 工作 原理 的描述 篇 幅很 大 , 面 简要 下 描述 作 为 软 件设 计 基 础部 分 的 C AN 总线 协 议 2 0 .
帧间 乏 +一 数据帧 — — —+L 问空问
报文 格式 。C AN 总线 的数 据 帧格式 如 图 3 示 。 所 C AN数 据桢 分为 : 始场 ( OF 、 开 S )仲裁 场 、 制 控 场 、 据 场 、 环冗 余校 验场 ( R 、 答 场 ( K) 数 循 C C)应 AC
摘
要: 介绍汽车 C AN总线节点设计 , 出一种基 于微 控制器 的总线节 点解 决方案 。选 择 MC S 2 1 8作为 节 提 9 1I 2  ̄
点控 制器 , 选用 P A8C 5 C 2 2 0收发器 ; 软件设计 编程 实现对 C N 总线节点 数据通 信 , A 即完成 C AN控 制器初 始化 、 报
行业 C AN 总 线更是 以其优 异 的性 能成 为 汽 车 局域 网 的发展 趋势 。 汽车 电子 控制 系统 采用 网络 化设 计 , 利用 C AN
口模 块包 括 S IS II A/ C P 、 C 、I C、 D、 AN、 W M 等 , P 在 汽 车 电 子 等 应 用 领 域 具 有 广 泛 的 用 途。
靠性 。
行数 据通 信 总线 。具 有 高 保 密 性 , 一 种 能 有效 支 是 持 分 布式 控 制 或 实 时 控 制 的 串 行 通 信 网络 。近 年 来 ,AN 总线 作 为一 种可 靠性 高 、 格低 廉 、 术成 C 价 技
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车ECU电路分析 ECU电路解析
正如在本章开始时我们讲到的,不同厂商的汽车电脑在功能上不是完全相同的,但结构组成和要紧功能是差不多一样的,因此我们以有代表性的BOSCH MOTRONIC系统为例进行ECU的电路分析。
1、BOSCH MOTRONIC系统结构图
BOSCH MOTRONIC系统在电子燃油喷射系统中极具代表性,国内生产的大部分车型采纳的差不多上BOSCH电子喷射系统。
图5.11为MOTRONIC系统框图,在此图中介绍了曲型电子燃油喷射系统的组成,各部分的联系情况,关于更好的了解电脑的工作过程,以至于分析故障与维修差不多上大有关心的。
图11 Motronic系统框图
1-燃油箱;2-燃油泵;3-燃油滤清器;4-燃油压力调节器;5-燃油脉动衰减器;6-电子操纵单元;7-分电器;8-喷油嘴;9-冷起动喷油嘴;10-节气门;11-节气门开关门;12-空气流量计;13-氧传感器;14-热敏开关;15-水温传感器;16-辅助空气阀;17-曲轴位置传感器;18-主继电器;19-燃油泵继电器
在图11中,电子操纵单元作为电控发动机的核心部分,由一8位/16位单片微机、集成电路和相关电子元件组成,英文表示为Electric control unit简称ECU。
其作用是接收各种传感器送来的信息,以它们进行运算、处理、推断后再发出指令信号,经输出电路进行功率放大后驱动想应的执行单元,从而实现对发动机的各种工况的操纵。
那个地点提级的ECU是各种操纵单元的统称,ECM/PCM则是发机操纵模组或动力操纵模组的缩写,是包含于ECU范围之内的。
2、BOSCH MOTRONIC1.3电路分析
汽车电子操纵单元(ECU),不论是BOSCH的MOTRONIC,福特的EEC IV、V,通用的P4、P6等,其最终的目的只有一个,让发动机工作的更出色,表现为动力更强劲,噪声小,污染低。
这是针对发动机系统而言,其他系统也是一样,每个系统都有自己的目标,这就看起来是电视机一样,世界各国生产的电视机,不管是哪个厂家的,差不多上要以接收电视节目为目的。
基于如此一种认识,我们能够把ECU抽样化的分成几个部分,见图12所示。
从图中我们能够看到,ECU由MCU(微处理器)、输入电路、输出电路、A/D转换器及部分组成,各部分功能描述如下:(1)输入电路
从传感器来的信号,首先进入输入回路,关于模拟信号,去除杂波干扰,把小信号进行放大,把正弦波变成矩形波;关于数字信号,进行缓冲后可直接与MCU或I/O扩展电路连接。
同时输入电路还将电源电压转换成适合微机使用的工作晓以大义。
即输入电路是对信号进行整形同时提供系统各部分所需要的不现的工作电压。
(2)A/D转换器
输入ECU的传感器信号有两种:一种是模拟信号,另一种是数字信号。
信号的形态不同,输入ECU内的处理方法也不一样。
数字信号可直接送入微处理器,模拟信号则要通过A/D转换器(模拟/数字转换器)转换成数字信号才送入微处理器。
早期的MCU自身没有A/D转换器功能,为完成如此的转换,能够通过扩展A/D转换器来实现。
如奔驰的CIS-E系统的确实是通过A/D0809如此一个A/D转换器来实现的。
较新类型的MCU由于自身具有A/D转换功能,已不需要进行外部扩展了。
(3)输出电路
它是微机与执行器之间的联系电路。
由于微机输出的是数字信号,而且电流专门小,一般是不能驱执行器工作的。
通过输出回路后,通过其中功率三极管或功率MOS管的放大作用,提供足够的驱动电流,大部分的负载工作于开关状态下。
在汽车那个特定的工作环境,大部分的执行器/驱劝器都与线圈有关,从电磁喷油器到电磁阀、各种马达、继电器、包括点火线圈,等等,因此有人夸张的讲,汽车的输出电路的任务实质确实是驱动线圈工作。
我们不管如此的结论是不是太武断,但这种描述的确比较容易理解。
(4)微处理器(MCU)
它是ECU的核心部分,由中央处理器(CPU)、存储器(ROM -RAM)、输入/输出口(I/O)等组成。
它能依照需要,用内存的
程序和数据对各种传感器送来的信号进行比较、运算和修正,并将处理结果以指令的形式送至输出电路。
驱动相关元件,完成操纵功能。
图13、图14为德国宝马汽车所采纳的Motronic M1.3系统电子操纵单元的内部原理图。
(3)输出电路
它是微机与执行器之间的联系电路。
由于微机输出的是数字信号,而且电流专门小,一般是不能驱执行器工作的。
通过输出回路后,通过其中功率三极管或功率MOS管的放大作用,提供足够的驱动电流,大部分的负载工作于开关状态下。
在汽车那个特定的工作环境,大部分的执行器/驱劝器都与线圈有关,从电磁喷油器到电磁阀、各种马达、继电器、包括点火线圈,等等,因此有人夸张的讲,汽车的输出电路的任务实质确实是驱动线圈工作。
我们不管如此的结论是不是太武断,但这种描述的确比较容易理解。
(4)微处理器(MCU)
它是ECU的核心部分,由中央处理器(CPU)、存储器(ROM -RAM)、输入/输出口(I/O)等组成。
它能依照需要,用内存的程序和数据对各种传感器送来的信号进行比较、运算和修正,并
将处理结果以指令的形式送至输出电路。
驱动相关元件,完成操纵功能。
图13、图14为德国宝马汽车所采纳的Motronic M1.3系统电子操纵单元的内部原理图。
图13BMW Motronic M1.3
图14 BMW Motronic M1.3。